Изобретение относится к многопозиционным радиосистемам пеленгации объектов в радиодиапазоне длин волн на малой дальности.
Радиосистема состоит из нескольких n (n≥2) взаимно удаленных и ориентированных в пространстве радиоприемников с антенными решетками (АР), составленными из нескольких приемных элементов, которые принимают отраженный от объектов радиосигнал. Приемники осуществляют электронное сканирование общей зоны обзора узкой диаграммой направленности антенн (ДНА) порядка 1°-3°, меняя положение линии визирования (биссектрисы ДНА) в растровом (построчном) режиме на величину заданных шагов по азимуту и углу места, составляющих определенную часть ширины ДНА.
Радиопередатчик, расположенный отдельно от радиоприемников и меняющий свое положение в пространстве, посылает в отдельные моменты времени t периодический радиосигнал s(t) в сторону зоны обзора радиоприемников, в которой находятся несколько объектов наблюдения (воздушных или наземных, неподвижных или движущихся).
При каждом положении линий визирования антенн, сканирующих последовательно во времени, принятые в k-х приемниках сигналы sk(t),  проходят тракт первичной обработки, преобразуются в измерительных каналах в комплексные спектры. После чего выделяются спектральные составляющие на тех частотах, на которых амплитуды превышают порог обнаружения полезного сигнала одновременно во всех каналах.
проходят тракт первичной обработки, преобразуются в измерительных каналах в комплексные спектры. После чего выделяются спектральные составляющие на тех частотах, на которых амплитуды превышают порог обнаружения полезного сигнала одновременно во всех каналах.
Задача заключается в определении пространственных координат и векторов скоростей всех объектов с учетом моментов времени tk,  начала периодов сканирования.
начала периодов сканирования.
Известны способы [1-3] определения пространственных координат нескольких объектов в многопозиционной системе приемников. Способы основаны на распределении векторов направлений на предполагаемые объекты по принадлежности конкретным объектам, то есть нахождении сопряженных векторов. Вычисление пространственных координат объектов осуществляется через оценки дальностей до объектов, которые находятся путем решения системы уравнений линейной зависимости сопряженных векторов.
Однако все эти способы не показывают, как находятся координаты векторов направлений на объекты. Возьмем в качестве прототипа способ определения пространственного положения, скорости и ускорения объекта в пассивной сканирующей системе видения [3], который применительно к нескольким объектам наблюдения алгоритмически сводится к следующему.
1. Размещают в пространстве несколько взаимно ориентированных приемников, сканирующих зону обзора.
2. Формируют в одном периоде сканирования орты ak(i) векторов i-x направлений на объекты  в системах координат приемников с запоминанием моментов времени tk (i) их образования.
в системах координат приемников с запоминанием моментов времени tk (i) их образования.
3. Записывают достаточное условие сопряжения векторов в системе координат 1-го приемника с учетом моментов времени tk(i) как систему линейных уравнений в матричной форме, неизвестными которой являются дальности rk(i) до объектов и координаты векторов скорости.
4. Распределяют орты направлений по принадлежности конкретным объектам путем проверки выполнения достаточного условия сопряжения векторов, и находят оценки дальностей  до объектов решением системы уравнений методом обратной матрицы.
до объектов решением системы уравнений методом обратной матрицы.
5. Умножают оценки дальностей  на орты ak(i) векторов направлений и получают оценки пространственных координат объектов
на орты ak(i) векторов направлений и получают оценки пространственных координат объектов  в системах координат приемников
в системах координат приемников  Дополнительно составляют векторы скоростей из оценок их координат.
Дополнительно составляют векторы скоростей из оценок их координат.
Данный способ обладает следующими недостатками.
1. Способ не показывает, как находятся координаты ортов векторов направлений на объекты.
2. Применительно к радиосистеме с электронным сканированием малые разности моментов времени фиксации ортов в приемниках в течение одного общего периода сканирования приводят к неустойчивости процесса обращения матрицы системы, элементы столбцов которой оказываются близкими к нулю. Это приводит к большим ошибкам оценок координат векторов скоростей. По этой причине нахождение векторов скоростей по одному периоду при электронном сканировании становится невозможным.
Предлагаемое техническое решение направлено на устранение этих недостатков, а именно на определение координат ортов направлений на объекты за счет измерения угловых координат объектов и нахождение пространственных координат объектов вместе с оценками векторов их движения за счет увеличения времени между периодами сканирования в приемниках при наличии передатчика.
Технический результат предлагаемого технического решения достигается применением способа определения пространственных координат и скоростей объектов сканирующей многопозиционной радиосистемой, который заключается в размещении в пространстве нескольких радиоприемников, сканирующих зону обзора и взаимно ориентированных матрицами поворота и базовыми векторами, соединяющими системы координат приемников, формировании в одном периоде сканирования ортов векторов направлений на объекты, распределении этих ортов по принадлежности конкретным объектам с учетом моментов времени образования ортов и нахождении оценок дальностей до объектов и координат векторов скоростей путем решения системы уравнений линейной зависимости векторов, отличающийся тем, что добавляют внешний радиопередатчик, и сканирование антенн приемников осуществляют электронным образом в последовательности периодов с задержкой во времени, при этом в каждом периоде сканирования сигналы, переданные передатчиком и принятые приемниками, преобразуют в комплексные спектры, выделяют спектральные составляющие, амплитуды которых превышают порог обнаружения полезного сигнала и по факту превышения порога определяют амплитудно-фазовым методом угловые координаты азимута и угла места положения объектов, после чего на основе угловых координат находят орты векторов направлений на объекты в системах координат приемников, группируют орты по принадлежности конкретным объектам, затем из координат ортов каждой группы и разностей моментов времени сканирования составляют по определенному правилу матрицу А, вычисляют матрицу весовых коэффициентов W=(ATA)-lAT, где "T" и "-1" - символы транспонирования и обращения матрицы, умножают матрицу W слева на вектор В координат базовых векторов и получают вектор X=W⋅В оценок дальностей и координат вектора скорости для каждой группы сопряженных векторов, умножают оценки дальностей на орты и получают вектор пространственных координат объекта.
Расчетная часть. Алгоритмически способ сводится к следующему.
1. Размещают в пространстве n приемников (n≥3), ориентированных матрицами Pk поворота осей координат по отношению к первому приемнику и базовыми векторами bk, соединяющими центры систем координат  Ориентацию систем координат осуществляют с помощью способа [1], где в качестве контрольных объектов используются несколько пространственно распределенных радиомаяков.
Ориентацию систем координат осуществляют с помощью способа [1], где в качестве контрольных объектов используются несколько пространственно распределенных радиомаяков.
Радиопередатчик, произвольно расположенный в пространстве относительно приемников, периодически излучает сигнал s(t) на определенной радиочастоте. В последовательности моментов времени tk периодов сканирования k-х приемников  в каждом приемнике выполняют следующие операции.
в каждом приемнике выполняют следующие операции.
2. В k-м временном периоде осуществляют электронное сканирование антенной k-го приемника с узкой ДНА по угломерному пространству зоны обзора. При каждом положении линии визирования принимаемый сигнал sk(t) проходит тракт первичной обработки и преобразуются в q-x измерительных каналах  в комплексные спектры
в комплексные спектры  на j-x промежуточных частотах ƒj. После чего выделяют спектральные составляющие
на j-x промежуточных частотах ƒj. После чего выделяют спектральные составляющие  на тех частотах ƒjk, на которых максимум амплитуды
на тех частотах ƒjk, на которых максимум амплитуды  превышает порог обнаружения полезного сигнала одновременно во всех q-x каналах. Запоминают угловые координаты азимута ϕk(i) и угла места θk(i) по факту обнаружения каждого i-го полезного сигнала
превышает порог обнаружения полезного сигнала одновременно во всех q-x каналах. Запоминают угловые координаты азимута ϕk(i) и угла места θk(i) по факту обнаружения каждого i-го полезного сигнала  за период сканирования зоны обзора. Тем самым находят угловые координаты объектов методом максимума амплитуды.
за период сканирования зоны обзора. Тем самым находят угловые координаты объектов методом максимума амплитуды.
3. Для уменьшения погрешности измерения угловых координат, которая в амплитудном методе составляет половину шага сканирования Δϕ/2 и Δθ/2, дополнительно из комплексных составляющих  выделяют аргументы - фазы
выделяют аргументы - фазы  в q-x каналах
в q-x каналах  и методом разности фаз находят более точные оценки угловых координат. При этом совместное применение амплитудного и фазового методов устраняет проблему неоднозначности измерения фазы за счет приема сигнала в направлении, близком к биссектрисе узкой ДНА с шириной порядка 1°-3°. Кроме того, если в зоне обзора находятся несколько объектов, не различимых по скорости и доплеровской частоте, то амплитудный метод позволяет их обнаружить.
и методом разности фаз находят более точные оценки угловых координат. При этом совместное применение амплитудного и фазового методов устраняет проблему неоднозначности измерения фазы за счет приема сигнала в направлении, близком к биссектрисе узкой ДНА с шириной порядка 1°-3°. Кроме того, если в зоне обзора находятся несколько объектов, не различимых по скорости и доплеровской частоте, то амплитудный метод позволяет их обнаружить.
В случае движущихся объектов максимум амплитуд фиксируется на доплеровских частотах.
4. На основе угловых координат ϕk(i)=ϕk и θk(i)=θk определяют орты ak(i),  векторов направлений на объекты по формуле
векторов направлений на объекты по формуле
ak(i)=(akx, aky, akz)=(cosθk sinϕk, sinθk, cosθk cos ϕk),
в местных системах координат Ok, Xk, Yk, Zk, где оси OkZk направлены в сторону объекта, оси OkXk и OkZk расположены в горизонтальной плоскости, ось OkYk - в вертикальной, угол ϕk отсчитывается от оси OkZk в плоскости Ok, Xk, Zk, угол θk - в вертикальной плоскости относительно
5. Составляют неповторяющиеся комбинации из n векторов ak(ik),  ik∈{1, 2, …, m}. Для каждой группы векторов а1, а2, …, an, предположительно принадлежащих одному объекту, линейная зависимость векторов записывается в виде векторного уравнения в системе координат 1-го приемника с учетом возможного перемещения объекта на промежутке [t1, tk]:
ik∈{1, 2, …, m}. Для каждой группы векторов а1, а2, …, an, предположительно принадлежащих одному объекту, линейная зависимость векторов записывается в виде векторного уравнения в системе координат 1-го приемника с учетом возможного перемещения объекта на промежутке [t1, tk]:

где rk - дальности до предполагаемого объекта; V1=(ν1x, νly, νlz)T - вектор скорости в системе координат 1-го приемника; ek - векторы ошибок сопряжения а1, а2, …, an. В матричной форме для случая n=3 векторное уравнение записывается как: 
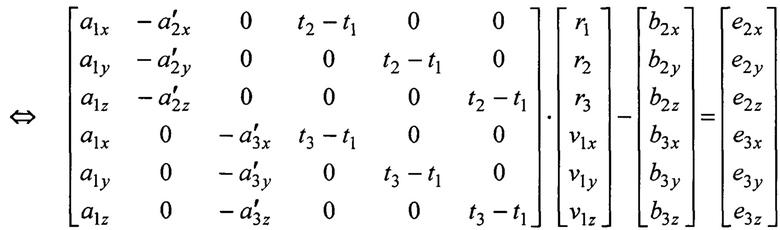
По критерию минимума квадрата нормы вектора Е ошибок сопряжения:
J=||Е||2=(АХ-В)Т(АХ-В)
находят МНК-оценки  дальностей и скоростей:
дальностей и скоростей:
 W=(ATA)-lAT.
W=(ATA)-lAT.
При обращении матрицы предусматривается процедура регуляризации.
6. Выбирают m неповторяющихся комбинаций a1(i), a2(i), …, an(i) с наименьшими значениями показателей сопряжения 
 и вычисляют векторы оценок пространственных координат объектов
и вычисляют векторы оценок пространственных координат объектов  в системах координат k-х приемников. Устанавливают векторы скоростей
в системах координат k-х приемников. Устанавливают векторы скоростей  в системе координат 1-го приемника.
в системе координат 1-го приемника.
7. В частном случае применения двух приемников (n=2) матрица А системы уравнений уменьшается до размеров первых трех строк и двух столбцов, а вектор X содержит оценки двух дальностей. При этом скорость объектов оценивается по двум периодам наблюдения. Наоборот, при увеличении числа приемников (n>3) размеры матрицы А увеличиваются.
Заключение. Предложенный способ может быть использован в существующих радиосистемах пеленгации неподвижных и движущихся объектов на малой дальности с точностью определения угловых координат, характерной для амплитудно-фазовых методов. Реализация способа не требует привязки к карте местности и позволяет обнаруживать объекты, не разрешимые по доплеровской частоте, за счет лучшего пространственного разрешения объектов при сканировании зоны обзора антенной узкой ДНА.
Литература
1. Патент RU 2682382. Способ ориентации систем координат наблюдателей в пассивной системе видения. Опубл. 19.03.19. Бюл. №8.
2. Патент RU 2694023. Способ нахождения сопряженных векторов направлений на движущиеся объекты. Опубл. 08.07.2019. Бюл. №19.
3. Патент RU 2700275. Способ определения пространственного положения, скорости и ускорения объекта в пассивной сканирующей системе видения Опубл. 16.09.2019. Бюл. №26.
Использование: для создания многопозиционных радиосистем пеленгации объектов в радиодиапазоне длин волн на малой дальности. Сущность изобретения заключается в том, что способ определения пространственных координат и скоростей объектов сканирующей многопозиционной радиосистемой заключается в размещении в пространстве нескольких радиоприемников, сканирующих зону обзора и взаимно ориентированных матрицами поворота и базовыми векторами, соединяющими системы координат приемников, формировании в одном периоде сканирования ортов векторов направлений на объекты, распределении этих ортов по принадлежности конкретным объектам с учетом моментов времени образования ортов и нахождении оценок дальностей до объектов и координат векторов скоростей путем решения системы уравнений линейной зависимости векторов, при этом добавляют внешний радиопередатчик, и сканирование антенн приемников осуществляют электронным образом в последовательности периодов с задержкой во времени, при этом в каждом периоде сканирования сигналы, переданные передатчиком и принятые приемниками, преобразуют в комплексные спектры, выделяют спектральные составляющие, амплитуды которых превышают порог обнаружения полезного сигнала и по факту превышения порога определяют амплитудно-фазовым методом угловые координаты азимута и угла места положения объектов, после чего на основе угловых координат находят орты векторов направлений на объекты в системах координат приемников, группируют орты по принадлежности конкретным объектам, затем из координат ортов каждой группы и разностей моментов времени сканирования составляют по определенному правилу матрицу А, вычисляют матрицу весовых коэффициентов W=(ATA)-1AT, где “T” и “-1” - символы транспонирования и обращения матрицы, умножают матрицу W слева на вектор В координат базовых векторов и получают вектор X=W⋅В оценок дальностей и координат вектора скорости для каждой группы сопряженных векторов, умножают оценки дальностей на орты и получают вектор пространственных координат объекта. Технический результат: обеспечение возможности определения координат ортов направлений на объекты за счет измерения угловых координат объектов и нахождение пространственных координат объектов вместе с оценками векторов их движения за счет увеличения времени между периодами сканирования в приемниках при наличии передатчика.
Способ определения пространственных координат и скоростей объектов сканирующей многопозиционной радиосистемой, заключающийся в размещении в пространстве нескольких радиоприемников, сканирующих зону обзора и взаимно ориентированных матрицами поворота и базовыми векторами, соединяющими системы координат приемников, формировании в одном периоде сканирования ортов векторов направлений на объекты, распределении этих ортов по принадлежности конкретным объектам с учетом моментов времени образования ортов и нахождении оценок дальностей до объектов и координат векторов скоростей путем решения системы уравнений линейной зависимости векторов, отличающийся тем, что добавляют внешний радиопередатчик, и сканирование антенн приемников осуществляют электронным образом в последовательности периодов с задержкой во времени, при этом в каждом периоде сканирования сигналы, переданные передатчиком и принятые приемниками, преобразуют в комплексные спектры, выделяют спектральные составляющие, амплитуды которых превышают порог обнаружения полезного сигнала и по факту превышения порога определяют амплитудно-фазовым методом угловые координаты азимута и угла места положения объектов, после чего на основе угловых координат находят орты векторов направлений на объекты в системах координат приемников, группируют орты по принадлежности конкретным объектам, затем из координат ортов каждой группы и разностей моментов времени сканирования составляют по определенному правилу матрицу А, вычисляют матрицу весовых коэффициентов W=(ATA)-1AT, где “T” и “-1” - символы транспонирования и обращения матрицы, умножают матрицу W слева на вектор В координат базовых векторов и получают вектор X=W⋅В оценок дальностей и координат вектора скорости для каждой группы сопряженных векторов, умножают оценки дальностей на орты и получают вектор пространственных координат объекта.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ, СКОРОСТИ И УСКОРЕНИЯ ОБЪЕКТА В ПАССИВНОЙ СКАНИРУЮЩЕЙ СИСТЕМЕ ВИДЕНИЯ | 2018 |
|
RU2700275C1 |
| СПОСОБ НАХОЖДЕНИЯ СОПРЯЖЕННЫХ ВЕКТОРОВ НАПРАВЛЕНИЙ НА ДВИЖУЩИЕСЯ ОБЪЕКТЫ | 2018 |
|
RU2694023C1 |
| СПОСОБ ОРИЕНТАЦИИ СИСТЕМ КООРДИНАТ НАБЛЮДАТЕЛЕЙ В ПАССИВНОЙ СИСТЕМЕ ВИДЕНИЯ | 2018 |
|
RU2682382C1 |
| US 20040233102 A1, 25.11.2004 | |||
| WO 1998028634 A2, 02.07.1998 | |||
| WO 2011149738 A1, 01.12.2011 | |||
| US 20140050052 A1, 20.02.2014. | |||

