Изобретение относится к робототехнике и может применяться в качестве конструктора конфигурируемого робота, предназначенного для обучения навыкам конструирования и исследования свойств и характеристик мобильного робота, в частности, при выполнении заданий, имитирующих сельскохозяйственную деятельность.
Известны конфигурируемые мобильные роботы, конструкция которых предполагает возможность изменения их структуры путем замены функционального элемента или использования сменных функциональных элементов, определяющих свойства и функциональные возможности собранного робота.
Так, в частности, известен конфигурируемый мобильный робот [RU 2729473], используемый для обучения навыкам сборки и программирования роботов, выполненный в виде мобильной самодвижущейся четырехколесной двухярусной платформы.
Данное устройство включает корпус, выполненный в виде металлического каркаса и жестко закрепленных на его нижней и верхней поверхностях полимерных пластин, на которых установлены функциональные блоки робота, включающие источник питания, контроллер, предназначенный для программирования и управления роботом, колеса с моторами редукторами, управляемыми контроллером.
При этом устройство содержит подключаемые к контроллеру съемные унифицированные блоки, которые крепятся к корпусу с помощью соединительных элементов, определяющие функциональную направленность робота и представляющие собой, в частности, геркон, датчик прикосновения, датчик преграды, датчик Холла и другие. Указанные съемные блоки выполнены в виде унифицированных по габаритам плат, расположенных в коробчатом корпусе, которые являются взаимозаменяемыми как по механическому креплению, так и по подключению к контроллеру.
Недостатком данного устройства является использование для конструирования робота только унифицированных по габаритам съемных блоков, имеющих размеры, позволяющие размещать их на корпусе устройства, что ограничивает возможность его конфигурирования. Кроме того, недостатком устройства является сложность и трудоемкость осуществления замены съемных блоков из-за необходимости использования большого количества соединительных элементов.
Известен конфигурируемый мобильный робот [RU 205343], выбранный в качестве ближайшего аналога.
Данный робот выполнен в виде самоходной платформы, на которой смонтированы колесное шасси, источник питания, бортовая вычислительная сеть, предназначенная для программирования и управления роботом, а также устройство обзора пространства перед платформой, выполненное в виде видеокамеры. Самоходная платформа включает нижнее и верхнее пластинчатые основания, содержащие сетку технологических отверстий для крепежных элементов, используемых для закрепления на основаниях конструктивных узлов робота. Робот снабжен дисплеем, расположенным на верхнем основании, предназначенным для индикации справочной информации.
Наличие на верхнем и нижнем основаниях сетки технологических отверстий для крепежных элементов обуславливает возможность закрепления конструктивных узлов робота на поверхности оснований, в том числе, включать в структуру робота дополнительное съемное оборудование, придающее ему определенную функцию. При этом на пластинчатых основаниях можно закреплять сменные конструктивные узлы, отличающиеся по габаритам.
Это расширяет круг используемого для конфигурирования робота оборудования.
Однако сменные конструктивные узлы, придающие определенную функциональную направленность роботу, размещены на поверхности пластинчатых оснований корпуса, что ограничивает размеры и количество используемых сменных конструктивных узлов. Кроме того, закрепление сменных конструктивных узлов на пластинчатых основаниях корпуса с помощью ряда крепежных элементов, устанавливаемых в имеющихся в основаниях технологических отверстиях, обуславливает сложность и трудоемкость осуществления монтажа съемного оборудования.
Указанные факторы ограничивают возможность конфигурирования структуры рассматриваемого устройства.
Технической проблемой, решаемой при реализации изобретения, является расширение возможности конфигурирования мобильного робота при обеспечении простоты и надежности монтажа сменного оборудования.
Сущность изобретения заключается в том, что в конфигурируемом мобильном роботе, выполненном в виде самоходной платформы, содержащий корпус, на котором смонтированы функциональные блоки робота, включающие источник питания, бортовой компьютер, колесную ходовую часть, а также смонтированное на корпусе съемное оборудование, определяющее функциональную направленность робота, согласно изобретению робот содержит держатель для съемного оборудования, смонтированный на корпусе с возможностью поворота относительно поперечной оси робота, сменное оборудование выполнено в виде механического модуля, соединенного с держателем с помощью разъемного соединительного узла, включающего первый соединительный элемент, скрепленный со съемным механическим модулем, имеющий выступ, второй соединительный элемент, скрепленный с держателем, имеющий паз, ответный выступу, первый и второй соединительные элементы выполнены с возможностью размещения указанного выступа в указанном пазу с обеспечением взаимного соединения указанных соединительных элементов, при этом соединительный узел содержит накладной пластинчатый элемент, установленный поверх первого и второго соединительных элементов с обеспечением фиксации взаимного положения указанных элементов соединительного узла в сборе.
Наличие у робота закрепленного на корпусе держателя и выполнение съемного оборудования в виде навесного механического модуля, скрепленного с держателем, обеспечивает возможность использования широкого круга сменного оборудования с различным функциональным назначением без ограничений, накладываемых на габариты сменного оборудования, которые присутствуют в случае его размещения на поверхности корпуса робота.
Использование для монтажа универсального быстроразъемного соединительного узла, простого по конструкции, выполненного по типу замкового соединения «выступ - паз», обеспечивает удобство и быстроту монтажа съемного оборудования при обеспечении надежности соединения.
При этом использование в соединительном узле накладного плоского элемента, закрепляемого поверх первого соединительного элемента, имеющего выступ, и второго соединительного элемента, имеющего ответный паз, при положении указанных соединительных элементов узла в сборе, обеспечивает фиксацию их взаимного положения, что повышает надежность закрепления съемного оборудование на держателе корпуса.
Таким образом, техническим результатом, достигаемым при реализации изобретения, является расширение возможности конфигурирования мобильного робота при обеспечении простоты и надежности монтажа сменного оборудования.
В частном случае изобретения, когда выступ первого соединительного элемента выполнен в виде тела, имеющего сужающуюся к низу конусообразную форму, паз второй соединительной детали имеет форму, соответствующую форме выступа первой соединительной детали, накладной пластинчатый элемент выполнен в виде V- образной крепежной пластины, закрепляемой с помощью крепежных элементов на верхней поверхности первого и второго соединительных элементов узла в сборе, при этом в верхней части указанных элементов выполнены выемки, обеспечивающие установку накладной планки заподлицо с верхними поверхностями первого и второго соединительных элементов, достигаются плотное и устойчивое к нагрузкам соединение соединительных деталей узла, а также повышается жесткость конструкции соединительного узла в сборе и высокая надежность его работы.
В частном случае изобретения в качестве съемного оборудования использован механический модуль, имитирующий схват, включающий сервопривод и исполнительный механизм, выполненный в виде конструктивного узла, содержащего зажимные губки, обеспечивающие зажим захватываемых предметов. В указанном случае обеспечивается сельскохозяйственная функциональнаь направленность робота, и он может быть использован для выполнения на специальном полигоне заданий, имитирующих прополку, сбор урожая, перевозку грузов и прочее.
В частном случае изобретения в качестве съемного оборудования использован механический модуль, содержащий сервопривод и исполнительный механизм, включающий первый конструктивный узел, выполненный в виде горизонтально ориентированных расположенных под углом друг к другу плоских панелей, имитирующих ковш, и смонтированный над первым конструктивным узлом второй конструктивный узел, имитирующий крюк. В указанном случае обеспечивается сельскохозяйственная функциональная направленность робота, и он может быть использован для выполнения на специальном полигоне заданий, имитирующих сгребание урожая, перевозку бидонов и других объектов за крючки, перевозку бочек и стогов сена и прочее.
В частном случае изобретения в качестве съемного оборудования использован механический модуль, включающий размещенный в корпусе электромагнит, предназначенный для сбора объектов, обладающих магнитными свойствами. В указанном случае обеспечивается сельскохозяйственная функциональная направленность робота, и он может быть использован для выполнения на специальном полигоне заданий, имитирующих сбор урожая из труднодоступных мест, шариков, имитирующих картофель, из лунок и прочее.
В частном случае изобретения в качестве съемного оборудования использован механический модуль, имитирующий подъемные вилы, содержащий сервопривод и исполнительный механизм, выполненный в виде конструктивного узла, включающего основание с двумя плоскими продольно ориентированными планками, закрепленными на его боковых сторонах. В указанном случае обеспечивается сельскохозяйственная функциональная направленность робота, и он может быть использован для выполнения на специальном полигоне заданий, имитирующих перевозку продуктов, отходов и прочее.
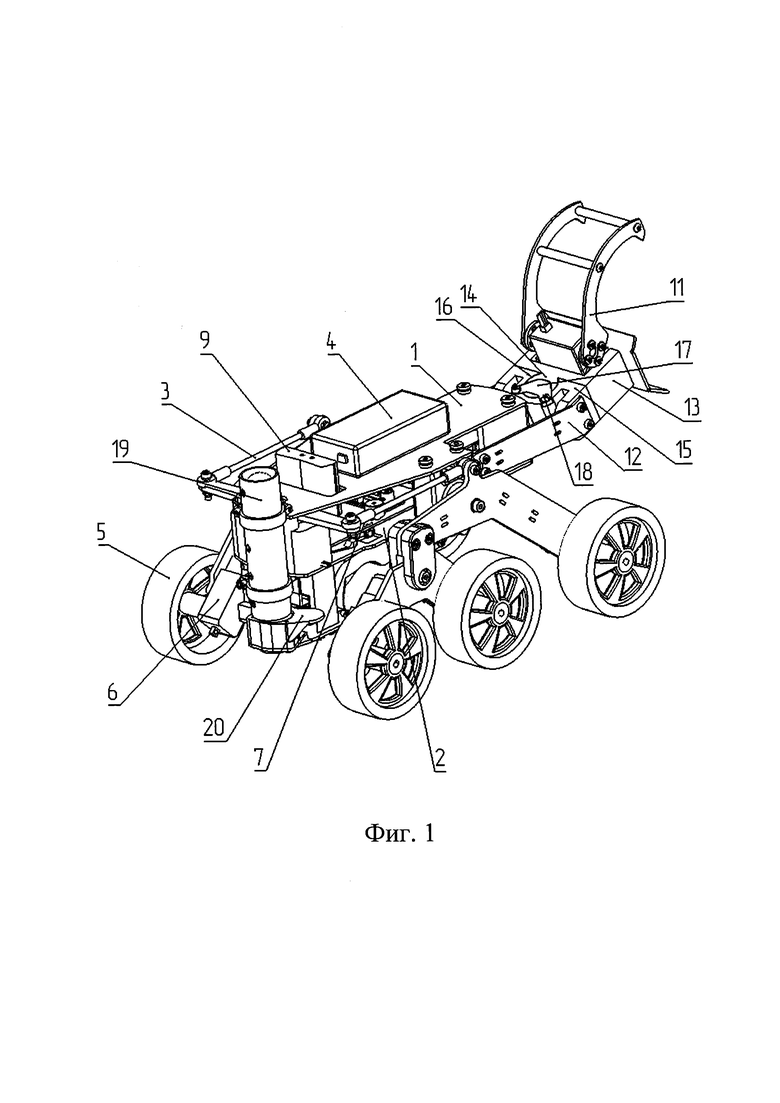
На фиг. 1 представлен общий вид устройства без крышки (вид сзади).
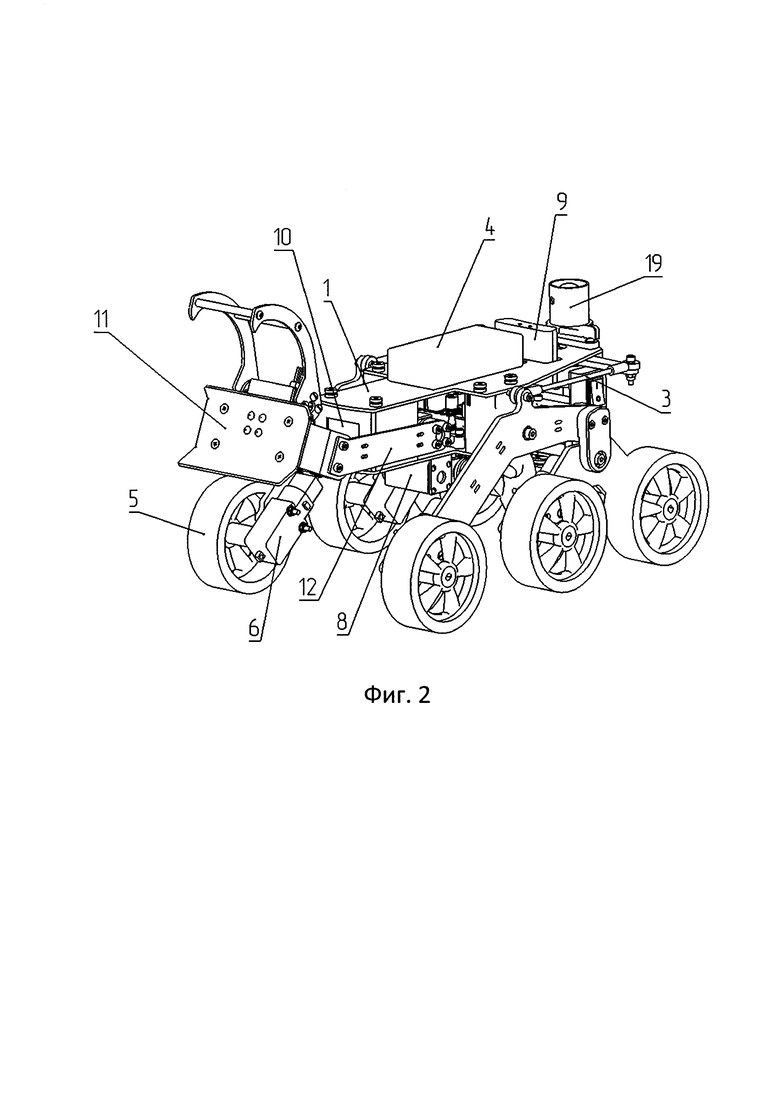
На фиг. 2 представлен общий вид заявляемого устройства без крышки (вид спереди).
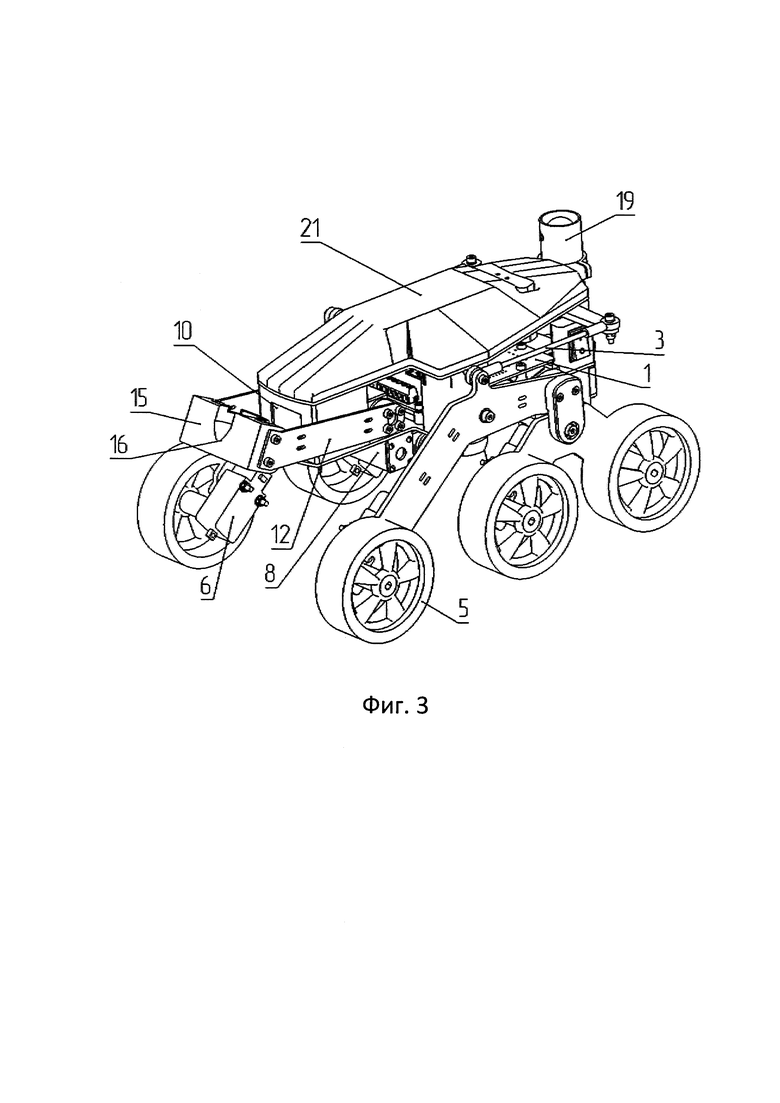
На фиг. 3 представлен общий вид заявляемого устройства с крышкой без сменного оборудования (вид спереди).
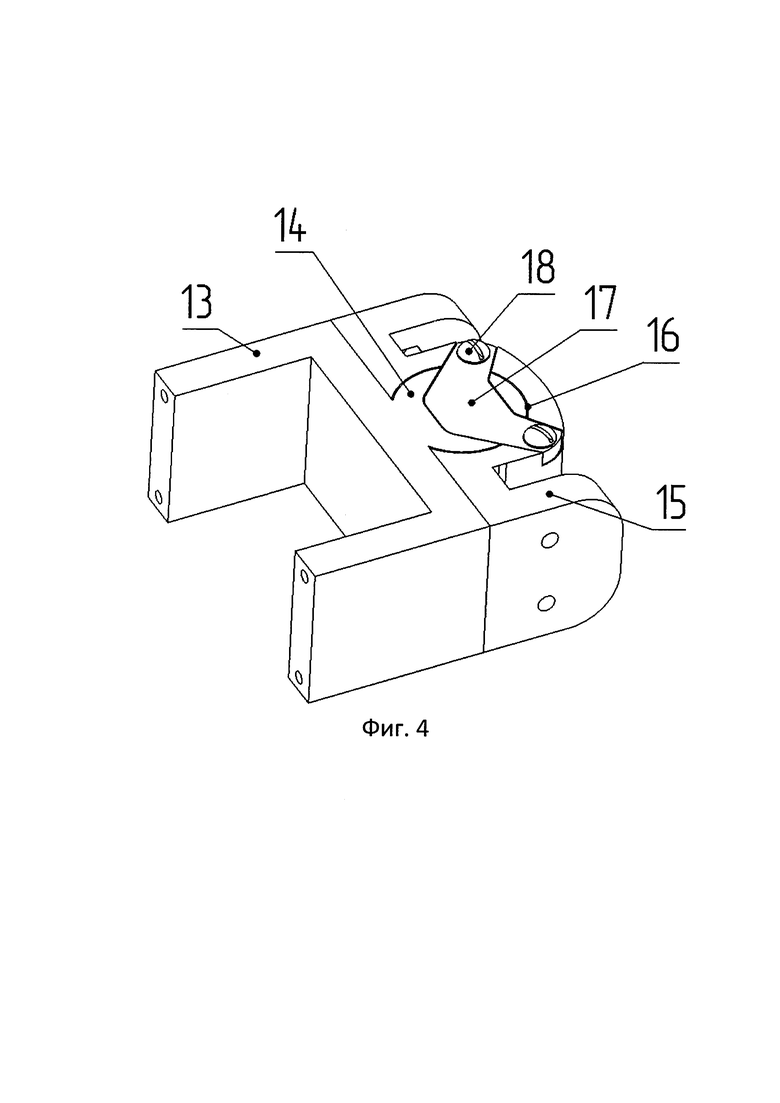
На фиг. 4 представлен общий вид соединительного узла в сборе.
Конструкция и работа устройства рассмотрена на примере агро - робота, предназначенного для выполнения заданий на специальном полигоне, имитирующих сельскохозяйственную деятельность.
Устройство содержит корпус, включающий верхнее и нижнее основания соответственно 1 и 2, выполненные в виде плоских пластин (фиг. 1, 2, 3). Крепление оснований 1 и 2 друг с другом, а также крепление функциональных конструктивных узлов и деталей устройства на основаниях 1 и 2 выполнено с помощью каркасных элементов, выполненных, в частности, в виде скоб, стоек, тяг (на фиг. 1, 2, 3 позицией 3 обозначен один из каркасных элементов, выполненный в виде тяги).
Устройство содержит размещенный на верхнем основании 1 аккумуляторный блок 4 (фиг. 1, 2), в котором установлены две аккумуляторные батарейки источника питания, выполненные с возможностью зарядки от зарядного устройства (на чертеже не показано).
Устройство содержит колесную ходовую часть, содержащую, в частности, шасси марсохода, содержащее шесть колес 5 (на фиг. 1, 2, 3 позицией 5 обозначено одно колесо). Каждое колесо 5 приводится во вращение мотором редуктором 6 (на фиг. 1, 2, 3 позицией 6 обозначен один мотор редуктор). Указанное шасси позволяет маневрировать, в том числе, разворачиваться на 360 градусов, на неровной поверхности, имитирующей грунтовую поверхность в сельской местности.
На нижнем основании 2 смонтированы узлы, входящие в состав бортового компьютера 7 (фиг. 1), предназначенного для программирования и управления роботом. Бортовой компьютер 7 выполнен, в частности, на базе управляющего контроллера Arduino (на фиг. 1 позицией 7 обозначена основная плата бортового компьютера).
Бортовой компьютер 7 управляет всеми подвижными узлами устройства с помощью сервоприводов 8 (на фиг. 2, 3 позицией обозначен один сервопривод 8).
Устройство содержит систему связи, включающую закрепленный на основании 1 антенный блок 9 (фиг. 1, 2). С помощью указанной системы связи осуществляется управление бортовым компьютером 7 с пульта управления по беспроводной связи или с мобильного телефона, снабженного соответствующим приложением, с использованием модуля Bluetooth.
Устройство включает дисплей 10 (фиг. 2, 3), закрепленный на нижнем основании 2, который обеспечивает возможность индикации справочной информации о параметрах функционирования узлов устройства, что позволяет контролировать его работу.
Устройство также содержит оборудование, определяющее его функциональную направленность.
В качестве указанного оборудования использован навесной съемный механический модуль 11 (фиг. 1, 2,), закрепленный на корпусе с помощью держателя 12 (фиг. 1, 2, 3). Держатель 12, в частности, выполнен, в виде рамной П-образной конструкции, включающей две боковые планки (позицией не обозначены), расположенные на боковых сторонах корпуса, и переднюю поперечную планку (позицией не обозначена), расположенную перед передней поверхностью корпуса.
Держатель 12 установлен на корпусе с возможностью поворота вокруг поперечной оси устройства. В частности, боковые планки держателя 12 установлены на оси сервопривода (на чертеже не виден), закрепленного на верхней поверхности основания 2 с обеспечением ориентации указанной оси поперек указанного основания.
В качестве навесного съемного механического модуля 11 использован, в частности, модуль, имитирующий ковш с крюком, который включает снабженный сервоприводом (на чертеже не виден) исполнительный механизм, содержащий имитирующий ковш первый конструктивный узел, выполненный в виде горизонтально ориентированных расположенных под углом друг к другу плоских панелей (на чертеже позицией не обозначены), и смонтированный над ним второй конструктивный узел, имитирующий крюк (на чертеже позицией не обозначен).
Навесной съемный механический модуль 11 соединен с держателем 12 с помощью универсального разъемного соединительного узла (фиг. 1, 3, 4). Указанный узел включает первый соединительный элемент 13, выполненный с возможностью крепления с навесным съемным механическим модулем 11 имеющий выступ 14, и второй соединительный элемент 15 выполненный с возможностью скрепления с держателем 12, имеющий паз 16, ответный выступу 14. Первый и второй соединительные элементы 13 и 15 выполнены с возможностью размещения указанного выступа 14 в указанном пазу 16 с обеспечением их взаимного соединения, при этом соединительный узел содержит накладной пластинчатый элемент 17, установленный поверх первого и второго соединительных элементов 13 и 15 с обеспечением фиксации взаимного положения указанных элементов соединительного узла в сборе.
Боковая поверхность выступа 14, в частности, имеет конусообразную сужающуюся к низу форму, например, форму цилиндра, переходящего в направлении сверху вниз в усеченный конус.
Форма внутренней поверхности паза 16 соответствует форме части боковой поверхности выступа 14, выступающей наружу относительно наружной поверхности первого соединительного элемента 13. При этом в пазу 16 имеется открытый щелевой участок (на чертеже позицией не обозначен) под часть боковой поверхности выступа 14, примыкающей к наружной поверхности первого соединительного элемента 13
Накладной пластинчатый элемент 17 выполнен, в частности, в виде V-образной крепежной пластины, закрепляемой с помощью крепежных элементов 18 (на чертеже позицией обозначен один крепежный элемент) на верхней поверхности первого и второго соединительных элементов 13 и 15 узла в сборе. В верхней части указанных элементов, в частности, выполнены выемки (на чертеже не видны), обеспечивающие установку крепежной планки 17 заподлицо с верхними поверхностями первого и второго соединительных элементов 13 и 15.
Устройство дополнительно может содержать закрепленное на корпусе несъемное оборудование с целью расширения круга оборудования, определяющего функциональную направленность устройства.
Так, в частности, устройство содержит (фиг. 1, 2, 3) закрепленный в задней части корпуса несъемный механический модуль, включающий сервопривод (на чертеже позицией не обозначен), диспенсер 19, предназначенный для размещения в нем шариков, имитирующих картофель, и расположенный под диспенсером 19 короб 20 с донной поворотной крышкой. Указанное дополнительное несъемное оборудование служит для имитации посадки картофеля.
Устройство также содержит расположенную поверх верхнего основания 1 крышку 21 (фиг. 3), в частности, выполненную из магнитного материала и скрепленную с верхним основанием 1 с помощью сил магнитного притяжения. Крышка 21 имеет выпуклую форму и установлена с обеспечением фиксации положения аккумуляторного блока 4 на верхнем основании 1
Устройство работает следующим образом.
Осуществляют структурную сборку робота, при этом выбирают сменное оборудование, обеспечивающее выполнение задания, имитирующего сельскохозяйственную деятельность на специальном полигоне.
В частности, закрепляют на держателе 12 сменный механический модуль 11, имитирующий ковш с крюком. Соединение механического модуля 11 с держателем 12 осуществляют с помощью универсального разъемного соединительного узла. При этом выступ 14 соединительного элемента 13 устанавливают в пазу 16 соединительного элемента 15. На верхней поверхности соединительного узла в сборе устанавливают планку 17 и закрепляют ее с помощью саморезов 18.
При необходимости осуществляют программирование робота, в частности, с помощью дистанционного пульта управления, обеспечивающее возможность осуществления сельскохозяйственной деятельности в соответствии с полученным заданием.
Приводят робот в движение и управляют его перемещением по полигону с помощью бортового контроллера 7 в соответствии с управляющими сигналами, поступающими в антенный блок 9, задаваемыми, в частности, с помощью дистанционного пульта управления.
В ходе осуществления задания робот, в частности, имитирует сгребание сена с помощью ковша и перенос стогов сена с помощью крюка. При этом перемещение механического модуля 11 и его отдельных конструктивных узлов (ковша и крюка) вверх и вниз осуществляется по управляющим сигналам бортового контроллера 7 с помощью соответствующих сервоприводов.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНЫЙ РЕКОНФИГУРИРУЕМЫЙ МОДУЛЬНЫЙ РОБОТ | 2022 |
|
RU2772503C1 |
| Составная внешняя накладка для настенного монтажа модульных электрических устройств | 2019 |
|
RU2774407C2 |
| КОМБИНАТОРНЫЙ ЗОНТ "АИФА" | 1993 |
|
RU2109473C1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| МОДУЛЬНЫЙ МАНИПУЛЯЦИОННЫЙ РОБОТ, ПРЕДНАЗНАЧЕННЫЙ ДЛЯ ИСПОЛЬЗОВАНИЯ В ОБРАЗОВАТЕЛЬНЫХ ЦЕЛЯХ | 2023 |
|
RU2806952C1 |
| ПЕРЕДВИЖНАЯ УСТАНОВКА ДЛЯ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 2005 |
|
RU2289150C1 |
| Способ исследования и оптимизации компоновки летательного аппарата и модель для его осуществления | 2020 |
|
RU2761543C1 |
| Устройство быстрой установки и снятия антенны | 2016 |
|
RU2614921C1 |
| Конструктор для сборки робота | 2019 |
|
RU2729473C1 |
| НАБОР ДЕТАЛЕЙ ДЛЯ ИНФОРМАЦИОННОГО СТЕНДА | 2008 |
|
RU2377946C1 |
Изобретение относится к области робототехники и может применяться в качестве конфигурируемого робота, предназначенного для обучения навыкам конструирования и исследования свойств и характеристик мобильных роботов, в частности, при выполнении работ, имитирующих сельскохозяйственную деятельность. Робот выполнен в виде самоходной платформы, содержит корпус, на котором смонтированы функциональные блоки робота, включающие источник питания, бортовой компьютер и колесную ходовую часть, сменное оборудование, смонтированное на корпусе и определяющее функциональную направленность робота. Робот содержит держатель для сменного оборудования, смонтированный на корпусе с возможностью поворота относительно поперечной оси робота, а сменное оборудование выполнено в виде механического модуля, соединенного с держателем с помощью разъемного соединительного узла, включающего первый соединительный элемент, имеющий выступ и скрепленный со сменным механическим модулем, и второй соединительный элемент, имеющий паз, ответный выступу и скрепленный с держателем. Соединительные элементы выполнены с возможностью размещения выступа в пазу с обеспечением взаимного соединения элементов. При этом соединительный узел содержит накладной пластинчатый элемент, установленный поверх соединительных элементов с обеспечением фиксации их взаимного положения. Использование изобретения позволяет расширить технологические возможности робота с упрощением монтажа сменного оборудования. 4 з.п. ф-лы, 4 ил.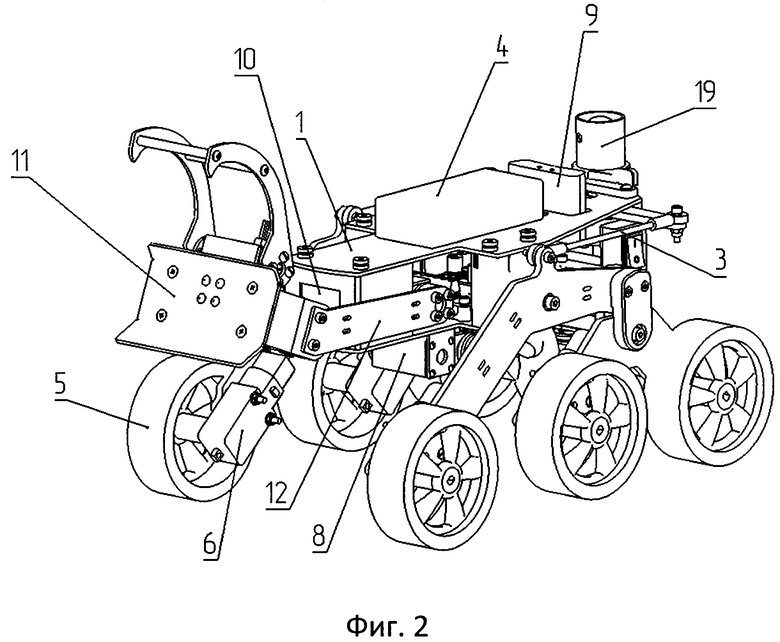
1. Конфигурируемый мобильный робот, выполненный в виде самоходной платформы, содержащий корпус, на котором смонтированы функциональные блоки робота, включающие источник питания, бортовой компьютер и колесную ходовую часть, сменное оборудование, установленное на корпусе в соответствии с функциональной направленностью робота, отличающийся тем, что он снабжен держателем для съемного оборудования, смонтированным на корпусе с возможностью поворота относительно поперечной оси робота, сменное оборудование выполнено в виде механического модуля, соединенного с держателем с помощью разъемного соединительного узла, включающего первый соединительный элемент, скрепленный со сменным механическим модулем и имеющий выступ, второй соединительный элемент, скрепленный с держателем и имеющий паз, ответный выступу, при этом первый и второй соединительные элементы выполнены с возможностью размещения указанного выступа в указанном пазу с обеспечением взаимного соединения указанных соединительных элементов, а соединительный узел имеет накладной пластинчатый элемент, установленный поверх первого и второго соединительных элементов с обеспечением фиксации взаимного положения указанных элементов соединительного узла в сборе, причем выступ первого соединительного элемента выполнен в виде тела, имеющего конусообразную форму, сужающуюся книзу, паз второй соединительной детали имеет форму, соответствующую форме выступа первой соединительной детали, а накладной пластинчатый элемент выполнен в виде V-образной крепежной пластины, закрепленной с помощью крепежных элементов на верхней поверхности первого и второго соединительных элементов узла в сборе, при этом в верхней части указанных элементов выполнены выемки, обеспечивающие установку указанной крепежной планки заподлицо с верхними поверхностями первого и второго соединительных элементов.
2. Робот по п. 1, отличающийся тем, что сменный механический модуль выполнен в виде модуля, имитирующего схват и включающего сервопривод и исполнительный механизм, выполненный в виде конструктивного узла, содержащего зажимные губки, обеспечивающие зажим захватываемых предметов.
3. Робот по п. 1, отличающийся тем, что сменный механический модуль выполнен в виде модуля, содержащего сервопривод и исполнительный механизм, включающий первый конструктивный узел, выполненный в виде горизонтально ориентированных и расположенных под углом друг к другу плоских панелей, имитирующих ковш, и смонтированный над первым конструктивным узлом второй конструктивный узел, имитирующий крюк.
4. Робот по п. 1, отличающийся тем, что сменный механический модуль выполнен в виде модуля, содержащего размещенный в корпусе электромагнит, выполненный с возможностью сбора объектов с магнитными свойствами.
5. Робот по п. 1, отличающийся тем, что сменный механический модуль выполнен в виде модуля, имитирующего подъемные вилы и содержащего сервопривод и исполнительный механизм, выполненный в виде конструктивного узла, включающего основание с двумя плоскими продольно ориентированными планками, закрепленными на его боковых сторонах.
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС УСТРОЙСТВ ДЛЯ УХОДА ЗА ПЛАНТАЦИЕЙ РАСТЕНИЙ И СПОСОБ УХОДА ЗА ПЛАНТАЦИЕЙ РАСТЕНИЙ | 2011 |
|
RU2477037C2 |
| СПОСОБ АГРЕГАТИРОВАНИЯ НАБОРА СМЕНЯЕМЫХ МОДУЛЕЙ-АДАПТЕРОВ И БЛОКОВ ИЗ НИХ С ЭНЕРГОСРЕДСТВОМ ДЛЯ ВЫПОЛНЕНИЯ МЕХАНИЗИРОВАННЫХ РАБОТ ПРИ ПРОИЗВОДСТВЕ СЕЛЬСКОХОЗЯЙСТВЕННОЙ ПРОДУКЦИИ И СРЕДСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2431954C2 |
| ТЯГОВО-СЦЕПНОЕ УСТРОЙСТВО АВТОПОЕЗДА | 2008 |
|
RU2363596C1 |
| US 2005015189 A1, 20.01.2005 | |||
| US 2012197495 A1, 02.08.2012. | |||

