Изобретение относится к подвижным перегородкам и может быть использовано для зонирования и разделения различных помещений, для ограждения проемов в помещениях и т.п.
Из уровня техники широко известны различного вида перегородки-ширмы, в том числе имеющие колеса для перемещения по полу в помещении. Такие небольшие портативные перегородки-ширмы в основном являются элементами интерьера и предназначены для отделения помещения, например, на два не вполне изолированных пространства. Такие перегородки-ширмы являются неустойчивыми, неспособны полноценно осуществить зонирование помещений и перемещаются только с использованием ручного труда.
Также из уровня техники известны различные перегородки, предназначенные для зонирования помещений. Так, например, известны перегородки, включающие базовую опору из прокатного профиля с закрепленным на ней полотном перегородки (см., например, Патенты RU 2495983, опубликован 20.10.2013, RU 152443, опубликован 27.05.2015).
Недостатком таких перегородок является то, что они являются стационарными перегородками, монтируются непосредственно в помещении в определенной зоне, и не способны оперативно дистанционно перемещаться без осуществления монтажно-демонтажных работ.
Из уровня техники известна подвижная перегородка-стена, которая подвижно подвешена на подвесном пути с помощью опорного элемента сердечника с возможностью разъема (см. US 2015033642 А1 от 05.02.2015).
Недостатком такой перегородки является отсутствие возможности дистанционного зонирования помещений, перемещение перегородки только по определенной траектории, которая определяется стационарно установленными подвесными путями.
Наиболее близким решением к предложенной перегородки является раздвижная перегородка, состоящая из горизонтально-подвижной панели, выполненной с возможностью перемещения по верхнему рельсу, при этом панель состоит из двух полотен, между которыми помещен звукопоглощающий материал (см. Патент RU 201647, опубликован 24.12.2020).
Недостатком наиболее близкого решения является отсутствие возможности дистанционного зонирования помещений, перемещение перегородки осуществляется только по определенной траектории, которая определяется стационарно установленным верхним рельсом.
Технической проблемой, решаемой изобретением, является создание роботизированной подвижной перегородки (стены) с дистанционным управлением, позволяющей осуществлять надежное и устойчивое временное или постоянное разделение площадей помещений различного назначения в автоматическом режиме, исходя из текущих эксплуатационных нужд.
Техническим результатом изобретения является обеспечение возможности надежного автоматического дистанционного зонирования помещений без ручного труда и без привлечения строительных, монтажных и прочих работ по перепланировке.
Технический результат изобретения достигается благодаря тому, что подвижная перегородка содержит платформу с колесами, установленный на платформе каркас с закрепленными на нем панелями, и систему управления, каждое колесо соединено с соответствующим приводом колеса, а каждый привод колеса связан с системой управления с возможностью вращения в двух направлениях, при этом каждый привод колеса и система управления связаны с источником питания.
Кроме того, каждое колесо может представлять собой колесо Илона, при этом оси всех колес могут быть параллельны друг другу.
В верхней части каркаса может быть установлена по меньшей мере одна подвижная в вертикальном направлении распорка, соединенная с приводом распорки, который может быть связан с системой управления и с источником питания.
Кроме того, система управления может включать блок управления, процессор, программный модуль, модуль беспроводной связи, драйверы приводов, модуль источника питания, датчики движения и ориентации в пространстве и их модули.
Кроме того, центр тяжести перегородки расположен, преимущественно, в нижней части каркаса.
Кроме того, система управления может быть расположена в диэлектрическом корпусе, установленном внутри каркаса между панелями.
Кроме того, панели могут быть выполнены съемными.
Кроме того, внутри каркаса между панелями может быть установлен тепло- и/или звукоизоляционный материал.
Кроме того, источник питания может быть выполнен проводным или в виде аккумуляторной батареи с возможностью беспроводной зарядки.
Кроме того, по меньшей мере одно колесо может быть соединено со своим приводом посредством редуктора.
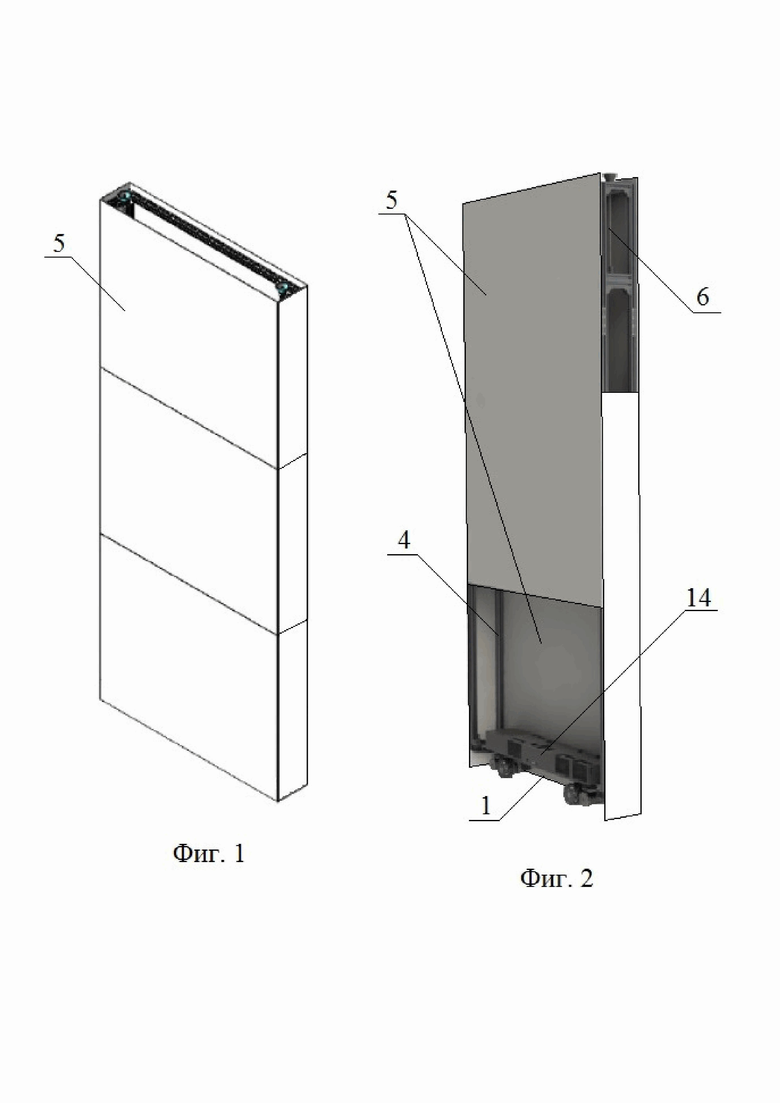
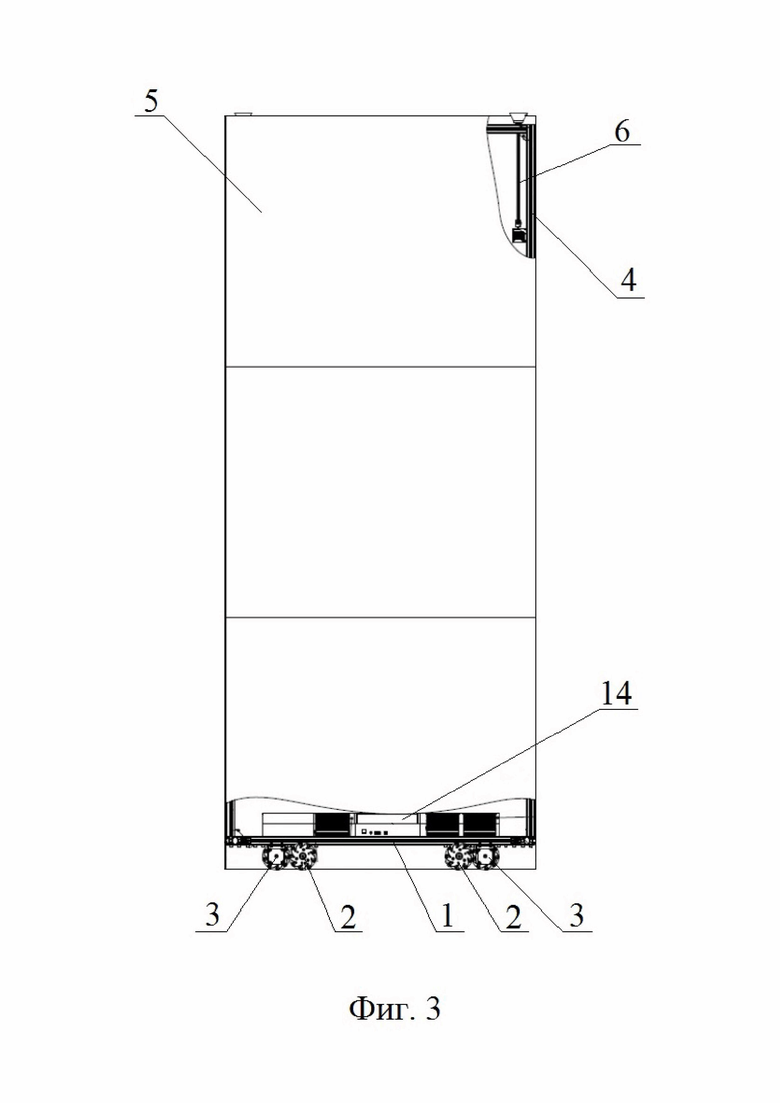
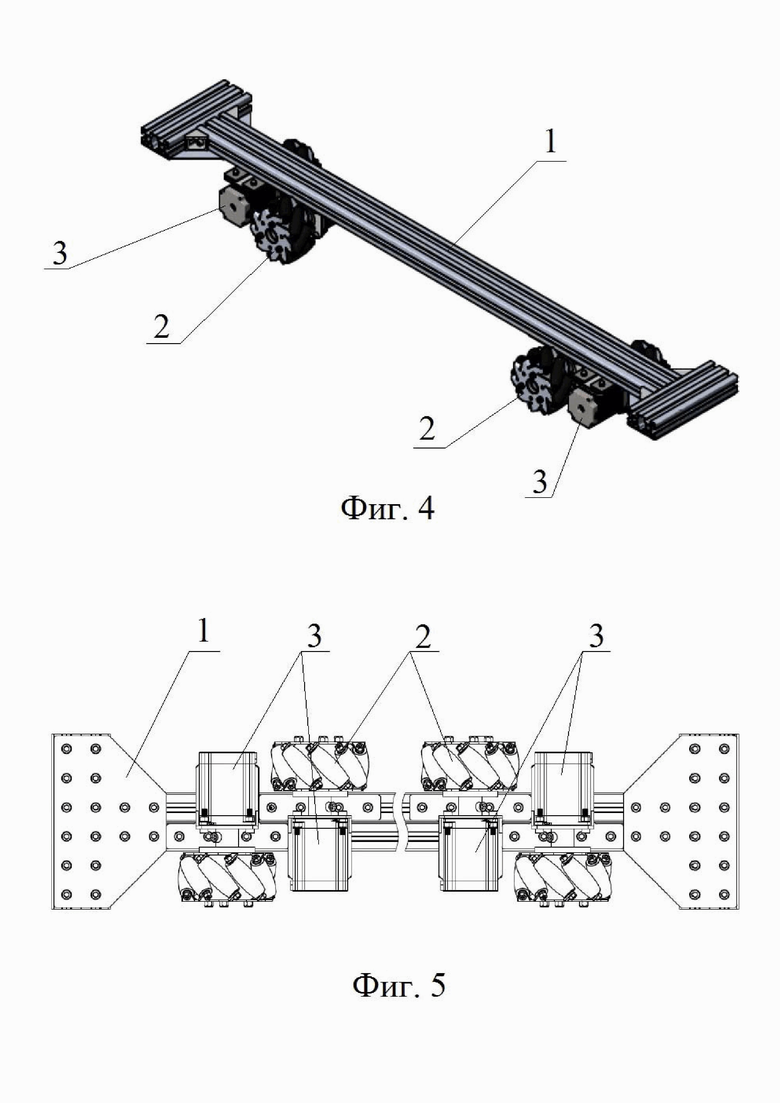
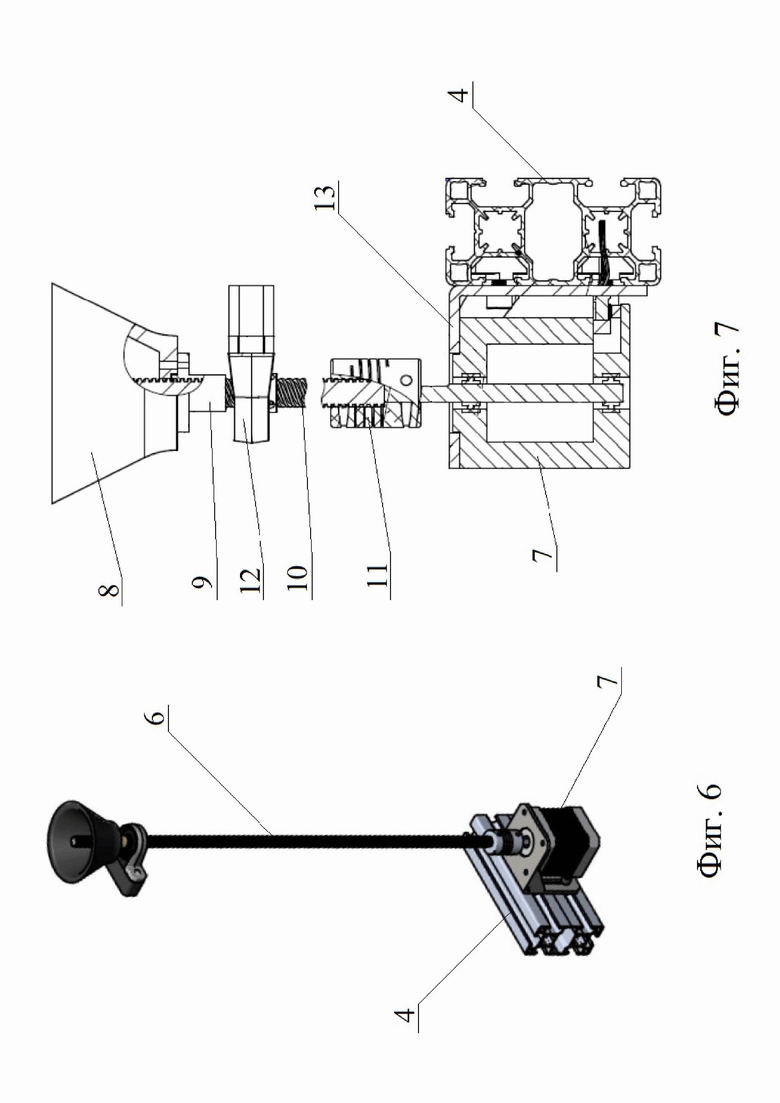
Изобретение поясняется чертежами, где на фиг. 1 показан общий вид предложенной перегородки; на фиг. 2 и 3 – то же с отображением платформы с колесами и механизма фиксации; на фиг. 4 показана подвижная платформа перегородки; на фиг. 5 – то же, вид снизу; на фиг. 6 показан общий вид механизма фиксации перегородки; на фиг. 7 показаны составляющие части механизма фиксации перегородки; на фиг. 8 показан диэлектрический корпус системы управления перегородки.
Предложенная перегородка является автономной роботизированной подвижной перегородкой (мобильной стеной), имеющей дистанционное управление. Предложенная мобильная перегородка позволяет в автоматическом режиме с помощью дистанционного пульта управления, либо в соответствии с заранее запрограммированным алгоритмом, исходя из текущих эксплуатационных нужд, осуществлять всенаправленное зонирование и разделение помещений различного назначения, а также ограждать различные проемы в помещениях.
Предложенная перегородка содержит подвижную (всенаправленную) платформу 1 с колесами 2. Каждое колесо 2 представляет собой роликонесущее колесо Илона, которое соединено со своим индивидуальным приводом 3 (колесная база «Omni – Wheels» или также известная как «Mecanum wheels» – основание). При этом колеса 2 с приводами 3 (электрическими двигателями) установлены с нижней стороны платформы 1 так, что оси колес 2, преимущественно, параллельны друг другу. Такое расположение колес позволяет уменьшить толщину перегородки, ее вес и занимаемое пространство в помещении. Однако возможен вариант расположения колес 2 так, что оси одной пары колес 2 соосны, и оси другой пары колес 2 также соосны. Кроме того, в вариантном выполнении изобретения возможно использование обычных колес, каждое из которых соединено либо со своим индивидуальным приводом, либо соединены с общим приводом (например, два колеса связаны с одним приводом, а другие два колеса – с другим приводом).
В вариантном исполнении одно из колес 2, или часть колес 2, или все колеса 2 могут быть соединены каждый со своим приводом 3 через соответствующий редуктор (не показан), т.е. может быть применена схема передачи вращательного момента от двигателей 3 к колесам 2 через редукторы для уменьшения габаритного размера перегородки, повышения устойчивости конструкции и уменьшения энергопотребления.
На платформе 1 установлен несущий каркас 4 (каркас 4 может быть жестко соединен с платформой 1 или с возможностью съема). На каркасе 4 закреплены облицовочные быстросъемные панели 5. Каркас 4 с панелями 5 образует перегородку, в которой (между панелями 5) могут быть размещены различные наполнители. Наполнение каркаса 4 между панелями 5 осуществляется, преимущественно, исходя из соображений строительных норм звукоизоляции, теплоизоляции, а также исходя из оптимального баланса массы по высоте конструкции для повышения устойчивости. В конструкции каркаса 4 с панелями 5 предложенной мобильной перегородки также заложена возможность ее применения для прочих целей, например, в качестве мультимедийного комплекса. Облицовочные сменные панели 5 помимо функции разделения пространства (функции перегородки, стены) также могут носить декоративный и визуальный характер, могут иметь различные встроенные светильники (подсветки), кронштейны для навешивания полок, либо могут иметь углубления, образующие полки и т.п. В качестве облицовочных панелей 5 (плит) могут быть использованы различные материалы (например, листы цветных металлов, оргалита, гипсокартона, МДФ, а также любые иные материалы). При этом панели 5 имеют специальные быстросъемные крепления (не показаны), позволяющие фиксировать панели 5 на каркасе 4. Каркасная сменная панель-перегородка служит непосредственно для разграничения пространства жилого (или нежилого) помещения, и по высоте исполняется исходя из характерного расстояния от пола до потолка.
Все основные несущие и прочие элементы каркаса 4 выполнены, преимущественно, из конструкционного профиля квадратного сечения (например, 30 мм) и центральным пазом «ласточкин хвост».
Преимущественно, с боковых сторон перегородки в верхней части каркаса 4 установлены фиксирующие механизмы, каждый из которых представляет собой подвижную в вертикальном направлении распорку 6, соединенную с приводом 7 распорки. Количество фиксирующих механизмов может быть от одного и более, однако, оптимальным является наличие двух распорок 6 со своими индивидуальными приводами 7, которые расположены с противоположных боковых сторон перегородки (возможен вариант использования общего привода 7 для распорок 6).
Распорка 6 может включать в себя фиксирующую насадку 8, соединенную, например, с трапецеидальной гайкой 9, установленной, например, на трапецеидальном (однозаходном) винте 10, который соединен с приводом 7, например, через соединительную муфту 11, обеспечивающую податливость механизма фиксации. При этом винт 6 для уменьшения консольных нагрузок может иметь дополнительную опору 12, прикрепленную к каркасу 4. Привод 7 закреплен на каркасе 4, например, с помощью кронштейна 13.
За счет совершения вращательного движения винтом 10 в результате воздействия на него крутящего момента, создаваемого приводом 7 (шаговым двигателем), гайка 9 осуществляет свободное поступательное перемещение вдоль винта 10, перемещая фиксирующую насадку 8. В результате вырождается зазор между фиксирующей насадкой 8 и потолком. Синхронная работа двух механизмов фиксации обеспечивает надежное крепление подвижной перегородки «враспор».
В вариантном выполнении изобретения фиксирующий механизм может иметь и иное исполнение, например, он может иметь гидравлический или пневматический привод (гидро или пневмо- цилиндры), а также иметь сферический наконечник и амортизатор для повышения устойчивости перегородки во время движения.
Таким образом, применение распорных механизмов фиксации существенно повышает устойчивость предложенной перегородки в покое, за счет позиционирования конструкции «враспор». Кроме того, для повышения устойчивости предложенной перегородки в движении ее центр тяжести расположен в нижней части каркаса 4, т.е. смещен ближе к платформе 1.
Предложенная перегородка имеет систему управления, которая может включать блок управления, процессор, программный модуль, модуль беспроводной связи, драйверы управления (механизации и фиксации), плату управления, драйверы индикационной подсветки, макетную плату, преобразователь тока, модуль источника питания (модуль аккумуляторной батареи), датчики движения и ориентации в пространстве, модули датчиков движения и ориентации в пространстве и т.п.
Драйверы управления (драйверы электрических двигателей – приводов 3) предназначены для передачи управляющего сигнала от платы управления, а также для передачи энергии от электрических колодок (не показаны) для функционирования приводов 3. Также драйверы управления предназначены для передачи управляющего сигнала от платы управления на приводы 7 распорок 6. Драйвер индикационной подсветки предназначен для регулирования свечения диодной подсветки в зависимости от режима работы подвижной перегородки. Датчик, расположенный на макетной плате, принимает сигналы управления от дистанционного пульта в инфракрасном диапазоне и передает их на плату управления. Настройка драйверов управления позволяет изменять частоту вращения вала каждого привода 3, а также момент, создаваемый на валу привода 3.
Все компоненты системы управления (т.е. вся электроника и электрика) расположены в диэлектрическом корпусе 14, который установлен внутри каркаса 4 между панелями 5. Корпус 14 может быть единым для всех компонентов систему управления, либо может быть несколько корпусов для соответствующих компонентов системы управления. Корпус 14 с электроникой может быть установлен на платформе 1, либо закреплен в нижней части перегородки на каркасе 4. Корпус 14 предназначен для надежной фиксации всех компонентов микроэлектроники, изолирования токов, удобства сервисного облуживания, безопасности эксплуатации.
Каждый привод 3 каждого колеса 2 и каждый привод 7 каждой распорки 6 связан с системой управления с возможностью независимого управления приводами 3, 7 и их вращения в двух (противоположных) направлениях. Также с системой управления связаны подсветки, мультимедийный комплекс и т.п. в случае их наличия.
Каждый привод 3, каждый привод 7, а также компоненты системы управления связаны с источником питания (не показан). При этом источник питания может быть автономным и установленным внутри каркаса 4 между панелями 5 (батарейки, аккумуляторы с возможностью беспроводной зарядки), либо питание всех плат (компонентов системы управления) и двигателей 3, 7 может осуществляться через сетевой кабель и блок питания (возможно питание от стационарной розетки в помещении с понижением напряжения входного переменного тока).
Работает перегородка следующим образом.
Установленная в помещении перегородка для зонирования, разделения помещения управляется с помощью пульта управления, в качестве которого может быть использован дистанционный пульт с ИК излучением, либо смартфон, планшет и т.п. со специальным программным обеспечением, позволяющим управлять всеми системами перегородки. В случае необходимости перемещения перегородки сигнал от пульта управления поступает в систему управления, которая подает сигналы через драйверы управления на приводы 3 колес 2, а также на приводы 7 распорок 6 при фиксации перегородки в необходимом положении. Кроме того, перегородка может перемещаться в помещении по заранее заданному алгоритму, который запрограммирован в системе управления в соответствии с эксплуатационными задачами. Т.е., например, в одно время перегородка находится в одной зоне помещения, в другое время по заранее заданному алгоритму она самостоятельно перемещается в другую зону помещения и так далее.
Механизированная всенаправленная платформа 1 с шаговыми мотор-колесами 2 имеет три степени свободы и может перемещаться в плоскости пола в любом направлении, в том числе вокруг своей оси. Система управления позволяет перемещать перегородку в любом направлении за счет изменения направления вращения валов приводов 3.
Вариации в перемещениях достигаются посредством поочередного или переменного включения и блокирования колесных пар. За счет драйверов управления каждый привод 3 управляется отдельно и независимо. Синхронная работа всех приводов 3 и приводов 7 осуществляется через управляющую плату. Поочередное блокирование колесных пар позволяет реализовать вращение колесной базы вокруг собственной оси, линейные и диагональные перемещения. Путем изменения направления и скорости вращения отдельных колес 2, можно добиться перемещения подвижной платформы 1 по любой дуге, при этом трения скольжения между роликами и опорной поверхностью практически отсутствует.
При установке перегородки (как с помощью пульта управления, так и в автоматическом режиме) в помещении в необходимое положение система управления подает сигнал на приводы 7 (с помощью пульта управления, либо в автоматическом режиме) и распорки 6 перемещаются в сторону потолка, упираясь фиксирующей насадкой 8 в потолок, обеспечивая надежную фиксацию перегородки.
В случае необходимости перемещения перегородки в другую зону помещения, с помощью пульта управления (или автоматическом режиме) система управления подает сигнал на приводы 7 распорок 6, в результате чего фиксирующие элементы 8 уходят их контакта с потолком, перегородка освобождается от фиксированного положения, и с помощью колес 2 перегородка перемещается на платформе 1 в другую зону помещения, где она также фиксируется с помощью распорок 6.
Благодаря такому выполнению мобильной, автономной и программируемой перегородки обеспечивается быстрое и удобное зонирование типового мало- и средне- размерного объекта гражданского строительства. За счет применения предложенной перегородки существенно повышается потенциал применения площадей и функциональность малоразмерных квартир типовой застройки.
Специальные роликонесущие колеса 2 позволяют платформе 1 двигаться в любом направлении в плоскости пола, обеспечивая три степени свободы. Использование платформы 1 с колесами 2, на которой закреплен каркас 4 с панелями 5 позволяет осуществлять временное или постоянное разделение площадей помещений, исходя из текущих потребностей, без привлечения строительных, монтажных и прочих работ по перепланировке.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УЛУЧШЕНИЯ КАЧЕСТВА КУРЕНИЯ КАЛЬЯНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2673143C1 |
| АВТОМАТИЧЕСКАЯ РАЗДВИЖНАЯ ПЕРЕГОРОДКА | 2023 |
|
RU2807052C1 |
| Автоматизированный дистанционно управляемый подъемный крюк | 2023 |
|
RU2809751C1 |
| ИНТЕЛЛЕКТУАЛЬНОЕ УСТРОЙСТВО ДЛЯ ПРОДВИЖЕНИЯ ТОВАРОВ НА ПОЛКЕ | 2020 |
|
RU2773863C1 |
| КОМПЛЕКС АВТОМАТИЧЕСКОЙ БОНИТИРОВКИ И ПЕРЕВЕСКИ ПТИЦЫ МЯСНЫХ И ЯИЧНЫХ ПОРОД "АГРОБИТ В" | 2023 |
|
RU2816483C1 |
| КОЛЕСО ОБОЗРЕНИЯ И ЕГО УЗЛЫ | 2001 |
|
RU2207895C1 |
| УСТРОЙСТВО ДЛЯ ФИЗИЧЕСКИХ УПРАЖНЕНИЙ И СПОСОБ ЕГО ИСПОЛЬЗОВАНИЯ | 2019 |
|
RU2772199C1 |
| Мехатронный модуль для поворота рулевого вала транспортно-технологического средства | 2022 |
|
RU2796264C1 |
| АППАРАТНО-ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ МОНИТОРИНГА ЖИЗНЕННЫХ ПОКАЗАТЕЛЕЙ | 2019 |
|
RU2729430C1 |
| МОДУЛЬ СВЕТОДИОДНОЙ ПОДСВЕТКИ И ЖИДКОКРИСТАЛЛИЧЕСКИЙ ДИСПЛЕЙ | 2007 |
|
RU2428623C2 |

Изобретение относится к подвижным перегородкам и может быть использовано для зонирования и разделения различных помещений, для ограждения проемов в помещениях и т.п. Подвижная перегородка содержит платформу 1 с колесами 2, установленный на платформе 1 каркас 4 с закрепленными на нем панелями 5 и систему управления. Каждое колесо 2 соединено с соответствующим приводом 3 колеса, а каждый привод 3 колеса связан с системой управления с возможностью вращения в двух направлениях, при этом каждый привод 3 колеса и система управления связаны с источником питания. Каждое колесо представляет собой колесо Илона, а оси всех колес параллельны друг другу. Техническим результатом изобретения является обеспечение возможности надежного автоматического дистанционного зонирования помещений без ручного труда и без привлечения строительных, монтажных и прочих работ по перепланировке. 8 з.п. ф-лы, 8 ил.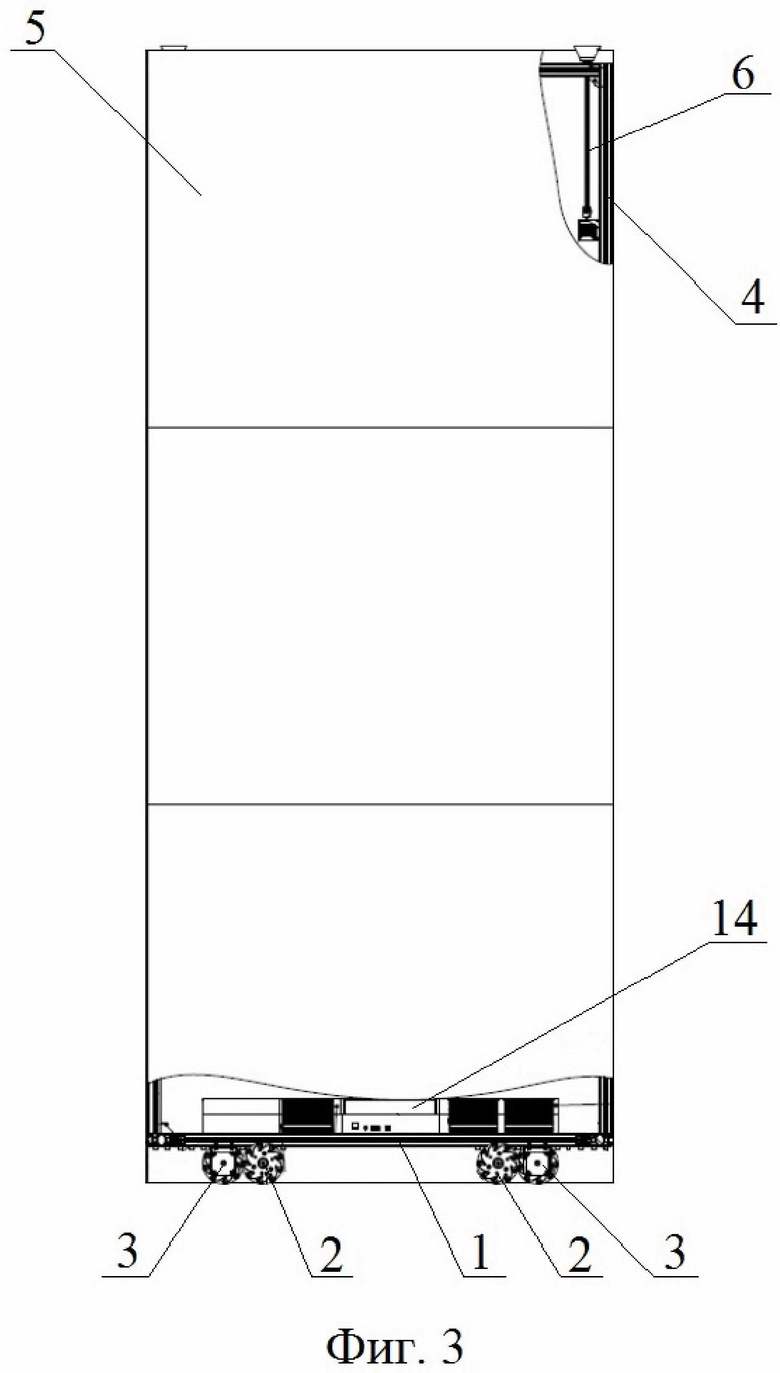
1. Подвижная перегородка, содержащая платформу с колесами, установленный на платформе каркас с закрепленными на нем панелями и систему управления, каждое колесо представляет собой колесо Илона и соединено с соответствующим приводом колеса, а каждый привод колеса связан с системой управления с возможностью вращения в двух направлениях, при этом каждый привод колеса и система управления связаны с источником питания, а оси всех колес параллельны друг другу.
2. Перегородка по п.1, в которой в верхней части каркаса установлена по меньшей мере одна подвижная в вертикальном направлении распорка, соединенная с приводом распорки, который связан с системой управления и с источником питания.
3. Перегородка по п.1, в которой система управления включает блок управления, процессор, программный модуль, модуль беспроводной связи, драйверы приводов, модуль источника питания, датчики движения и ориентации в пространстве и их модули.
4. Перегородка по п.1, в которой центр ее тяжести расположен в нижней части каркаса.
5. Перегородка по п.1, в которой система управления расположена в диэлектрическом корпусе, установленном внутри каркаса между панелями.
6. Перегородка по п.1, в которой панели выполнены съемными.
7. Перегородка по п.1, в которой внутри каркаса между панелями установлен тепло- и/или звукоизоляционный материал.
8. Перегородка по п.1, в которой источник питания выполнен проводным или в виде аккумуляторной батареи с возможностью беспроводной зарядки.
9. Перегородка по п.1, в которой по меньшей мере одно колесо соединено со своим приводом посредством редуктора.
| ШИХТА ДЛЯ ИЗГОТОВЛЕНИЯ ОГНЕУПОРОВ | 2006 |
|
RU2332386C2 |
| US 2005183896 A1, 25.08.2005 | |||
| DE 102013103042 A1, 02.10.2014 | |||
| WO 2020074953 A2, 16.04.2020 | |||
| AU 2015353569 A1, 25.05.2017 | |||
| JP 4942781 B2, 30.05.2012 | |||
| US 20210180811 A1, 17.06.2021 | |||
| ПЕРЕДВИЖНОЙ СТЕНОВОЙ ЭЛЕМЕНТ И ПЕРЕДВИЖНАЯ СТЕНОВАЯ СИСТЕМА | 2017 |
|
RU2732903C2 |
| Панель сборно-разборной перегородки | 1982 |
|
SU1065563A1 |
| DE 202019102172 U1, 06.06.2019 | |||
| US 20200247201 A1, 06.08.2020 | |||
| JP 2016199864 A, | |||

