Изобретение относится к области робототехники, в частности к адаптивному электромеханическому захватному устройству для промышленных и коллаборативных роботов.
Уровень техники
Из уровня техники известен универсальный адаптивный захват OnRobot 3FG15, который представляет собой трехпальцевое захватное устройство с электромеханическими захватами, в которых электропривод и кинематическая часть (подвижные пальцы) объединены, т.е. 1 электропривод - 1 кинематическая схема (см. https://onrobot.com/en/products/3fgl5-three-finger-gripper).
Недостатками данного изделия является отсутствие возможности смены захвата, поскольку используется 1 электропривод - 1 кинематическая схема и, если будет нужна другая кинематическая схема - нужен другой захват.
Из уровня техники также известен универсальный адаптивный захват Robotiq 2f-140, который представляет собой двухпальцевое захватное устройство с электромеханическими захватами, в которых электропривод и кинематическая часть (подвижные пальцы) объединены, т.е. 1 электропривод - 1 кинематическая схема (см. https://robotiq.com/products/2f85-140-adaptive-robot-gripper).
Недостатками данного изделия является отсутствие возможности смены захвата, поскольку используется 1 электропривод - 1 кинематическая схема и, если будет нужна другая кинематическая схема - нужен другой захват.
Раскрытие изобретения
Техническим результатом заявленного изобретения является создание адаптивного электромеханического захватного устройство для промышленных и коллаборативных роботов модульной конструкции, что позволяет менять схемы захвата, т.е. если нужна другая кинематическая схема, меняется только модуль кинематики, а привод остается.
Вышеуказанный технический результат достигается адаптивным электромеханическим захватным устройством для промышленных и коллаборативных роботов, представляющим собой центральный модуль адаптивного захватного устройства, состоящий из мотор-редуктора, корпуса с установленным внутри тормозным соленоидом, входящим в зацепление с тормозным диском, на котором установлен постоянный диаметрально поляризованный магнит платы с управляющей электроникой, расположенной в основании корпуса на центрирующем кольце и винтов, соединяющих корпус и мотор-редуктор, фланца-адаптера для соединения с центральным модулем захвата для сборки с роботом и разъемом для подключения интерфейсного кабеля, при этом центральный модуль адаптивного захватного устройства служит для генерации движения и закрепления сменных кинематических модулей двухпальцевого и трехпальцевого исполнения посредством зацепления мотор-редуктора с кинематическим модулем через быстроразъемную муфту.
При сборке с роботом центральный модуль монтируется на фланец-адаптер и закрепляется при помощи винтов.
Корпуса кинематических модулей и центрального модуля захвата выполнены из металла и покрыты антистатическим лаком.
Краткое описание чертежей
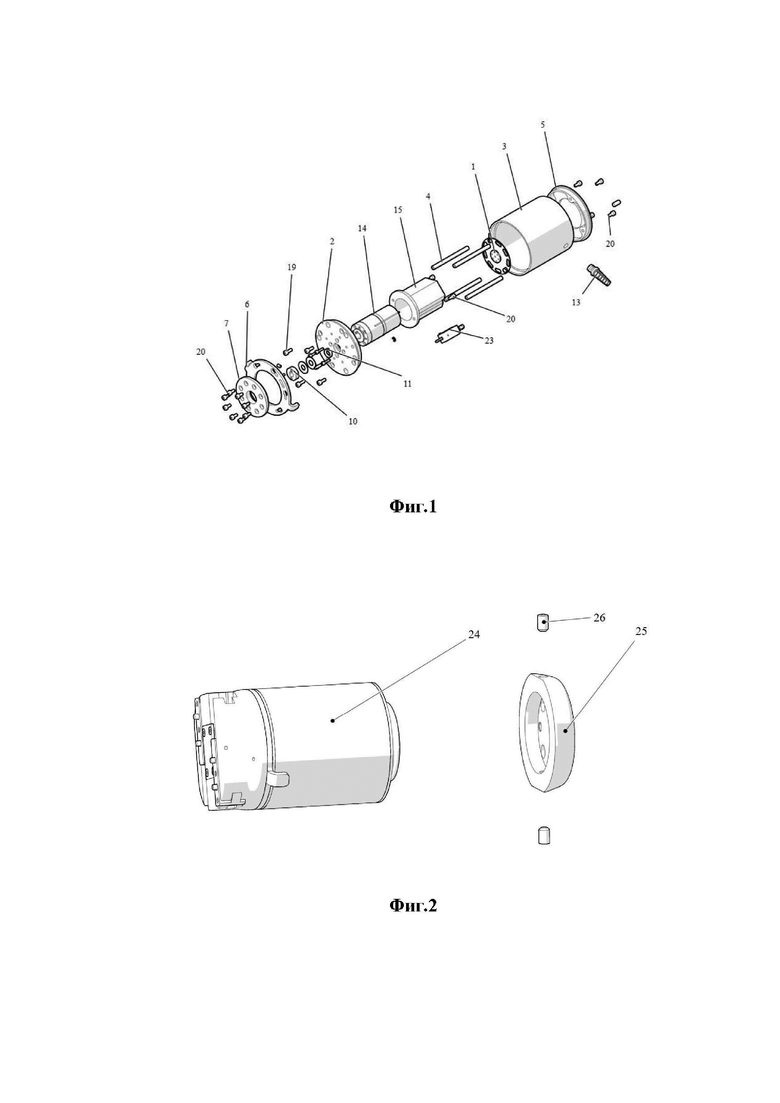
На фиг. 1 показана модель сборки центрального модуля адаптивного захватного устройства.
На фиг. 2 показана модель сборки центрального модуля адаптивного захватного устройства с фланцем-адаптером.
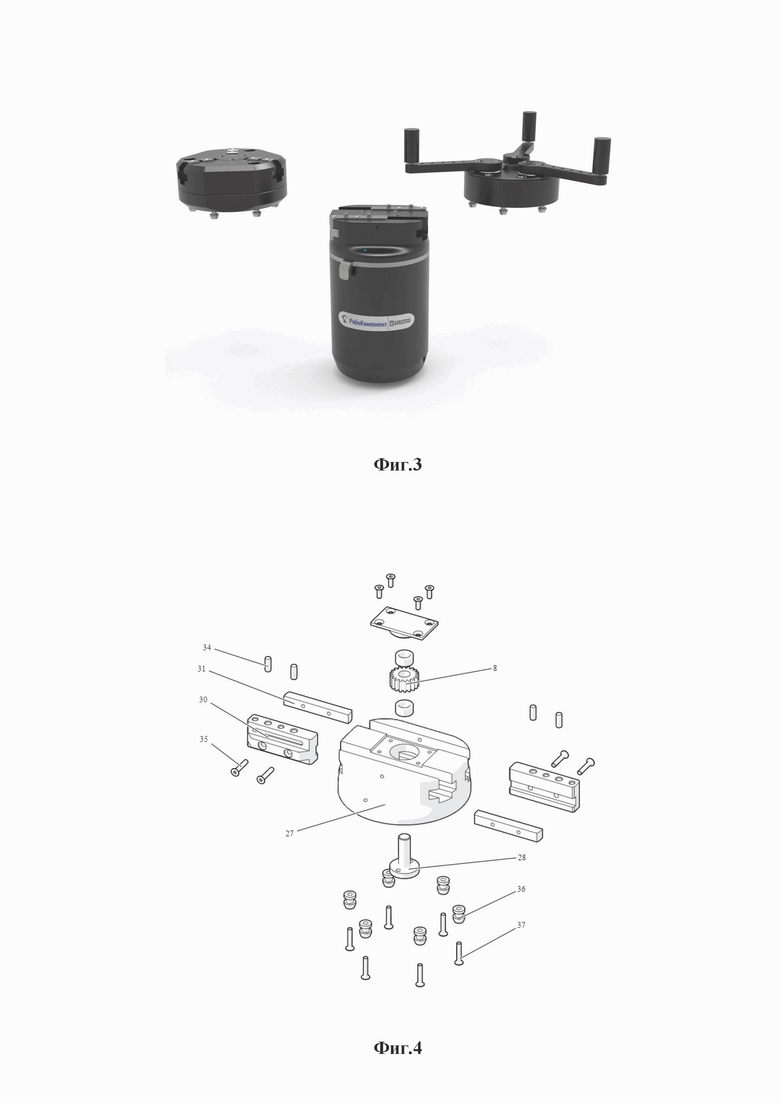
На фиг. 3 показан образец адаптивного электромеханического захватного устройства для промышленных и коллаборативных роботов в сборе.
На фиг. 4 показана модель сборки двухпальцевого кинематического модуля адаптивного захватного устройства.
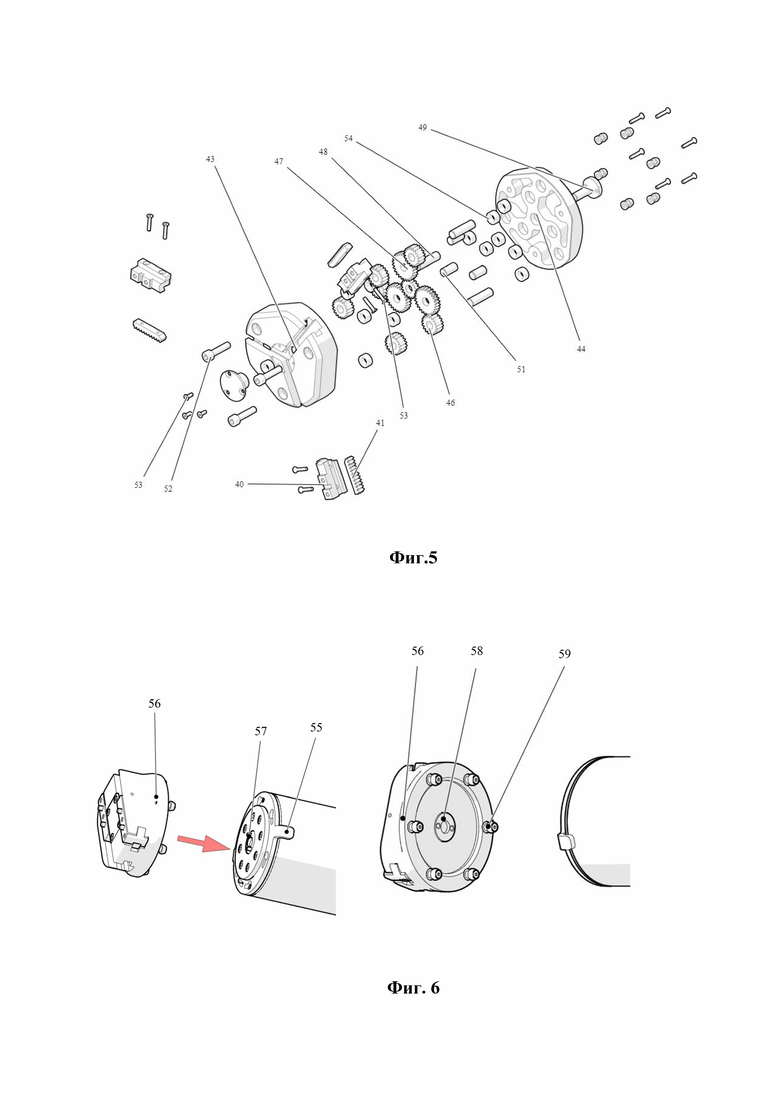
На фиг. 5 показана модель сборки трехпальцевого кинематического модуля адаптивного захватного устройства.
На фиг. 6 показан монтаж двухпальцевого параллельного модуля.
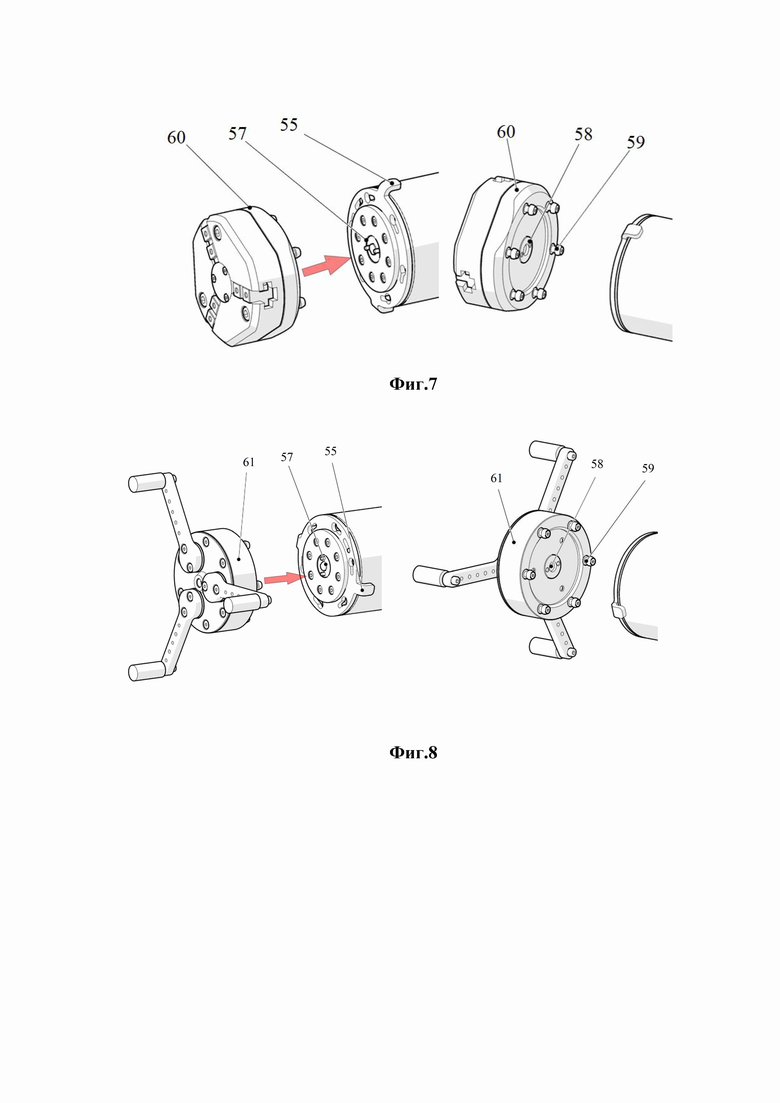
На фиг. 7 показан монтаж трехпальцевого линейного модуля.
На фиг. 8 показан монтаж трехпальцевого ангулярного модуля.
Осуществление изобретения
Адаптивное электромеханическое захватное устройство для промышленных и коллаборативных роботов содержит центральный модуль захвата, который состоит из мотор-редуктора 14, корпуса 3 с крышками 2 и 5, соединенными проставками 4, которые стянуты винтами 19 и 20 и разъема 13 для подключения интерфейсного кабеля. Внутри корпуса установлен тормозной соленоид 23, входящим в зацепление с тормозным диском 1, на котором установлен постоянный диаметрально поляризованный магнит; платы с управляющей электроникой 15, расположенной в крышке корпуса 2 и винтов 11 соединяющих корпус и мотор-редуктор. На крышке 2 корпуса модуля с помощью фланца 7 прижимается пластина 6 быстрой смены кинематики. На валу мотор-редуктора расположена полумуфта 10.
Центральный модуль служит для генерации движения и закрепления сменных кинематических модулей адаптивного захватного устройства. Основное пространство модуля занимает мотор-редуктор и два тормозных соленоида, расположенных вдоль его оси. В нормальном состоянии вал мотора заблокирован штоками соленоидов 23, входящими в зацепление с тормозным диском 1. При начале движения управляющая плата подает напряжение на тормозные соленоиды 23, штоки втягиваются и освобождают тормозной диск 1. Вращение диска 1 вызывает поворот магнита, положение полюсов которого отслеживают биполярные датчики Холла, установленные на управляющей плате 15.
При сборке с роботом фланец адаптер 25 сначала крепится на последнее звено роботов при помощи винтов и центрируется с помощью штифта. Затем на установленный фланец монтируется центральный модуль 24 и закрепляется при помощи установочных винтов 26.
Двухпальцевый модуль адаптивного захватного устройства состоит из корпуса 27, содержащего профильные пазы под направляющие губок захвата двух зубчатых реек 31, скрепленных с направляющими 30, винтов 35, осуществляющих крепление зубчатых реек к направляющим, штифтов 34, предназначенных для центрирования сменных губок захватного устройства и винтов 37, осуществляющих крепление зацепов для быстрой смены кинематики 36.
Модуль двухпальцевого исполнения содержит полумуфту 28 с шестерней 32. Полумуфта соединяется с ответной частью на центральном модуле и передает вращение на шестерню. Вращение центральной шестерни приводит к поступательному перемещению реек и связанных с ними через направляющие 30 губок захватного устройства.
При первичной инициализации модуля после установки управляющий микроконтроллер готов к работе, поскольку до этого направляющие 30 были зафиксированы механически с помощью установочных винтов. После этого информация о положении губок контролируется инкрементальным датчиком положения.
Трехпальцевый модуль адаптивного захватного устройства состоит из двухэлементного корпуса, включающего верхнюю 43 и нижнюю 44 части; трех ведомых шестерен 46, расположенных по окружности под углом 120 градусов; трех промежуточных шестерен 47; втулок 54, образующих подшипник скольжения с валом 48 и 51; зубчатых реек 41, скрепленных с направляющими 40. Крепление губок и элементов корпуса адаптивного захватного устройства осуществляется винтами 52 и 53.
При установке модуля трехпальцевого модуля на центральный модуль его полумуфта входит в зацепление с полумуфтой 49 модуля. Поворот шестерни 46 через ведомую шестерню 47 вызывает поступательное перемещение реек 41. Движение реек 41 приводит к открытию/закрытию губок трехпальцевого модуля адаптивного захватного устройства.
Монтаж двухпальцевого параллельного модуля, трехпальцевого линейного модуля и трехпальцевого ангулярного модуля происходит следующим образом.
Сводят кулачки двухпальцевого модуля 56, трехпальцевого линейного модуля 60 или трехпальцевого ангулярного модуля 61 в сомкнутое положение до щелчка. Проворачивают прижимную пластину 55 так, чтобы открылись 8 мм отверстия. Ориентируют модуль 56 таким образом, чтобы штифты полумуфты основного модуля 57 попадали в отверстия полумуфты 58. Соединяют модули до упора, чтобы ножки 59 вошли в отверстия 8 мм на основном модуле. Поворачивают прижимную пластину 55, чтобы зажать ножки 59. Проверяют надежность закрепления двухпальцевого модуля.
Для электрического подключения захватного устройства к блоку управления робота используется разъем М8 на 8 контактов.
Для настройки режимов работы захвата при помощи коммуникационного модуля и ПО RoboComponent Gripper GUI подключают захват к коммуникационному модулю. Коммуникационный модуль подключают к ПК с установленным ПО RoboComponent Gripper GUI. Включают питание на коммуникационном модуле. Запускают ПО RoboComponent Gripper GUI, предварительно убедившись в наличии связи с захватом. Задают требуемые значения положения, усилия и скорости захвата, для каждого из четырех режимов работы. Для проверки правильности значений режима, произведите проверку, при помощи специальной кнопки «Проверить».
При первом включении захвата необходимо выполнить инициализацию. При инициализации захвата выполняется перемещение пальцев от крайнего закрытого положения до крайнего открытого.
Для того чтобы произвести инициализацию, необходимо кратковременно подать 24 В на цифровой вход захвата DI1.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибкая производственная система | 1989 |
|
SU1673397A1 |
| Захватное устройство | 1986 |
|
SU1473943A1 |
| КОЛЛАБОРАТИВНАЯ СБОРОЧНО-ПРОИЗВОДСТВЕННАЯ ЛИНИЯ | 2020 |
|
RU2771901C2 |
| МОБИЛЬНОЕ РОБОТИЗИРОВАННОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ГРУЗОВ В АВТОМАТИЗИРОВАННОЙ СИСТЕМЕ ХРАНЕНИЯ И ПОИСКА | 2024 |
|
RU2831700C1 |
| Захватное устройство для деталей | 1980 |
|
SU956271A1 |
| Гибкий производственный модуль | 1988 |
|
SU1593915A1 |
| Приводное устройство для вращения захвата руки промышленного робота относительно взаимно-перпендикулярных осей и движения губок захвата | 1980 |
|
SU919865A2 |
| АДАПТИВНАЯ КОЛЕСНАЯ ОПОРА ТРАНСПОРТНОГО МОДУЛЯ ВНУТРИТРУБНОГО ДИАГНОСТИЧЕСКОГО РОБОТА | 2023 |
|
RU2821671C1 |
| Захватное устройство | 1984 |
|
SU1199614A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
Изобретение относится к области робототехники. Адаптивное электромеханическое захватное устройство для промышленных и коллаборативных роботов представляет собой центральный модуль захватного устройства, состоящий из мотор-редуктора, корпуса с установленным внутри тормозным соленоидом, входящим в зацепление с тормозным диском, на котором установлен постоянный диаметрально поляризованный магнит платы с управляющей электроникой, расположенной в основании корпуса на центрирующем кольце. Винты соединяют корпус и мотор-редуктор. Имеется фланец-адаптер для соединения с центральным модулем захвата для сборки с роботом и разъём для подключения интерфейсного кабеля. Центральный модуль захвата служит для генерации движения и закрепления сменных кинематических модулей двухпальцевого и трехпальцевого исполнения посредством зацепления мотор-редуктора с кинематическим модулем через быстроразъемную полумуфту. За счет модульной конструкции обеспечивается возможность изменения схемы захвата. 2 з.п. ф-лы, 8 ил.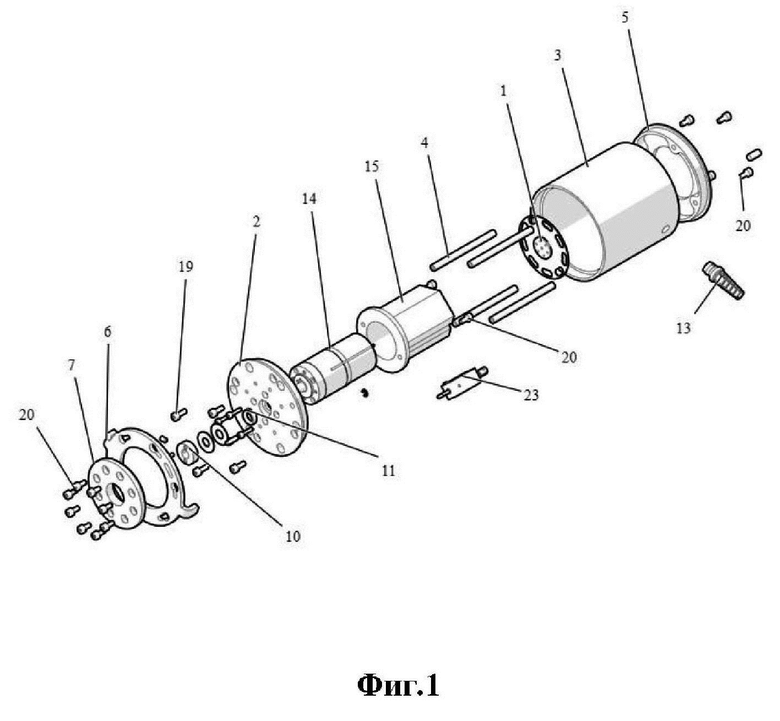
1. Адаптивное электромеханическое захватное устройство для промышленных и коллаборативных роботов, отличающееся тем, что представляет собой центральный модуль адаптивного захватного устройства, состоящий из мотор-редуктора, корпуса с установленным внутри тормозным соленоидом, входящим в зацепление с тормозным диском, на котором установлен постоянный диаметрально поляризованный магнит платы с управляющей электроникой, расположенной в основании корпуса на центрирующем кольце, и винтов, соединяющих корпус и мотор-редуктор, фланца-адаптера для соединения с центральным модулем адаптивного захватного устройства для сборки с роботом и разъема для подключения интерфейсного кабеля, при этом центральный модуль схвата служит для генерации движения и закрепления сменных кинематических модулей двухпальцевого и трехпальцевого схватов посредством зацепления мотор-редуктора с кинематическим модулем через быстроразъемную муфту.
2. Адаптивное электромеханическое захватное устройство для промышленных и коллаборативных роботов по п. 1, отличающееся тем, что при сборке с роботом центральный модуль адаптивного захватного устройства монтируется на фланец-адаптер и закрепляется при помощи винтов.
3. Адаптивное электромеханическое захватное устройство для промышленных и коллаборативных роботов по п. 1, отличающееся тем, что корпуса кинематических модулей и центрального модуля адаптивного захватного устройства выполнены из металла и покрыты антистатическим лаком.
| Пневматический бинт для усиления родовой деятельности | 1958 |
|
SU118579A1 |
| СМЕННАЯ МУФТА | 2020 |
|
RU2769147C1 |
| JP 2010149224 A, 08.07.2010 | |||
| US 20220324120 A1, 13.10.2022 | |||
| JP 3172028 B2, 04.06.2001 | |||
| Устройство для стыковки сменного инструмента с кистью промышленного робота | 1986 |
|
SU1463412A1 |
| Адаптивный захват | 1988 |
|
SU1542796A1 |

