ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННУЮ ЗАЯВКУ
[0001] Настоящая заявка испрашивает приоритет по китайской патентной заявки № 201710038617.6, поданной 19 января 2017 г., содержание которой в полном объеме включено в настоящую заявку по ссылке.
ОБЛАСТЬ ИЗОБРЕТЕНИЯ
[0002] В целом настоящее изобретение относится к рентгеновской визуализации и, в частности, к системам и способам управления перемещением источника рентгеновского излучения посредством подвесного устройства.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
[0003] Рентгеновская визуализации нашла в последние годы широкое применение при клинических исследованиях и в медицинской диагностике. При использовании устройства рентгеновской визуализации для выполнения сканирования, пользователю (например, врачу, технику) требуется управлять устройством рентгеновской визуализации. Например, врач может нуждаться в перемещении источника рентгеновского излучения устройства рентгеновской визуализации в целевое положение для выполнения сканирования. Поэтому желательно обеспечить системы и способы для эффективного перемещения источника рентгеновского излучения устройства рентгеновской визуализации в целевое положение.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] В соответствии с аспектом настоящего изобретения система может включать в себя устройство рентгеновской визуализации, устройство управления, запоминающее устройство, хранящее набор команд и по меньшей мере один процессор, выполненный с возможностью связи с запоминающим устройством. Устройство рентгеновской визуализации может включать в себя подвесное устройство. Подвесное устройство может включать в себя источник рентгеновского излучения и быть подвешенным с направляющей. Подвесное устройство может быть перемещаемым по направляющей. Направляющая может содержать первое целевое положение и первую контрольную точку, соответствующую первому целевому положению. Устройство управления может быть выполнено с возможностью управления подвесным устройством. При выполнении набора команд упомянутый по меньшей мере один процессор может заставлять систему получать во время перемещения подвесного устройства по направляющей первую скорость подвесного устройства в первой контрольной точке. Упомянутый по меньшей мере один процессор может также заставлять систему определять, является ли первая скорость подвесного устройства в первой контрольной точке меньше пороговой скорости. В ответ на определение того, что первая скорость подвесного устройства в первой контрольной точке меньше пороговой скорости упомянутый по меньшей мере один процессор может заставлять систему приводить в действие устройство управления для перемещения подвесного устройства в первое целевое положение.
[0005] В некоторых вариантах осуществления подвесное устройство может иметь фиксированное состояние и состояние ручного перемещения. В фиксированном состоянии подвесное устройство может быть выполнено фиксируемым к направляющей. В состоянии ручного перемещения подвесное устройство может быть выполнено перемещаемым пользователем вручную. Подвесное устройство может работать в фиксированном состоянии в исходной положении подвесного устройства на направляющей. Упомянутый по меньшей мере один процессор может также заставлять систему получать запрос на снятие фиксации подвесного устройства и приводить в действие устройство управления, чтобы перевести подвесное устройство из фиксированного состояния в состояние ручного перемещения.
[0006] В некоторых вариантах осуществления подвесное устройство может дополнительно иметь состояние автоматического перемещения. В состоянии автоматического перемещения подвесное устройство может быть выполнено перемещаемым устройством управления. По меньшей мере один процессор может также заставлять систему приводить в действие устройство управления, чтобы перевести подвесное устройство из состояния ручного перемещения в состояние автоматического перемещения.
[0007] В некоторых вариантах осуществления по меньшей мере один процессор может также заставлять систему приводить в действие устройство управления, чтобы перевести подвесное устройство из состояния автоматического перемещения в фиксированное состояние в первом целевом положении.
[0008] В некоторых вариантах осуществления устройство управления может включать в себя муфту и электродвигатель. Подвесное устройство может работать в фиксированном состоянии, когда муфта замкнута, а электродвигатель выключен. Подвесное устройство может работать в состоянии ручного перемещения, когда муфта разомкнута, а электродвигатель выключен. Подвесное устройство может работать в состоянии автоматического перемещения, когда муфта замкнута, а электродвигатель включен.
[0009] В некоторых вариантах осуществления направляющая может дополнительно содержать второе целевое положение и вторую контрольную точку, соответствующую второму целевому положению. В ответ на определение того, что первая скорость подвесного устройства в первой контрольной точке не меньше пороговой скорости, упомянутый по меньшей мере один процессор может заставлять систему поддерживать подвесное устройство в состоянии ручного перемещения. Упомянутый по меньшей мере один процессор может также заставлять систему получать во время перемещения подвесного устройства по направляющей вторую скорость подвесного устройства во второй контрольной точке. Упомянутый по меньшей мере один процессор может дополнительно заставлять систему определять, является ли вторая скорость подвесного устройства во второй контрольной точке меньше пороговой скорости. В ответ на определение того, что вторая скорость подвесного устройства во второй контрольной точке меньше пороговой скорости упомянутый по меньшей мере один процессор может заставлять систему приводить в действие устройство управления для перемещения подвесного устройства во второе целевое положение.
[0010] В некоторых вариантах осуществления направляющая может содержать множество первых контрольных точек, соответствующих первому целевому положению. По меньшей мере одна из упомянутого множества первых контрольных точек может располагаться с одной стороны от первого целевого положения и по меньшей мере одна из упомянутого множества первых контрольных точек может располагаться с другой стороны от первого целевого положения вдоль направляющей.
[0011] В некоторых вариантах осуществления упомянутый по меньшей мере один процессор может также заставлять систему определять первую контрольную точку, соответствующую первому целевому положению на направляющей. Расстояние между первой контрольной точкой и первым целевым положением может быть меньше предварительно заданного расстояния.
[0012] В некоторых вариантах осуществления предварительно заданное расстояние может быть меньше 90 мм, 100 мм или 110 мм.
[0013] В некоторых вариантах осуществления первое целевое положение может быть связано с расстоянием от источника до приемника изображения (SID) устройства рентгеновской визуализации.
[0014] В соответствии с другим аспектом настоящего изобретения способ, реализуемый в компьютерном устройстве, может включать в себя одну или более из следующих операций, выполняемых по меньшей мере одним процессором. Способ может включать в себя получение во время перемещения подвесного устройства по направляющей первой скорости подвесного устройства в первой контрольной точке на направляющей. Подвесное устройство может включать в себя источник рентгеновского излучения и быть подвешенным с направляющей. Подвесное устройство может быть перемещаемым по направляющей. Первая контрольная точка может соответствовать первому целевому положению на направляющей. Способ может также включать в себя определение того, является ли первая скорость подвесного устройства в первой контрольной точке меньше пороговой скорости. В ответ на определение того, что первая скорость подвесного устройства в первой контрольной точке меньше пороговой скорости, способ может дополнительно включать в себя приведение в действие устройства управления для перемещения подвесного устройства в первое целевое положение.
[0015] В соответствии с еще одним аспектом настоящего изобретения невременный машиночитаемый носитель данных, хранящий команды, которые, будучи исполняемыми по меньшей мере одним процессором системы, заставляют систему выполнять способ. Способ может включать в себя получение во время перемещения подвесного устройства по направляющей первой скорости подвесного устройства в первой контрольной точке на направляющей. Подвесное устройство может включать в себя источник рентгеновского излучения и быть подвешенным с направляющей. Подвесное устройство может быть перемещаемым по направляющей. Первая контрольная точка может соответствовать первому целевому положению на направляющей. Способ может также включать в себя определение того, является ли первая скорость подвесного устройства в первой контрольной точке меньше пороговой скорости. В ответ на определение того, что первая скорость подвесного устройства в первой контрольной точке меньше пороговой скорости, способ может дополнительно включать в себя приведение в действие устройства управления для перемещения подвесного устройства в первое целевое положение.
[0016] В соответствии с еще одним аспектом настоящего изобретения система может включать в себя модуль сбора данных, модуль определения и модуль управления. Модуль сбора данных может быть выполнен с возможностью получения во время перемещения подвесного устройства по направляющей первой скорости подвесного устройства в первой контрольной точке на направляющей. Подвесное устройство может включать в себя источник рентгеновского излучения и быть подвешенным с направляющей. Подвесное устройство может быть перемещаемым по направляющей. Первая контрольная точка может соответствовать первому целевому положению на направляющей. Модуль определения может быть выполнен с возможностью определения того, является ли первая скорость подвесного устройства в первой контрольной точке меньше пороговой скорости. Модуль управления может быть выполнен с возможностью приведения в действие устройства управления для перемещения подвесного устройства в первое целевое положение в ответ на определение того, что первая скорость подвесного устройства в первой контрольной точке меньше пороговой скорости.
[0017] Дополнительные признаки будут кроме того изложены в последующем описании и к тому же будут очевидны специалистам в области техники после изучения последующего описания и прилагаемых чертежей или могут быть усвоены при изготовлении или применении примеров. Признаки настоящего изобретения можно реализовать и получить путем практического внедрения или применения различных аспектов методологии, инструментария и комбинаций, изложенных в нижеописанных подробных примерах.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0018] Настоящее изобретение дополнительно описано в дальнейшем на примерных вариантах осуществления. Данные примерные варианты осуществления подробно описаны со ссылкой на чертежи. Данные варианты осуществления являются неограничивающими примерными вариантами осуществления, в которых схожие числовые позиции представляют одинаковые структуры на нескольких видах чертежей, и где
[0019] Фиг. 1 - схематическое изображение, поясняющее примерную систему рентгеновской визуализации в соответствии с некоторыми вариантами осуществления настоящего изобретения;
[0020] Фиг. 2 - схематическое изображение, поясняющее примерные аппаратные и/или программные компоненты примерного компьютерного устройства, в котором можно реализовать подсистему обработки данных в соответствии с некоторыми вариантами осуществления настоящего изобретения;
[0021] Фиг. 3 - схематическое изображение, поясняющее примерные аппаратные и/или программные компоненты примерного мобильного устройства, на котором можно реализовать терминал в соответствии с некоторыми вариантами осуществления настоящего изобретения;
[0022] Фиг. 4 - блок-схема, поясняющая примерную подсистему обработки данных в соответствии с некоторыми вариантами осуществления настоящего изобретения;
[0023] Фиг. 5 - блок-схема последовательности операций, поясняющая примерную процедуру управления подвесным устройством в соответствии с некоторыми вариантами осуществления настоящего изобретения;
[0024] Фиг. 6 - блок-схема последовательности операций, поясняющая примерную процедуру управления подвесным устройством в соответствии с некоторыми вариантами осуществления настоящего изобретения;
[0025] Фиг. 7 - схематическое изображение, поясняющее примерное расстояние от источника до приемника изображения (SID) устройства визуализации в соответствии с некоторыми вариантами осуществления настоящего изобретения;
[0026] Фиг. 8 - схематическое изображение, поясняющее примерное расположение целевых положений и контрольных точек на направляющей устройства рентгеновской визуализации в соответствии с некоторыми вариантами осуществления настоящего изобретения; и
[0027] Фиг. 9 - схематическое изображение, поясняющее примерное расположение целевого положения и контрольных точек на направляющей устройства рентгеновской визуализации в соответствии с некоторыми вариантами осуществления настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ
[0028] В последующем подробном описании изложены на примерах многочисленные конкретные подробности, чтобы обеспечить всестороннее понимание соответствующего изобретения. Однако специалистам в области техники должно быть очевидно, что настоящее изобретение можно практически применить без таких подробных сведений. В других случаях общеизвестные способы, процедуры, системы, компоненты и/или схемы описаны на относительно высоком уровне, без подробностей, во избежание необязательного затенения аспектов настоящего изобретения. Специалистам в данной области техники будут очевидны различные модификации раскрытых вариантов осуществления, и описанные здесь общие принципы можно применить к другим вариантам осуществления и применениям, без отклонения от существа и объема настоящего изобретения. Таким образом, настоящее изобретение не ограничено показанными вариантами осуществления, но отвечает самому широкому объему, соответствующему формуле изобретения.
[0029] Терминология, используемая в настоящей заявке, предназначена для описания только конкретных примерных вариантов осуществления и не предполагает ограничения. В контексте настоящей заявки предполагается, что формы единственного числа включают в себя также формы множественного числа, если контекст не предусматривает иное. Дополнительно следует понимать, что термины «содержат», «содержит» и/или «содержащий», «включают в себя», «включает в себя» и/или «включающий в себя», при использовании в настоящем описании, определяют присутствие заявленных признаков, объектов, этапов, операций, элементов и/или компонентов, но не исключают присутствие или добавление одного или более других признаков, объектов, этапов, операций, элементов, компонентов или их групп.
[0030] Следует понимать, что термины «система», «подсистема», «компонент», «модуль» и/или «блок», используемые в настоящей заявке, являются способом различения разных компонентов, элементов, частей, секций или сборочных узлов разных уровней в восходящем порядке. Однако термины можно заменять другими выражениями, если они служат той же цели.
[0031] В общем, выражение «модуль», «компонент» или «блок», используемое в настоящей заявке, относится к логике, встроенной в аппаратное или аппаратно-программное обеспечение или к совокупности программируемых команд. Модуль, компонент или блок, описанные в настоящей заявке, могут быть реализованы как программное и/или аппаратное обеспечение и может храниться на невременном машиночитаемом носителе любого типа или в другом запоминающем устройстве. В некоторых вариантах осуществления программный модуль/компонент/блок может быть скомпилирован и связан в исполняемую программу. Следует понимать, что программные модули могут вызываемыми из других модулей/компонентов/блоков или сами по себе и/или могут вызываться в ответ на обнаруженные события или прерывания. Программные модули/компоненты/блоки, сконфигурированные для выполнения в компьютерных устройствах (например, процессоре 210, показанном на фиг. 2, и/или центральном процессорном устройстве (CPU) 340, показанном на фиг. 3) могут предоставляться на машиночитаемом носителе, например, компакт-диске, цифровом видеодиске, флэш-накопителе, магнитном диске или любом другом материальном носителе, или путем цифровой загрузки (и могут первоначально храниться в сжатом или устанавливаемом формате, который нуждается в установке, распаковке или декодировании перед выполнением). Такой программный код может храниться, частично или полностью, в запоминающем устройстве исполнительного компьютерного устройства для исполнения компьютерным устройством. Программируемые команды могут быть встроены в аппаратно-программное обеспечение, например, стираемую программируемую постоянную память EPROM. Дополнительно должно быть ясно, что аппаратные модули/компоненты/блоки могут содержаться в подключенных логических компонентах, например, вентильных схемах и триггерах и/или могут содержаться в программируемых компонентах, например, программируемых вентильных матрицах или процессорах. Функции модулей/компонентов/блоков или компьютерного устройства, описанные в настоящей заявке, могут быть реализованы в виде программных модулей/компонентов/блоков, но могут быть представлены в аппаратном или аппаратно-программном обеспечении. В общем, модули/компоненты/блоки, описанные в настоящей заявке, относятся к логическим модулям/компонентам/блокам, которые могут объединяться с другими модулями/компонентами/блоками или разделяться на субмодули/субкомпоненты/субблоки, независимо от их физической организации или хранения. Описание может также относиться к системе, подсистеме или их участку.
[0032] Следует понимать, что, когда компонент, подсистема, модуль или блок упоминается как «находящийся на», «соединенный с», или «связанный с» другим компонентом, подсистемой, модулем или блоком, он может непосредственно находиться на, быть соединенным или связанным, или обмениваться данными с другим компонентом, подсистемой, модулем или блоком, или может существовать промежуточный компонент, подсистема, модуль или блок, если контекст явно не предусматривает иное. В контексте настоящей заявки выражение «и/или» включает в себя все комбинации одного или более из соответствующих перечисленных объектов.
[0033] Приведенные и другие признаки и характеристики настоящего изобретения, а также способов работы и функций соответствующих элементов конструкции и комбинации частей и организации производства могут стать более понятными после рассмотрения нижеследующего описания со ссылками на прилагаемые чертежи, которые в совокупности составляют часть настоящего раскрытия. Однако следует четко понимать, что чертежи предназначены исключительно для наглядности и описания и не предполагают ограничения объема настоящего изобретения. Следует понимать, что чертежи выполнены не в масштабе.
[0034] В настоящей заявке предлагаются системы и компоненты для медицинской визуализации. В некоторых вариантах осуществления система визуализации может включать в себя одномодальную систему визуализации и/или мультимодальную систему визуализации. Одномодальная система визуализации может включать в себя, например, систему рентгеновской визуализации. Мультимодальная система визуализации может включать в себя, например, систему рентгеновской визуализации/магнитно-резонансной томографии (рентгеновскую/МРТ систему), систему позитронно-эмиссионной томографии/рентгеновской визуализации (ПЭТ/рентгеновскую систему) и т.п. Для наглядности, раскрытие описывает системы и способы, относящиеся к системе рентгеновской визуализации. Следует отметить, что нижеописанная система рентгеновской визуализации представлена исключительно в иллюстративных целях и не предполагает ограничения объема настоящего изобретения.
[0035] Аспект настоящего изобретения относится к системам и способам для управления устройством рентгеновской визуализации. Устройство рентгеновской визуализации может включать в себя подвесное устройство. Подвесное устройство может включать в себя источник рентгеновского излучения и быть подвешенным с направляющей. Подвесное устройство может быть перемещаемым и выполненным с возможностью перемещения по направляющей. Направляющая может содержать целевое положение для подвесного устройства и контрольную точку, соответствующую целевому положению. Системы могут выполнять способы получения скорости подвесного устройства в контрольной точке во время перемещения подвесного устройства по направляющей. Системы могут выполнять способы определения того, является ли скорость подвесного устройства в контрольной точке меньше пороговой скорости. После определения того, что скорость подвесного устройства в контрольной точке меньше пороговой скорости, системы могут выполнять способы приведения в действие устройства управления, чтобы переместить подвесное устройство в целевое положение.
[0036] Фиг. 1 является схематическим изображением, иллюстрирующим примерную систему 100 рентгеновской визуализации в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на фиг. 1, система 100 рентгеновской визуализации может включать в себя устройство 110 рентгеновской визуализации, сеть 120, один или более терминалов 130, подсистему 140 обработки данных и запоминающее устройство 150. Соединение между компонентами в системе 100 рентгеновской визуализации может быть изменяемым. Например, устройство 110 рентгеновской визуализации и/или терминал(ы) 130 могут соединяться с подсистемой 140 обработки данных по сети 120. В другом примере устройство 110 рентгеновской визуализации и/или терминал(ы) 130 могут соединяться с подсистемой 140 обработки данных непосредственно.
[0037] Устройство 110 рентгеновской визуализации может быть выполнено с возможностью сканирования объекта с использованием рентгеновского излучения и формирования данных визуализации, используемых для формирования одного или более изображений, относящихся к объекту. В некоторых вариантах осуществления устройство 110 рентгеновской визуализации может передавать данные визуализации в подсистему 140 обработки данных для дополнительной обработки (например, формирования одного или более изображений). В некоторых вариантах осуществления данные визуализации и/или упомянутое одно или более изображений, связанных с объектом, могут сохраняться в запоминающем устройстве 150 и/или подсистеме 140 обработки данных.
[0038] В некоторых вариантах осуществления устройство 110 рентгеновской визуализации может быть подвесным устройством рентгеновской визуализации. Объект может быть биологическим или небиологическим. Только в качестве примера объект может включать в себя пациента, объект искусственного происхождения и т.п. В качестве другого примера, объект может включать в себя конкретные участок, орган и/или ткань пациента. Например, объект может включать в себя голову, головной мозг, шею, тело, плечо, руку, грудную клетку, сердце, желудок, кровеносный сосуд, мягкую ткань, колено, стопу или что-то подобное, или любую комбинацию перечисленного.
[0039] В некоторых вариантах осуществления устройство 110 рентгеновской визуализации может быть подвесным устройством рентгеновской визуализации, как показано на фиг. 1. Устройство 110 рентгеновской визуализации может включать в себя опору 111, детектор 112, направляющую 115 и подвесное устройство 116. Опора 111 может быть выполнена с возможностью поддержки детектора 112. В некоторых вариантах осуществления опора 111 может иметь форму стойки, как показано на фиг. 1. В качестве альтернативы, опора 111 может иметь любую другую форму, например, C-образную, O-образную, U-образную, G-образную или какую-то подобную, или скомбинированную из перечисленных форм.
[0040] Подвесное устройство 116 может включать в себя подвесной держатель 114 и источник 113 рентгеновского излучения. Подвесной держатель 114 может быть выполнен с возможностью подвешивания источника 113 рентгеновского излучения с направляющей 115. В некоторых вариантах осуществления подвесное устройство 116 может быть перемещаемым и выполненным с возможностью перемещения по направляющей 115, и источник 113 рентгеновского излучения может перемещаться вместе с подвесным устройством 116. Например, пользователь может перемещать подвесной держатель 114 или другую часть подвесного устройства 116, чтобы переместить источник 113 рентгеновского излучения в искомое положение. В качестве альтернативы или дополнительно, подвесное устройство 116 может быть автоматически перемещаемым по направляющей посредством устройства управления. В некоторых вариантах осуществления направляющая 115 может содержать одно или более целевых положений для подвесного устройства 116. Подвесное устройство 116 может быть перемещено в целевое положение вручную пользователем или автоматически, посредством устройства управления, чтобы источник 113 рентгеновского излучения мог сканировать объект в целевом положении (т.е. положении источника 113 рентгеновского излучения, соответствующем целевому положению, в которое перемещают подвесное устройство 116). В некотором варианте осуществления на подвесном устройстве 116 может быть установлена панель управления (не показанная на фиг. 1). Пользователь может управлять подвесным устройством 116 при посредстве панели управления. Дополнительные сведения о подвесном устройстве 116 можно найти в других местах настоящего раскрытия (например, на фиг. 5-9 и в описании к ним).
[0041] Источник 113 рентгеновского излучения может излучать к объекту один или более пучков рентгеновского излучения. В некоторых вариантах осуществления источник 113 рентгеновского излучения может включать в себя рентгеновскую трубку (не показанную на фиг. 1) и устройство ограничения пучка (не показанное на фиг. 1). Рентгеновская трубка может быть выполнена с возможностью излучения одного или более пучков рентгеновского излучения к объекту, подлежащему сканированию. Устройство ограничения пучка может быть выполнено с возможностью управления областью облучения на объекте. Устройство ограничения пучка может быть также выполнено с возможностью регулирования интенсивности и/или числа пучков рентгеновского излучения, которые облучают объект.
[0042] Детектор 112 может детектировать радиоактивное излучение, излучаемое источником 113 рентгеновского излучения. В некоторых вариантах осуществления детектор 112 может быть выполнен с возможностью формирования аналогового электрического сигнала, который представляет интенсивность принятого рентгеновского излучения, в том числе, ослабленного пучка, когда он проходит сквозь объект. В некоторых вариантах осуществления детектор 112 может включать в себя один или более детекторных блоков. Детекторные блоки могут включать в себя сцинтилляционный детектор (например, цезий-йодидный детектор), газовый детектор и т.п. Пиксели детектора могут быть представлены множеством малых детекторных блоков, например, рядом детекторных блоков. Детекторные блоки детектора 112 могут располагаться в один ряд, два ряда или другое число рядов. Рентгеновский детектор может быть одномерным, двумерным или трехмерным.
[0043] Сеть 120 может включать в себя любую подходящую сеть, которая может ускорять обмен информацией и/или данными для системы 100 рентгеновской визуализации. В некоторых вариантах осуществления один или более компонентов системы 100 рентгеновской визуализации (например, устройство 110 рентгеновской визуализации, терминал 130, подсистема 140 обработки данных, запоминающее устройство 150) могут обмениваться информацией и/или данными с одним или более другими компонентами системы 100 рентгеновской визуализации по сети 120. Например, подсистема 140 обработки данных может получать данные изображения из устройства 110 рентгеновской визуализации по сети 120. В качестве другого примера подсистема 140 обработки данных может получать пользовательские команды из терминала(ов) 130 по сети 120. Сеть 120 может включать в себя общедоступную сеть (например, Интернет), частную сеть (например, локальную сеть (LAN), глобальную сеть (WAN), проводную сеть (например, сеть Ethernet), беспроводную сеть (например, сеть 802.11, сеть Wi-Fi), сотовая сеть (например, сеть Long Term Evolution (LTE)), сеть Frame Relay, виртуальную частную сеть («VPN»), спутниковую сеть, телефонную сеть, роутеры, концентраторы, переключатели, компьютеры-серверы и/или любая их комбинация. Только в качестве примера, сеть 120 может включать в себя кабельную сеть, проводную сеть, волоконно-оптическую сеть, телекоммуникацию сеть, внутреннюю сеть, беспроводную локальную сеть (WLAN), региональную сеть (MAN), телефонную коммутируемую сеть общего пользования (PSTN), сеть Bluetooth™, сеть ZigBee™, сеть коммуникации ближнего поля (NFC) или что-то подобное, или любую их комбинацию. В некоторых вариантах осуществления сеть 120 может включать в себя один или более пунктов доступа к сети. Например, сеть 120 может включать в себя пункты доступа к проводной и/или беспроводной сети, например, базовые станции и/или точки обмена трафиком Интернет, через которые один или более компонентов системы 100 рентгеновской визуализации могут подключаться к сети 120, чтобы обмениваться данными и/или информацией.
[0044] Терминал(ы) 130 может (могут) включать в себя мобильное устройство 131, планшетный компьютер 132, переносной компьютер 133 или что-то подобное, или любую их комбинацию. В некоторых вариантах осуществления мобильное устройство 131 может включать в себя интеллектуальное домашнее устройство, носимое устройство, мобильное устройство, устройство виртуальной реальности, устройство дополненной реальности или что-то подобное, или любую их комбинацию. В некоторых вариантах осуществления интеллектуальное домашнее устройство может включать в себя интеллектуальное осветительное устройство, устройство управления интеллектуальным электрическим устройством, интеллектуальное мониторинговое устройство, интеллектуальный телевизор, интеллектуальную видеокамеру, телефон внутренней связи или что-то подобное, или любую их комбинацию. В некоторых вариантах осуществления носимое устройство может включать в себя браслет, ножной браслет, очки, шлем, часы, одежду, ранец, интеллектуальное приспособление или что-то подобное, или любую их комбинацию. В некоторых вариантах осуществления мобильное устройство может включать в себя мобильный телефон, электронного секретаря (PDA), навигационное устройство, переносной компьютер, планшетный компьютер, настольный компьютер или что-то подобное, или любую их комбинацию. В некоторых вариантах осуществления устройство виртуальной реальности и/или устройство дополненной реальности могут включать в себя шлем виртуальной реальности, очки виртуальной реальности, патч для виртуальной реальности, шлем дополненной реальности, очки дополненной реальности, патч для дополненной реальности или что-то подобное, или любую их комбинацию. Например, устройство виртуальной реальности и/или устройство дополненной реальности могут включать в себя чки Google Glass™, Oculus Rift™, HoloLens™, Gear VR™ и т.п. В некоторых вариантах осуществления терминал(ы) 130 могут входить в состав подсистемы 140 обработки данных.
[0045] Подсистема 140 обработки данных может обрабатывать данные и/или информацию, полученные из устройства 110 рентгеновской визуализации, терминала(ов) 130 и/или запоминающего устройства 150. Например, подсистема 140 обработки данных может обрабатывать данные изображения и реконструировать изображение по данным изображения. В некоторых вариантах осуществления подсистема 140 обработки данных может быть одним сервером или группой серверов. Группа серверов может быть централизованной или распределенной. В некоторых вариантах осуществления подсистема 140 обработки данных может быть локальной или удаленной. Например, подсистема 140 обработки данных может выбирать информацию и/или данные, хранящиеся в устройстве 110 рентгеновской визуализации, терминале(ах) 130 и/или запоминающем устройстве 150, по сети 120. В качестве другого примера, подсистема 140 обработки данных может быть непосредственно подсоединена к устройству 110 рентгеновской визуализации, терминалу(ам) 130 и/или запоминающему устройству 150, чтобы иметь доступ к хранящимся информации и/или данным. В некоторых вариантах осуществления подсистема 140 обработки данных может быть реализована на облачной платформе. Только в качестве примера, облачная платформа может включать в себя частное облако, общедоступное облако, гибридное облако, общественное облако, распределенное облако, интероблако, мультиоблако или что-то подобное, или любую их комбинацию. В некоторых вариантах осуществления подсистема 140 обработки данных может быть реализована компьютерным устройством 200, имеющем один или более компонентов, как показано на фиг. 2. В некоторых вариантах осуществления подсистема 140 обработки данных или участок подсистемы 140 обработки данных может быть интегрированной(ым) в устройство 110 рентгеновской визуализации.
[0046] Запоминающее устройство 150 может хранить данные, команды и/или любую другую информацию. В некоторых вариантах осуществления запоминающее устройство 150 может хранить данные, полученные из терминала(ов) 130 и/или подсистемы 140 обработки данных. В некоторых вариантах осуществления запоминающее устройство 150 может хранить данные и/или команды, которые подсистема 140 обработки данных может выполнять или использовать для выполнения примерных способов, описанных в настоящем раскрытии. В некоторых вариантах осуществления запоминающее устройство 150 может включать в себя запоминающее устройство сверхбольшой емкости, съемное запоминающее устройство, энергозависимую память для чтения и записи, постоянную память (ROM) или что-то подобное, или любую их комбинацию. Примерное запоминающее устройство сверхбольшой емкости может включать в себя магнитный диск, оптический диск, твердотельный накопитель и т.п. Примерное съемное запоминающее устройство может включать в себя флэш-накопитель, дискету, оптический диск, карту памяти, zip-диск, магнитную ленту и т.п. Примерная энергозависимая память для чтения и записи может включать в себя память с произвольным доступом (RAM). Примерная RAM может включать в себя динамическую RAM (DRAM), синхронную DRAM удвоенной частоты (DDR SDRAM), статическую RAM (SRAM), тиристорную RAM (T-RAM) и бесконденсаторную (zero-capacitor) RAM (Z-RAM) и т.п. Примерная ROM может включать в себя масочную ROM (MROM), программируемую ROM (PROM), стираемую программируемую ROM (EPROM), электрически стираемую программируемую ROM (EEPROM), ROM на компакт-диске (CD-ROM), ROM на цифровом видеодиске и т.п. В некоторых вариантах осуществления запоминающее устройство 150 может быть реализовано на облачной платформе. Только в качестве примера, облачная платформа может включать в себя частное облако, общедоступное облако, гибридное облако, общественное облако, распределенное облако, интероблако, мультиоблако или что-то подобное, или любую их комбинацию.
[0047] В некоторых вариантах осуществления запоминающее устройство 150 может быть подключено к сети 120, чтобы обмениваться информацией с одним или более другими компонентами системы 100 рентгеновской визуализации (например, подсистемой 140 обработки данных, терминалом(ами) 130). Один или более компонентов системы 100 рентгеновской визуализации могут получать доступ к данным или командам, хранящимся в запоминающем устройстве 150 по сети 120. В некоторых вариантах осуществления запоминающее устройство 150 может иметь непосредственное соединение или обмениваться данными с одним или более другими компонентами системы 100 рентгеновской визуализации (например, подсистемой 140 обработки данных, терминалом(ами) 130). В некоторых вариантах осуществления запоминающее устройство 150 может входить в состав подсистемы 140 обработки данных.
[0048] Настоящее описание предназначено для пояснения, а не для ограничения объема настоящего изобретения. Специалистам будут очевидны многочисленные альтернативы, модификации и варианты. Признаки, конструкции, способы и другие характеристики примерных вариантов осуществления, описанных в настоящей заявке, можно объединять различными способами, чтобы получать дополнительные и/или альтернативные примерные варианты осуществления. Например, подсистема 140 обработки данных и устройство 110 рентгеновской визуализации могут быть объединены в одно устройство. Однако упомянутые варианты и модификации не выходят за пределы объема настоящего изобретения.
[0049] Фиг. 2 является схематическим изображением, иллюстрирующим примерные аппаратные и/или программные компоненты примерного компьютерного устройства 200, в котором может быть реализована подсистема 140 обработки данных в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на фиг. 2, компьютерное устройство 200 может включать в себя процессор 210, запоминающее устройство 220, устройство 230 ввода/вывода (I/O) и коммуникационный порт 240.
[0050] Процессор 210 может выполнять компьютерные команды (например, программный код) и выполнять функции подсистемы 140 обработки данных в соответствии с методами, описанными в настоящей заявке. Компьютерные команды могут включать в себя, например, подпрограммы, программы, объекты, компоненты, структуры данных, процедуры, модули и функции, которые выполняют конкретные функции, описанные в настоящей заявке. Например, процессор 210 может обрабатывать данные изображения, полученные из устройства 110 рентгеновской визуализации, терминала(ов) 130, запоминающего устройства 150 и/или любого другого компонента системы 100 рентгеновской визуализации. В некоторых вариантах осуществления процессор 210 может включать в себя один или более аппаратных процессоров, например, микроконтроллер, микропроцессор, компьютер с сокращенным набором команд (RISC), специализированные заказные интегральные схемы (ASIC), специализированный процессор для обработки набора команд (ASIP), центральное процессорное устройство (CPU), графическое процессорное устройство (GPU), физический процессор (PPU), микроконтроллерный блок, цифровой сигнальный процессор (DSP), вентильную матрицу с эксплуатационным программированием (FPGA), усовершенствованную RISC-машину (ARM), программируемое логическое устройство (PLD), любую(ой) схему или процессор, способную(ый) выполнять одну или более функций, или что-то подобное, или любую их комбинацию.
[0051] В компьютерном устройстве 200 описан только для иллюстрации всего один процессор. Однако следует отметить, что компьютерное устройство 200 в настоящем изобретение может также включать в себя несколько процессоров. Таким образом, операции и/или этапы способа, которые выполняются одним процессором, как описано в настоящем раскрытии, могут также совместно или по отдельности выполняться несколькими процессорами. Например, если в настоящем раскрытии процессор компьютерного устройства 200 выполняет как процедуру A, так и процедуру B, то следует понимать, что процедура A, так и процедура B могут также выполняться двумя или более разными процессорами совместно или по отдельности в компьютерном устройстве 200 (например, первый процессор выполняет процедуру A, и второй процессор выполняет процедуру B, или первый и второй процессоры совместно выполняют процедуры A и B).
[0052] Запоминающее устройство 220 может хранить данные/информацию, полученные из устройства 110 рентгеновской визуализации, терминала(ов) 130, запоминающего устройства 150 и/или любого другого компонента системы 100 рентгеновской визуализации. Запоминающее устройство 220 может быть подобно запоминающему устройству 150, описанному в связи с фиг. 1, поэтому в данном случае подробное описание не повторяется.
[0053] Устройство I/O 230 может вводить и/или выводить сигналы, данные, информацию и т.п. В некоторых вариантах осуществления устройство I/O 230 может допускать взаимодействие пользователя с подсистемой 140 обработки данных. В некоторых вариантах осуществления устройство I/O 230 может включать в себя устройство ввода и устройство вывода. Примеры устройства ввода могут включать в себя клавиатуру, мышь, сенсорный экран, микрофон, звукозаписывающий прибор или что-то подобное, или их комбинацию. Примеры устройства вывода могут включать в себя устройство отображения, динамик, принтер, проектор или что-то подобное, или их комбинацию. Примеры устройства отображения могут включать в себя жидкокристаллический дисплей (LCD), дисплей на основе светоизлучающих диодов (СД), плоскопанельный дисплей, вогнутый экран, телевизионное устройство, электроннолучевую трубку (CRT), сенсорный экран или что-то подобное, или их комбинацию.
[0054] Коммуникационный порт 240 может быть подсоединен к сети (например, сети 120), чтобы облегчать передачу данных. Коммуникационный порт 240 может устанавливать соединения между подсистемой 140 обработки данных и устройством 110 рентгеновской визуализации, терминалом(ами) 130 и/или запоминающим устройством 150. Соединение может быть проводным соединением, беспроводным соединением, любым другим коммуникационным соединением, которое может облегчать передачу и/или прием данных, и/или любой комбинацией упомянутых соединений. Проводное соединение может включать в себя, например, электрический кабель, оптический кабель, телефонный провод или что-то подобное, или любую их комбинацию. Беспроводное соединение может включать в себя, например, канал Bluetooth™, канал Wi-Fi™, канал WiMax™, канал сети WLAN, канал сети ZigBee, канал сети мобильной связи (например, 3G, 4G, 5G) или что-то подобное, или любую их комбинацию. В некоторых вариантах осуществления коммуникационный порт 240 может представлять собой и/или включать в себя стандартный коммуникационный порт, например, RS232, RS485. В некоторых вариантах осуществления коммуникационный порт 240 может быть специализированным коммуникационным портом. Например, коммуникационный порт 240 может быть спроектирован в соответствии с протоколом цифровой визуализации и обмена информацией в медицине (DICOM).
[0055] Фиг. 3 является схематическим изображением, поясняющим примерные аппаратные и/или программные компоненты примерного мобильного устройства 300, на котором терминал(ы) 130 могут быть реализованы в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на фиг. 3, мобильное устройство 300 может включать в себя коммуникационную платформу 310, дисплей 320, графическое процессорное устройство (GPU) 330, центральное процессорное устройство (CPU) 340, устройство I/O 350, память 360 и запоминающее устройство 390. В некоторых вариантах осуществления в мобильное устройство 300 можно также включить любой другой подходящий компонент, включая, но без ограничения, системную шину или контроллер (не показанный). В некоторых вариантах осуществления из запоминающего устройства 390 в память 360 могут быть загружены мобильная операционная система 370 (например, iOS™, Android™, Windows Phone™) и одно или более приложений 380 для выполнения в CPU 340. Приложения 380 могут включать в себя браузер или любые другие подходящие мобильные приложения для приема и выдачи информации относительно обработки изображений или другой информации из подсистемы 140 обработки данных. Взаимодействия пользователя с потоком данных могут обеспечиваться через устройство I/O 350 и представляться в подсистему 140 обработки данных и/или другие компоненты системы 100 рентгеновской визуализации по сети 120.
[0056] Для реализации различных модулей, блоков и их функций, описанных в настоящем раскрытии, аппаратные платформы компьютера можно использовать как аппаратную(ые) платформу(ы) для одного или более из элементов, описанных в настоящей заявке. Компьютер с элементами пользовательского интерфейса можно использовать, чтобы реализовать персональный компьютер (PC) или рабочую станцию или внешнее устройство любого другого типа. Компьютер может также действовать как сервер, при соответствующем программировании.
[0057] Фиг. 4 является схематическим изображением, поясняющим примерную подсистему 140 обработки данных в соответствии с некоторыми вариантами осуществления настоящего изобретения. Подсистема 140 обработки данных может включать в себя модуль 410 сбора данных, модуль 420 определения и модуль 430 управления. По меньшей мере часть подсистемы 140 обработки данных может быть реализована в компьютерном устройстве 200, как показано на фиг. 2, или мобильном устройстве 300, как показано на фиг. 3.
[0058] Модуль 410 сбора данных может быть выполнен с возможностью получения информации или команд, относящихся к системе 100 рентгеновской визуализации. Например, модуль 410 сбора данных может получать скорость подвесного устройства 116 в некоторой точке (т.е. контрольной точке) на направляющей 115 во время его перемещения по направляющей 115. Скорость подвесного устройства 116 может извлекаться из одного или более компонентов системы 100 рентгеновской визуализации, например, датчика скорости, установленного на направляющей 115, позиционного кодового датчика и/или модуля 420 определения. В качестве другого примера модуль 410 сбора данных может получать запрос от пользователя на управление подвесным устройством 116 через посредство, например, терминала 130 или панели управления, смонтированной на подвесном устройстве 116.
[0059] Модуль 420 определения может быть выполнен с возможностью определения информации, относящейся к системе 100 рентгеновской визуализации. Например, модуль 420 определения может определять скорость подвесного устройства 116 в точке на направляющей 115, исходя из расстояния между подвесным устройством 116 и детектором 112 и периода времени. Только в качестве примера скорость подвесного устройства 116 в точке на направляющей 115 можно определять по изменению расстояния между подвесным устройством 116 и детектором 112 за период, в течение которого подвесное устройство 116 проходит через точку. Модуль 420 определения может также передавать найденную скорость в модуль 410 сбора данных. В качестве другого примера модуль 420 определения может определять, является ли скорость подвесного устройства 116 в контрольной точке на направляющей 115 меньше пороговой скорости. Пороговая скорость может быть параметром по умолчанию, хранящимся в запоминающем устройстве (например, запоминающем устройстве 150, запоминающем устройстве 390). Дополнительно или в качестве альтернативы, пороговая скорость может устанавливаться вручную или определяться одним или более компонентами системы 100 рентгеновской визуализации в зависимости от разных обстоятельств.
[0060] Модуль 430 управления может быть выполнен с возможностью приведения в действие устройства управления, чтобы управлять рабочим состоянием подвесного устройства 116. Устройство управления может управлять рабочим состоянием подвесного устройства 116 и включать в себя любую комбинацию механизмов для реализации его функций. Подвесное устройство 116 может иметь множество рабочих состояний, например, фиксированное состояние, состояние ручного перемещения, состояние автоматического перемещения, состояние останова и/или состояние ожидания. В некоторых вариантах осуществления модуль 430 управления может приводить в действие устройство управления путем передачи команды в устройство управления, например, по сети 120. Дополнительные сведения, касающиеся устройства управления и/или рабочего состояния подвесного устройства 116, можно найти в других местах настоящего раскрытия (например, на фиг. 6 и в описании к нему).
[0061] Следует отметить, что вышеприведенное описание, касающееся подсистемы 140 обработки данных, дано только с целью пояснения и не предполагает ограничения объема настоящего изобретения. После изучения настоящего раскрытия, средними специалистами в данной области техники могут быть созданы многочисленные варианты или модификации. Однако данные варианты и модификации не выходят за пределы объема настоящего изобретения. Например, подсистема 140 обработки данных может включать в себя модуль памяти, выполненный с возможностью сохранения данных, созданных вышеупомянутыми модулями подсистемы 140 обработки данных. Например, один или более модулей могут быть объединены в единственный модуль для выполнения их функций. Только в качестве примера, модуль 410 сбора данных и модуль 420 определения можно объединить в модуль сбора и анализа информации.
[0062] Фиг. 5 является блок-схемой последовательности операций, поясняющей примерную процедуру управления подвесным устройством в соответствии с некоторыми вариантами осуществления настоящего изобретения. В некоторых вариантах осуществления в системе 100 рентгеновской визуализации, показанной на фиг. 1, может быть реализована одна или более операций процедуры 500, показанной на фиг. 5. Например, процедура 500, показанная на фиг. 5, может храниться в запоминающем устройстве 150 в форме команд и может вызываться и/или выполняться подсистемой 140 обработки данных (например, процессором 210 компьютерного устройства 200, показанного на фиг. 2, или в CPU 340 мобильного устройства 300, показанного на фиг. 3).
[0063] В некоторых вариантах осуществления подвесное устройство, подлежащее управлению, может быть подвесным устройством 116 устройства 110 рентгеновской визуализации, описанного в связи с фиг. 1. Подвесное устройство 116 может включать в себя источник 113 рентгеновского излучения и быть подвешенным с направляющей 115. Подвесное устройство 116 может быть перемещаемым и выполненным с возможностью перемещения по направляющей 115, и источник 113 рентгеновского излучения может перемещаться вместе с подвесным устройством 116. Для сканирования разных объектов или разных участков объекта источник 113 рентгеновского излучения может нуждаться в настройке в разные положения относительно детектора 112. Например, чтобы сканировать разные участки пациента, расстояние между источником 113 рентгеновского излучения и детектором 112 может быть различным. В контексте настоящей заявки расстояние между источником 113 рентгеновского излучения и детектором 112 может называться расстоянием от источника до приемника изображения (SID) устройства 110 рентгеновской визуализации.
[0064] Направляющая 115 может содержать одно или более целевых положений для подвесного устройства 116. Подвесное устройство 116 может быть перемещено в одно из целевых положений вручную пользователем или автоматически, посредством устройства управления. В некоторых вариантах осуществления целевое(ые) положение(ия) может (могут) соответствовать расстоянию(иям) SID устройства 110 рентгеновской визуализации. Когда подвесное устройство 116 перемещается в одно из целевых положений, SID устройства 110 рентгеновской визуализации может изменяться до искомого значения, и источник 113 рентгеновского излучения может излучать рентгеновское излучение к объекту в искомом положении. Например, подвесное устройство 116 можно переместить в целевое положение, в котором SID устройства 110 рентгеновской визуализации может быть 1,5 метров. В некоторых вариантах осуществления число целевых положений вдоль направляющей 115 может быть любым подходящим числом. Целевое положение может быть любым подходящим положением на направляющей 115. В некоторых вариантах осуществления целевое(ые) положение(ия) подвесного устройства 116 могут быть параметрами настройки по умолчанию, хранящимися в запоминающем устройстве (например, запоминающем устройстве 150, запоминающем устройстве 390). Дополнительно или качестве альтернативы, целевое(ые) положение(ия) могут устанавливаться вручную пользователем или задаваться одним или более компонентами системы 100 рентгеновской визуализации (например, подсистемой 140 обработки данных) в зависимости от разных ситуаций.
[0065] В некоторых вариантах осуществления направляющая 115 может содержать одну или более контрольных точек, соответствующих целевому положению. Контрольная точка, соответствующая целевому положению, может быть настроена в положении, близком к целевому положению. Например, контрольная точка может быть настроена в любое положение в пределах предварительно заданного расстояния от целевого положения. Предварительно заданное расстояние может быть в диапазоне 10-110 мм. Например, предварительно заданное расстояние может равняться 90 мм, 100 мм или 110 мм. В некоторых вариантах осуществления предварительно заданное расстояние может быть ограничено в поддиапазоне 10-30 мм, 30-50 мм, 50-90 мм или 90-110 мм. Предварительно заданное расстояние может быть параметром умолчания, хранящимся в запоминающем устройстве (например, запоминающем устройстве 150, запоминающем устройстве 390). Дополнительно или в качестве альтернативы, предварительно заданное расстояние может устанавливаться или настраиваться пользователем или одним или более компонентами системы 100 рентгеновской визуализации (например, подсистемой 140 обработки данных), в зависимости от разных ситуаций.
[0066] В некоторых вариантах осуществления контрольная(ые) точка(и) подвесного устройства 116 могут быть параметрами настройки по умолчанию, хранящимися в запоминающем устройстве (например, запоминающем устройстве 150, запоминающем устройстве 390). Дополнительно или в качестве альтернативы, контрольная(ые) точка(и) могут устанавливаться вручную пользователем или задаваться одним или более компонентами системы 100 рентгеновской визуализации (например, подсистемой 140 обработки данных) в зависимости от разных ситуаций. В некоторых вариантах осуществления контрольная точка, соответствующая целевому положению может быть установлена по предварительно заданному расстоянию посредством, например, модуля 420 определения. Например, модуль 420 определения может назначать одну или более точек на направляющей, расположенных в пределах предварительно заданного расстояния от целевого положения в качестве контрольной(ых) точки(чек), соответствующей(их) целевому положению. Дополнительно или в качестве альтернативы, модуль 420 определения может назначать одну или более точек между целевым положением и текущим положением подвесного устройства 116 и расположенных в пределах предварительно заданного расстояния от целевого положения, в качестве контрольной точки(чек), соответствующей(их) целевому положению.
[0067] Контрольная(ые) точка(и), соответствующая(ие) целевому положению, могут служить основой для определения того, настроено ли подвесное устройство 116 на перемещение в целевое положение. Например, пользователь может перемещать подвесное устройство 116 (или его участок), чтобы переместить подвесное устройство 116 по направляющей 115 в искомое положение. Если пользователь намеревается переместить подвесное устройство 116 в целевое положение, то пользователь должен замедлить скорость перемещения, когда подвесное устройство 116 приближается к целевому положению. Соответственно, если скорость подвесного устройства 116 в контрольной точке, близкой к целевому положению, меньше пороговой скорости, то считается, что подвесное устройство 116 перемещается в целевое положение пользователем.
[0068] В некоторых вариантах осуществления направляющая 115 может содержать множество контрольных точек, соответствующих целевому положению. Множество контрольных точек может располагаться с одной стороны от целевого положения вдоль направляющей 115. Дополнительно или в качестве альтернативы, контрольные точки могут располагаться с разных сторон от целевого положения вдоль направляющей 115. В некоторых вариантах осуществления разные целевые положения могут соответствовать одному и тому же или отличающемуся числу контрольных точек. Дополнительные данные, относящиеся к расположению целевого(ых) положения(ий) и контрольной(ых) точки(чек) вдоль направляющей 115, можно найти в других местах настоящего раскрытия (например, на фиг. 7-9 и в соответствующих описаниях к ним).
[0069] Для наглядности в настоящем раскрытии поясняется в качестве примера управление подвесным устройством 116 на основании первой контрольной точки. Следует отметить, что нижеприведенное описание приведено только для пояснения и не предполагает ограничения объема настоящего изобретения.
[0070] На этапе 510, модуль 410 сбора данных может получать первую скорость подвесного устройства 116 в первой контрольной точке во время перемещения подвесного устройства 116 по направляющей 115. Первая контрольная точка может соответствовать первому целевому положению на направляющей 115. Первая контрольная точка может быть любым положением, близким к первому целевому положению. Например, первая контрольная точка может располагаться в пределах предварительно заданного расстояния от первого целевого положения. В некоторых вариантах осуществления направляющая 115 может содержать одно или более целевых положений и одну или более контрольных точек, соответствующих целевому(ым) положению(ям). Первая контрольная точка может быть контрольной точкой, совсем недавно перейденной подвесным устройством 116 во время его перемещения.
[0071] В некоторых вариантах осуществления модуль 410 сбора данных может получать первую скорость подвесного устройства 116 в первой контрольной точке из одного или более компонентов системы 100 рентгеновской визуализации. Например, в первой контрольной точке на направляющей 115 может быть установлен датчик скорости. Датчик скорости может измерять первую скорость и передавать первую скорость в модуль 410 сбора данных. В качестве другого примера система 100 рентгеновской визуализации может включать в себя позиционный кодовый датчик, выполненный с возможностью кодирования положения подвесного устройства 116 вдоль направляющей 115. Например, позиционный кодовый датчик может измерять расстояние между подвесным устройством 116 и детектором 112. Первую скорость можно определять по расстоянию между подвесным устройством 116 и детектором 112 и периоду времени. Только в качестве примера, первую скорость можно определять по изменению расстояния между подвесным устройством 116 и детектором 112 за период, в течение которого подвесное устройство 116 проходит через первую контрольную точку. Первая скорость может определяться, например, позиционным кодовым датчиком и/или модулем 420 определения и после передаваться в модуль 410 сбора данных.
[0072] В некоторых вариантах осуществления датчик скорости или модуль 420 определения может измерять первую скорость подвесного устройства 116 в первой контрольной точке непрерывно или периодически. Когда датчик скорости или модуль 420 определения обнаруживает, что первая скорость больше 0, датчик скорости или модуль 420 определения может передавать первую скорость в модуль 410 сбора данных. В качестве альтернативы датчик скорости или модуль 420 определения может измерять первую скорость в момент времени, по существу, близкий к моменту, когда подвесное устройство 116 переходит первую контрольную точку, и передавать первую скорость в модуль 410 сбора данных.
[0073] На этапе 520, модуль 420 определения может определять, является ли первая скорость подвесного устройства 116 в первой контрольной точке меньше пороговой скорости. Пороговая скорость может быть параметром по умолчанию, хранящимся в запоминающем устройстве (например, запоминающем устройстве 150, запоминающем устройстве 390). Дополнительно или в качестве альтернативы, пороговая скорость может устанавливаться вручную или определяться одним или более компонентами системы 100 рентгеновской визуализации в зависимости от разных обстоятельств. Пороговая скорость может быть любым положительным значением. Например, пороговая скорость может быть равной 1 мм/с, 10 мм/с, 20 мм/с, 50 мм/с, 100 мм/с или любому подходящему значению. В некоторых вариантах осуществления пороговая скорость может быть в диапазоне 1-100 мм/с. В некоторых вариантах осуществления пороговая скорость может быть ограничена в поддиапазоне 1-10 мм/с, 10-20 мм/с, 20-40 мм/с или 50-100 мм/с.
[0074] В ответ на определение того, что первая скорость подвесного устройства 116 в первой контрольной точке меньше пороговой скорости, процедура 500 может перейти на этап 530. На этапе 530, модуль 430 управления может привести в действие устройство управления, чтобы переместить подвесное устройство 116 в целевое положение, соответствующее первой контрольной точке, (т.е. в первое целевое положение). Под управлением устройством управления, подвесное устройство 116 может автоматически перемещаться в первое целевое положение. В некоторых вариантах осуществления подвесное устройство 116 может перемещаться в первое целевое положение посредством устройства управления с постоянной скоростью. В некоторых вариантах осуществления устройство управления может включать в себя муфту и электродвигатель. Устройство управления может управлять состоянием подвесного устройства 116 посредством муфты и электродвигателя. Дополнительные данные, касающиеся управления подвесным устройством 116 посредством устройства управления, можно найти в другом месте настоящего раскрытия (например, на фиг. 6 и в соответствующем описании к нему).
[0075] Напротив, при определении того, что первая скорость не меньше пороговой скорости, процедура 500 может прекратиться, и подвесное устройство 116 может поддерживаться в его текущем состоянии (например, перемещения вручную пользователем).
[0076] В некоторых вариантах осуществления направляющая 115 может дополнительно содержать вторую контрольную точку. Подвесное устройство 116 может переходить вторую контрольную точку после перехода через первую контрольную точку. Вторая контрольная точка может соответствовать тому же целевому положению, что и первая контрольная точка, или другому целевому положению. Например, вторая контрольная точка также может соответствовать первому целевому положению. Первая и вторая контрольные точки могут располагаться с одной стороны от первого целевого положения. В качестве альтернативы, вторая контрольная точка может соответствовать второму целевому положению. При определении, что первая скорость не меньше пороговой скорости, процедура 500 может перейти на этап 510, чтобы дополнительно получить вторую скорость подвесного устройства 116 во второй контрольной точке во время перемещения подвесного устройства 116 по направляющей 115. На этапе 520 модуль 420 определения может определить, является ли вторая скорость меньше пороговой скорости. В ответ на определение того, что вторая скорость меньше пороговой скорости, процедура 500 может перейти на этап 530. Модуль 430 управления может привести в действие устройство управления, чтобы переместить подвесное устройство 116 в целевое положение, соответствующее второй контрольной точке. Напротив, при определении того, что вторая скорость не меньше пороговой скорости, процедура 500 может прекратиться. В качестве альтернативы, процедура 500 может перейти на этап 510, чтобы получить скорость подвесного устройства 116 в контрольной точке, отличающейся от первой или второй контрольной точке.
[0077] В некоторых вариантах осуществления цикл этапов 510 и 520 может повторяться, пока скорость подвесного устройства 116 в некоторой контрольной точке не оказывается меньше пороговой скорости, или подвесное устройство 116 не переходит все контрольные точки вдоль направляющей 115. Если скорость подвесного устройства 116 в контрольной точке меньше пороговой скорости, то процедура 500 может перейти на этап 530, и модуль 430 управления может привести в действие устройство управления, чтобы переместить подвесное устройство 116 в целевое положение, соответствующее контрольной точке, на этапе 530. Если подвесное устройство 116 переходит все контрольные точки, то процедура 500 может прекратиться.
[0078] Следует отметить, что вышеприведенное описание процедуры 500 дано только с иллюстративной целью и не предполагает ограничения объема настоящего изобретения. После изучения настоящего раскрытия средними специалистами в данной области техники могут быть созданы многочисленные варианты или модификации процедуры 500. Однако данные варианты и модификации не выходят за пределы объема настоящего изобретения. В некоторых вариантах осуществления могут быть добавлены или исключены один или более этапов. Например, подвесное устройство 116 может иметь одно или более рабочих состояний и изменять свое рабочее состояние во время исполнения процедуры 500. Дополнительные данные, касающиеся рабочего состояния подвесного устройства 116 можно найти в других местах настоящего раскрытия (например, на фиг. 6 и в соответствующем описании к нему).
[0079] Фиг. 6 является блок-схемой последовательности операций, поясняющей примерную процедуру управления подвесным устройством в соответствии с некоторыми вариантами осуществления настоящего изобретения. В некоторых вариантах осуществления одна или более операций процедуры 600, показанной на фиг. 6, для управления подвесным устройством могут быть реализованы в системе 100 рентгеновской визуализации, показанной на фиг. 1. Например, процедура 600, показанная на фиг. 6, может храниться в запоминающем устройстве 150 в форме команд и вызываться и/или выполняться подсистемой 140 обработки данных (например, процессором 210 компьютерного устройства 200, показанного на фиг. 2, устройством CPU 340 мобильного устройства 300, показанного на фиг. 3).
[0080] В некоторых вариантах осуществления подвесное устройство 116 может иметь множество рабочих состояний, и процедура 600 является вариантом осуществления процедуры 500. Рабочее состояние подвесного устройства 116 может изменяться во время его перемещения по направляющей 115. Примерные рабочие состояния подвесного устройства 116 могут включать в себя, но без ограничения, фиксированное состояние, состояние ручного перемещения, состояние автоматического перемещения или что-то подобное, или любую их комбинацию. В фиксированном состоянии подвесное устройство 116 может быть зафиксированным с направляющей 115 и неподвижным. В состоянии ручного перемещения подвесное устройство 116 может перемещаться пользователем по направляющей 115. В состоянии автоматического перемещения подвесное устройство 116 может автоматически перемещаться по направляющей 115 посредством, например, электродвигателя (т.е. компонента устройства управления).
[0081] В некоторых вариантах осуществления рабочее состояние подвесного устройства 116 может быть управляемым устройством управления. Устройство управления может включать в себя муфту и электродвигатель. Подвесное устройство 116 может действовать в фиксированном состоянии, когда муфта замкнута, а электродвигатель выключен. Подвесное устройство 116 может действовать в состоянии ручного перемещения, когда муфта разомкнута, а электродвигатель выключен. Подвесное устройство 116 может действовать в состоянии автоматического перемещения, когда муфта замкнута, а электродвигатель включен. Следует отметить, что вышеприведенное описание устройства управления дано только с иллюстративной целью и не предполагает ограничения объема настоящего изобретения. Устройство управления может включать в себя любую комбинацию механизмов для реализации его функций. Только в качестве примера, устройство управления может включать в себя тормоз и электродвигатель. Подвесное устройство 116 может действовать в фиксированном состоянии, когда тормоз включен, и электродвигатель выключен. Подвесное устройство 116 может действовать в состоянии ручного перемещения, когда тормоз выключен, и электродвигатель выключен. Подвесное устройство 116 может действовать в состоянии автоматического перемещения, когда тормоз выключен, и электродвигатель включен. Для наглядности, в настоящем раскрытии рассматривается примерное устройство управления, включающее в себя муфту и электродвигатель.
[0082] На этапе 610 модуль 410 сбора данных может получить запрос на снятие фиксации подвесного устройства 116. Подвесное устройство 116 может действовать в фиксированном состоянии в его исходном положении на направляющей 115. Исходное положение на направляющей 115 может быть любым положением на направляющей 115. Например, исходное положение может быть одним из двух конечных точек направляющей 115. В некоторых вариантах осуществления муфта может быть замкнута, а электродвигатель может быть выключен, когда подвесное устройство 116 находится в его исходном положении, чтобы блокировать подвесное устройство 116 от перемещения.
[0083] В некоторых вариантах осуществления модуль 410 сбора данных может получать запрос от пользователя при посредстве одного или более компонентов системы 100 рентгеновской визуализации, например, с терминала 130 или панели управления, установленной на подвесном устройстве 116. Только в качестве примера, интерфейс панели управления, установленной на подвесном устройстве 116, может включать в себя один или более элементов интерфейса (например, клавиш), выполненных с возможностью управления рабочими состояниями подвесного устройства 116. Пользователь может инициировать запрос, например, щелчком или нажатием клавиши, чтобы снять фиксацию подвесного устройства 116. В некоторых вариантах осуществления пользователь может щелкнуть по клавише, чтобы разомкнуть муфту, и чтобы можно было снять фиксацию подвесного устройства 116. Когда подвесное устройство 116 не зафиксировано, пользователь может перемещать вручную подвесное устройство 116.
[0084] На этапе 620 модуль 430 управления может привести в действие устройство управления, чтобы перевести подвесное устройство 116 из фиксированного состояния в состояние ручного перемещения. Например, устройство управления может разомкнуть муфту, чтобы перевести подвесное устройство 116 из фиксированного состояния в состояние ручного перемещения. Электродвигатель устройства управления может поддерживаться в выключенном состоянии.
[0085] На этапе 630 модуль 410 сбора данных может получать, во время перемещения подвесного устройства 116 по направляющей 115, первую скорость подвесного устройства 116 в первой контрольной точке. На этапе 640 модуль 420 определения может определить, является ли первая скорость подвесного устройства 116 в первой контрольной точке меньше пороговой скорости. Этапы 630 и 640 могут выполняться подобно этапам 510 и 520, соответственно, и их подробные описания здесь не повторяются.
[0086] При определении того, что первая скорость подвесного устройства в первой контрольной точке меньше пороговой скорости, процедура 600 может перейти на этап 650. На этапе 650 модуль 430 управления может привести в действие устройство управления, чтобы перевести подвесное устройство 116 из состояния ручного перемещения в состояние автоматического перемещения. В некоторых вариантах осуществления устройство управления может замкнуть муфту и включить электродвигатель, чтобы перевести подвесное устройство 116 из состояния ручного перемещения в состояние автоматического перемещения.
[0087] На этапе 660 модуль 430 управления может привести в действие устройство управления, чтобы переместить подвесное устройство в целевое положение, соответствующее первой контрольной точке. В некоторых вариантах осуществления подвесное устройство 116 может быть перемещено электродвигателем устройства управления от первой контрольной точки в целевое положение, соответствующее первой контрольной точке.
[0088] На этапе 670 модуль 430 управления может привести в действие устройство управления, чтобы перевести подвесное устройство из состояния автоматического перемещения в фиксированное состояние в целевом положении. В некоторых вариантах осуществления, когда подвесное устройство 116 приходит в целевое положение, устройство управления может выключить электродвигатель, чтобы перевести подвесное устройство из состояния автоматического перемещения в фиксированное состояние. Муфта устройства управления может поддерживаться в замкнутом состоянии.
[0089] На вышеописанном этапе 640 в ответ на определение того, что первая скорость подвесного устройства в первой контрольной точке не меньше пороговой скорости, процедура 600 может прекращаться, и подвесное устройство 116 может по-прежнему действовать в состоянии ручного перемещения. В некоторых вариантах осуществления направляющая 115 может включать в себя одну или более других контрольных точек. Этапы 630 и 640 могут выполняться циклически, пока скорость подвесного устройства 116 в некоторой контрольной точке не оказывается меньше пороговой скорости, или подвесное устройство 116 не переходит все контрольные точки вдоль направляющей 115. Если скорость подвесного устройства 116 в контрольной точке меньше пороговой скорости, то процедура 600 может перейти на этап 650. На этапе 650 модуль 430 управления может привести в действие устройство управления, чтобы перевести подвесное устройство 116 из состояния ручного перемещения в состояние автоматического перемещения. На этапе 660 модуль 430 управления может привести в действие устройство управления, чтобы переместить подвесное устройство в целевое положение, соответствующее контрольной точке. На этапе 670, модуль 430 управления может привести в действие устройство управления, чтобы перевести подвесное устройство из состояния автоматического перемещения в фиксированное состояние, когда подвесное устройство 116 приходит в целевое положение, соответствующее контрольной точке. Если подвесное устройство 116 переходит все контрольные точки, процедура 600 может прекратится. Цикл этапов 630 и 640 может быть подобен циклу этапов 510 и 520, и его подробное описание не повторяется.
[0090] Следует отметить, что вышеприведенное описание процедуры 600 дано только с иллюстративной целью и не предполагает ограничения объема настоящего изобретения. После изучения настоящего раскрытия средними специалистами в данной области техники могут быть созданы многочисленные варианты или модификации процедуры 600. Однако данные варианты и модификации не выходят за пределы объема настоящего изобретения. В некоторых вариантах осуществления могут быть добавлены или исключены один или более этапов. Например, этапы 610 и 620 можно объединить в один этап. В качестве другого примера, можно объединить этапы 650 и 660 в один этап. В качестве еще одного примера, подвесное устройство 116 может действовать в состоянии ручного перемещения в исходном положении, и пользователь может непосредственно перемещать подвесное устройство 116 по направляющей 115. Этапы 610 и 620 могут отсутствовать.
[0091] Фиг. 7 является схематическим изображением, поясняющим примерное SID устройства 110 рентгеновской визуализации в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на фиг. 7, устройство 110 рентгеновской визуализации может включать в себя опору 111, детектор 112, направляющую 115 и подвесное устройство 116.
[0092] Подвесное устройство 116 может включать в себя источник 113 рентгеновского излучения и быть подвешенным с направляющей 115. Подвесное устройство 116 может быть перемещаемым и выполненным с возможностью перемещения по направляющей 115. Источник 113 рентгеновского излучения может перемещаться вместе с подвесным устройством 116, и SID (т.е. расстояние между источником 113 рентгеновского излучения и детектором 112) устройства 110 рентгеновской визуализации может изменяться. Как показано на фиг. 7, подвесное устройство 116 можно переместить из положения C в положение B по направляющей 115, и SID устройства 110 рентгеновской визуализации может измениться от SID3 до SID2. Подвесное устройство 116 можно переместить из положения B в положение A по направляющей 115, и SID устройства 110 рентгеновской визуализации может измениться от SID2 до SID1. В некоторых вариантах осуществления SID может быть разным, когда устройство 110 рентгеновской визуализации сканирует разные объекты или разные участки объекта. Подвесное устройство 116 можно переместить в искомое положение, чтобы SID устройства 110 рентгеновской визуализации могло измениться до искомого значения.
[0093] Фиг. 8 является схематическим изображением, поясняющим примерное расположение целевых положений и контрольных точек на направляющей 115 устройства 110 рентгеновской визуализации в соответствии с некоторыми вариантами осуществления настоящего изобретения. Как показано на фиг. 8, направляющая 115 содержит целевое положение T2, контрольную точку P2, соответствующую целевому положению T2, целевое положение T3 и контрольную точку P3, соответствующую целевому положению T3. Подвесное устройство 116 располагается в исходном положении P1 на направляющей 115 и перемещается пользователем в сторону детектора 112, как указано стрелкой на фиг. 8.
[0094] Когда подвесное устройство 116 переходит контрольную точку, может быть инициирована или выполняться процедура 500 или 600 для управления перемещением подвесного устройства 116. Например, модуль 410 сбора данных может получать скорость подвесного устройства 116 в контрольной точке P2 в момент или время, по существу, близкое к моменту, когда подвесное устройство 116 переходит контрольную точку P2. Модуль 420 определения может определять, является ли скорость подвесного устройства 116 в контрольной точке P2 меньше пороговой скорости. В ответ на определение того, что скорость в контрольной точке P2 меньше пороговой скорости, модуль 430 управления может привести в действие устройство управления, чтобы переместить подвесное устройство 116 из контрольной точки P2 в соответствующую целевое положение T2.
[0095] Напротив, при определении того, что скорость в контрольной точке P2 не меньше пороговой скорости, подвесное устройство 116 может поддерживаться в состоянии перемещения пользователем по направляющей 115. Например, подвесное устройство 116 может перемещаться пользователем и переходить контрольную точку P3. Аналогично можно получать и анализировать скорость подвесного устройства 116 в контрольной точке P3. Если скорость в контрольной точке P3 меньше пороговой скорости, то модуль 430 управления может привести в действие устройство управления, чтобы переместить подвесное устройство 116 из контрольной точки P3 в соответствующее целевое положение SID3.
[0096] Фиг. 9 является схематическим изображением, поясняющим примерное расположение целевого положения и контрольных точек на направляющей 115 устройства 110 рентгеновской визуализации в соответствии с некоторыми вариантами осуществления настоящего изобретения. В некоторых вариантах осуществления направляющая 115 может содержать множество контрольных точек, соответствующих целевому положению. По меньшей мере одна из контрольных точек может располагаться с одной стороны от целевого положения и по меньшей мере одна из контрольных точек может располагаться с другой стороны от целевого положения вдоль направляющей 115. Например, как показано на фиг. 9, направляющая 115 может содержать целевое положение T и две контрольных точки P и P', соответствующие целевому положению T. Контрольная точка P и контрольная точка P' располагаются с разных сторон от целевого положения T.
[0097] В некоторых вариантах осуществления контрольная точка P может быть любым положением, расположенным в области [a, b] на направляющей 115, и контрольная точка P' может быть любым положением, расположенной в области [c, d] на направляющей 115. Для наглядности, расстояние между целевым положением T и детектором 112 может быть 1,5 метров. Расстояние между контрольной точкой P' и детектором 112 может быть в диапазоне [1,4 м, 1,45 м], и расстояние между контрольной точкой P и детектором 112 может быть в диапазоне [1,55 м, 1,6 м].
[0098] В некоторых вариантах осуществления контрольная точка может определяться по направлению перемещения подвесного устройства 116. Например, когда подвесное устройство 116 перемещается в направлении детектора 112 (как указано стрелкой AB), модуль 420 определения может определить контрольную точку P в качестве контрольной точки, соответствующей целевому положению T. Когда подвесное устройство 116 перемещается далеко от детектора 112 (как указано стрелкой CD), модуль 420 определения может определить контрольную точку P' в качестве контрольной точки, соответствующей целевому положению T.
[0099] Следует отметить, что примеры, показанные на фиг. 8 и 9, приведены исключительно с целью пояснения и не предполагают ограничения объема настоящего изобретения. После изучения настоящего раскрытия средними специалистами в данной области техники могут быть созданы многочисленные варианты или модификации. Однако данные варианты и модификации не выходят за пределы объема настоящего изобретения. Например, направляющая 115 может содержать любое число контрольных точек и целевых положений. Контрольная(ые) точка(и) и целевое(ые) положение(ия) могут быть расположены в любом положении на направляющей 115.
[0100] Из вышеописанных базовых концепций и после прочтения настоящего подробного раскрытия, специалистам может быть совершенно очевидно, что вышеприведенное подробное раскрытие предназначено только для примера, а не ограничения. Специалистами могут быть созданы различные изменения, усовершенствования и модификации, не изложенные в явном виде в настоящей заявке. Предполагается, что данные изменения, усовершенствования и модификации должны быть подсказаны настоящим раскрытием и находятся в пределах существа и объема примерных вариантов осуществления из настоящего раскрытия.
[0101] Кроме того, для описания вариантов осуществления настоящего изобретения применяется определенная терминология. Например, термины «один вариант осуществления», «вариант осуществления» и/или «некоторые варианты осуществления» означают, что конкретные признак, конструкция или характеристика, описанные в связи с вариантом осуществления, содержатся в по меньшей мере одном варианте осуществления настоящего изобретения. Поэтому, необходимо подчеркнуть и следует понимать, что по меньшей мере две ссылки на «вариант осуществления» или «один вариант осуществления», «альтернативный вариант осуществления» в различных местах настоящего описания не обязательно все относятся к одному и тому же варианту осуществления. Кроме того, конкретные признаки, конструкции или характеристики можно объединять подходящим образом в одном или более вариантов осуществления настоящего изобретения.
[0102] Кроме того, специалистам должно быть ясно, что аспекты настоящего изобретения могут поясняться и характеризоваться в настоящей заявке в любых из нескольких патентуемых категорий или контексте, включая любые новые и полезные способ, устройство, производство или химическое соединение или любое их новое и полезное усовершенствование. Соответственно, аспекты настоящего изобретения могут быть реализованы полностью в аппаратном обеспечении, полностью в программном обеспечении (включая аппаратно-программное обеспечение, резидентное программное обеспечение, микрокод и т.п.) или в виде гибридной программной и аппаратной реализации, которые могут называться все в настоящей заявке, в общем, как «компонент», «модуль» или «система». Кроме того, аспекты настоящего изобретения могут быть в форме компьютерного программного продукта, воплощенного в виде одного или более машиночитаемых носителей, содержащих машиночитаемый программный код, встроенном на носителе.
[0103] Машиночитаемый носитель сигнала может включать в себя передаваемый информационный сигнал с машиночитаемым программным кодом, вложенным в него, например, в основной полосе частот или в виде части несущей волны. Такой передаваемый сигнал может иметь различные формы, включая электромагнитную, оптическую и подобные формы, или любое их подходящее сочетание. Машиночитаемый носитель сигнала может быть любым машиночитаемым носителем, который не является машиночитаемым носителем данных, и который может передавать, распространять или транспортировать программу для использования выполняющей команды системой, аппаратурой или устройством или в связи с ними. Программный код, реализованный на машиночитаемом носителе сигнала, может передаваться с использованием любого подходящей среды, включая беспроводной канал, проводную линию, волоконно-оптический кабель, радиоволны или что-то подобное, или любую подходящую комбинацию вышеприведенных сред.
[0104] Компьютерный программный код для выполнения операций согласно аспектам настоящего изобретения может быть записан в любой комбинации одного или более языков программирования, включая объектно-ориентированный язык программирования, такой как Java, Scala, Smalltalk, Eiffel, JADE, Emerald, C++, C#, VB. NET, Python или что-то подобное, обычные языки процедурного программирования, такие как язык программирования «C», Visual Basic, Fortran 2103, Perl, COBOL 2102, PHP, ABAP, языки динамического программирования, такие как Python, Ruby и Groovy, или другие языки программирования. Программный код может выполняться полностью в компьютере пользователя, частично в компьютере пользователя, в качестве автономного программного пакета, частично в компьютере пользователя и частично в удаленном компьютере или на сервере. В последнем сценарии удаленный компьютер может быть подключен к компьютеру пользователя по сети любого типа, включая локальную сеть (LAN) или глобальную сеть (WAN), или соединение может быть выполнено с внешним компьютером (например, по сети Интернет с помощью провайдера Интернет-сервиса) или в облачной вычислительной среде, или обеспечено в форме такого сервиса, как программное обеспечение как услуга (SaaS).
[0105] Кроме того, перечисленный порядок процессорных элементов или последовательностей обработки, или, по этой причине, применение числовых, буквенных или других обозначений не предполагает ограничения заявленных процедур и способов каким-либо порядком, кроме того, как может быть указано в формуле изобретения. Хотя вышеприведенное раскрытие содержит описание множества различных примеров, которые считаются в настоящее время множеством полезных вариантов осуществления изобретения, следует понимать, что такие подробные сведения служат исключительно данной цели, и что прилагаемая формула изобретения не ограничена раскрытыми вариантами осуществления, но, напротив, предназначена для охвата модификаций и эквивалентных схем, которые находятся в пределах существа и объема раскрытых вариантов осуществления. Например, хотя различные вышеописанные компоненты могут быть осуществлены в аппаратном устройстве, их можно также реализовать как только программное решение, например, установленное на существующем сервере или мобильном устройстве.
[0106] Аналогично, следует понимать, что в вышеприведенном описании вариантов осуществления настоящего изобретения различные признаки иногда сгруппированы в одном варианте осуществления, на одной фигуре или в их описании, чтобы рационализировать раскрытие, способствующее пониманию одного или более из различных вариантов осуществления изобретения. Однако данный способ раскрытия нельзя интерпретировать как отражающий идею, что заявленный предмет изобретения требует больше признаков, чем явно перечислено в каждом пункте формулы изобретения. Напротив, варианты осуществления изобретения содержат меньше признаков, чем все признаки одного раскрытого выше варианта осуществления.
[0107] В некоторых вариантах осуществления числа, выражающие количества или свойства, используемые для описания и формулировки некоторых вариантов осуществления изобретения, следует понимать как измененные в некоторых случаях выражением «около», «приблизительно» или «по существу». Например, «около», «приблизительно» или «по существу» может означать±20% разброс значения, которое оно описывает, если не оговорено иное. Соответственно, в некоторых вариантах осуществления численные параметры, приведенные в описании и прилагаемой формуле изобретения, являются приближенными значениями, которые могут изменяться в зависимости от искомых свойств, которые должны обеспечиваться конкретным вариантом осуществления. В некоторых вариантах осуществления численные параметры следует интерпретировать с учетом числа сообщаемых значащих цифр и с применением обычных методов округления. Независимо от того, что численные диапазоны и параметры, устанавливающие широкий объем некоторых вариантов осуществления изобретения, являются приближениями, численные значения, изложенные в конкретных примерах, сообщаются, по возможности, точно.
[0108] Каждые из патентов, патентных заявок, публикаций патентных заявок и других информационных материалов, например, статей, книг, спецификаций, публикаций, документов, фактов и/или чего-то подобного, упомянутых в настоящей заявке, включены в нее по ссылке в полном объеме во всех отношениях, за исключением любых материалов делопроизводства по заявке, связанных с ними, любых из них, которые не соответствуют или противоречат настоящему документу, или любых из них, которые могут ограничивать широкий охват формулы изобретения в настоящее время или впоследствии, соответствующий настоящему документу. Например, если имеет место любое несоответствие или противоречие между описанием, определением и/или применением термина, связанного с любым из включенных информационных материалов и относящегося к настоящему документу, то должно преобладать описание, определение и/или применение термина в настоящем документе.
[0109] В заключение следует понимать, что раскрытые здесь варианты осуществления изобретения поясняют принципы вариантов осуществления изобретения. Другие модификации, которые можно использовать, могут быть в пределах объема изобретения. Таким образом, например, но без ограничения, можно использовать альтернативные конфигурации вариантов осуществления изобретения в соответствии с изложенными здесь идеями. Соответственно, варианты осуществления настоящего изобретения не ограничены в точности теми, которые показаны и описаны.
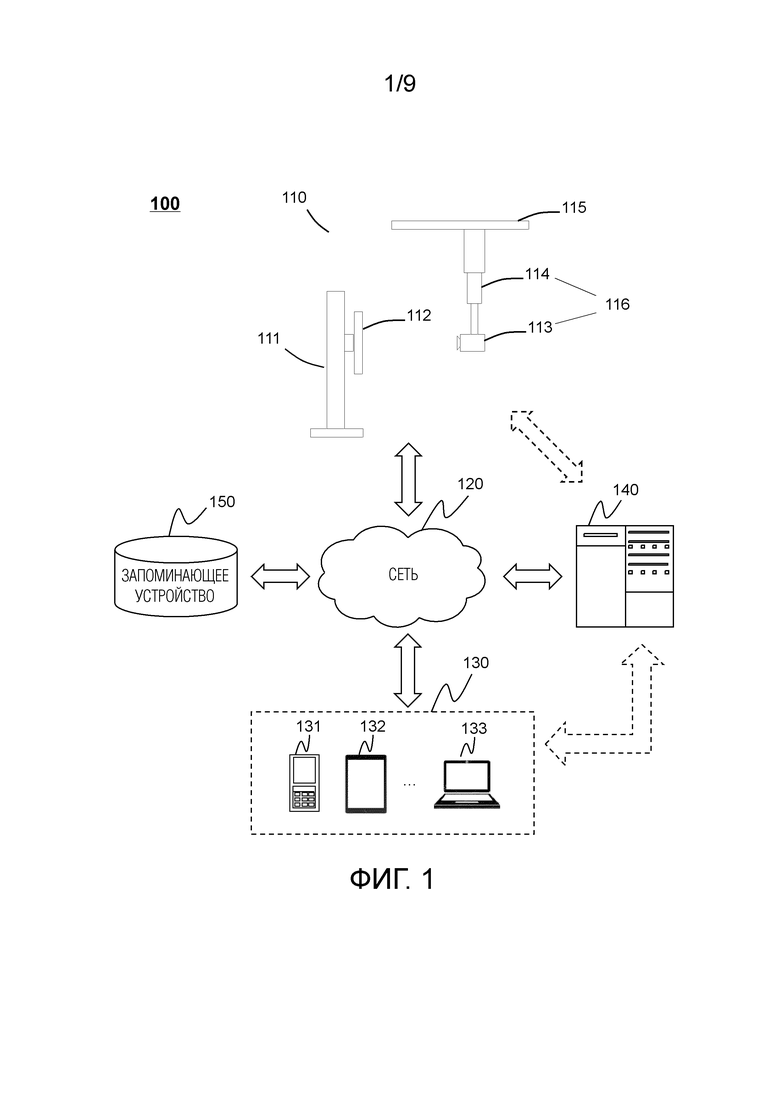
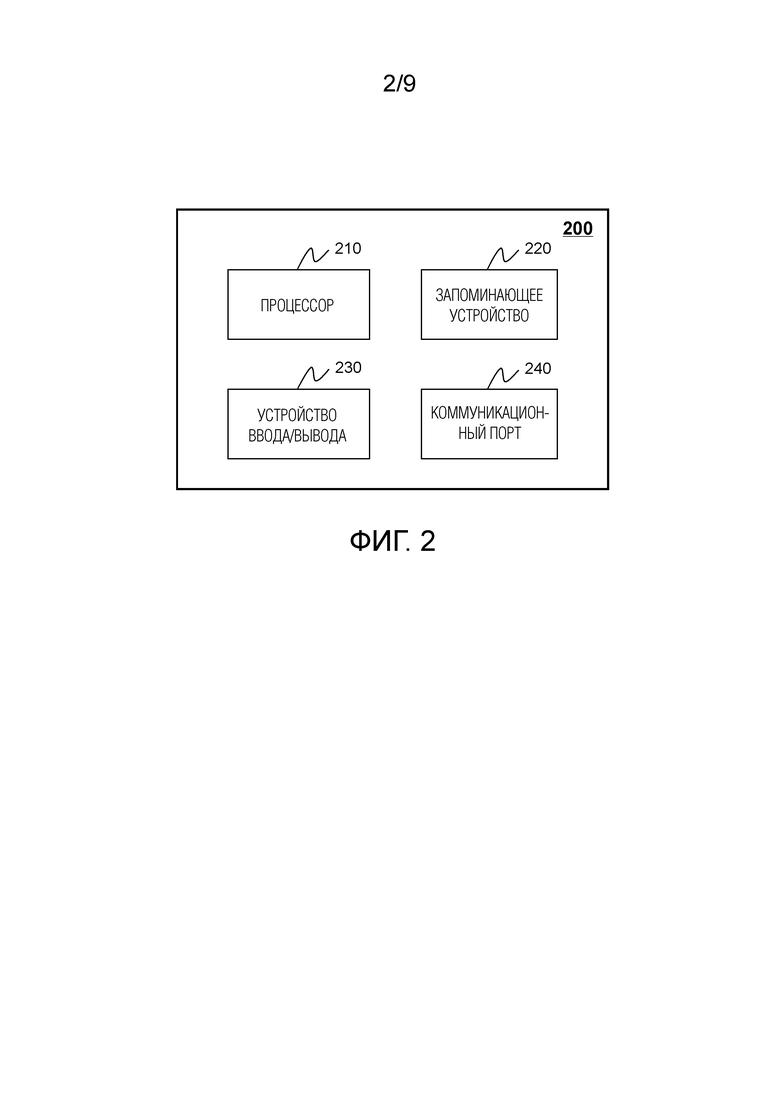
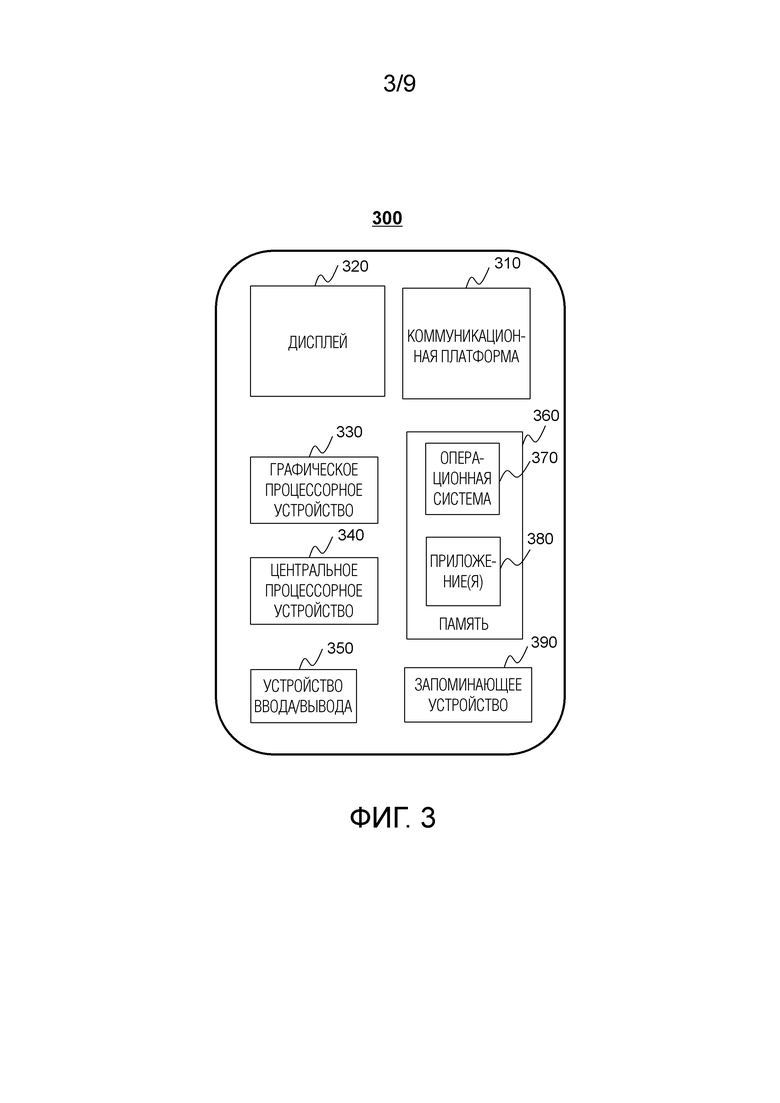
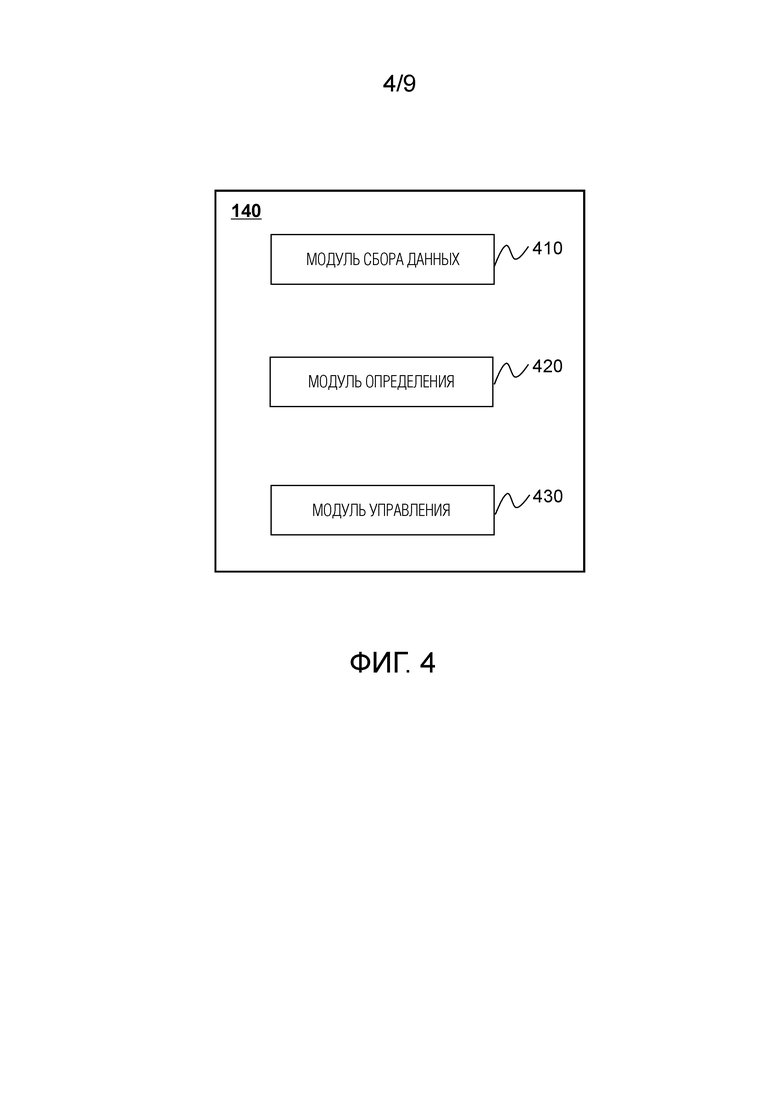
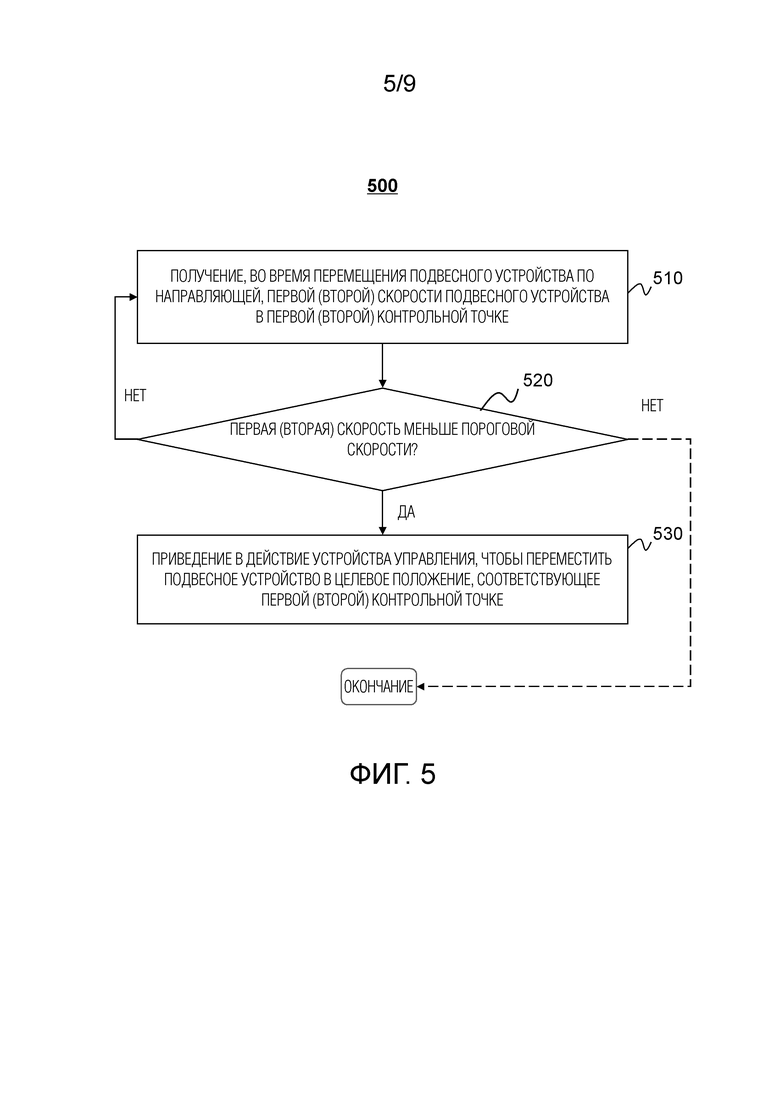
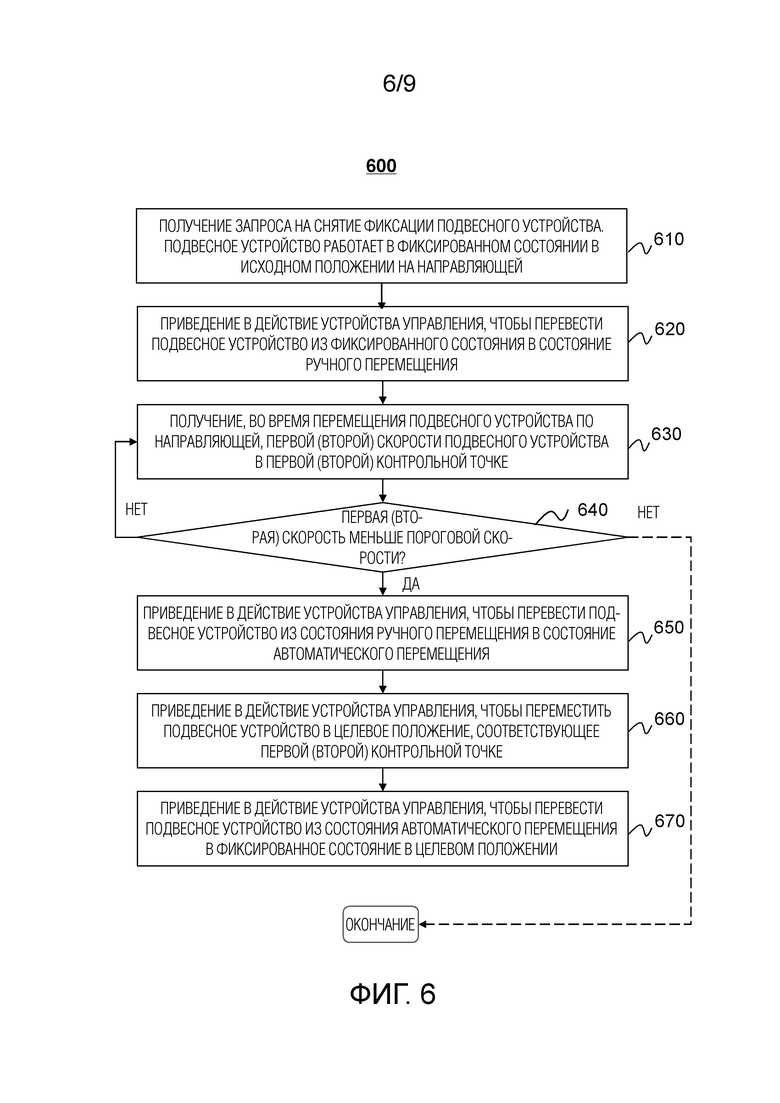
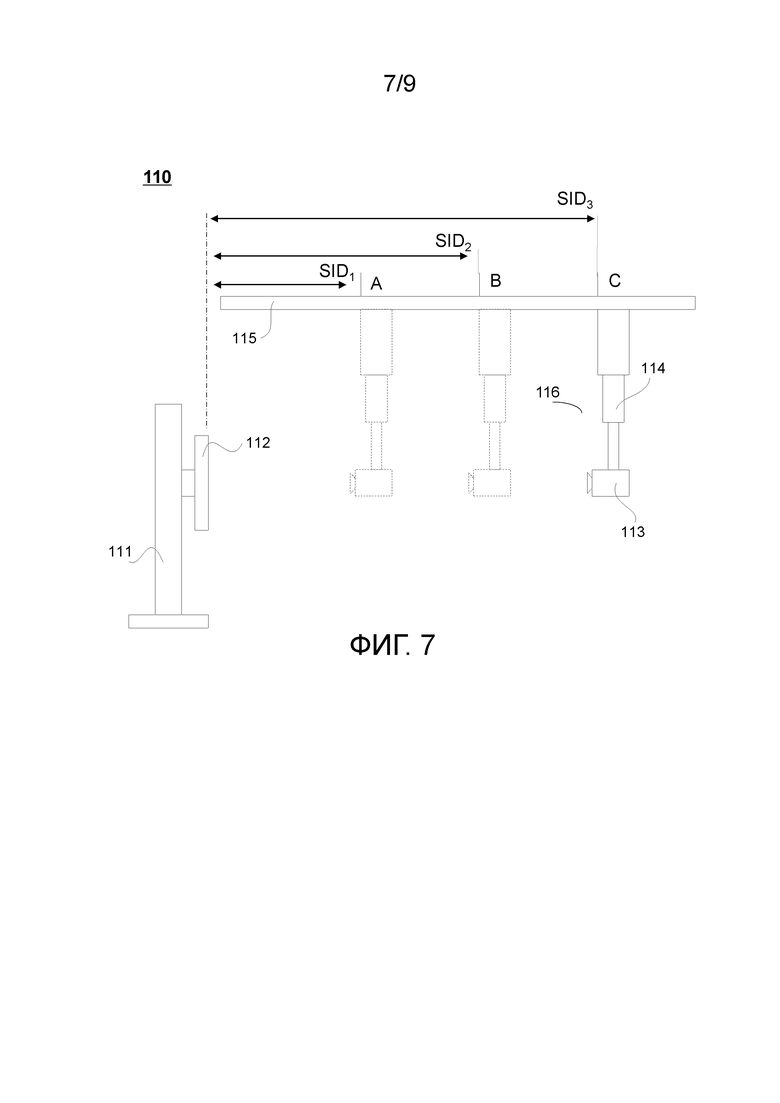
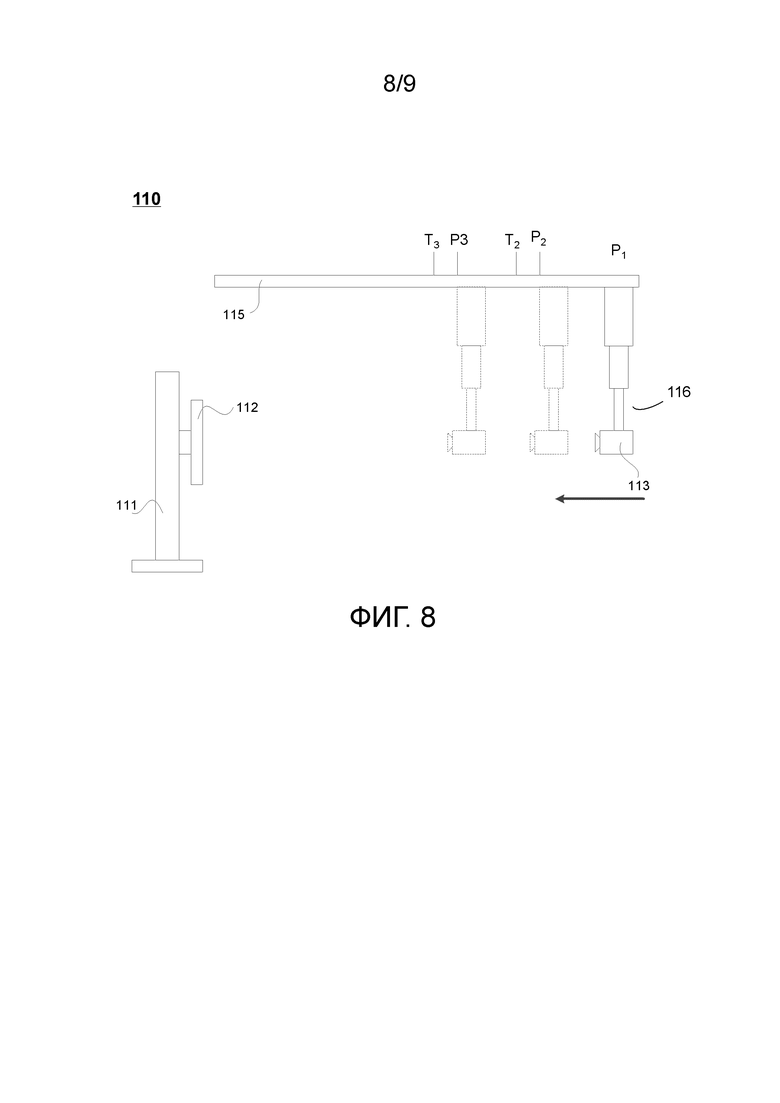
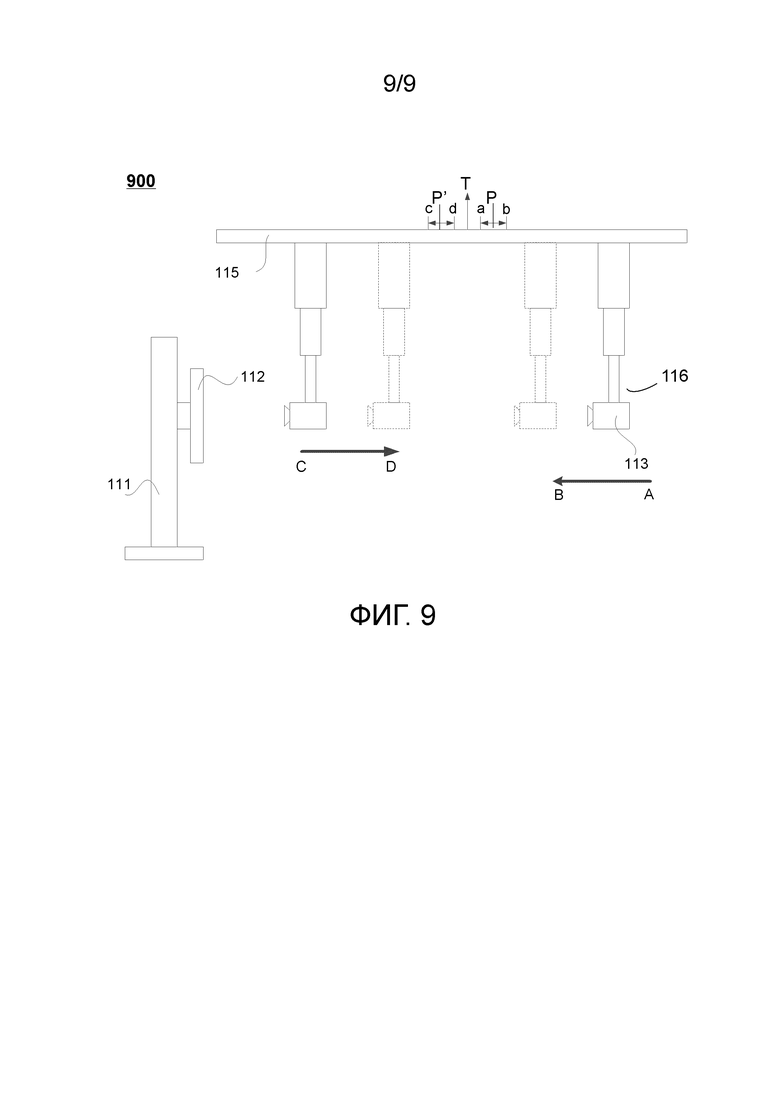
Изобретение относится к медицинской технике. Система для контроля устройства рентгеновской визуализации содержит: устройство рентгеновской визуализации, содержащее подвесное устройство, причем подвесное устройство содержит источник рентгеновского излучения и подвешено с направляющей, при этом подвесное устройство является перемещаемым по направляющей, а направляющая имеет первое целевое положение и первую контрольную точку, причем первая контрольная точка соответствует первому целевому положению, устройство управления, выполненное с возможностью управления подвесным устройством, запоминающее устройство, хранящее набор команд для управления подвесным устройством; и по меньшей мере один процессор, выполненный с возможностью связи с запоминающим устройством. Причем при выполнении набора команд упомянутый по меньшей мере один процессор выполнен с возможностью заставлять систему: определять первую контрольную точку, соответствующую первому целевому положению на направляющей, при этом расстояние между первой контрольной точкой и первым целевым положением меньше предварительно заданного расстояния, получать во время перемещения подвесного устройства по направляющей первую скорость подвесного устройства в первой контрольной точке, определять, является ли первая скорость подвесного устройства в первой контрольной точке меньшей пороговой скорости, и в ответ на определение того, что первая скорость подвесного устройства в первой контрольной точке меньше пороговой скорости, приводить в действие устройство управления для перемещения подвесного устройства в первое целевое положение. Способ контроля устройства рентгеновской визуализации, реализуемый в компьютерном устройстве, имеющем один или более процессоров и один или более носителей данных, устройство рентгеновской визуализации, содержащее подвесное устройство, причем подвесное устройство содержит источник рентгеновского излучения и подвешено с направляющей, при этом подвесное устройство является перемещаемым по направляющей, а направляющая имеет первое целевое положение и первую контрольную точку, причем первая контрольная точка соответствует первому целевому положению. Способ содержит: определение первой контрольной точки, соответствующей первому целевому положению на направляющей, при этом расстояние между первой контрольной точкой и первым целевым положением меньше предварительно заданного расстояния, получение во время перемещения подвесного устройства по направляющей первой скорости подвесного устройства в первой контрольной точке на направляющей, определение того, является ли первая скорость подвесного устройства в первой контрольной точке меньшей пороговой скорости, и в ответ на определение того, что первая скорость подвесного устройства в первой контрольной точке меньше пороговой скорости, приведение в действие устройства управления для перемещения подвесного устройства в первое целевое положение. Невременный машиночитаемый носитель данных, хранящий команды для контроля устройства рентгеновской визуализации, которые, будучи исполняемыми по меньшей мере одним процессором системы, заставляют эту систему выполнять способ. Технический результат заявленного изобретения состоит в повышении эффективности перемещения источника рентгеновского излучения устройства рентгеновской визуализации в целевое положение. 3 н. и 22 з.п. ф-лы, 9 ил.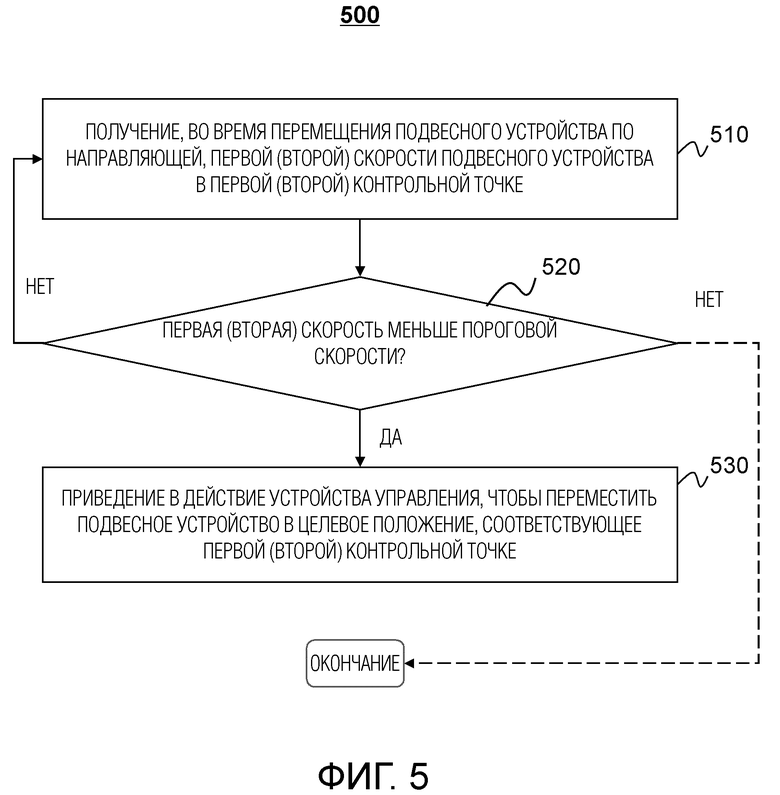
1. Система для контроля устройства рентгеновской визуализации, содержащая:
устройство рентгеновской визуализации, содержащее подвесное устройство, причем подвесное устройство содержит источник рентгеновского излучения и подвешено с направляющей, при этом подвесное устройство является перемещаемым по направляющей, а направляющая имеет первое целевое положение и первую контрольную точку, причем первая контрольная точка соответствует первому целевому положению;
устройство управления, выполненное с возможностью управления подвесным устройством;
запоминающее устройство, хранящее набор команд для управления подвесным устройством; и
по меньшей мере один процессор, выполненный с возможностью связи с запоминающим устройством, причем при выполнении набора команд упомянутый по меньшей мере один процессор выполнен с возможностью заставлять систему:
определять первую контрольную точку, соответствующую первому целевому положению на направляющей, при этом расстояние между первой контрольной точкой и первым целевым положением меньше предварительно заданного расстояния;
получать во время перемещения подвесного устройства по направляющей первую скорость подвесного устройства в первой контрольной точке;
определять, является ли первая скорость подвесного устройства в первой контрольной точке меньшей пороговой скорости; и
в ответ на определение того, что первая скорость подвесного устройства в первой контрольной точке меньше пороговой скорости, приводить в действие устройство управления для перемещения подвесного устройства в первое целевое положение.
2. Система по п. 1, причем:
подвесное устройство имеет фиксированное состояние и состояние ручного перемещения, при этом в фиксированном состоянии подвесное устройство выполнено фиксируемым на направляющей, в состоянии ручного перемещения подвесное устройство выполнено перемещаемым пользователем вручную,
подвесное устройство работает в фиксированном состоянии в исходном положении подвесного устройства на направляющей, и
упомянутый по меньшей мере один процессор дополнительно выполнен с возможностью заставлять систему:
получать запрос на снятие фиксации подвесного устройства; и
приводить в действие устройство управления, чтобы перевести подвесное устройство из фиксированного состояния в состояние ручного перемещения.
3. Система по п. 2, причем:
подвесное устройство дополнительно имеет состояние автоматического перемещения, при этом в состоянии автоматического перемещения подвесное устройство выполнено перемещаемым устройством управления; и
для приведения в действие устройства управления для перемещения подвесного устройства в первое целевое положение упомянутый по меньшей мере один процессор дополнительно выполнен с возможностью заставлять систему:
приводить в действие устройство управления, чтобы перевести подвесное устройство из состояния ручного перемещения в состояние автоматического перемещения.
4. Система по п. 3, причем упомянутый по меньшей мере один процессор дополнительно выполнен с возможностью заставлять систему:
приводить в действие устройство управления, чтобы перевести подвесное устройство из состояния автоматического перемещения в фиксированное состояние в первом целевом положении.
5. Система по п. 3 или 4, причем:
устройство управления содержит муфту и электродвигатель,
подвесное устройство работает в фиксированном состоянии, когда муфта замкнута, а электродвигатель выключен,
подвесное устройство работает в состоянии ручного перемещения, когда муфта разомкнута, а электродвигатель выключен, и
подвесное устройство работает в состоянии автоматического перемещения, когда муфта замкнута, а электродвигатель включен.
6. Система по любому из пп. 2-5, причем:
направляющая дополнительно содержит второе целевое положение и вторую контрольную точку, при этом вторая контрольная точка соответствует второму целевому положению, и
упомянутый по меньшей мере один процессор выполнен с возможностью заставлять систему:
в ответ на определение того, что первая скорость подвесного устройства в первой контрольной точке не меньше пороговой скорости, поддерживать подвесное устройство в состоянии ручного перемещения;
получать во время перемещения подвесного устройства по направляющей вторую скорость подвесного устройства во второй контрольной точке;
определять, является ли вторая скорость подвесного устройства во второй контрольной точке меньше пороговой скорости; и
в ответ на определение того, что вторая скорость подвесного устройства во второй контрольной точке меньше пороговой скорости, приводить в действие устройство управления для перемещения подвесного устройства во второе целевое положение.
7. Система по любому из пп. 1-6, причем:
направляющая содержит множество первых контрольных точек, соответствующих первому целевому положению, и
по меньшей мере одна из упомянутого множества первых контрольных точек располагается с одной стороны от первого целевого положения и по меньшей мере одна из упомянутого множества первых контрольных точек располагается с другой стороны от первого целевого положения вдоль направляющей.
8. Система по любому из пп. 1-7, причем устройство управления включает компонент для приведения в движение и компонент для торможения, причем компонент для приведения в движение устройства управления включен, а компонент для торможения выключен, когда устройство управления перемещает подвесное устройство в первое целевое положение.
9. Система по любому из пп. 1-8, причем предварительно заданное расстояние меньше 90 мм, 100 мм или 110 мм.
10. Система по любому из пп. 1-9, причем первое целевое положение связано с расстоянием от источника до приемника изображения (SID) устройства рентгеновской визуализации.
11. Способ контроля устройства рентгеновской визуализации, реализуемый в компьютерном устройстве, имеющем один или более процессоров и один или более носителей данных, устройство рентгеновской визуализации, содержащее подвесное устройство, причем подвесное устройство содержит источник рентгеновского излучения и подвешено с направляющей, при этом подвесное устройство является перемещаемым по направляющей, а направляющая имеет первое целевое положение и первую контрольную точку, причем первая контрольная точка соответствует первому целевому положению, причем способ содержит:
определение первой контрольной точки, соответствующей первому целевому положению на направляющей, при этом расстояние между первой контрольной точкой и первым целевым положением меньше предварительно заданного расстояния
получение во время перемещения подвесного устройства по направляющей первой скорости подвесного устройства в первой контрольной точке на направляющей;
определение того, является ли первая скорость подвесного устройства в первой контрольной точке меньшей пороговой скорости; и
в ответ на определение того, что первая скорость подвесного устройства в первой контрольной точке меньше пороговой скорости, приведение в действие устройства управления для перемещения подвесного устройства в первое целевое положение.
12. Способ по п. 11, причем:
подвесное устройство имеет фиксированное состояние и состояние ручного перемещения, при этом в фиксированном состоянии подвесное устройство выполнено фиксируемым к направляющей, в состоянии ручного перемещения подвесное устройство выполнено перемещаемым пользователем вручную,
подвесное устройство работает в фиксированном состоянии в исходном положении подвесного устройства на направляющей, и способ дополнительно содержит:
получение запроса на снятие фиксации подвесного устройства; и
приведение в действие устройства управления, чтобы перевести подвесное устройство из фиксированного состояния в состояние ручного перемещения.
13. Способ по п. 12, причем:
подвесное устройство дополнительно имеет состояние автоматического перемещения, при этом в состоянии автоматического перемещения подвесное устройство выполнено перемещаемым устройством управления; и
приведение в действие устройства управления для перемещения подвесного устройства в первое целевое положение дополнительно содержит:
приведение в действие устройства управления, чтобы перевести подвесное устройство из состояния ручного перемещения в состояние автоматического перемещения.
14. Способ по п. 13, дополнительно содержащий:
приведение в действие устройства управления, чтобы перевести подвесное устройство из состояния автоматического перемещения в фиксированное состояние в первом целевом положении.
15. Способ по п. 13 или 14, причем:
устройство управления содержит муфту и электродвигатель,
подвесное устройство работает в фиксированном состоянии, когда муфта замкнута, а электродвигатель выключен,
подвесное устройство работает в состоянии ручного перемещения, когда муфта разомкнута, а электродвигатель выключен, и
подвесное устройство работает в состоянии автоматического перемещения, когда муфта замкнута, а электродвигатель включен.
16. Способ по любому из пп. 12-15, причем:
направляющая дополнительно содержит второе целевое положение и вторую контрольную точку, при этом вторая контрольная точка соответствует второму целевому положению, и способ дополнительно содержит:
в ответ на определение того, что первая скорость подвесного устройства в первой контрольной точке не меньше пороговой скорости, поддерживание подвесного устройства в состоянии ручного перемещения;
получение во время перемещения подвесного устройства по направляющей второй скорости подвесного устройства во второй контрольной точке;
определение того, является ли вторая скорость подвесного устройства во второй контрольной точке меньше пороговой скорости; и
в ответ на определение того, что вторая скорость подвесного устройства во второй контрольной точке меньше пороговой скорости, приведение в действие устройства управления для перемещения подвесного устройства во второе целевое положение.
17. Способ по любому из пп. 11-16, причем:
направляющая содержит множество первых контрольных точек, соответствующих первому целевому положению, и
по меньшей мере одна из упомянутого множества первых контрольных точек располагается с одной стороны от первого целевого положения и по меньшей мере одна из упомянутого множества первых контрольных точек располагается с другой стороны от первого целевого положения вдоль направляющей.
18. Способ по любому из пп. 11-17, причем устройство управления включает компонент для приведения в движение и компонент для торможения, причем компонент для приведения в движение устройства управления включен, а компонент для торможения выключен, когда устройство управления перемещает подвесное устройство в первое целевое положение.
19. Способ по любому из пп. 11-18, причем предварительно заданное расстояние меньше 90 мм, 100 мм или 110 мм.
20. Способ по любому из пп. 11-19, причем первое целевое положение связано с расстоянием от источника до приемника изображения (SID) устройства рентгеновской визуализации.
21. Невременный машиночитаемый носитель данных, хранящий команды для контроля устройства рентгеновской визуализации, которые, будучи исполняемыми по меньшей мере одним процессором системы, заставляют эту систему выполнять способ, причем устройство рентгеновской визуализации содержит подвесное устройство, причем подвесное устройство содержит источник рентгеновского излучения и подвешено с направляющей, при этом подвесное устройство является перемещаемым по направляющей, а направляющая имеет первое целевое положение и первую контрольную точку, причем первая контрольная точка соответствует первому целевому положению, причем способ содержит:
определение первой контрольной точки, соответствующей первому целевому положению на направляющей, при этом расстояние между первой контрольной точкой и первым целевым положением меньше предварительно заданного расстояния;
получение во время перемещения подвесного устройства по направляющей первой скорости подвесного устройства в первой контрольной точке на направляющей;
определение того, является ли первая скорость подвесного устройства в первой контрольной точке меньшей пороговой скорости; и
в ответ на определение того, что первая скорость подвесного устройства в первой контрольной точке меньше пороговой скорости, приведение в действие устройства управления для перемещения подвесного устройства в первое целевое положение.
22. Невременный машиночитаемый носитель данных по п.21, причем:
подвесное устройство имеет фиксированное состояние и состояние ручного перемещения, при этом в фиксированном состоянии подвесное устройство выполнено фиксируемым к направляющей, в состоянии ручного перемещения подвесное устройство выполнено перемещаемым пользователем вручную,
подвесное устройство работает в фиксированном состоянии в исходном положении подвесного устройства на направляющей, и причем способ дополнительно содержит:
получение запроса на снятие фиксации подвесного устройства; и
приведение в действие устройства управления, чтобы перевести подвесное устройство из фиксированного состояния в состояние ручного перемещения.
23. Невременный машиночитаемый носитель данных по п.22, причем:
подвесное устройство дополнительно имеет состояние автоматического перемещения, при этом в состоянии автоматического перемещения подвесное устройство выполнено перемещаемым устройством управления; и
приведение в действие устройства управления для перемещения подвесного устройства в первое целевое положение дополнительно содержит приведение в действие устройства управления, чтобы перевести подвесное устройство из состояния ручного перемещения в состояние автоматического перемещения.
24. Невременный машиночитаемый носитель данных по п. 23, причем способ дополнительно содержит:
приведение в действие устройства управления, чтобы перевести подвесное устройство из состояния автоматического перемещения в фиксированное состояние в первом целевом положении.
25. Невременный машиночитаемый носитель данных по п. 22 или 23, причем:
устройство управления содержит муфту и электродвигатель,
подвесное устройство работает в фиксированном состоянии, когда муфта замкнута, а электродвигатель выключен,
подвесное устройство работает в состоянии ручного перемещения, когда муфта разомкнута, а электродвигатель выключен, и
подвесное устройство работает в состоянии автоматического перемещения, когда муфта замкнута, а электродвигатель включен.
| US 2006126795 A1, 15.06.2006 | |||
| US 5048070 A, 10.09.1991 | |||
| US 4501011 A, 19.02.1985 | |||
| US 2013003939 A1, 03.01.2013. |

