Изобретение относится к области строительных и дорожных машин, а именно к одноковшовым погрузчикам.
Известна одноковшовая погрузочная машина (SU а.с. 1071713 E02F 9/220), содержащая базовую машину, рабочее оборудование, включающее стрелу и ковш с гидроцилиндрами привода, датчик глубины внедрения, установленный в ковше.
Недостаток известного технического решения заключается в том, что траектория движения режущей кромки днища ковша в процессе набора материала не параллельна естественному откосу штабеля. Поэтому если траектория крутая то, при черпании материал осыпается под ковш, уменьшая его наполнение и соответственно производительность погрузчика. Если же траектория пологая, то на режущей кромке ножа сохраняется уплотненное ядро и возникает большое непреодолимое сопротивление движению ковша, также снижающее наполняемость ковша и производительность.
Наиболее близким по технической сущности к предлагаемому устройству является система управления одноковшового погрузчика (RU патент 2235171, E02F 9/22), включающая базовую машину, рабочее оборудование содержащее стрелу и ковш с гидроцилиндрами привода, гидроаппаратуру управления с датчиком глубины внедрения, установленным на ковше. Данное техническое решение обеспечивает движение режущей кромки ковша, при наборе материала, по траектории параллельной углу естественного откоса штабеля. Однако оно не позволяет в полной мере достичь заявленных результатов, а именно снижение затрат энергии и повышение производительности.
Дело в том, что для достижения таких результатов необходимо при наборе материала не только выдерживать траекторию движения режущей кромки ковша параллельно естественному откосу штабеля, но и сохранять положение днища ковша параллельно откосу. В известном техническом решении при наборе материала в ковш, погрузчик перемещается вперед, и после внедрения ковша на глубину(0,4-0,5) ширины днища, включается поворот ковша. Ковш поворачивается относительно шарнира соединяющего его со стрелой, при этом угол между днищем и опорной поверхностью непрерывно увеличивается. Поэтому все большая часть напорного усилия погрузчика затрачивается не наполнение ковша, а на преодоление сопротивления уплотняемого материала, воздействующего на нижнюю наружную поверхность днища ковша. Результатом такого воздействия будет увеличение буксования движителей и лишние затраты энергии, а также увеличение длительности рабочего цикла и в конечном итоге снижение производительности. В сущности, реализуется вариант раздельного способа черпания материала погрузчиком с присущим ему недостатком, а именно низким коэффициентом наполнения ковша KH=0.4-0.6 для многих видов материалов (Гальперин М.И., Домбровский Н.Г. Строительные машины: Учебник для вузов. М. Высшая школа, 1980. С. 176).
Задачей предлагаемого изобретения является снижение затрат энергии в процессе набора материала в ковш, увеличение его наполнения и повышение производительности путем автоматической реализации движения режущей кромки и днища ковша параллельно углу естественного откоса штабеля.
Указанный технический результат достигается тем, что система управления одноковшового погрузчика, содержащая базовую машину, рабочее оборудование включающее стрелу и ковш с гидроцилиндрами привода, гидроаппаратуру управления с датчиком глубины внедрения, установленном на ковше, отличающаяся тем, что она снабжена датчиком объема материала в ковше с реле и переключателем, датчиком углового перемещения ковша, регулируемым гидродросселем и электроуправляемым гидроклапаном, при этом гидродроссель и гидроклапан включены параллельно в гидролинию соединяющую поршневую полость гидроцилиндра стрелы с электрогидраспределителем, соленоид управления которого соединен электролинией с соленоидом гидроклапана и с замыкающим контактом датчика углового перемещения ковша, к размыкающим контактам которого присоединен соленоид электрогидрораспределителя гидроцилиндра поворота ковша, а размыкающие контакты соединены с источником питания последовательно через контакты датчика глубины внедрения ковша и размыкающий контакт реле датчика объема материала, а к замыкающему контакту его присоединены световой и звуковой сигнализаторы.
Датчик глубины внедрения ковша и датчик объема материала выполнены регулируемые в виде упругих трубок с токопроводящими шинками и контактами внутри, соединенными через переключатель с обмоткой реле. Датчик углового перемещения ковша выполнен с возможностью регулирования угла поворота, путем перемещения шторки замыкателя, а орган управления регулируемого гидродросселя снабжен шкалой проградуированной в единицах скорости вертикального перемещения режущей кромки ковша
Предложенная система управления одноковшового погрузчика отличается от прототипа совокупностью отличительных признаков, приведенных в отличительной части формулы изобретения.
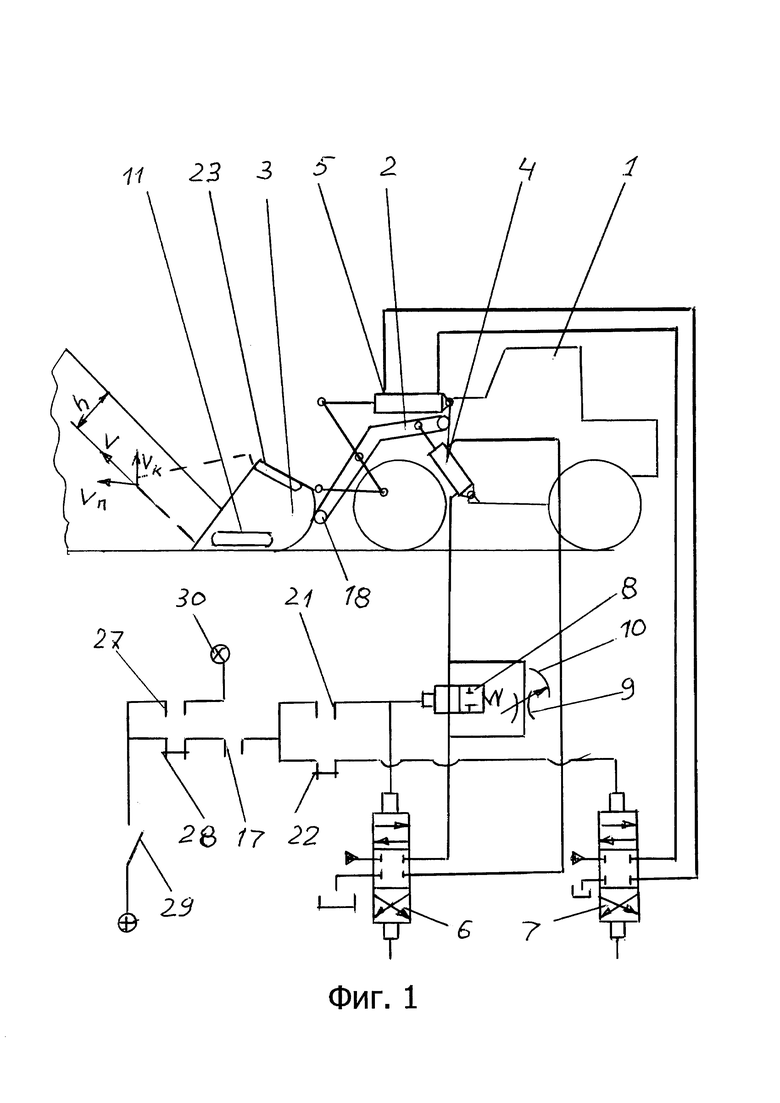
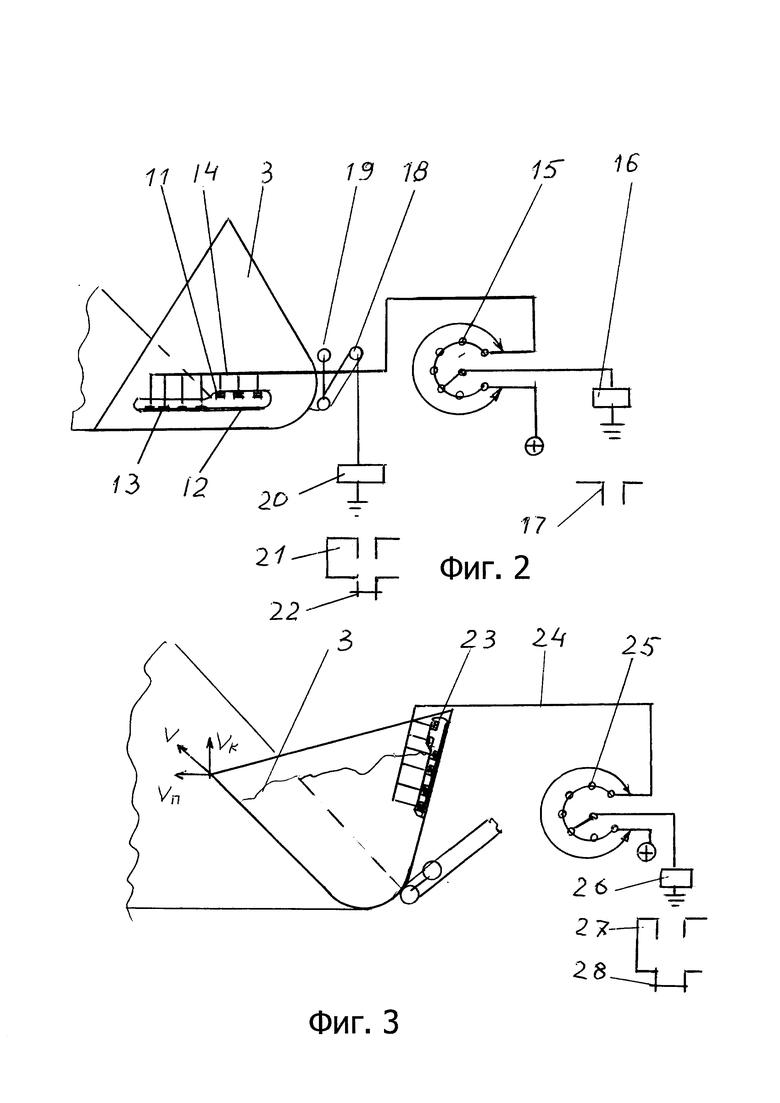
На фиг. 1 изображен общий вид системы управления одноковшового погрузчика; на фиг. 2 - устройство датчика глубины внедрения ковша и установка датчика перемещения; на фиг. 3 - установка датчика объема материала в ковше.
Для более удобного пояснения устройства и действия системы она привязана к погрузчику, содержащему базовую машину 1, стрелу 2 с ковшом 3 и гидроцилиндрами 4 и 5 их привода, а также электрогидрораспределители 6 и 7, управляемые с пульта из кабины (условно не показан). В гидролинию, соединяющую поршневую полость гидроцилиндра 4 подъема стрелы 2, включены параллельно управляемый гидроклапан 8 и регулируемый гидродроссель 9 со шкалой 10 проградуированной в единицах измерения вертикальной скорости подъема режущей кромки ковша 3. На боковой стенке ковша установлен датчик 11 глубины внедрения, который выполнен в виде упругой трубки (фиг. 2) с расположенными внутри токопроводящими шинкой 12 и контактами 13, соединенные кабелем 14 с переключателем 15. Переключатель 15 соединен с обмоткой реле 16, имеющего замыкающий контакт 17. На стреле 2 у шарнира соединяющего ее с ковшом установлен датчик 18 углового перемещения, например, щелевой магнитный и его шторка-замыкатель 19 установлена на ковше с возможностью углового регулирования. Выход датчика 18 соединен с обмоткой 20 реле, имеющего замыкающий 21 и размыкающий 22 контакты. На задней стенке ковша 3 установлен датчик 23 объема материала в ковше, устроенный аналогично с датчиком 11 глубины внедрения. Датчик 23 (фиг. 3) соединен кабелем 24 с переключателем 25, который соединен с обмоткой 26 реле имеющего замыкающий 27 и размыкающий 28 контакты. Контакты 27 и 28 соединены с источником питания через выключатель 29 и замыкающий контакт 27 соединен со световым и звуковым сигнализатором 30, а размыкающий контакт 28 соединен последовательно с контактом 17 датчика 11 глубины внедрения. Контакт 17 соединен последовательно с контактами 21 и 22 датчика 18 углового перемещения ковша 3. Замыкающий контакт 21 соединен с обмоткой управляемого гидроклапана 8 и с обмоткой гидрораспределителя 6 управляющего подъемом стрелы а размыкающий контакт 22 соединен с обмоткой гидрораспределителя 7 управления поворотом ковша.
Система управления одноковшового погрузчика действует следующим образом.
В исходном положении (фиг. 1) погрузчик неподвижен, ковш опущен и его днище расположено под углом 5-7 градусов к опорной поверхности. Контакты 17, 21 и 27 замкнуты, а контакты 22 и 28 разомкнуты. Золотники гидрораспределителей 6 и 7 занимают нейтральные позиции, а управляемый гидроклапан 8 открыт.
Для начала работы машинист включает включатель 29 и перемещение погрузчика вперед. При перемещении погрузчика ковш врезается в штабель материала, который воздействует на датчик 11 глубины внедрения. По достижении установленной переключателем 15 величины внедрения 0,3-0,4 от глубины ковша, реле замыкает контакт 17, подающий питание через контакт 22 на обмотку гидрораспределителя 7. Гидрораспределитель 7 соединяет напорную гидролинию с поршневой полостью гидроцилиндра 5 поворота ковша. При повороте ковша на угол равный углу естественного откоса 45 градусов, что соответствует положению днища ковша параллельно естественному откосу штабеля, датчик 18 углового перемещения размыкает контакт 22, что останавливает поворот ковша и замыкает контакт 21.
Замыкаясь контакт 21 подает питание на обмотки гидрораспределителя 6 и управляемого гидроклапана 8. Гидораспределитель 6 соединяет напорную гидролинию с поршневой полостью гидроцилиндра 4 подъема стрелы, через регулируемый гидродроссель 9. Орган управления регулируемого дросселя 9 устанавливается по шкале 10 таким образом, чтобы вертикальная скорость подъема режущей кромки ковша была равна скорости перемещения погрузчика, что обеспечивает траекторию движения режущей кромки параллельно углу естественного откоса штабеля. Поскольку днище ковша также расположено параллельно углу естественного откоса (на фиг. 1 показано прерывистыми линиями), то при продолжающимся поступательном перемещении погрузчика ковш срезает слой материала постоянной толщины h с минимальными затратами энергии, наполняясь до объема заданного датчиком 23. По достижении заданного объема материала в ковше датчик 23 через переключатель 25 подает питание на обмотку 26, что вызывает размыкание контакта 28, возвращение золотника гидрораспределителя 6 в нейтральную позицию и остановку подъема стрелы. Одновременно замыкается контакт 27, включающий сигнализатор 30 окончания набора материала в ковш, поэтому машинист переходит на ручное управление дальнейшими элементами рабочего процесса: отъезд от штабеля, подъезд к транспортному средству, разгрузка ковша.
Учитывая многообразие свойств и видов материалов, с которыми работает погрузчик, предлагаемая система управления позволяет производить регулировку в соответствии с конкретными условиями эксплуатации и задавать оптимальные параметры работы. Переключателем 15, датчика 11 глубины внедрения, возможно установить оптимальную для данного материала величину внедрения ковша.
Датчик углового перемещения 18 позволяет регулировать угол поворота ковша в соответствии с реальным углом естественного откоса путем перемещения шторки-замыкателя 19. Объем материала в ковше возможно задавать переключателем 25 датчика объема 23. Наконец и вертикальную скорость подъема режущей кромки ковша, возможно установить сообразуясь с реальной скоростью перемещения погрузчика с помощью регулируемого дросселя 9 по шкале 10. Все это расширяет эксплуатационные возможности одноковшового погрузчика.
Таким образом, предлагаемое техническое решение обеспечивает в процессе набора материала в ковш положение днища ковша параллельно естественному откосу штабеля и параллельную ему траекторию движения режущей кромки ковша. Автоматизация наиболее сложного элемента рабочего процесса, такого как, наполнение материалом ковша, практически реализует совмещенный способ черпания материала, увеличивая наполнение ковша и производительность. Кроме того упрощается управление рабочим процессом и снижается утомляемость машиниста, также способствуя повышению производительности. Положение днища ковша и траектория движения режущей кромки параллельно поверхности естественного откоса штабеля снижает величину необходимого напорного усилия погрузчика и соответственно коэффициент буксования движителей, что уменьшает нагрузки на двигатель, трансмиссию и ходовое оборудование, увеличивая долговечность погрузчика. Необходимо отметить, что для практической реализации предлагаемой системы управления нет необходимости менять конструкцию погрузчиков и ее можно использовать на существующих машинах.
Достаточно установить в дополнении к штатному оборудованию простые элементы такие, как датчики на ковш и управляемый гидроклапан с регулируемым дросселем в гидролинию между гидрораспределителем и гидроцилиндром подъема стрелы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ФРОНТАЛЬНЫЙ ПОГРУЗЧИК | 2002 |
|
RU2235170C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЧЕРПАНИЕМ СЫПУЧЕГО МАТЕРИАЛА | 2002 |
|
RU2235171C2 |
| Одноковшовая погрузочная машина | 1982 |
|
SU1071714A1 |
| Одноковшовая погрузочная машина | 1982 |
|
SU1071713A1 |
| СПОСОБ НАБОРА СЫПУЧИХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2009295C1 |
| Одноковшовая погрузочная машина | 1988 |
|
SU1566047A1 |
| Ковшовая погрузочная машина | 1978 |
|
SU775342A2 |
| ФРОНТАЛЬНЫЙ ПОГРУЗЧИК С ЭНЕРГОСБЕРЕГАЮЩИМ ГИДРОПРИВОДОМ ПОГРУЗОЧНОГО ОБОРУДОВАНИЯ | 2005 |
|
RU2306389C2 |
| ЭКСКАВАТОР ДЛЯ ВСКРЫТИЯ ТРУБОПРОВОДОВ | 2019 |
|
RU2729632C1 |
| Ковшовый погрузчик | 1979 |
|
SU789377A1 |
Изобретение относится к области строительных и дорожных машин, а именно к одноковшовым погрузчикам и позволяет снизить затраты энергии на выполнение рабочего процесса, увеличить производительность и облегчить управление. Техническим результатом является снижение затрат энергии в процессе набора материала в ковш, увеличение его наполнения и повышение производительности. Система управления содержит базовую машину, стрелу, ковш и гидроцилиндры и их привода. На ковше установлены датчик глубины внедрения, датчик объема материала и датчик угла поворота ковша. При наборе материала ковш внедряется в штабель на заданную датчиком глубину, после чего происходит поворот ковша на угол, равный углу естественного откоса штабеля, когда днище устанавливается параллельно поверхности откоса. Затем датчик угла поворота включает гидроцилиндр подъема стрелы и гидроклапан, который с дросселем задает скорость движения режущей кромки. В процессе набора материала автоматически сохраняется положение днища параллельное откосу штабеля материала и срезается слой одинаковой толщины. Это снижает затраты энергии, повышает наполняемость ковша и соответственно производительность, а также облегчает управление рабочим процессом. 3 з.п. ф-лы, 3 ил.
1. Система управления одноковшового погрузчика, содержащая базовую машину, рабочее оборудование, включающее стрелу и ковш с гидроцилиндрами привода, гидроаппаратуру управления с датчиком глубины внедрения, установленным на ковше, отличающаяся тем, что она снабжена датчиком объема материала в ковше с реле и переключателем, датчиком углового перемещения ковша, регулируемым гидродросселем и электроуправляемым гидроклапаном, при этом гидродроссель и гидроклапан включены параллельно в гидролинию, соединяющую поршневую полость гидроцилиндра стрелы с элетрогидрораспределителем, соленоид управления которого соединен электролинией с соленоидом гидроклапана и с замыкающим контактом датчика углового перемещения ковша, к размыкающим контактам которого присоединен соленоид электрогидрораспределителя гидроцилиндра поворота ковша, а размыкающие контакты соединены с источником питания последовательно через контакты датчика глубины внедрения ковша и размыкающий контакт реле датчика объема материала, а замыкающий контакт его соединен со световым и звуковым сигнализатором.
2. Система управления одноковшового погрузчика по п. 1, отличающаяся тем, что датчик глубины внедрения ковша и датчик объема материала выполнены регулируемыми в виде упругой трубки с расположенными внутри токопроводящими шинками и контактами, соединенными через переключатель с обмотками реле.
3. Система управления одноковшового погрузчика по п. 1, отличающаяся тем, что датчик углового перемещения ковша выполнен с возможностью регулирования угла поворота путем перемещения шторки-замыкателя.
4. Система управления одноковшового погрузчика по п. 1, отличающаяся тем, что орган управления регулируемого гидродросселя снабжен шкалой, проградуированной в единицах измерения скорости вертикального перемещения режущей кромки ковша.
| СИСТЕМА УПРАВЛЕНИЯ ЧЕРПАНИЕМ СЫПУЧЕГО МАТЕРИАЛА | 2002 |
|
RU2235171C2 |
| Одноковшовая погрузочная машина | 1988 |
|
SU1566047A1 |
| Гидравлический привод ковшового погрузчика | 1980 |
|
SU905396A1 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧЕЙ МАШИНОЙ | 2007 |
|
RU2458206C2 |
| KR 9334883 B2, 10.05.2016 | |||
| CN 208056139 U, 06.11.2018. | |||

