Изобретение относится к области радиационной, химической и биологической защиты, а именно к техническим устройствам для дистанционного обеззараживания зараженной поверхности беспилотного летательного аппарата во время полета.
Известно решение RU 2367041 С1 „Установка для мойки и дезактивации", МПК G21F 9/34, содержащее расположенные одна над другой камеру мойки, сообщающуюся с атмосферой, и камеру для моющего агента, соединенные между собой трубопроводом, систему подачи сжатого воздуха с пневмораспределителем, связанную с камерой для моющего агента в верхней ее части. Камера мойки выполнена по размерам отмываемого изделия с минимальными зазорами и снабжена распределителем потока, установленным в нижней ее части. Камера для моющего агента в верхней части снабжена люком для загрузки абразивного материала, а в нижней части соплами, соединенными с трубопроводом подачи воды и люком для выгрузки абразивного материала. Для размещения изделий в камере мойки используется захват с центральным стержнем, образующим минимальный зазор между центральным стержнем и внутренней полостью отмываемого изделия.
Недостатком этого технического решения является невозможность использования данного устройства на беспилотных летательных аппаратах, отсутствуе возможности дистанционного управления данным устройством. (RU 2367041 С1, http://new.fips.ru).
Известно решение RU 148480 U1 „Моющее устройство для дезактивации техники", МПК B60S 3/00, содержащее по крайней мере, моечную рамку с форсунками, которая выполнена в виде прямоугольника и состоит, по крайней мере, из гаек и колен соединения, разборного трубопровода с форсунками, размещенными по всему периметру рамки, и входного узла подачи с гайкой-переходником, каждая форсунка выполнена в виде полого корпуса с соплом и центральным сердечником, корпус выполнен с каналом для подвода жидкости и содержит, соосную, жестко связанную с корпусом втулку с закрепленным в ее нижней части соплом, выполненным в виде цилиндрической двухступенчатой втулки, верхняя цилиндрическая ступень которой соединена посредством резьбового соединения с центральным цилиндрическим сердечником, имеющим несквозное внутреннее центральное отверстие, и установленным с кольцевым зазором относительно внутренней поверхности цилиндрической двухступенчатой втулки, кольцевой зазор соединен, по крайней мере, с тремя радиальными каналами, выполненными в цилиндрической двухступенчатой втулке, соединяющими его с кольцевой полостью, образованной внутренней поверхностью втулки и внешней поверхностью верхней цилиндрической ступени, причем кольцевая полость связана с каналом корпуса для подвода жидкости, при этом в нижней части центрального цилиндрического сердечника выполнена перегородка с отверстием, на которой установлен полый конический завихритель, причем коническая обечайка которого фиксируется на кольцевом буртике, образованном в перегородке отверстием, а на внешней поверхности полого конического завихрителя выполнена винтовая нарезка.
Недостатком этого технического решения является отсутствие возможности дистанционного управления данным устройством, невозможность использования данного устройства на беспилотных летательных аппаратах. (RU 148480 U1, http://new.fips.ru).
Из известных технических решений наиболее близким по назначению и технической сущности к заявляемому объекту является решение RU 192107 U1 „Устройство для дезактивации бронетанкового вооружения и техники", МПК G21F 9/34, содержащее вспомогательную силовую установку, соединенную газоотборным устройством с вихревым эжектором, оснащенным диффузором с заслонкой, при этом жидкостный рукав оборудован краном, а газожидкостный рукав соединен брандспойтом с удлинителем с щеткой.
Недостатком этого технического решения является отсутствие возможности дистанционного управления данным устройством, невозможность использования данного устройства на беспилотных летательных аппаратах. (RU 192107 U1, http://new.fips.ru).
Сущность изобретения
Задача, на которую направлено заявленное решение, разработка конструкции устройства дающего возможность проведения дистанционной обработки всей зараженной поверхности беспилотного летательного аппарата во время полета без приземления и контакта с пользователем или другими лицами и поверхностями.
Заявленная задача решается за счет применения форсунки к нижней части которой через жидкостный трубопровод подсоединен контейнер с жидкостью, а с боковой стороны через электромагнитный клапан подключен источник давления с редуктором. Дистанционное управление реализуется с помощью блока управления с устройством дистанционного взаимодействия.
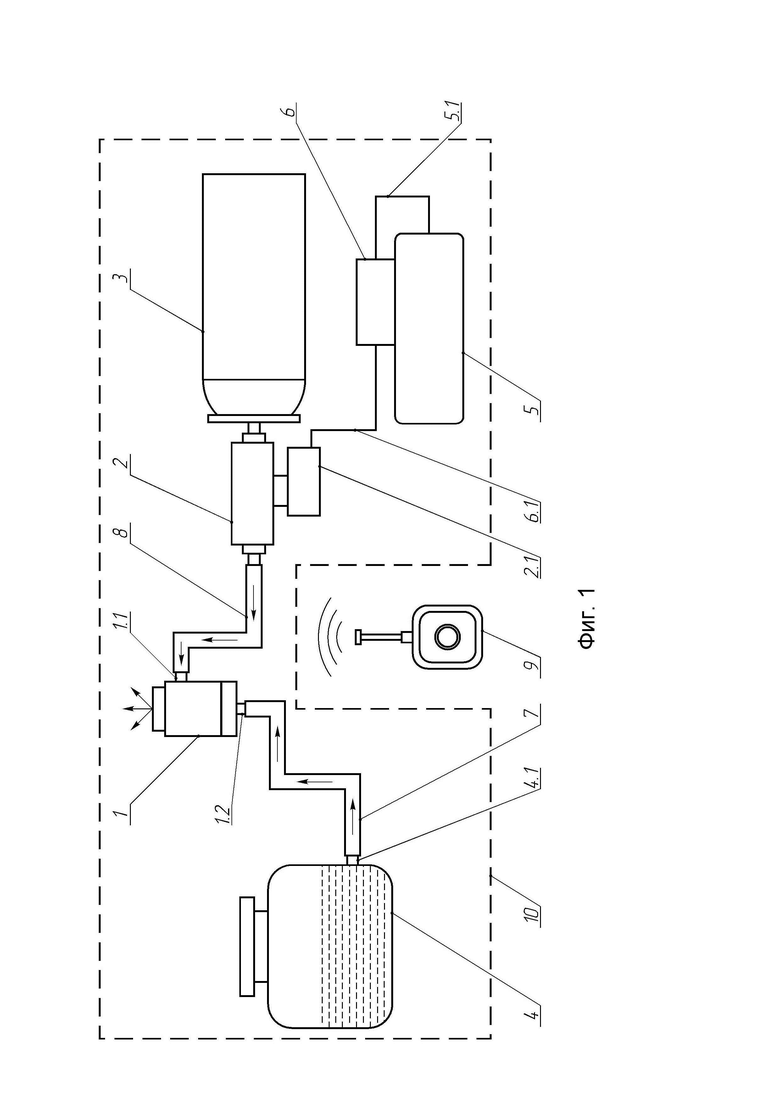
Устройство для дистанционного обеззараживания зараженной поверхности беспилотного летательного аппарата (БЛА) во время полета содержит форсунку (1) фиг. 1, электромагнитный клапан (2), источник давления (3), контейнер с жидкостью (4), источник питания (5), блок управления (6), жидкостный трубопровод (7), газовый трубопровод (8), пульт дистанционного управления (9).
Форсунка (1) фиг. 1 - это устройство в котором создается, в сужающемся сечении, пониженное давление одной среды, что вызывает подсос в поток другой среды, которая затем уносится и удаляется от места всасывания энергией первой среды, вследствие чего происходит пульверизация специальной жидкости на зараженную поверхность беспилотного летательного аппарата. Форсунка (1) имеет штуцер (1.1) подвода газовой среды под давлением и штуцер (1.2) подвода жидкой среды для обработки зараженной поверхности.
В частном случае исполнения штуцер (1.1) подвода газовой среды и штуцер (1.2) подвода жидкой среды расположены на боковой поверхности форсунки (1).
Электромагнитный клапан (2) фиг. 1 состоит из корпуса, соленоида (электромагнита) (2.1) с сердечником, на котором установлен поршень, регулирующий поток газа из источника давления (3).
Контейнер с жидкостью (4) фиг. 1 - это емкость для жидкости, которой обрабатывают зараженную поверхность беспилотного летательного аппарата во время полета.
Блок управления (6) фиг. 1 состоит из приемной микросхемы с реле, предназначенной для управления электромагнитным клапаном (2).
Жидкостный трубопровод (7) фиг. 1 и газовый трубопровод (8) - полая трубка, предназначенная для переноса вещества от одного месторасположения к другому.
Пульт дистанционного управления (9) фиг. 1 - электронное устройство для удаленного управления устройством для дистанционного обеззараживания зараженной поверхности беспилотного летательного аппарата во время полета.
Штуцером (1.1) фиг. 1 подвода газовой среды форсунка (1) соединена через газовый трубопровод (8) с электромагнитным клапаном (2). Электромагнитный клапан (2) сопряжен с источником давления (3). Штуцером (1.2) подвода жидкой среды форсунка (1) соединена через жидкостный трубопровод (7) со штуцером (4.1) контейнера с жидкостью (4).
К соленоиду (2.1) фиг. 1 электромагнитного клапана (2) проводами (6.1) подключен блок управления (6). Блок управления (6) имеет автономный источник питания (5) и пульт дистанционного управления (9) связанный с блоком управления (6) через радиоканал. Автономный источник питания (5) проводами (5.1) соединен с блоком управления (6).
В качестве автономного источника питания (5) выступает аккумуляторная батарея.
В качестве источника давления (3) выступает баллон с редуктором наполненный газом под давлением. Предпочтительно, использовать облегченный титановый баллон с редуктором наполненный газом под давлением.
В частном случае исполнения источником давления (3) является компрессор. Компрессор выполнен с возможностью крепления на раме беспилотного летательного аппарата, а его технические характеристики позволяют БЛА совершать полет.
Все составляющие устройства для дистанционного обеззараживания зараженной поверхности беспилотного летательного аппарата имеют крепежные элементы для фиксации взаимного расположения составляющих устройства на раме БЛА.
Предлагаемое техническое решение в виде устройства для дистанционного обеззараживания зараженной поверхности беспилотного летательного аппарата крепится на раме или под обшивкой корпуса БЛА.
В частном случае исполнения устройство для дистанционного обеззараживания зараженной поверхности беспилотного летательного аппарата имеет корпус (10) внутри которого располагаются элементы образующие устройство. Корпус имеет возможность крепления на раме БЛА.
Во всех случаях исполнения форсунка (1) фиг. 1 устройства для дистанционного обеззараживания зараженной поверхности БЛА располагается выше всех элементов БЛА и устройства обеззараживания поверхности, в средней точке относительно общей площади БЛА. Факел распыления жидкости направлен в верх и настроен на полное окутывание облаком распыления БЛА.
Способ дистанционного обеззараживания во время полета поверхности беспилотного летательного аппарата включает следующую последовательность действий.
Первоначально устанавливают устройство для дистанционного обеззараживания зараженной поверхности на раму беспилотного летательного аппарата, таким образом чтобы форсунка (1) фиг. 1 располагалась выше всех элементов беспилотного летательного аппарата и устройства обеззараживания поверхности, в средней точке относительно общей площади БЛА. Факел распыления форсункой (1) жидкости направляют в верх и настраивают на полное окутывание БЛА облаком распыления.
Запускают беспилотный летательный аппарат в зону радиационного, химического или биологического загрязнения для выполнения научных исследований, фотосъемки, импактного мониторинга территории, линейного патрулирования.
После завершения поставленных задач и выхода беспилотного летательного аппарата из зоны загрязнения проводят процедуру обеззараживания поверхности беспилотного летательного аппарата во время полета на точку старта.
Оператор управления по средствам отправки команд полетному контроллеру БЛА заставляет зависнуть в воздухе беспилотный летательный аппарат. Нажимают кнопку на пульте дистанционного управления (9) фиг. 1 устройством для обеззараживания поверхности БЛА. Происходит передача радиосигнала в блок управления (6) устройством. После приема, радиосигнал преобразуется в электрический, который в свою очередь через реле блока управления (6) поступает к соленоиду (2.1) электромагнитного клапана (2), прикрепленному к источнику давления (3). После открытия электромагнитного клапана (2) газ под давлением подается через газовый трубопровод (8) и штуцер подвода газовой среды (1.1) на форсунку (1), к которой подсоединен через штуцер подвода жидкой среды (1.2) и жидкостный трубопровод (7) контейнер (4) со специальной жидкостью. Происходит диспергирование специальной жидкости в полидисперсный аэрозоль и пульверизация аэрозоля на зараженную поверхность беспилотного летательного аппарата.
Во время пульверизации аэрозоля оператор управления по средствам отправки команд полетному контроллеру БЛА заставляет вращаться беспилотный летательный аппарат вокруг своей оси параллельно земле, для исключения сдувания аэрозоля лишь на одну сторону БЛА. Вихревые и турбулентные потоки работающих лопастей позволяют равномерно смочить сплошной пленкой всю поверхность БЛА, что и позволяет достичь полного обеззараживания поверхности беспилотника.
Технический результат заключается в возможности дистанционного обеззараживания всей зараженной поверхности беспилотного летательного аппарата, за счет применения блока управления с устройством дистанционного взаимодействия, что даст возможность на дальнейшую безопасную эксплуатацию беспилотного летательного аппарата.
Краткое описание чертежей:
на фиг. 1 - схематичное изображение устройства для дистанционного обеззараживания зараженной поверхности беспилотного летательного аппарата во время полета. Общий вид;
Краткое описание конструктивных элементов:
1 - форсунка;
1.1 - штуцер подвода газовой среды;
1.2 - штуцер подвода жидкой среды;
2 - электромагнитный клапан;
2.1 - соленоид;
3 - источник давления;
4 - контейнер с жидкостью;
4.1 - штуцер;
5 - источник питания;
5.1 - провод;
6 - блок управления;
6.1 - провод;
7 - жидкостный трубопровод;
8 - газовый трубопровод;
9 - пульт дистанционного управления;
10 - корпус устройства;
Осуществление заявленного решения:
Заявленное решение работает следующим образом.
Первоначально устанавливают устройство для дистанционного обеззараживания зараженной поверхности на раму беспилотного летательного аппарата, таким образом чтобы форсунка (1) фиг. 1 располагалась выше всех элементов беспилотного летательного аппарата и устройства обеззараживания поверхности, в средней точке относительно общей площади БЛА. Факел распыления форсункой (1) жидкости направляют в верх и настраивают на полное окутывание БЛА облаком распыления.
Запускают беспилотный летательный аппарат в зону радиационного, химического или биологического загрязнения для выполнения научных исследований, фотосъемки, импактного мониторинга территории, линейного патрулирования.
После завершения поставленных задач и выхода беспилотного летательного аппарата из зоны загрязнения проводят процедуру обеззараживания поверхности беспилотного летательного аппарата во время полета на точку старта.
Оператор управления по средствам отправки команд полетному контроллеру БЛА заставляет зависнуть в воздухе беспилотный летательный аппарат. Нажимают кнопку на пульте дистанционного управления (9) фиг. 1 устройством для обеззараживания поверхности БЛА. Происходит передача радиосигнала в блок управления (6) устройством. После приема, радиосигнал преобразуется в электрический, который в свою очередь через реле блока управления (6) поступает к соленоиду (2.1) электромагнитного клапана (2), прикрепленному к источнику давления (3). После открытия электромагнитного клапана (2) газ под давлением подается через газовый трубопровод (8) и штуцер подвода газовой среды (1.1) на форсунку (1), к которой подсоединен через штуцер подвода жидкой среды (1.2) и жидкостный трубопровод (7) контейнер (4) со специальной жидкостью. Происходит диспергирование специальной жидкости в полидисперсный аэрозоль и пульверизация аэрозоля на зараженную поверхность беспилотного летательного аппарата.
Во время пульверизации аэрозоля оператор управления по средствам отправки команд полетному контроллеру БЛА заставляет вращаться беспилотный летательный аппарат вокруг своей оси параллельно земле, для исключения сдувания аэрозоля лишь на одну сторону БЛА. Вихревые и турбулентные потоки работающих лопастей позволяют равномерно смочить сплошной пленкой всю поверхность БЛА, что и позволяет достичь полной обеззараживаемости поверхности беспилотника.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБЕЗЗАРАЖИВАНИЯ МАЛОГАБАРИТНЫХ ОБЪЕКТОВ И СПОСОБ ЕГО РАБОТЫ | 2020 |
|
RU2724419C1 |
| Способ определения дисперсного состава альфа-активных примесей при аварийном выбросе в атмосферу | 2021 |
|
RU2777752C1 |
| Система аэромониторинга залежек морских животных | 2015 |
|
RU2609728C1 |
| Беспилотный привязной авиационный комплекс для внесения пестицидов и агрохимикатов в точном земледелии | 2020 |
|
RU2769411C1 |
| АВТОМАТИЧЕСКИЙ МУЛЬТИРОТОРНЫЙ АППАРАТ ТРАНСПОРТЕР ДЛЯ ОПЕРАТИВНОЙ ДОСТАВКИ МЕДИКАМЕНТОВ, ПРОДОВОЛЬСТВИЯ И ДРУГОГО ГРУЗА ЧЕРЕЗ ОПАСНУЮ ДЛЯ ЧЕЛОВЕКА ЗОНУ | 2020 |
|
RU2736604C1 |
| Воздухоплавательный роботизированный аппарат для мониторинга и внесения средств защиты растений, удобрений в точном земледелии | 2019 |
|
RU2703198C1 |
| АВТОНОМНОЕ ТЕХНИЧЕСКОЕ СРЕДСТВО ДЛЯ СПЕЦИАЛЬНОЙ ОБРАБОТКИ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ВЕРТОЛЁТНОГО ТИПА | 2021 |
|
RU2801755C2 |
| Беспилотный летательный аппарат для определения содержания питательных веществ растений в почве | 2024 |
|
RU2827242C1 |
| Способ ультрамалообъемного опрыскивания сельскохозяйственных растений и устройство для его осуществления с использованием беспилотных авиационных средств вертолетного типа | 2019 |
|
RU2730640C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1995 |
|
RU2133210C1 |
Группа изобретений относится к устройству и способу для дистанционного обеззараживания зараженной поверхности беспилотного летательного аппарата (БЛА) во время полета. Устройство содержит форсунку, источник давления, контейнер с жидкостью, жидкостный трубопровод, газовый трубопровод, электромагнитный клапан, блок управления, пульт дистанционного управления, автономный источник питания. Форсунка располагается выше всех элементов БЛА. Для дистанционного обеззараживания БЛА обеспечивают его зависание в воздухе путем передачи соответствующих команд с пульта управления, передают радиосигнал в блок управления устройством для обеззараживания, осуществляют пульверизацию аэрозоля на поверхности БЛА, при этом обеспечивают вращение БЛА вокруг его оси параллельно земле. Обеспечивается обработка зараженных поверхностей БЛА в полете без приземления. 2 н. и 3 з.п. ф-лы, 1 ил.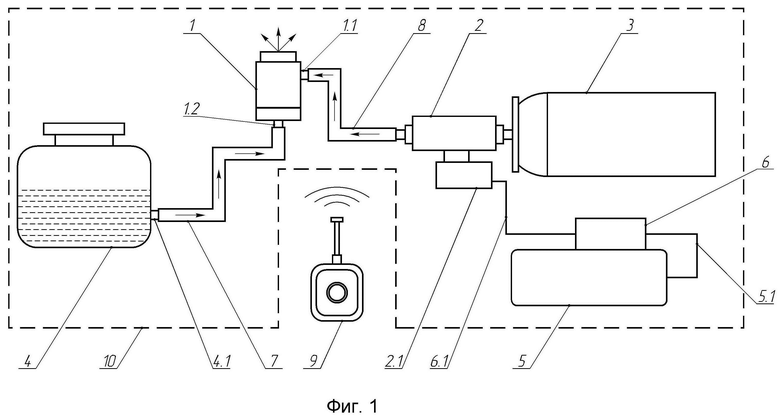
1. Устройство для дистанционного обеззараживания зараженной поверхности беспилотного летательного аппарата во время полета, включающее форсунку, источник давления, контейнер с жидкостью, жидкостный трубопровод, газовый трубопровод, отличающееся тем, что устройство расположено на летательном аппарате, электромагнитный клапан с одной стороны сопряжен с источником давления, а с другой стороны с газовым трубопроводом, к соленоиду электромагнитного клапана проводами подключен блок управления, блок управления проводами соединен с автономным источником питания, блок управления имеет пульт дистанционного управления, связанный с блоком управления через радиоканал, форсунка располагается выше всех элементов БЛА.
2. Устройство по п. 1, отличающееся тем, что все составляющие устройства имеют крепежные элементы.
3. Устройство по п. 2, отличающееся тем, что все составляющие устройства крепятся на раме или под обшивкой корпуса БЛА.
4. Устройство по п. 1, отличающееся тем, что форсунка располагается выше всех элементов устройства обеззараживания поверхности, в средней точке относительно общей площади БЛА.
5. Способ дистанционного обеззараживания во время полета поверхности беспилотного летательного аппарата, с установленным устройством для дистанционного обеззараживания, включающий следующие действия: БЛА заставляют зависнуть в воздухе по средствам отправки команд полетному контроллеру БЛА, передают радиосигнал в блок управления устройством для обеззараживания путем нажатия кнопки на пульте дистанционного управления устройством и осуществляют пульверизацию аэрозоля на зараженную поверхность беспилотного летательного аппарата, во время пульверизации аэрозоля по средствам отправки команд полетному контроллеру БЛА заставляют вращаться БЛА вокруг своей оси параллельно земле.
| 0 |
|
SU194376A1 | |
| WO 2017106903 A1, 29.06.2017 | |||
| CA 0002972055 A1, 29.12.2018 | |||
| WO 2018189848 A1, 18.10.2018 | |||
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ПОВЕРХНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2014238C1 |

