ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к устройству для отклонения ленты транспортера, предназначенной для транспортирования материала между местами расположения, и, в частности, но не исключительно, к устройству для отклонения ленты транспортера, образованному из секций, выполненных подвижными относительно друг друга для изменения относительной ориентации ленты транспортера внутри указанного устройства.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯ
Для транспортировки добытого кускового материала из первого места расположения во второе место расположения было предложено множество различных механизмов и способов. Например, для транспортировки материала внутри шахтных туннелей обычно используют стационарные транспортирующие устройства. Такие закрепленные устройства выполнены с возможностью соответствующего регулирования по величине уклона и по высоте с помощью опорных ножек и анкерных опор, поддерживающих раму транспортера внутри шахтного туннеля. Шахтная среда обычно содержит туннели, проходящие в различных направлениях, поэтому для транспортирования материала из одного туннеля в соседний туннель были предложены передвижные транспортирующие устройства для установки в месте пересечения туннелей с эффективным «перекрытием» зазора между стационарными транспортерами.
В патентном документе WO 2014/191195 описано устройство для отклонения ленты, содержащее первую секцию и вторую секцию, выполненную с возможностью сочленения с указанной первой секцией. На рамной части каждой секции установлено множество роликов для отклонения ленты, при этом в месте поворота устройство воздействует на вторую секцию для обеспечения сочленения и, соответственно, необходимого отклонения ленты при ее перемещении из первой секции во вторую секцию.
В патентных документах JP 2016084224, JP 2000168929, CN 2543903, JP 2002249214, CA 2912444 и US 9457958 приведены описания других устройств для отклонения ленты. Однако существующие приспособления для отклонения ленты имеют ограничения в отношении обеспечения простой установки и монтажа в пределах узкого участка, такого как шахта, управления лентой, в частности, регулирования натяжения ленты, осевого выравнивания ленты на роликах и напряжения в ленте, доступного диапазона регулирования ленты между различными секциями отклоняющего устройства и, соответственно, общей регулируемости устройства для создания эффективного «перекрытия» между верхней по потоку и нижней по потоку системами транспортирования, внутри которых должно быть расположено отклоняющее устройство для транспортирования материала. Соответственно, для решения этих проблем необходимо усовершенствованное приспособление для отклонения ленты.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Задачей настоящего изобретения является создание отклоняющего устройства для ленты транспортера, причем указанное устройство выполнено с возможностью управления или преобразования ориентации ленты, проходящей в первом продольном направлении ко второму продольному направлению, причем второе направление расположено под углом относительно первого направления. В частности, конкретной задачей является создание устройства для отклонения ленты, выполненного с возможностью регулируемого преобразования ленты, чтобы создать устройство, позволяющее удовлетворить широкий диапазон различных требований пользователя и, в частности, совместимое с уже существующей геометрией, с учетом которой кусковой материал необходимо транспортировать от первого участка ко второму участку.
Одной конкретной задачей является создание опорной рамы для ленты транспортера, обладающей возможностью легкой приспосабливаемости в трех измерениях и размещения на участке внутри установки для транспортирования материала, которая может, как правило, содержать дополнительные перемещаемые или стационарные ленточные транспортеры. Еще одной задачей является создание устройства для отклонения ленту, предназначенного для размещения в месте пересечения туннелей внутри шахты, образованного первым туннелем, который проходит в первом направлении и сопрягается со вторым туннелем, проходящим во втором, другом, направлении относительно горизонтальной плоскости и/или вертикальной плоскости.
Вышеуказанные задачи решены путем создания устройства для отклонения ленты, которое обладает возможностью легкой приспосабливаемости в трех измерениях и в котором бесконечная лента транспортера поддерживается группой роликов для отклонения ленты, которые, в свою очередь, установлены на жесткой раме с модульной конструкцией, при этом секции рамы выполнены с возможностью перемещения относительно друг друга. В частности, на каждой из рамных секций соответственно установлены ролики для отклонения ленты так, что перемещение частей по меньшей мере некоторых из рамных секций обеспечивает соответствующее перемещение роликов, которые, в свою очередь, обеспечивают отклонение ленты в трех измерениях. В соответствии с конкретным вариантом выполнения предложенное устройство для отклонения ленты содержит первую секцию, поддерживающую ленту, и вторую секцию, поддерживающую ленту, при этом второй секцией можно управлять в соответствии с множеством различных преобразований так, что ориентация ленты, проходящей во второй секции, является регулируемой относительно ориентации ленты, проходящей в первой секции. В соответствии с вышеуказанными задачами предложенное устройство для отклонения ленты обеспечивает по меньшей мере два преобразующих перемещения, включая первое поворотное перемещение в горизонтальной плоскости второй секции относительно первой секции, и второе вращательное или поворотное перемещение второй секции относительно первой секции в вертикальной плоскости. Помимо этого, настоящее изобретение может обеспечивать преобразующее перемещение ленты во второй секции относительно преобразующего перемещения ленты в первой секции, вплоть до пяти основных методов преобразования. Соответственно, предложенное устройство выполнено с возможностью его установки в месте пересечения шахтных туннелей для облегчения транспортирования материала от первого направления ко второму направлению, причем два шахтных туннеля могут проходить под любым углом или в любом направлении относительно друг друга как в горизонтальной, так и в вертикальной плоскости.
В частности, в соответствии с первым аспектом настоящего изобретения, предложено устройство для отклонения ленты транспортера, предназначенной для транспортирования материала, причем указанное устройство содержит первую секцию, поддерживающую ленту для прохождения ленты в первом продольном направлении и оканчивающуюся по меньшей мере одним первым концевым роликом, вторую секцию, поддерживающую ленту для прохождения ленты во втором продольном направлении и оканчивающуюся по меньшей мере одним вторым концевым роликом, причем второе продольное направление проходит поперечно или по существу перпендикулярно первому направлению, ролики для отклонения ленту, расположенные в направлении хода ленты между первым и вторым концевыми роликами для отклонения ленты и обеспечения ее прохождения от первого продольного направления ко второму продольному направлению, первый регулятор ленты, обеспечивающий поворот вокруг оси поворота ленты, проходящей во второй секции, относительно ленты, проходящей в первой секции, для регулирования угловой ориентации в горизонтальной плоскости ленты, проходящей в первом и втором продольных направлениях в соответствующих первой и второй секциях, причем указанное устройство отличается тем, что оно содержит второй регулятор ленты обеспечивающий первый поворот ленты в положении между первым и вторым концевыми роликами для регулирования угловой ориентации в вертикальной плоскости ленты, проходящей во втором продольном направлении во второй секции, относительно ленты, проходящей в первом продольном направлении в первой секции.
Как вариант, указанное устройство дополнительно содержит третий регулятор ленты, отличающийся от второго регулятора ленты тем, что он обеспечивает подъем и опускание в вертикальной плоскости ленты во второй секции относительно ленты в первой секции. Как вариант, указанное устройство может дополнительно содержать четвертый регулятор, обеспечивающий регулирование в боковом направлении положения ленты, проходящей во второй секции в горизонтальной плоскости, относительно первого концевого ролика и в направлении, выровненном с первым продольным направлением так, чтобы выровнять ленту во второй секции относительно первого концевого ролика. В соответствии с другим аспектом указанное устройство может дополнительно содержать пятый регулятор, обеспечивающий регулирование угла, под которым поверхность ленты, по существу обращенная вверх и контактирующая с материалом во второй секции, проходит в направлении ширины ленты во второй секции относительно горизонтальной плоскости. Предпочтительно первый, второй, третий, четвертый и пятый регуляторы ленты являются отдельными и дополнительными регуляторами по отношению друг к другу. Такая конструкция является предпочтительной для создания устройства для отклонения ленты, обеспечивающего возможность геометрического регулирования, при котором положения отклоняющих шкивов могут быть отрегулированы относительно друг друга с поддержанием управляемого отслеживания ленты и, в свою очередь, с исключением смещения ленты между любыми двумя соседними шкивами. Такое устройство может быть установлено и использовано при наличии широкого диапазона геометрических ограничений, в частности, в условиях окружающей обстановки с уменьшенной шириной или высотой, что может иметь место, например, в подземной шахте.
Настоящее изобретение является совместимым с использованием бесконечной непрерывной ленты, что обеспечивает преимущество в нескольких отношениях. В частности, предложенное устройство может содержать, с возможностью совместимости, один узел привода для приведения в движение ленты в прямом и/или обратном направлении по роликам для отклонения ленты, при этом узел привода расположен на указанном устройстве или на удалении от него. В частности, в соответствии с одним вариантом выполнения, один узел привода может быть расположен на конце начальной загрузки или на разгрузочном конце первой или второй секций и, в частности, предпочтительно у поверхности, смежной с выходным концом подземной шахты. Такое расположение является предпочтительным для сведения к минимуму технического обслуживания, благодаря уменьшению загрязнения пылью, для улучшения охлаждения приводного двигателя и для улучшения условий безопасности внутри шахты.
В настоящем изобретении предпочтительно использованы жесткие модульные рамы или рамные секции, соединенные друг с другом по меньшей мере двумя подвижными связями, называемыми в данном документе «регуляторами ленты». Этот термин охватывает подвижные компоненты, средства сопряжения или участки, содержащие, в частности, поворотные кольца, линейные исполнительные механизмы (например, гидравлические или пневматические плунжеры, поршни и другие подобные механизмы), круговые скользящие или поворотные средства сопряжения, узлы подшипников скольжения, частично или полностью сферические шаровые соединения, линейные скользящие механизмы, такие как балки, установленные на роликах, механизмы со шкивами, механизмы с раздвижными стержнями или балками и другие подобные механизмы.
Предпочтительно указанное устройство дополнительно содержит третью секцию, поддерживающую ленту для прохождения ленты от первого концевого ролика до второго концевого ролика, причем указанная третья секция установлена с обеспечением физического соединения между первой и второй секциями.
Предпочтительно каждая из первой, второй и третьей секций содержит жесткую раму для установки, соответственно, первого и второго концевых роликов, роликов для отклонения ленты и регуляторов ленты. В частности, жесткая рама каждой из первой, второй и третьей секций может быть выполнена из балок, стоек, стержней, тросов, пластин, панелей или подобных элементов, которые могу быть установлены в жестком или закрепленном положении относительно друг друга (или размещены под натяжением) с образованием по существу единого жесткого тела, имеющего внутренний участок, подходящий для размещения одного или более роликов для отклонения ленты. Жесткая рама каждой секции предпочтительно образована балками, взаимно соединенными на их продольных концах, с формированием открытой конструкции, имеющей внутренний участок, в котором установлены ролики для отклонения ленты и в котором может проходить лента транспортера. В соответствии с предпочтительным вариантом выполнения регуляторы ленты установлены в месте сопряжения или физического пересечения первой, второй и/или третьей секций. То есть компонент или узел регулятора ленты может быть расположен на любом участке между рамой или первой, второй и/или третьей секциями для обеспечения соответствующего перемещения секций относительно друг друга. Управление регуляторами ленты может быть выполнено вручную или может быть автоматизировано с помощью дистанционного управления, например, с использованием электронного, гидравлического или пневматического средства активации.
Настоящее изобретение предпочтительно может быть выполнено в виде устройства (или станции) L-образного типа для поворачивания ленты, в котором первая, вторая (и третья) секции ориентированы относительно друг друга с образованием «L»-образной конфигурации. В частности, первая секция (и лента в первом продольном направлении) представляет собой основное «большее» плечо указанной «L»-образной конфигурации, а вторая секция (и лента во втором продольном направлении) представляет собой проходящее перпендикулярно «более короткое» плечо-основание указанной «L»-образной конфигурации.
Как вариант, и в соответствии с другими конкретными вариантами выполнения, любой регулятор ленты может быть выполнен в виде механического исполнительного механизма, воздействующего непосредственно на один или более роликов для отклонения ленты. То есть, например, соответствующие осевые концы ролика для отклонения ленты могут быть соединены с исполнительным механизмом или установлены внутри исполнительного механизма, такого как линейный исполнительный механизма (т.е. плунжер или поршень), или круговое подвижное средство сопряжения, так что положение оси вращения указанных роликов может быть отрегулировано по меньшей мере в горизонтальной и/или вертикальной плоскости.
Как вариант, первый регулятор ленты содержит первый поворотный механизм, обеспечивающий поворот второй секции относительно первой секции. Как вариант, первый поворотный механизм содержит шарнирный палец или шарнирный механизм, так что обеспечивается возможность поворота второй секции относительно первой секции. Как вариант, первый поворотный механизм содержит два отдельных поворотных приводных механизма, содержащих, например, первый шарнирный палец и второе круговое средство сопряжения (например, поворотное кольцо). Как вариант, первый шарнирный палец установлен на участке первого конца второй секции или в направлении первого конца второй секции, и на втором конце третьей секции или в направлении второго конца третьей секции.
Как вариант, второй регулятор ленты содержит по меньшей мере одно кольцеобразное средство сопряжения, воздействующее по меньшей мере на один из роликов для отклонения ленты, второй концевой ролик и/или третью секцию для поворота указанных роликов для отклонения ленты, второго концевого ролика и/или третьей секции вокруг оси, выровненной приблизительно параллельно продольной оси первой секции. Предпочтительно второй регулятор ленты обеспечивает физическое соединение между вторым концом третьей секции и участком второй секции так, что вторая секция может поворачиваться в вертикальной плоскости относительно закрепленных первой и третьей секций. Предпочтительно второй регулятор ленты выполнен в виде поворотного кольца (или другого подобного механизма), имеющего круговое средство сопряжения, образованное передвижными кольцами, роликовыми подшипниками, шариковыми подшипниками или другими подобными механизмами.
Как вариант, третий регулятор ленты содержит по меньшей мере одно кольцеобразное средство сопряжения, расположенное между первой и третьей секциями, для обеспечения поворота второй и третьей секций вокруг оси поворота, проходящей через первую секцию. Третий регулятор ленты предпочтительно обеспечивает физическое соединение между первым концом третьей секции и (средним по длине) участком первой секции так, что третья секция и вторая секция могут поворачиваться в вертикальной плоскости относительно неподвижной первой секции. Третий регулятор ленты предпочтительно выполнен в виде поворотного кольца (или другого подобного механизма), имеющего круговое средство сопряжения, образованное передвижными кольцами, роликовыми подшипниками, шариковыми подшипниками или другими подобными механизмами.
Как вариант, четвертый регулятор ленты содержит по меньшей мере один линейный исполнительный механизм для регулирования длины третьей секции, чтобы вызывать перемещение второй секции к первому концевому ролику и от него в продольном направлении ленты в первой секции. Четвертый регулятор ленты предпочтительно содержит линейный исполнительный механизм, такой как гидравлический плунжер, воздействующий на участки жесткой рамы так, чтобы обеспечивалось скольжение или перемещение частей рамы поверх или вдоль других частей рамы с соответствующим линейным вытягиванием или втягиванием рамы. Четвертый регулятор ленты предпочтительно расположен на втором продольном конце третьей секции, по существу на участке соединения со вторым продольным концом второй секции. Соответственно, вторая секция может быть отведена к завершающему концу первой секции и от него с помощью линейного регулирования третьей секции.
Как вариант, пятый регулятор ленты содержит по меньшей мере одно кольцеобразное средство сопряжения, воздействующее на ось вращения второго концевого ролика и выполненное с возможностью обеспечения поворота указанной оси вращения второго концевого ролика для выполнения углового выравнивания контактирующей с материалом поверхности ленты во второй секции в направлении ширины ленты во второй секции. Пятый регулятор ленты предпочтительно расположен во второй секции на участке в направлении второго продольного конца второй секции. Соответственно, первая часть второй секции может поворачиваться относительно продольной оси, проходящей через вторую секцию, относительно второй части второй секции (расположенной ближе всего к третьей секции в продольном направлении второй секции). В частности, большая часть длины второй секции (первая часть) или вся указанная длина может поворачиваться относительно короткой второй части второй секции, прикрепленной ко второму концу третьей секции. Соответственно, большая часть ленты транспортера, проходящей внутри второй секции, может поворачиваться или закручиваться вокруг продольной оси, проходящей через вторую секцию, по существу с выравниванием (т.е. по существу параллельно) со вторым продольным направлением ленты.
Лента предпочтительно является бесконечной непрерывной лентой, и каждая из первой и второй секций содержит соответствующую пару концевых роликов, содержащую первый и второй концевые ролики, поддерживающих ленту для прохождения ленты в первом и втором продольных направлениях, при этом поверхность ленты, контактирующая с материалом, по существу обращена вверх в первой и второй секциях между соответствующими парами концевых роликов, содержащими первый и второй концевые ролики. В частности, лента может представлять собой цельнотканую ленту транспортера.
В соответствии со вторым аспектом настоящего изобретения предложен блок ленточного транспортера для транспортирования материала между местами расположения, причем указанный блок содержит вышеописанное устройство.
В соответствии с третьим аспектом настоящего изобретения предложен способ транспортирования материала из первого места расположения во второе место расположения, причем указанный способ включает приведение в движение ленты транспортера для ее прохождения в первом продольном направлении в первой секции, оканчивающейся по меньшей мере одним первым концевым роликом, приведение в движение ленты транспортера для ее прохождения во втором продольном направлении во второй секции, оканчивающейся по меньшей мере одним вторым концевым роликом, при этом второе продольное направление выровнено поперечно или по существу перпендикулярно первому направлению, отклонение ленты, для ее прохождения от первого продольного направления ко второму продольному направлению, посредством роликов для отклонения ленты, расположенных в направлении перемещения ленты между указанными первым и вторым концевыми роликами, поворот ленты, проходящей во втором продольном направлении во второй секции, относительно ленты, проходящей в первом продольном направлении в первой секции, вокруг оси поворота для регулирования угловой ориентации в горизонтальной плоскости ленты, проходящей в первом и втором продольных направлениях в соответствующих первой и второй секциях, причем указанный способ отличается тем, что он включает поворот ленты в положении между первым и вторым концевыми роликами с помощью второго регулятора ленты для регулирования угловой ориентации в вертикальной плоскости ленты, проходящей во втором продольном направлении во второй секции, относительно ленты, проходящей в первом продольном направлении в первой секции.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Ниже приведено описание конкретного выполнения настоящего изобретения, исключительно в качестве примера, со ссылкой на сопроводительные чертежи, на которых
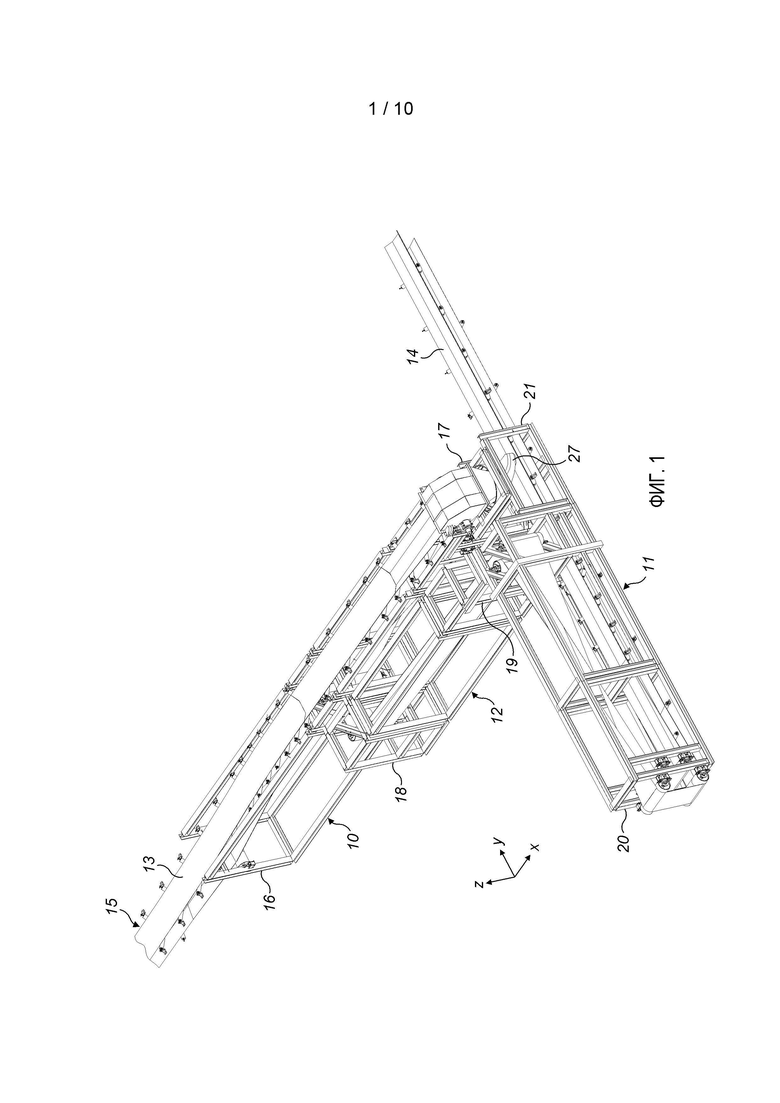
на фиг. 1 изображен вид в аксонометрии снаружи устройства для отклонения ленты транспортера, предназначенной для транспортирования кускового материала, в соответствии с первым конкретным вариантом выполнения настоящего изобретения,
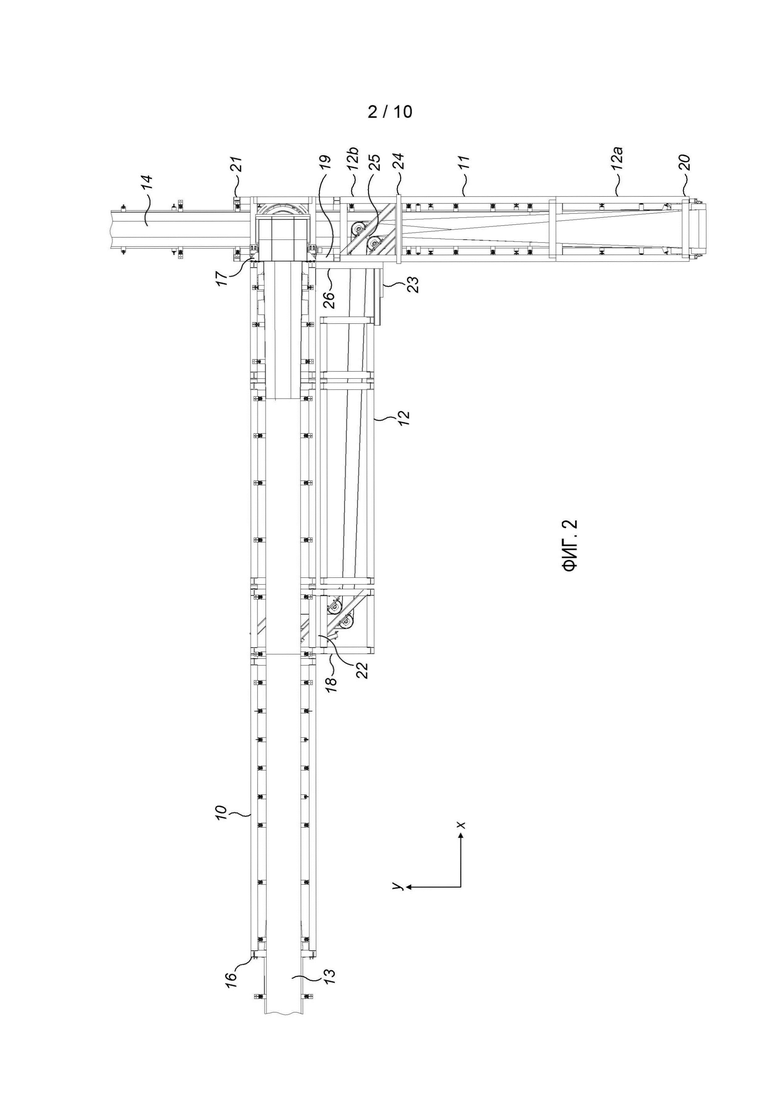
на фиг. 2 изображен вид в плане устройства, показанного на фиг. 1,
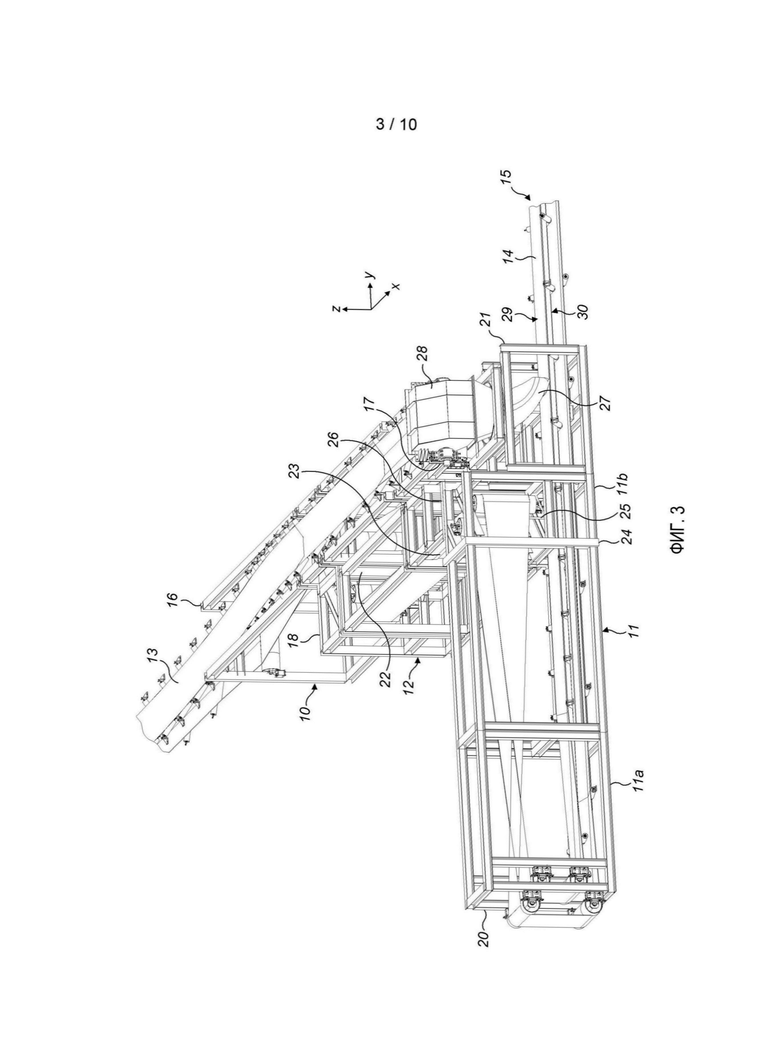
на фиг. 3 изображен другой вид в аксонометрии спереди устройства, показанного на фиг. 1,
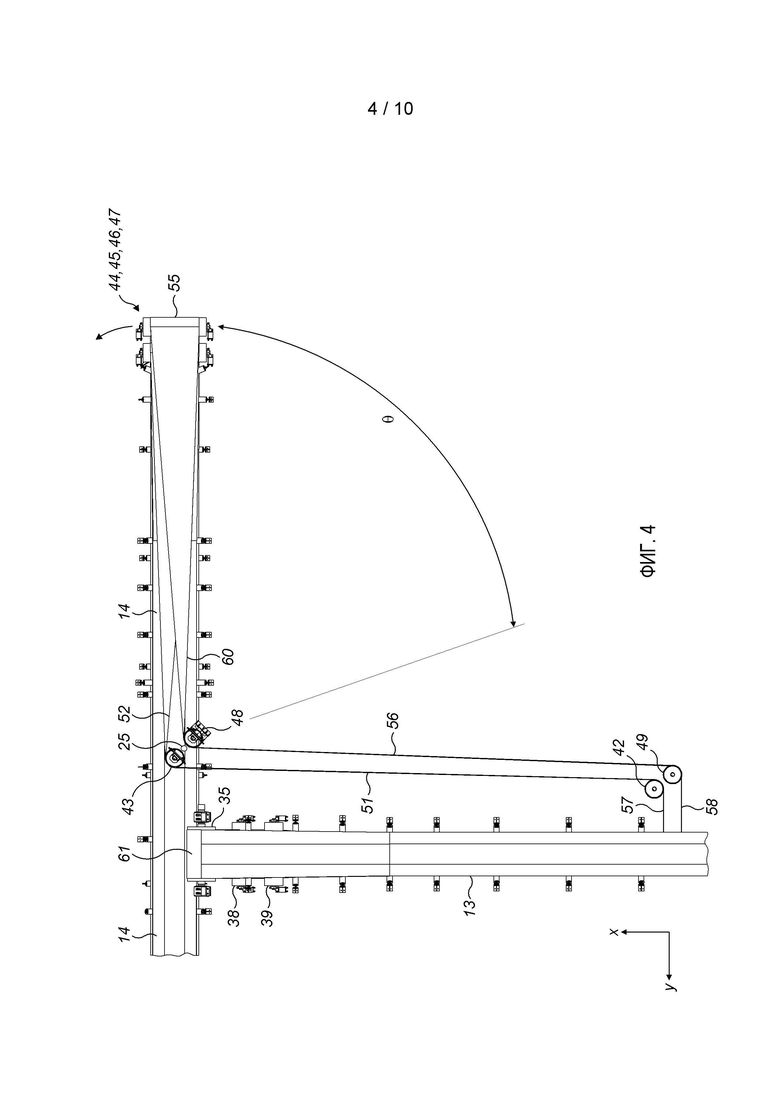
на фиг. 4 изображен вид в плане устройства для отклонения ленты транспортера, показанного на фиг. 1, причем избранные рамные секции удалены для наглядности изображения,
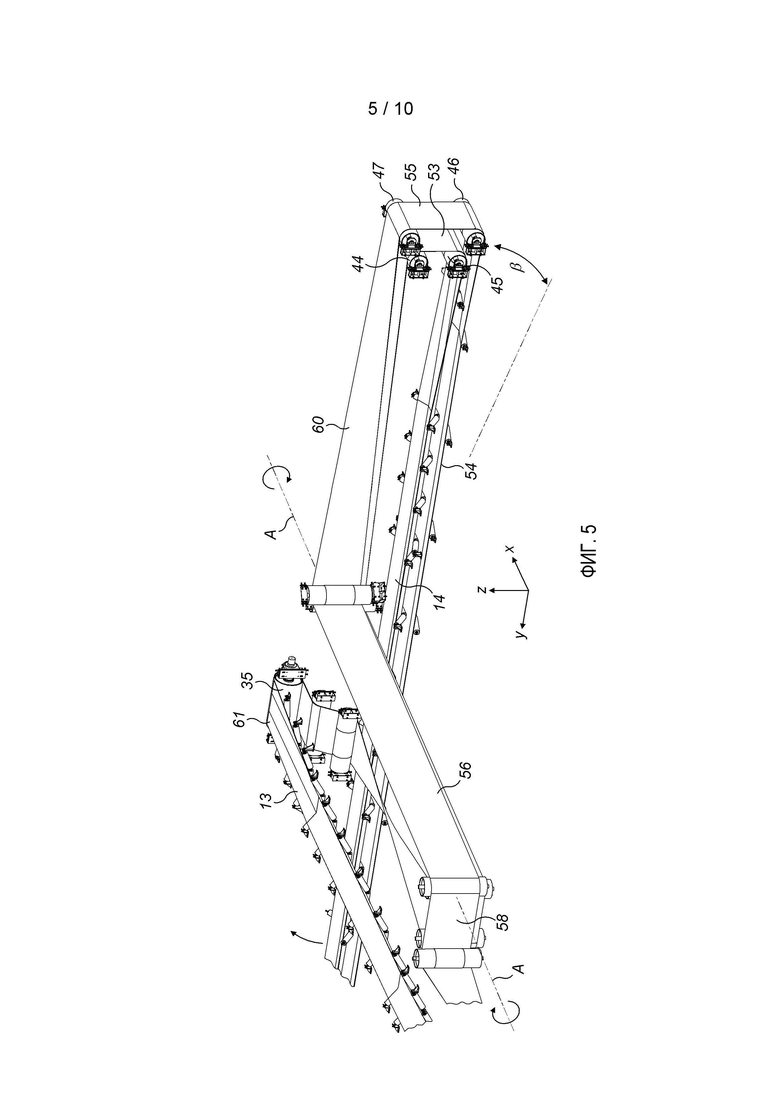
на фиг. 5 изображен вид в аксонометрии сзади с правой стороны устройства, показанного на фиг. 4, причем рамные секции удалены для наглядности изображения,
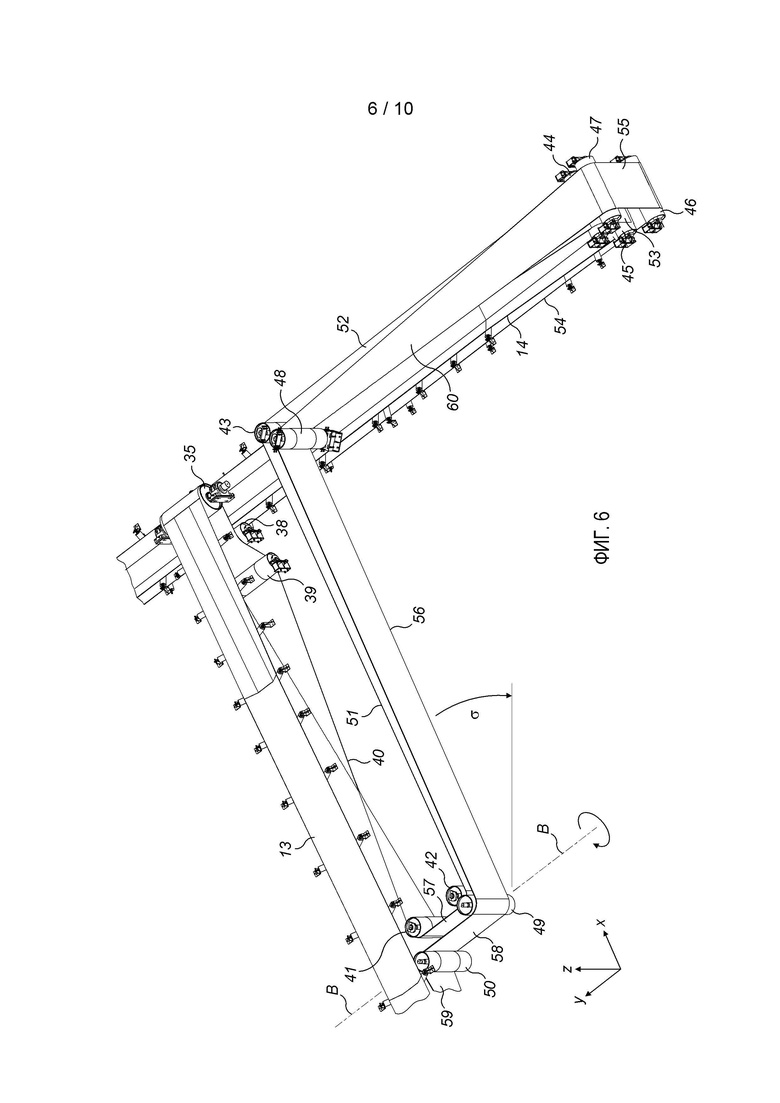
на фиг. 6 изображен вид в аксонометрии устройства для отклонения ленты, показанного на фиг. 5, причем рамные секции удалены для наглядности изображения,
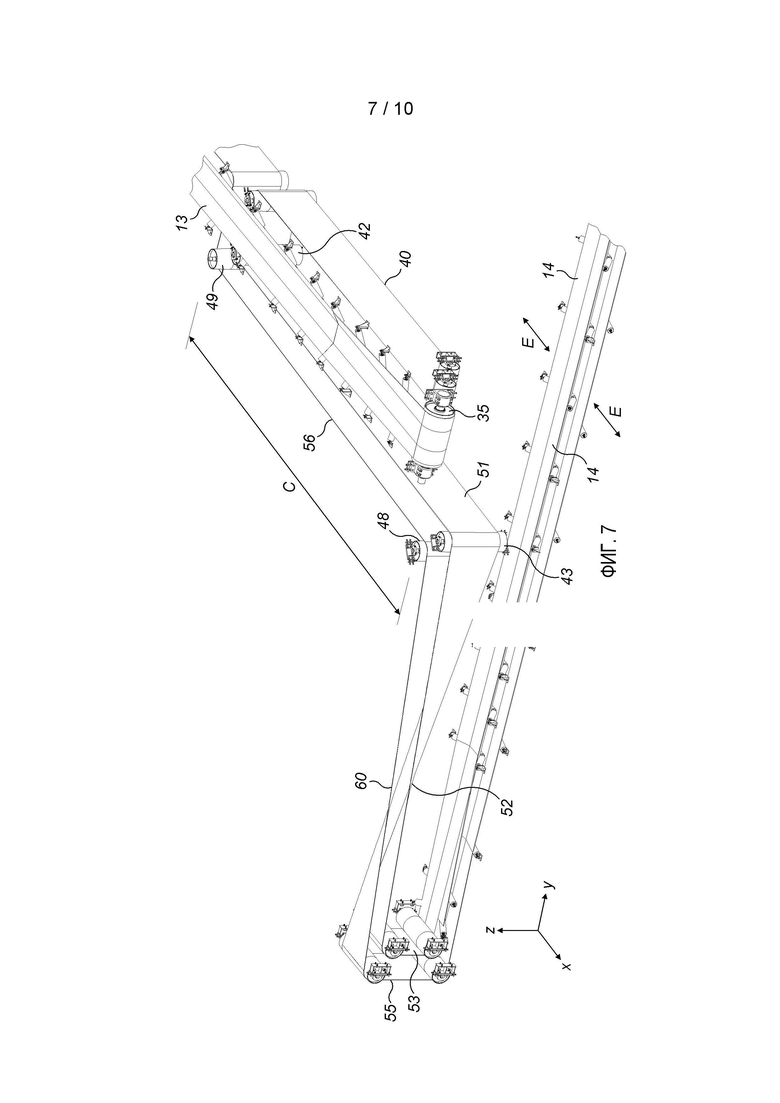
на фиг. 7 изображен другой вид в аксонометрии устройства для отклонения ленты, показанного на фиг. 5, причем рамные секции удалены для наглядности изображения,
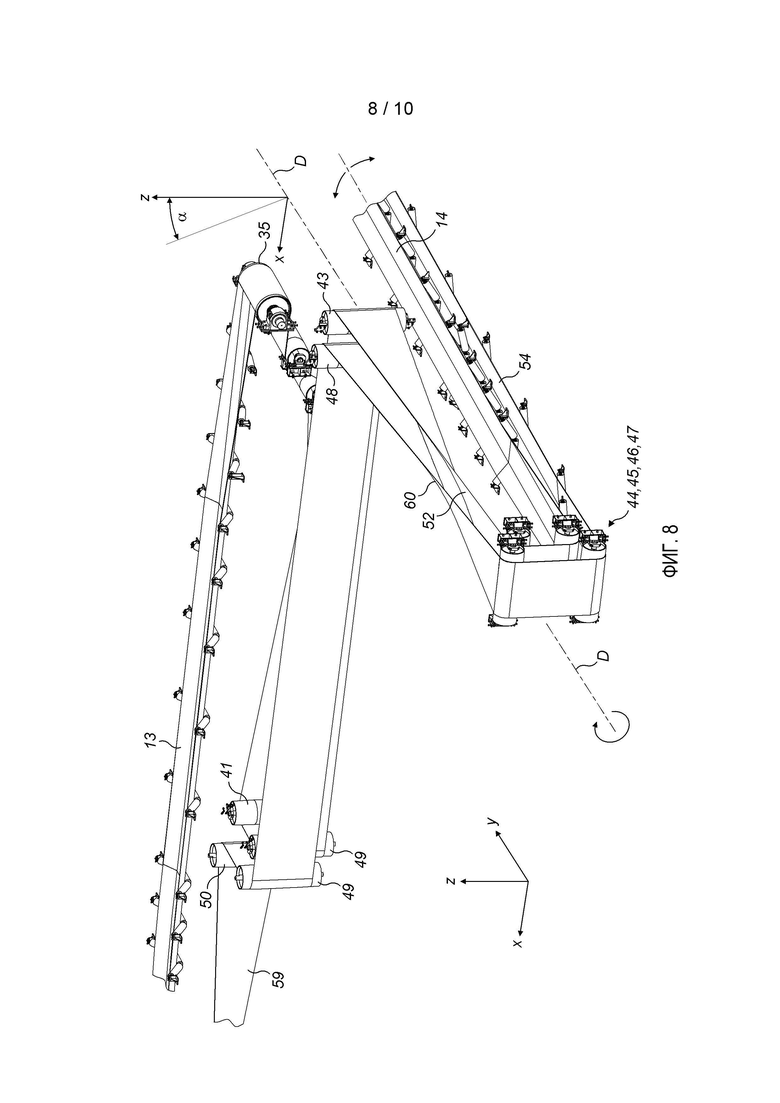
на фиг. 8 изображен другой вид в аксонометрии устройства для отклонения ленты, показанного на фиг. 5, причем рамные секции удалены для наглядности изображения,
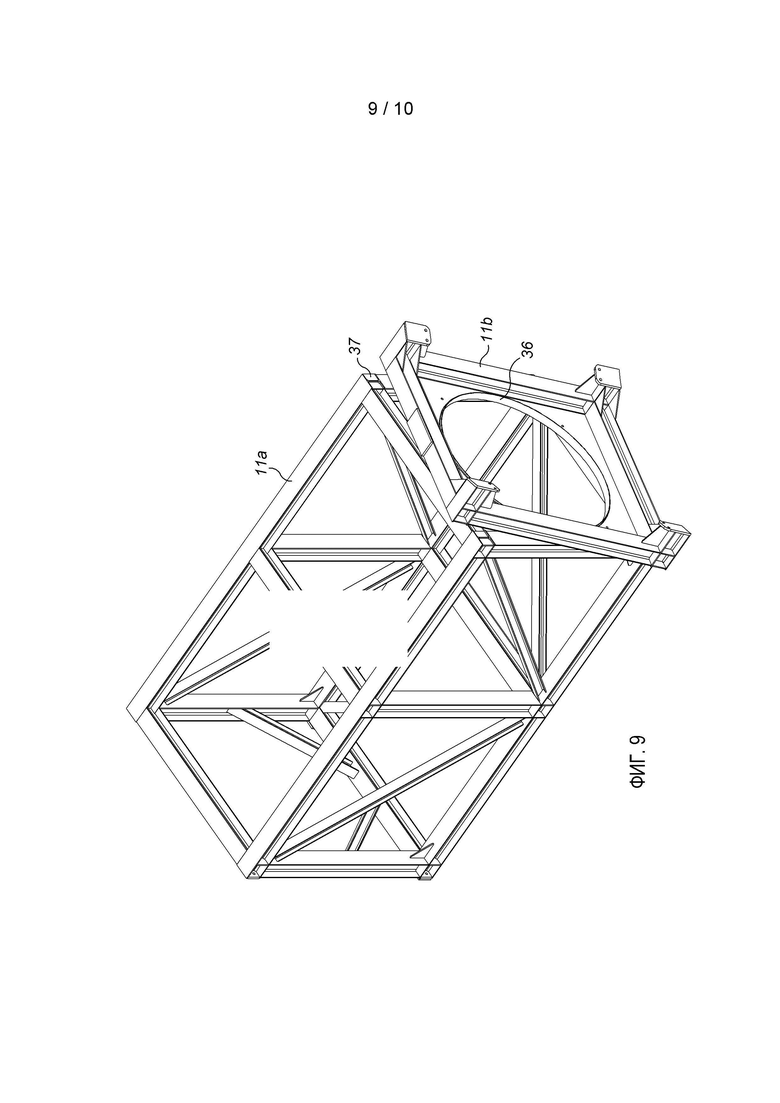
на фиг. 9 изображен вид в аксонометрии примерного регулятора ленты, расположенного в механическом средстве сопряжения между рамными секциями, в соответствии с конкретным вариантом выполнения настоящего изобретения,
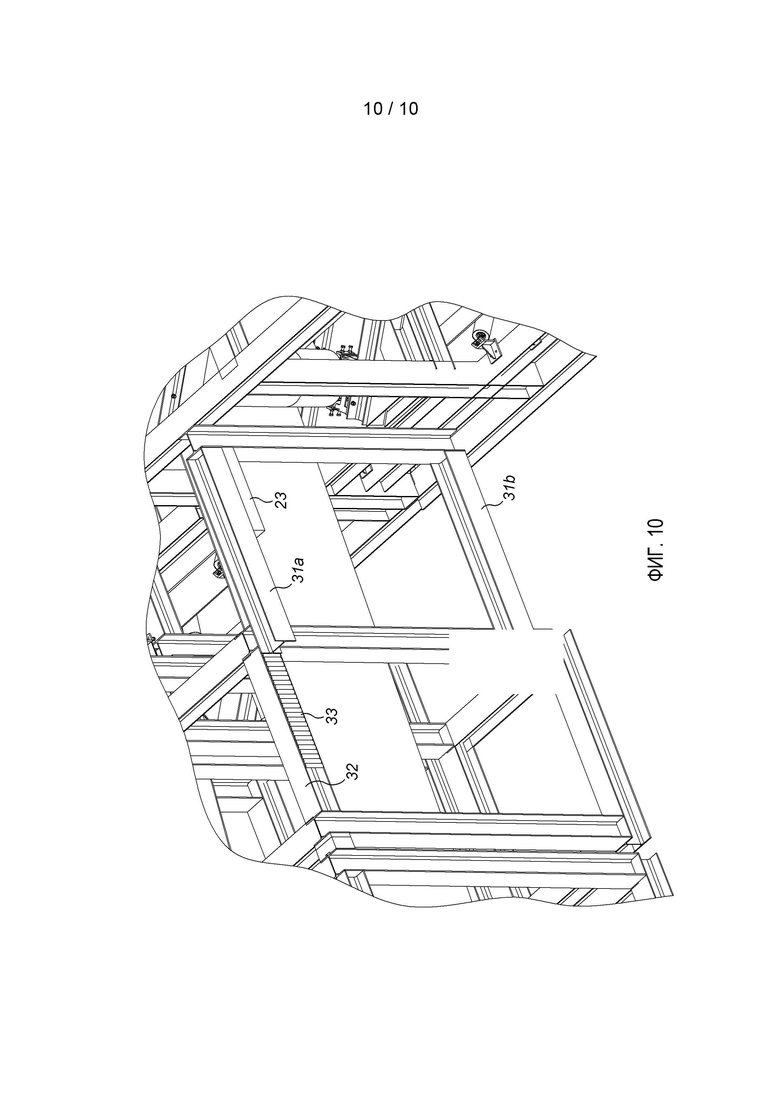
на фиг. 10 изображен увеличенный вид части устройства для отклонения ленты, показанного на фиг. 1, содержащей линейный исполнительный механизм, обеспечивающий линейное вытягивание и втягивание части рамной секции устройства, показанного на фиг. 1, в соответствии с конкретным вариантом выполнения настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В соответствии с фиг. 1-3, устройство для отклонения ленты транспортера содержит по существу жесткую рамную конструкцию, поддерживающую ролики для отклонения ленты, вокруг которых проходит непрерывная или бесконечная лента транспортера. Как вариант, данное устройство может называться устройством для поворота ленты, причем оно пригодно для установки и использования в различных условиях окружающей обстановки, например, в подземной шахте для транспортировки и непрерывной доставки добытого кускового материала, например, внутри шахтных туннелей. Указанное устройство особенно подходит для установки его в месте пересечения шахтных туннелей, проходящих в различных направлениях относительно горизонтальной и вертикальной плоскостей.
В соответствии с конкретным вариантом выполнения предложенное отклоняющее устройство содержит модульную конструкцию с жесткой рамой, образованной из первой секции 10, второй секции 11 и третьей секции 12. Каждая секция 10, 11, 12 образована из взаимно соединенных вытянутых балок, жестко прикрепленных друг к другу своими продольными концами для образования открытой прямоугольной кубовидной конструкции, при этом внутри каждой секции установлен ряд отклоняющих шкивов, вокруг которых проходит натянутая бесконечная лента 15 транспортера. Первая секция 10 имеет первый и второй продольные концы 16, 17, вторая секция 12 имеет первый и второй продольные концы 20, 21, и третья секция 11 также имеет первый и второй продольные концы 18, 19. В конфигурации, отрегулированной без учета геометрии, как показано на фиг. 1-3, длина каждой секции 10, 11, 12 проходит по существу в одной и той же горизонтальной плоскости, соответствующей плоскости х-у. В то время как каждая секция 10, 11, 12 является трехмерной и имеет геометрическую форму, проходящую в направлении z (т.е. в плоскостях x-z и y-z), указанные секции 10, 11, 12 проходят по существу параллельно и занимают приблизительно одну высоту в направлении z.
Бесконечная лента 15 транспортера поддерживается в первой секции 10 с обеспечением прохождения ленты в первом продольном направлении 13. Аналогично, лента 15 поддерживается второй секцией 12 с обеспечением прохождения ленты во втором продольном направлении 14, причем направление 14 по существу перпендикулярно направлению 13, когда устройство ориентировано в конфигурации, показанной на фиг. 1-3, и, в частности, когда длина второй секции 12 по существу перпендикулярна длине первой секции 10. Лента 15 транспортера выполнена с возможностью прохождения в первом направлении 13 и последующего воздействия на нее или отклонения ее положения для прохождения во втором продольном направлении 14. В соответствии с конкретным вариантом выполнения отклонение ленты от первого продольного направления 13 ко второму продольному направлению 14 достигается с помощью роликов для отклонения ленты, установленных по ходу направления перемещения ленты между первой секцией 10 и второй секцией 12. В частности, ролики для отклонения ленты расположены в первой, второй и третьей секциях 10, 11, 12 так, чтобы поддерживать в состоянии натяжения ленту 15 по ее длине по мере перемещения ленты. Ролики для отклонения ленты разнесены в направлении перемещения ленты на оптимальное расстояние, обеспечивающее сведение к минимуму напряжений в ленте и износ ленты, а также получение необходимого распределения натяжения ленты при ее отклонении между первой и второй секциями.
В соответствии с фиг. 1, 3 и 5 лента 15 проходит в первом продольном направлении 13 между первым продольным завершающим концом (не показанным) и вторым продольным завершающим концом 61. Материал, удерживаемый на ленте 15, может транспортироваться в первом направлении 13 до его последующего падения под действием силы тяжести со второго завершающего конца 61 на ленту 15, проходящую во втором продольном направлении 14. Передаче материала от первого продольного направления 13 ко второму продольному направлению 14 способствуют спускной желоб 27 и кожух 28, расположенные на втором завершающем конце 61 и обеспечивающие безударную выгрузку. Желоб 27 имеет модульную или гибкую конструкцию, которая может деформироваться или обеспечивать геометрическое соответствие при манипуляциях с отклоняющим устройством для регулирования ориентации второго продольного направления 14 относительно первого продольного направления 13.
В соответствии с конкретным вариантом выполнения предложенное устройство содержит группу регуляторов ленты, установленных на первой, второй и третьей секциях 10, 11, 12 или между ними так, чтобы обеспечивать возможность геометрического регулирования или изменения положения секций 10, 11, 12 относительно друг друга и, соответственно, обеспечения геометрического/позиционного отклонения ленты 15 для прохождения ее от первого продольного направления 13 ко второму продольному направлению 14. В частности, указанное устройство содержит первый регулятор 25 ленты (выполненный в виде шарнирного пальца или стержня), второй регулятор 26 ленты (выполненный в виде кольцеобразного скользящего средства сопряжения), третий регулятор 22 ленты (выполненный в виде кольцеобразного скользящего средства сопряжения), четвертый регулятор 23 ленты (выполненный, например, в виде по меньшей мере одного линейного гидравлического исполнительного механизма), и пятый регулятор 24 ленты (выполненный в виде кольцеобразного скользящего средства сопряжения). Первый регулятор 25 ленты расположен в направлении второго конца 21 второй секции 11 и выполнен в виде удлиненного шарнирного пальца, имеющего ось, проходящую в направлении z так, чтобы обеспечивать поворот второй секции 11 относительно первой и второй секций 10, 12 по существу в горизонтальной плоскости (соответствующей плоскости х-у). Второй регулятор 26 ленты (выполненный в виде кольцеобразного скользящего средства сопряжения) расположен в месте пересечения так, чтобы обеспечивать промежуточное соединение между вторым концом 19 третьей секции и участком второй секции 11 в направлении второго конца 21 второй секции. Второй регулятор 26 ленты выполнен, соответственно, с возможностью обеспечения «изменения угла наклона» второй секции 11 относительно первой секции 10 путем поворота второй секции 11 вокруг оси, выровненной с длиной первой секции 10 и проходящей в направлении х. Кольцеобразное скользящее средство сопряжения третьего регулятора 22 ленты расположено в месте пересечения первого конца 18 третьей секции 12 и приблизительно среднего по длине участка первой секции 10. В частности, третья секция 12 расположена так, что она проходит по длине вдоль второй половины первой секции 10, при этом третья секция 12 смещена вбок со стороны первой секции 10 так, что при не отрегулированной ориентации, показанной на фиг. 1-3, длина третьей секции 12 параллельна соответствующей длине первой секции 10. То есть первая и третья секции могут проходить бок о бок, причем их соответствующие вторые концы 19, 17 будут приблизительно взаимно совмещены в направлении х. Третий регулятор 22 ленты выполнен с возможностью обеспечения поворота или вращения третьей секции 12 (и, следовательно, второй секции 11) вокруг первой секции 10 для обеспечения эффективного подъема и опускания в вертикальной плоскости (соответствующей плоскости z-x) ленты, проходящей во втором продольном направлении 14 относительно первого продольного направления 13. Четвертый регулятор 23 ленты (образованный по меньшей мере одним линейным исполнительным механизмом, таким как гидравлический силовой цилиндр) расположен на втором конце 19 третьей секции 12, чтобы обеспечивать линейное регулируемое соединение между вторым концом 19 третьей секции и второй секцией 11. Соответственно, путем приведения в действие четвертого регулятора 23 ленты вторая секция 11 может смещаться линейно в направлении х относительно первой секции 10. Соответственно, лента, проходящая во втором продольном направлении 14, может перемещаться в боковом направлении вдоль своей длины, в соответствии с перемещением в направлении х (т.е. ориентацией первого продольного направления 13). Пятый регулятор 24 ленты выполнен в виде другого кольцеобразного скользящего средства сопряжения и расположен в непосредственной близости от четвертого регулятора 23 и продольного участка второй секции 11 вблизи соединения с третьей секцией 12.
Для обеспечения эффективной и экономичной передачи материала с ленты 15, проходящей вдоль первой секции 10, на ленту 15, проходящую вдоль второй секции 11, обращенная вверх поверхность 29 ленты, контактирующая с материалом и проходящая во втором продольном направлении 14, должна быть расположена по существу в одной плоскости с соответствующей поверхностью ленты 15, контактирующей с материалом и проходящей в первом продольном направлении, как проиллюстрировано на фиг. 3, для обеспечения ее ориентирования в соответствии с потоком материала. То есть лента 15 имеет поверхность 29, контактирующую с материалом и обычно обращенную вверх, и соответствующую/противоположную заднюю поверхность 30, обычно обращенную вниз в направлении z. Кроме того, поверхность 29, контактирующая с материалом, и лента, проходящие во втором продольном направлении 14, должны быть расположены непосредственно под вторым завершающим концом 61 ленты в первой секции 10. Эти условия должны быть удовлетворены, чтобы избежать «перекатывания материала» на поверхности 29 и ненадлежащей подачи/передачи материала от первого продольного направления 13 ко второму продольному направлению 14. Выполнения этих условий достигают путем трехмерного позиционного корректирования ориентации ленты, проходящей во втором продольном направлении 14, в плоскостях х-у, z-x и z-y с помощью первого, второго, третьего, четвертого и пятого регуляторов 25, 26, 22, 23, 24 ленты.
На фиг. 4-8 показано устройство, модульные первая, вторая и третья рамные секции 10, 11, 12 которого удалены для наглядности изображения. В соответствии с фиг. 4, первый регулятор 25 ленты выполнен с возможностью обеспечения поворота второй секции 11 (и, следовательно, ленты, проходящей во втором продольном направлении 14) на угол 0 поворота в плоскости х-у (по существу соответствующей горизонтальной плоскости). В соответствии с данным конкретным вариантом выполнения величина угла 0 может быть в диапазоне от 0° до 160°. Благодаря установке оси поворота первого регулятора 25 ленты в непосредственной близости от второго завершающего конца 61 боковое отклонение ленты, проходящей во втором продольном направлении 14 (непосредственно ниже завершающего конца 61) сведено к минимуму при достижении необходимого изменения положения (путем поворота) второй секции 11 в плоскости х-у. В частности, шарнирный палец или ось первого регулятора 25 ленты является осью, выровненной с направлением z, когда устройство ориентировано при не отрегулированной конфигурации, как показано на фиг. 1-3. В соответствии с фиг. 2 и 5, второй регулятор 26 ленты выполнен с возможностью обеспечения поворота второй секции 11 (и, следовательно, ленты, проходящей во втором продольном направлении 14) вокруг оси А, выровненной в направлении х (когда устройство находится в не отрегулированной конфигурации, как показано на фиг. 1-3). Соответственно, секция 11 выполнена с возможностью поворота в плоскости z-y (соответствующей вертикальной плоскости), чтобы смещать под углом или устанавливать под наклоном угловую ориентацию (β) ленты, проходящей во втором продольном направлении 14 относительно ленты, проходящей в первом продольном направлении 13. Такое воздействие может рассматриваться как регулирование геометрии с «изменением угла наклона» второй секции 11 относительно первой секции 10 (и третьей секции 12). Угловое регулирование (по углу β) секции 11 относительно первой секции 10 вокруг оси А может быть выполнено в диапазоне от 20° до 30°. В соответствии с фиг. 2 и 6, третий регулятор 22 ленты выполнен с возможностью обеспечения соответствующего поворота или вращения второй секции 11 (и третьей секции 12) относительно первой секции 10 вокруг оси В поворота, выровненной в направлении у. В частности, ось В проходит по существу перпендикулярно первому продольному направлению 13 и делит пополам первую секцию 11 приблизительно в среднем по длине положении, соответствующем участку прикрепления к третьей секции 12. Соответственно, вторая секция 11 может быть поднята и опущена в плоскости z-x (соответствующей по существу вертикальной плоскости), чтобы поднять или опустить ленту, проходящую во втором продольном направлении 14 относительно первого продольного направления 13. Регулирование по углу о ленты, проходящей во втором продольном направлении 14 вокруг оси В в вертикальной плоскости z-x, может быть выполнено в диапазоне от 15° до 30°.
В соответствии с фиг. 2 и 7, четвертый регулятор 23 ленты выполнен с возможностью обеспечения линейного продольного регулирования длины третьей секции 12 в направлении С, проходящем по существу параллельно направлению х (когда устройство ориентировано при конфигурации, показанной на фиг. 7, т.е. без какого-либо смещения секций 10, 11 и 12 остальными регуляторами 22, 24, 25, 26 ленты). Соответственно, лента, проходящая во втором продольном направлении 14, может быть отрегулирована в боковом направлении (соответствующем направлению Е, перпендикулярному второму продольному направлению 14) с обеспечением смещения ленты во второй секции 11 в направлении ко второму завершающему концу 61 и от него. В соответствии с фиг. 2 и 8, пятый регулятор 24 ленты в виде кольцеобразного скользящего средства сопряжения выполнен с возможностью обеспечения поворота или углового регулирования обращенной вверх поверхности 29 ленты 15, контактирующей с материалом и проходящей во втором продольном направлении 14. Такое угловое регулирование выполняют вокруг продольной оси D, параллельной второму продольному направлению 14, проходящему в направлении у. Регулирование по углу а (путем поворота ленты 15 во второе продольное направление 14) вокруг оси D может быть выполнено в диапазоне от 20° до 30°. Пятый регулятор 24 ленты выполнен с возможностью обеспечения постоянного выравнивания контактирующей с материалом поверхности 29 ленты (в направлении ширины поперек ленты 15) по возможности ближе к ориентации горизонтальной плоскости (плоскости х-у).
Далее со ссылкой на фиг. 9 и 10 приведено описание иллюстративных конкретных вариантов выполнения различных регуляторов ленты. В частности, на фиг. 9 изображено примерное кольцеобразное скользящее средство сопряжения, выполненное с возможностью обеспечения вращения (или поворота) частей (или участков соединения) первой, второй и третьей секций 10, 11 и 12. В частности, как показано в качестве примера на фиг. 9, поворотное средство 37 сопряжения представлено кольцеобразным поворотным кольцом 36, образующим физическое сопряжение или соединение между первой частью 11а и второй частью 11b второй секции 11. Соответственно, первая часть 11а второй секции 11 может поворачиваться вокруг оси D относительно второй части 11b второй секции 11. Скользящее средство 37 сопряжения может быть образовано роликовыми подшипниками, шарикоподшипниками или подвижными пластинами с низкой степенью трения. Скользящее средство 37 сопряжения этого типа, как показано на фиг. 9, может быть использовано для второго, третьего или пятого регуляторов 26, 22, 24 ленты. Как вариант, в соответствии с другими конкретными вариантами выполнения, исполнительный механизм, содержащий шарнирный палец, первого регулятора 25 ленты может быть выполнен в виде скользящего средства 37 сопряжения, как показано на фиг. 9. Как вариант, первый регулятор 25 ленты может быть выполнен в виде скользящего средства 37 сопряжения в дополнение к шарнирному пальцу (или оси), при этом скользящее средство 37 сопряжения, расположено в другом участке вдоль длины второй секции 11 относительно шарнирного пальца, расположенного так, как проиллюстрировано на фиг. 4.
Линейное регулирование, обеспечиваемое четвертым регулятором 23 ленты, может быть выполнено в соответствии с устройством, проиллюстрированным на фиг. 10, в котором линейный исполнительный механизм обеспечивает линейное регулирование первой и второй рамных частей 31а, 31b относительно второй рамной части 32, образующей соответствующие составные части третьей секции 12. В частности, на рамной части 32 может быть выполнена роликовая дорожка 33, обеспечивающая возможность линейного скольжения рамной части 31а, 31b в направлении х, выровненном с первым продольным направлением 13.
В соответствии с фиг. 4-8, указанное устройство содержит множество роликов для отклонения ленты, расположенных в направлении перемещения ленты между лентой, проходящей в первом продольном направлении 13, и лентой, проходящей во втором продольном направлении 14. В частности, концевой ролик 35 ограничивает второй завершающий конец 61 ленты, перемещающейся в первом продольном направлении 13. Затем лента отклоняется посредством первого и второго роликов 38, 39 (оси которых параллельны оси ролика 35) для смещения ее вниз в плоскость z-x. После этого лента проходит вокруг третьего ролика 41, ось которого проходит перпендикулярно осям первого и второго роликов 35, 39 так, что лента закручивается/поворачивается (приблизительно на 90°) в секции 40 хода между вторым и третьим роликами 39, 41. Четвертый ролик 42 имеет ось, параллельную оси третьего ролика 41, при этом он отнесен вбок к одной стороне третьего ролика 41 в направлении у, так что лента проходит вдоль секции 57 хода в боковом направлении (в направлении у) из первой секции 10 в третью секцию 12. Затем лента проходит вдоль секции 51 хода вокруг пятого ролика 43 для отклонения ленты, распложенного во второй секции 11. На первом конце 20 второй секции 11, для обеспечения наличия секции 52 хода ленты между роликами 43, 44, установлен шестой ролик 44 для отклонения ленты. Ролик 44 имеет ось, перпендикулярную оси ролика 43, так что лента закручивается/поворачивается (приблизительно на 90°) по мере ее прохождения вдоль секции 52 хода между роликами 43 и 44. После этого ленту подают вокруг концевого ролика 45, ограничивающего ведущий конец ленты 15, проходящий во втором продольном направлении 14 и вдоль второй секции 11. Концевой ролик 45 имеет ось, параллельную оси ролика 44 и отнесенную на небольшое расстояние в направлении z с ограничением короткой секции 53 хода ленты. После этого ленту подают вокруг противоположного концевого ролика (не показанного) с возвратом в направление прохождения вдоль секции 54 хода непосредственно ниже подачи ленты вокруг концевого ролика 45. Затем лента перемещается вокруг седьмого ролика 46 для отклонения ленты вдоль короткой линейной секции 55 хода и после этого вокруг восьмого ролика 47 для отклонения ленты, также установленного на первом конце 20 второй секции 11. Соответственно, первый конец 20 второй секции 11 обеспечивает опору для группы четырех роликов 44, 45, 46, 47, которые все имеют соответствующие оси, выровненные параллельно (в соответствии с направлением х) и по существу перпендикулярно пятому ролику 43. Затем лента перемещается между роликом 47 и девятым роликом 48 регулятора ленты, расположенным в непосредственной близости от ролика 43 в направлении второго конца 21 второй секции 11. Секция 60 хода ленты между роликами 47 и 48 также закручивается/поворачивается (приблизительно на 90°) в соответствии с той же секцией 52 хода между роликами 43 и 44. Затем лента проходит вокруг десятого ролика 49 для отклонения ленты, расположенного на первом конце 18 третьей секции 12 так, чтобы обеспечивать наличие секции 56 хода ленты между роликами 48 и 49, по существу параллельными и смежными с секцией 51 хода ленты (между роликами 42 и 43). Затем лента перемещается обратно вбок вдоль секции 58 хода в первую секцию 10 на первом конце 18 третьей секции 12. Затем лента проходит вокруг одиннадцатого ролика 50 для отклонения ленты, при этом она отклоняется от бокового направления в секции 58 хода для прохождения в секцию 59 хода, параллельную первому продольному направлению 13 и секции 40 хода ленты. Ролики 41, 42, 43, 48, 49 и 50 все имеют соответствующие оси, выровненные по существу параллельно, когда устройство ориентировано при конфигурации, показанной на фиг. 1-8. Следует понимать, что ориентация этих осей относительно друг друга изменяется, так как секции 10, 11 и 12 (и, следовательно, любой из роликов 38, 39 и 41-50 в отдельности или в сочетании с другими роликами) геометрически преобразуются посредством регуляторов 22, 23, 24, 25 и 26 ленты.
Соответствующие секции 40, 59 хода ленты проходят прямо и непосредственно под лентой, проходящей в первом продольном направлении 13, и во внутреннем участке, ограниченном рамой прямоугольной кубовидной первой секции 10. Подобным образом секции 51 и 56 хода ленты проходят во внутренней конструкции третьей секции 12, при этом секции 52, 60, 54 и 14 хода ленты проходят во внутреннем участке, ограниченном рамой второй секции 11. Первый завершающий конец (не показанный) ограничивает один конец ленты, проходящей в первом продольном направлении 13, а также содержит соответствующий концевой ролик (не показанный) и соответствующую пару роликов для отклонения ленты (не показанных), подобных, соответственно, роликам 35, 38 и 39.
Первый регулятор 25 ленты расположен между роликами 43, 48 для обеспечения смещения группы роликов 44, 45, 46, 47 в плоскости х-у, при этом ось поворота первого регулятора 25 ленты параллельна роликам 43, 48. Расположение опоры второго регулятора 26 ленты обеспечивает соответствующий поворот роликов для отклонения ленты, установленных во второй секции 11 (охватывающей ролики 43-48). Третий регулятор 22 ленты, расположенный в месте пересечения первого конца 18 третьей секции и среднего по длине участка первой секции 11, соответственно выполнен с возможностью обеспечения поворота вокруг оси В роликов во второй и третьей секциях, соответствующих роликам 42 - 49. Линейное регулирование, выполняемое четвертым регулятором 23 ленты, соответственно обеспечивает возможность линейного регулирования в направлении х роликов 43-48 во второй секции 11 относительно роликов 42, 49, установленных на первом конце 18 третьей секции 12. Это линейное регулирование в направлении С соответственно обеспечивает укорочение длины секций 51 и 56 хода ленты. Кроме того, пятый регулятор 24 ленты (обеспечивающий поворот вокруг оси D, выровненной в направлении у) обеспечивает соответствующий поворот ряда роликов 44, 45, 46, 47 на первом конце 20 (и в первой части 11а) второй секции 11 относительно роликов 43, 48, установленных во второй части 11b второй секции 11. Соответственно, степень закручивания ленты в секциях 52, 60 хода может быть отрегулирована для обеспечения соответствующего регулирования ориентации обращенной вверх поверхности 29 ленты, контактирующей с материалом и проходящей во втором продольном направлении 14. В соответствии с этим конкретным вариантом выполнения первый, второй и третий регуляторы 25, 26, 22 ленты могут рассматриваться как регуляторы, обеспечивающие первичное регулирование ленты, проходящей во втором продольном направлении 14, а четвертый и пятый регуляторы 23, 24 ленты могут рассматриваться как регуляторы, обеспечивающие вторичное преобразующее перемещение. В частности, четвертый и пятый регуляторы 23, 24 ленты необходимы для обеспечения точного выравнивания поверхности 29, контактирующей с материалом, и ее расположения непосредственно под завершающим концом 61 ленты, проходящей в первой секции 10. Такая конфигурация является предпочтительной для обеспечения геометрического трехмерного регулирования ленты, проходящей во втором продольном направлении 14, для обеспечения возможности приспособления указанного устройства к необходимой конфигурации, например, к пересечению шахтных туннелей.
Описано устройство для отклонения ленты транспортера, обеспечивающее прохождение ленты между первым продольным направлением и вторым продольным направлением. Указанное устройство содержит группу роликов для отклонения ленты и опорные рамные секции. В различных участках устройства установлены регуляторы ленты, обеспечивающие различное соответствующее регулирование преобразования ленты при ее перемещении от первой секции ко второй секции. Обеспечивается устройство, имеющее возможность регулируемого преобразования ленты, позволяющее удовлетворить широкий диапазон различных требований пользователя и, в частности, совместимое с уже существующей геометрией, с учетом которой кусковой материал необходимо транспортировать от первого участка ко второму участку. 3 н. и 12 з.п. ф-лы, 10 ил.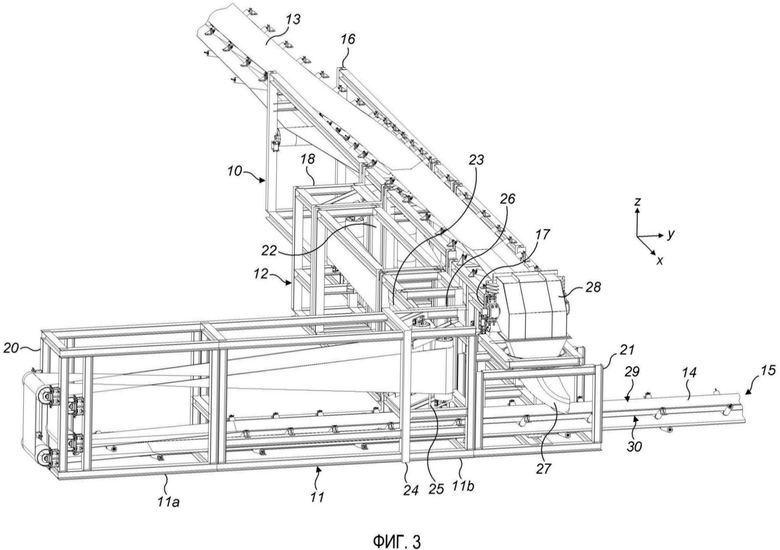
1. Устройство для отклонения ленты (15) транспортера, содержащее
ленту (15) транспортера, предназначенную для транспортирования материала,
первую секцию (10), поддерживающую ленту (15) для прохождения ленты в первом продольном направлении (13) и оканчивающуюся по меньшей мере одним первым концевым роликом (35),
вторую секцию (11), поддерживающую ленту (15) для прохождения ленты во втором продольном направлении (14) и оканчивающуюся по меньшей мере одним вторым концевым роликом (45), причем второе продольное направление (14) проходит поперечно или по существу перпендикулярно первому направлению (13),
ролики (38, 39, 41–44, 46–50) для отклонения ленты, расположенные в направлении хода ленты между первым и вторым концевыми роликами (35, 45) и предназначенные для отклонения ленты (15) и обеспечения ее прохождения от первого продольного направления (13) ко второму продольному направлению (14),
первый регулятор (25) ленты, содержащий первую подвижную связь, установленную в первом месте сопряжения или физического пересечения первой и второй секций, при этом первый регулятор (25) ленты выполнен с возможностью обеспечения поворота второй секции (11) относительно первой секции (10) вокруг оси (z) поворота, перпендикулярной первому продольному направлению (13) и второму продольному направлению (14), для поворота ленты (15), проходящей во второй секции (11), относительно ленты (15), проходящей в первой секции (10), для регулирования угловой ориентации в горизонтальной плоскости между лентой (15), проходящей в первом и втором продольных направлениях (13, 14) в соответствующих первой и второй секциях (10, 11),
отличающееся тем, что оно содержит
второй регулятор (26) ленты, содержащий вторую подвижную связь, установленную во втором месте сопряжения или физического пересечения первой и второй секций, при этом второй регулятор (26) ленты выполнен с возможностью обеспечения поворота второй секции (11) относительно первой секции (10) вокруг оси (А), выровненной с первым продольным направлением (13), для обеспечения первого поворота ленты (15) в положении между первым и вторым концевыми роликами (35, 45) для регулирования угловой ориентации в вертикальной плоскости ленты (15), проходящей во втором продольном направлении (14) во второй секции (11), относительно ленты (15), проходящей в первом продольном направлении (13) в первой секции (10);
при этом ось вращения каждого ролика для отклонения ленты проходит по существу перпендикулярно к продольному направлению ленты в соответствующей контактной области.
2. Устройство по п.1, содержащее третий регулятор (22) ленты, содержащий третью подвижную связь, установленную в третьем месте сопряжения или физического пересечения первой и второй секций, при этом третий регулятор (22) ленты отличается от второго регулятора (26) ленты и выполнен с возможностью обеспечения поворота второй секции (11) относительно первой секции (10) вокруг оси (В) поворота, выровненной со вторым продольным направлением (14) для подъема и опускания в вертикальной плоскости ленты (15) во второй секции (11) относительно ленты (15) в первой секции (10).
3. Устройство по п.1 или 2, содержащее четвертый регулятор (23) ленты, содержащий четвертую подвижную связь, установленную в четвертом месте сопряжения или физического пересечения первой и второй секций, при этом четвертый регулятор (23) ленты выполнен с возможностью обеспечения перемещения второй секции (11) относительно первой секции (10) в первом продольном направлении (13) для обеспечения регулирования в боковом направлении положения ленты (15), проходящей во второй секции (11) в горизонтальной плоскости, относительно первого концевого ролика (35) и в направлении, выровненном с первым продольным направлением (13) с обеспечением выравнивания ленты (15) во второй секции (11) относительно первого концевого ролика (35).
4. Устройство по любому из предшествующих пунктов, содержащее пятый регулятор (24) ленты, содержащий пятую подвижную связь, установленную между первой частью (11а) второй секции (11) и второй частью (11b) второй секции (11), при этом пятый регулятор (24) ленты выполнен с возможностью обеспечения поворота между первой частью (11а) и второй частью (11b) вокруг оси (D), выровненной со вторым продольным направлением (14) для регулирования угла, под которым поверхность (29) ленты (15), по существу обращенная вверх и контактирующая с материалом во второй секции (11), проходит в направлении ширины ленты во второй секции (11) относительно горизонтальной плоскости.
5. Устройство по п.4, в котором первый, второй, третий, четвертый и пятый регуляторы (25, 26, 22, 23, 24) ленты являются отдельными и дополнительными регуляторами по отношению друг к другу.
6. Устройство по любому из предшествующих пунктов, содержащее третью секцию (12), поддерживающую ленту (15) для прохождения ленты от первого концевого ролика (35) до второго концевого ролика (45), причем указанная третья секция (12) установлена между первой и второй секциями (10, 11) с обеспечением физического соединения между этими секциями (10, 11).
7. Устройство по п.6, в котором каждая из первой, второй и третьей секций (10, 11, 12) содержит жесткую раму для установки, соответственно, первого и второго концевых роликов (35, 45), роликов (38, 39, 41–44, 46–50) для отклонения ленты и регуляторов (25, 26, 22, 23, 24) ленты.
8. Устройство по любому из предшествующих пунктов, в котором первый регулятор (25) ленты содержит первый поворотный механизм, обеспечивающий поворот второй секции (11) относительно первой секции (10).
9. Устройство по любому из предшествующих пунктов, зависящему от п.6 или 7, в котором второй регулятор (26) ленты содержит по меньшей мере одно кольцеобразное средство сопряжения, установленное во втором месте сопряжения или физического пересечения второй и третьей секций и воздействующее на указанные ролики (43, 44, 46–48) для отклонения ленты, второй концевой ролик (45) и/или вторую секцию (11) для поворота указанных роликов (43, 44, 46–48) для отклонения ленты, второго концевого ролика (45) и/или второй секции (11) вокруг оси (А), выровненной приблизительно параллельно продольной оси первой секции (10).
10. Устройство по пп.2 и 6 или 7, в котором третий регулятор (22) ленты содержит по меньшей мере одно кольцеобразное средство сопряжения, расположенное между первой и третьей секциями (10, 12) для обеспечения поворота второй и третьей секций (11, 12) вокруг оси (B) поворота, проходящей через первую секцию (10).
11. Устройство по любому из предшествующих пунктов, зависящему от от п.6 или 7, в котором четвертый регулятор (23) ленты содержит по меньшей мере один линейный исполнительный механизм, установленный в четвертом месте сопряжения или физического пересечения второй и третьей секций и выполненный с возможностью регулирования длины третьей секции (12), чтобы вызывать перемещение второй секции (11) к первому концевому ролику (35) и от него в продольном направлении ленты (15) в первой секции (10).
12. Устройство по любому из предшествующих пунктов, зависящему от п.3, в котором пятый регулятор (24) ленты содержит по меньшей мере одно кольцеобразное средство сопряжения, воздействующее на ось вращения второго концевого ролика и выполненное с возможностью обеспечения поворота указанной оси вращения второго концевого ролика (45) для выполнения углового выравнивания контактирующей с материалом поверхности (29) ленты (15) во второй секции (11) в направлении ширины ленты (15) во второй секции (11).
13. Устройство по любому из предшествующих пунктов, в котором лента (15) является бесконечной непрерывной лентой и каждая из первой и второй секций (10, 11) содержит соответствующую пару концевых роликов, содержащую первый и второй концевые ролики (35, 45), поддерживающих ленту (15) для прохождения ленты в первом и втором продольных направлениях (13, 14), при этом поверхность (29) ленты (15), контактирующая с материалом, по существу обращена вверх в первой и второй секциях (10, 11) между соответствующими парами концевых роликов, содержащими первый и второй концевые ролики (35, 45).
14. Блок ленточного транспортера для транспортирования материала между местами расположения, содержащий по меньшей мере одно устройство по любому из пп.1-13.
15. Способ транспортирования материала из первого места расположения во второе место расположения, включающий
приведение в движение ленты (15) транспортера для ее прохождения в первом продольном направлении (13) в первой секции (10), оканчивающейся по меньшей мере одним первым концевым роликом (35),
приведение в движение ленты (15) транспортера для ее прохождения во втором продольном направлении (14) во второй секции (11), оканчивающейся по меньшей мере одним вторым концевым роликом (45), при этом второе продольное направление (14) выровнено поперечно или по существу перпендикулярно первому направлению (10),
отклонение ленты (15) для ее прохождения от первого продольного направления (10) ко второму продольному направлению (14) посредством роликов (38, 39, 41–44, 46–50) для отклонения ленты, расположенных в направлении перемещения ленты между указанными первым и вторым концевыми роликами (35, 45),
поворот ленты (15), проходящей во втором продольном направлении (14) во второй секции (11), относительно ленты (15), проходящей в первом продольном направлении (13) в первой секции (10), вокруг оси поворота для регулирования угловой ориентации в горизонтальной плоскости ленты (15), проходящей в первом и втором продольных направлениях (13, 14) в соответствующих первой и второй секциях (10, 11),
отличающийся тем, что поворачивают ленту (15) в положении между первым и вторым концевыми роликами (35, 45) с помощью второго регулятора (26) ленты для регулирования угловой ориентации в вертикальной плоскости ленты (15), проходящей во втором продольном направлении (14) во второй секции (11), относительно ленты (15), проходящей в первом продольном направлении (13) в первой секции (10),
при этом ось вращения каждого ролика для отклонения ленты проходит по существу перпендикулярно к продольному направлению ленты в соответствующей контактной области.
| Устройство для охлаждения водою паров жидкостей, кипящих выше воды, в применении к разделению смесей жидкостей при перегонке с дефлегматором | 1915 |
|
SU59A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| Токарный резец | 1924 |
|
SU2016A1 |
| Многоканальный генератор импульсов | 1978 |
|
SU746881A1 |
| Токарный резец | 1924 |
|
SU2016A1 |

