ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[0001]
Настоящее изобретение относится к транспортному конвейеру и к транспортному устройству, имеющему такой транспортный конвейер, который содержит бесконечную ленту, намотанную поверх множества намоточных элементов и приводного вращающегося элемента, приводное устройство для транспортирования, предназначенное для приведения во вращение приводного вращающегося элемента, при этом транспортный конвейер обеспечивает транспортирование изделия, размещенного на обращенной вверх, транспортирующей поверхности бесконечной ленты, вдоль направления транспортирования в результате того, что приводной вращающийся элемент приводится во вращение приводным устройством для транспортирования для перемещения бесконечной ленты вдоль ее продольного направления.
Описание предшествующего уровня техники
[0002]
Транспортный конвейер, такой как описанный выше, предусмотрен с входной - в направлении транспортирования - стороны расположенного дальше по ходу конвейера, расположенного дальше по ходу в направлении транспортирования, и используется при транспортировании изделий для перемещения изделий, транспортируемых транспортным конвейером к расположенному дальше по ходу конвейеру. При этом расположенный дальше по ходу конвейер может быть выполнен таким, что его направление транспортирования будет отличаться от направления транспортирования, обеспечиваемого транспортным конвейером. Имеется транспортный конвейер, который выполнен с возможностью его совместимости с расположенным дальше по ходу конвейером даже в том случае, когда направление транспортирования, обеспечиваемое расположенным дальше по ходу конвейером, отличается от направления транспортирования, обеспечиваемого транспортным конвейером (см., например, фиг.1 и 2 патентного документа 1).
В частности, основной конвейер 12 и ответвляющийся боковой конвейер 13 предусмотрены в качестве расположенных дальше по ходу конвейеров в патентном документе 1, и направления транспортирования, обеспечиваемые основным конвейером 12 и ответвляющимся боковым конвейером 13, отличаются друг от друга на 30 градусов. При этом транспортный конвейер (ленточный соединительный конвейер 10), описанный в патентном документе 1, выполнен с конфигурацией, обеспечивающей возможность его переключения между первым состоянием транспортирования, предназначенным для перемещения изделий к основному конвейеру 12, и вторым состоянием транспортирования, предназначенным для перемещений изделий к ответвляющемуся боковому конвейеру 13, для обеспечения возможности надлежащего транспортирования изделий как к основному конвейеру 12, так и к ответвляющемуся боковому конвейеру 13, у которых направления транспортирования отличаются друг от друга.
[0003]
Для описания переключения между первым состоянием транспортирования и вторым состоянием транспортирования для транспортного конвейера по патентному документу 1 следует указать, что транспортный конвейер, описанный в патентном документе 1, включает в себя в качестве множества намоточных элементов первый транспортный намоточный элемент, расположенный в концевой части, расположенной на стороне, соответствующей первому направлению, которое представляет собой одно направление вдоль направления транспортирования, обеспечиваемого транспортирующей частью, которая образует транспортирующую поверхность бесконечной ленты, второй транспортный намоточный элемент, расположенный в концевой части, расположенной на стороне, соответствующей второму направлению, которое представляет собой другое направление вдоль направления транспортирования, обеспечиваемого транспортирующей частью, первый перенаправляющий намоточный элемент, который расположен ниже первого транспортного намоточного элемента и второго транспортного намоточного элемента и который расположен между первым транспортным намоточным элементом и вторым транспортным намоточным элементом вдоль направления транспортирования, и второй перенаправляющий намоточный элемент, который расположен ниже первого транспортного намоточного элемента и второго транспортного намоточного элемента и который расположен с соответствующей второму направлению стороны первого перенаправляющего намоточного элемента вдоль направления транспортирования. Первый транспортный намоточный элемент и первый перенаправляющий намоточный элемент закреплены с возможностью поворота вокруг вертикальной оси, которая проходит вдоль вертикального направления и расположена в концевой части, расположенной на стороне, соответствующей второму направлению.
При этом транспортный конвейер выполнен с такой конфигурацией, что расположенные дальше по ходу конвейеры расположены со стороны, соответствующей первому направлению, и выполнен с конфигурацией, обеспечивающей возможность его перевода из первого состояния транспортирования во второе состояние транспортирования за счет поворота первого транспортного намоточного элемента по часовой стрелке вокруг вертикальной оси на 30 градусов и за счет компенсации растягивания и стягивания транспортирующей части бесконечной ленты, которые возникли в результате поворота первого транспортного намоточного элемента, посредством поворота первого транспортного перенаправляющего намоточного элемента против часовой стрелки вокруг вертикальной оси на 30 градусов.
ДОКУМЕНТЫ ПО ПРЕДШЕСТВУЮЩЕМУ УРОВНЮ ТЕХНИКИ
Патентные документы
[0004]
Патентный документ 1: Публикация заявки на патент Японии № 2009-029620
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Проблемы, подлежащие решению посредством изобретения
[0005]
В транспортном конвейере, описанном в патентном документе 1, первый транспортный намоточный элемент, расположенный в концевой части, расположенной на стороне, соответствующей первому направлению, поворачивают вокруг вертикальной оси, находящейся в концевой части, расположенной на стороне, соответствующей второму направлению; таким образом, радиус поворотного движения первого транспортного намоточного элемента является большим, и, следовательно, количество движения в боковом направлении первого транспортного намоточного элемента является большим при повороте первого транспортного намоточного элемента на заданный угол. Таким образом, требовалось большое пространство в боковом направлении для обеспечения возможности поворота первого транспортного намоточного элемента вокруг вертикальной оси.
[0006]
Соответственно, желательны транспортный конвейер и транспортное устройство, включающее в себя такой транспортный конвейер, в котором транспортный конвейер может быть выполнен компактным в боковом направлении при его одновременной совместимости с расположенным дальше по ходу конвейером даже тогда, когда направление транспортирования, обеспечиваемое расположенным дальше по ходу конвейером, отличается от направления транспортирования, обеспечиваемого транспортным конвейером.
Средства решения проблем
[0007]
Транспортный конвейер в соответствии с настоящим изобретением содержит: бесконечную ленту, намотанную поверх множества намоточных элементов и приводного вращающегося элемента; приводное устройство для транспортирования, предназначенное для приведения во вращение приводного вращающегося элемента, при этом транспортный конвейер обеспечивает транспортирование изделия, размещенного на обращенной вверх, транспортирующей поверхности бесконечной ленты, вдоль направления транспортирования в результате того, что приводной вращающийся элемент приводится во вращение приводным устройством для транспортирования для перемещения бесконечной ленты вдоль ее продольного направления.
При этом в качестве множества намоточных элементов предусмотрены: первый транспортный намоточный элемент, расположенный в концевой части - на соответствующей первому направлению стороне, которая представляет собой одну сторону вдоль направления транспортирования, - транспортирующей части, которая образует транспортирующую поверхность бесконечной ленты; второй транспортный намоточный элемент, расположенный в концевой части - на соответствующей второму направлению стороне, которая представляет собой другую сторону вдоль направления транспортирования, - транспортирующей части; первый перенаправляющий намоточный элемент, который расположен в более низком месте, чем первый транспортный намоточный элемент и второй транспортный намоточный элемент, и который расположен между первым транспортным намоточным элементом и вторым транспортным намоточным элементом вдоль направления транспортирования; второй перенаправляющий намоточный элемент, который расположен в более низком месте, чем первый транспортный намоточный элемент и второй транспортный намоточный элемент, и который расположен с соответствующей второму направлению стороны первого перенаправляющего намоточного элемента вдоль направления транспортирования, при этом бесконечная лента намотана поверх первого транспортного намоточного элемента, второго транспортного намоточного элемента, первого перенаправляющего намоточного элемента, второго перенаправляющего намоточного элемента и первого транспортного намоточного элемента в данном порядке, при этом второй транспортный намоточный элемент, первый перенаправляющий намоточный элемент и второй перенаправляющий намоточный элемент поддерживаются с возможностью поворота вокруг вертикальной оси, проходящей вдоль вертикального направления и расположенной в концевой части транспортного конвейера, расположенной на стороне, соответствующей второму направлению, при этом предусмотрен механизм, обеспечивающий функциональное соединение и предназначенный для обеспечения поворота второго транспортного намоточного элемента, первого перенаправляющего намоточного элемента и второго перенаправляющего намоточного элемента в функционально соединенном состоянии для обеспечения поворота второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента как одного целого вокруг вертикальной оси и для обеспечения поворота первого перенаправляющего намоточного элемента вокруг вертикальной оси в направлении, в котором поворачиваются второй транспортный намоточный элемент и второй перенаправляющий намоточный элемент, и на величину поворота, которая больше величины поворота второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента.
[0008]
То есть, второй транспортный намоточный элемент, первый перенаправляющий намоточный элемент и второй перенаправляющий намоточный элемент поддерживаются с возможностью поворота вокруг вертикальной оси, проходящей вдоль вертикального направления и расположенной в концевой части, которая расположена на стороне, соответствующей второму направлению. При этом механизм, обеспечивающий функциональное соединение, который обеспечивает поворот данных второго транспортного намоточного элемента, первого перенаправляющего намоточного элемента и второго перенаправляющего намоточного элемента в функционально соединенном состоянии выполнен с конфигурацией, обеспечивающей поворот второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента как одного целого вокруг вертикальной оси и обеспечивающей поворот первого перенаправляющего намоточного элемента вокруг вертикальной оси в направлении, в котором поворачиваются второй транспортный намоточный элемент и второй перенаправляющий намоточный элемент, и на величину поворота, которая больше величины поворота второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента.
[0009]
Другими словами, форма расположенной на соответствующей второму направлению стороне, концевой части транспортирующей части бесконечной ленты может быть изменена посредством обеспечения поворота второго транспортного намоточного элемента вокруг вертикальной оси. Таким образом, когда расположенный дальше по ходу конвейер расположен дальше по ходу относительно транспортного конвейера и примыкает к транспортному конвейеру, форма транспортирующей части может быть выполнена совместимой с направлением транспортирования, которое обеспечивается конвейером, расположенным дальше по ходу, который расположен дальше по ходу относительно нее и примыкает к ней, что затрудняет образование зазора между транспортным конвейером и конвейером, расположенным дальше по ходу, и что облегчает перемещение изделия с транспортного конвейера на расположенный дальше по ходу конвейер.
Кроме того, за счет обеспечения поворота первого перенаправляющего намоточного элемента вокруг вертикальной оси в направлении, в котором поворачиваются второй транспортный намоточный элемент и второй перенаправляющий намоточный элемент, и на величину поворота, которая больше величины поворота второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента на заданную величину, могут быть компенсированы растягивание и стягивание транспортирующей части бесконечной ленты, которые возникли вследствие обеспечения поворота второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента вокруг вертикальной оси, так что может быть уменьшена величина изменения длины траектории намотки в каждом месте вдоль направления ширины ленты. В частности, величина изменения длины траектории намотки в каждом месте вдоль направления ширины ленты может быть надлежащим образом уменьшена за счет задания величины поворота первого перенаправляющего намоточного элемента такой, чтобы она в два раза превышала величину поворота второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента.
[0010]
При этом, поскольку второй транспортный намоточный элемент расположен в расположенной на соответствующей второму направлению стороне, концевой части транспортирующей части бесконечной ленты и вертикальная ось расположена в концевой части транспортного конвейера, расположенной на соответствующей второму направлению стороне транспортного конвейера, радиус поворота второго транспортного намоточного элемента короче, чем радиус его поворота в том случае, когда вертикальная ось расположена в концевой части транспортного конвейера, расположенной на соответствующей первому направлению стороне транспортного конвейера. Таким образом, величина перемещения второго транспортного намоточного элемента при обеспечении поворота второго транспортного намоточного элемента на заданный угол становится меньше в боковом направлении транспортного конвейера; таким образом, поворот второго транспортного намоточного элемента вокруг вертикальной оси может быть выполнен в малом пространстве.
По существу стало возможным выполнение транспортного конвейера, который может быть сделан компактным в боковом направлении при одновременной совместимости с расположенным дальше по ходу конвейером даже тогда, когда направление транспортирования, обеспечиваемое расположенным дальше по ходу конвейером, отличается от направления транспортирования, обеспечиваемого транспортным конвейером.
[0011]
Примеры предпочтительных вариантов осуществления транспортного конвейера в соответствии с настоящим изобретением описаны далее.
[0012]
В одном варианте осуществления транспортного конвейера в соответствии с настоящим изобретением каждый из первого транспортного намоточного элемента, второго транспортного намоточного элемента, первого перенаправляющего намоточного элемента и второго перенаправляющего намоточного элемента предпочтительно выполнен с возможностью вращения вокруг горизонтальной оси при перемещении бесконечной ленты вдоль ее продольного направления.
[0013]
То есть, каждый из первого транспортного намоточного элемента, второго транспортного намоточного элемента, первого перенаправляющего намоточного элемента и второго перенаправляющего намоточного элемента вращается вокруг горизонтальной оси при перемещении бесконечной ленты вдоль ее продольного направления. Это затрудняет возникновение истирания между бесконечной лентой и каждым из первого транспортного намоточного элемента, второго транспортного намоточного элемента, первого перенаправляющего намоточного элемента и второго перенаправляющего намоточного элемента, таким образом, уменьшается какое-либо выделение тепла при одновременном повышении долговечности транспортного конвейера.
[0014]
В одном варианте осуществления транспортного конвейера в соответствии с настоящим изобретением предпочтительно предусмотрены: первая опорная рама, которая обеспечивает опору для первого перенаправляющего намоточного элемента и выполнена с возможностью поворота вокруг вертикальной оси; вторая опорная рама, которая обеспечивает опору для второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента и выполнена с возможностью поворота вокруг вертикальной оси, и базовая рама, которая обеспечивает опору для первого транспортного намоточного элемента и зафиксирована от перемещения вокруг вертикальной оси, при этом приводной вращающийся элемент и приводное устройство для транспортирования предпочтительно опираются на базовую раму.
[0015]
То есть, при обеспечении поворота второго транспортного намоточного элемента, первого перенаправляющего намоточного элемента и второго перенаправляющего намоточного элемента вокруг вертикальной оси необходимо только обеспечить поворот первой опорной рамы и второй опорной рамы, которые обеспечивают опору для данных намоточных элементов, вокруг вертикальной оси относительно базовой рамы, в то время как базовая рама, которая обеспечивает опору для приводного вращающегося элемента и приводного устройства для транспортирования, не поворачивается. Таким образом, отсутствует необходимость в обеспечении линии подачи электропитания для подачи электропитания к приводному устройству для транспортирования для обеспечения возможности его поворота вокруг вертикальной оси, что облегчает выполнение приводного устройства для транспортирования.
[0016]
В одном варианте осуществления транспортного конвейера в соответствии с настоящим изобретением механизм, обеспечивающий функциональное соединение, предпочтительно включает в себя первый элемент, обеспечивающий функциональное соединение, который функционально соединяет первый перенаправляющий намоточный элемент с приводным устройством для поворота, и второй элемент, обеспечивающий функциональное соединение, который функционально соединяет второй транспортный намоточный элемент и второй перенаправляющий намоточный элемент с приводным устройством для поворота, при этом механизм, обеспечивающий функциональное соединение, предпочтительно выполнен с конфигурацией, обеспечивающей перемещение первого элемента, обеспечивающего функциональное соединение, и второго элемента, обеспечивающего функциональное соединение, под действием приводного усилия, создаваемого приводным устройством для поворота, для обеспечения поворота первого перенаправляющего намоточного элемента, второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента в функционально соединенном состоянии.
[0017]
То есть, может быть обеспечено перемещение первого элемента, обеспечивающего функциональное соединение, и второго элемента, обеспечивающего функциональное соединение, под действием приводного усилия, создаваемого приводным устройством для поворота, для обеспечения поворота первого перенаправляющего намоточного элемента, второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента в функционально соединенном состоянии. Другими словами, необходимо обеспечить только одно приводное устройство для перемещения первого элемента, обеспечивающего функциональное соединение, и второго элемента, обеспечивающего функциональное соединение. Таким образом, число приводных устройств может быть уменьшено по сравнению со случаем, в котором приводное устройство для приведение в действие первого элемента, обеспечивающего функциональное соединение, и приводное устройство для приведения в действие второго элемента, обеспечивающего функциональное соединение, предусмотрены отдельно. Это также облегчает синхронное приведение в действие первого элемента, обеспечивающего функциональное соединение, и второго элемента, обеспечивающего функциональное соединение.
[0018]
Транспортное устройство в соответствии с настоящим изобретением представляет собой транспортное устройство, которое предусмотрено с одним из транспортных конвейеров, описанных выше, и в котором предусмотрен соседний конвейер, расположенный с соответствующей второму направлению стороны транспортного конвейера и рядом с транспортным конвейером, при этом механизм, обеспечивающий функциональное соединение, выполнен с конфигурацией, обеспечивающей поворот соседнего конвейера, второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента в функционально соединенном состояниидля обеспечения поворота соседнего конвейера, второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента как одного целого вокруг вертикальной оси.
[0019] То есть, когда второй транспортный намоточный элемент и второй перенаправляющий намоточный элемент поворачиваются вокруг вертикальной оси и угол концевой части транспортного конвейера, расположенной на стороне, соответствующей второму направлению, изменяется, соседний конвейер поворачивается на такой же угол, как данный угол, в результате чего затрудняется образование зазора между транспортным конвейером и соседним конвейером и облегчается перемещение изделие с транспортного конвейера на соседний конвейер.
При этом, поскольку соседний конвейер поворачивается вокруг вертикальной оси, в том случае, когда, например, множество или пара расположенных дальше по ходу конвейеров предусмотрены так, что они будут расположены рядом друг с другом в боковом направлении и с соответствующей второму направлению стороны соседнего конвейера (со стороны, противоположной по отношению к транспортному конвейеру относительно направления транспортирования), изделие может быть перемещено к каждому из пары конвейеров, расположенных дальше по ходу.
Кроме того, не требуется, чтобы соседний конвейер представлял собой конвейер специальной конструкции, в котором некоторые из намоточных элементов из множества намоточных элементов поворачиваются, как в случае транспортного конвейера; таким образом, не требуется, чтобы соседний конвейер имел объекты, которые эквивалентны первому перенаправляющему намоточному элементу и второму перенаправляющему намоточному элементу транспортного конвейера. Это облегчает выполнение соседнего конвейера более компактным в вертикальном направлении и выполнение соседнего конвейера более легким по весу, чем транспортный конвейер. Кроме того, при выполнении соседнего конвейера более компактным в вертикальном направлении по сравнению с транспортным конвейером механизм, обеспечивающий функциональное соединение, может быть расположен под соседним конвейером, что обеспечивает возможность выполнения всего транспортного устройства более компактным по размеру на виде в плане. Кроме того, все направления поворотов второго транспортного намоточного элемента, первого перенаправляющего намоточного элемента, второго перенаправляющего намоточного элемента и соседнего конвейера вокруг вертикальной оси являются идентичными, что способствует выполнению более простой конструкции, предназначенной для поворота данных элементов.
[0020]
Далее описаны примеры предпочтительных вариантов осуществления транспортного устройства по настоящему изобретению.
[0021]
В одном варианте осуществления транспортного устройства в соответствии с настоящим изобретением соседний конвейер предпочтительно выполнен с возможностью поворота вокруг вертикальной оси, при этом механизм, обеспечивающий функциональное соединение, предпочтительно включает в себя первый элемент, обеспечивающий функциональное соединение, который функционально соединяет первый перенаправляющий намоточный элемент с приводным устройством для поворота, и второй элемент, обеспечивающий функциональное соединение, который функционально соединяет второй транспортный намоточный элемент и второй перенаправляющий намоточный элемент с приводным устройством для поворота, третий элемент, обеспечивающий функциональное соединение, который функционально соединяет соседний конвейер с приводным устройством для поворота, при этом механизм, обеспечивающий функциональное соединение, предпочтительно выполнен с конфигурацией, обеспечивающей перемещение первого элемента, обеспечивающего функциональное соединение, второго элемента, обеспечивающего функциональное соединение, и третьего элемента, обеспечивающего функциональное соединение, под действием приводного усилия, создаваемого приводным устройством для поворота, для обеспечения поворота первого перенаправляющего намоточного элемента, второго транспортного намоточного элемента, второго перенаправляющего намоточного элемента и соседнего конвейера в функционально соединенном состоянии.
[0022]
То есть, может быть обеспечено перемещение первого элемента, обеспечивающего функциональное соединение, второго элемента, обеспечивающего функциональное соединение, и третьего элемента, обеспечивающего функциональное соединение, под действием приводного усилия, создаваемого приводным устройством для поворота, для обеспечения поворота первого перенаправляющего намоточного элемента, второго транспортного намоточного элемента, второго перенаправляющего намоточного элемента и соседнего конвейера в функционально соединенном состоянии. Другими словами, необходимо обеспечить только одно приводное устройство для перемещения первого элемента, обеспечивающего функциональное соединение, второго элемента, обеспечивающего функциональное соединение, и третьего элемента, обеспечивающего функциональное соединение. Таким образом, число приводных устройств может быть уменьшено по сравнению со случаем, в котором приводное устройство для приведения в действие первого элемента, обеспечивающего функциональное соединение, приводное устройство для приведения в действие второго элемента, обеспечивающего функциональное соединение, и приводное устройство для приведения в действие третьего элемента, обеспечивающего функциональное соединение, предусмотрены отдельно. Это также облегчает синхронное приведение в действие первого элемента, обеспечивающего функциональное соединение, второго элемента, обеспечивающего функциональное соединение, и третьего элемента, обеспечивающего функциональное соединение.
[0023]
В одном варианте осуществления транспортного устройства в соответствии с настоящим изобретением второй транспортный намоточный элемент и второй перенаправляющий намоточный элемент предпочтительно присоединены к соседнему конвейеру для поворота как одно целое с соседним конвейером вокруг вертикальной оси, при этом второй элемент, обеспечивающий функциональное соединение, предпочтительно образован третьим элементом, обеспечивающим функциональное соединение, и соседним конвейером, и при этом первый элемент, обеспечивающий функциональное соединение, и третий элемент, обеспечивающий функциональное соединение, предпочтительно предусмотрены в более низких местах, чем соседний конвейер.
[0024]
То есть, поскольку второй элемент, обеспечивающий функциональное соединение, образован третьим элементом, обеспечивающим функциональное соединение, и соседним конвейером, отсутствует необходимость в выполнении отдельного элемента, обеспечивающего функциональное соединение, для обеспечения поворота второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента вокруг вертикальной оси, что способствует упрощению конструкции механизма, обеспечивающего функциональное соединение.
Кроме того, при выполнении первого элемента, обеспечивающего функциональное соединение, и третьего элемента, обеспечивающего функциональное соединение, с использованием пространства под соседним конвейером, ширина которого в вертикальном направлении выполнена компактной, транспортное устройство может быть выполнено компактным на виде в плане по сравнению со случаем, в котором данные первый элемент, обеспечивающий функциональное соединение, и третий элемент, обеспечивающий функциональное соединение, расположены в месте с боковой стороны транспортного конвейера или соседнего конвейера.
[0025]
В одном варианте осуществления транспортного устройства в соответствии с настоящим изобретением первая опорная рама, которая обеспечивает опору для первого перенаправляющего намоточного элемента, предпочтительно предусмотрена с возможностью поворота вокруг вертикальной оси, при этом вторая опорная рама, которая обеспечивает опору для второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента, предпочтительно присоединена к соседнему конвейеру для поворота как одно целое с соседним конвейером вокруг вертикальной оси, при этом второй элемент, обеспечивающий функциональное соединение, предпочтительно образован третьим элементом, обеспечивающим функциональное соединение, и соседним конвейером, при этом при месте, в котором первый элемент, обеспечивающий функциональное соединение, присоединен к первой опорной раме, определяемом как первое место соединения, и при месте, в котором третий элемент, обеспечивающий функциональное соединение, присоединен к соседнему конвейеру, определяемом как второе место соединения, механизм, обеспечивающий функциональное соединение, предпочтительно выполнен с такой конфигурацией, что первое место соединения и второе место соединения перемещаются вокруг вертикальной оси в одном и том же направлении и на одно и то же расстояние по прямой линии в результате того, что первый элемент, обеспечивающий функциональное соединение, и третий элемент, обеспечивающий функциональное соединение, перемещаются на заданную величину за счет приведения в действие приводного устройства для поворота, при этом соотношение между первым радиусом поворота, который представляет собой расстояние от вертикальной оси до первого места соединения, и вторым радиусом поворота, который представляет собой расстояние от вертикальной оси до второго места соединения, предпочтительно задано на основе соотношения между величиной поворота первой опорной рамы и величиной поворота второй опорной рамы.
[0026] То есть, поскольку второй элемент, обеспечивающий функциональное соединение, образован третьим элементом, обеспечивающим функциональное соединение, и соседним конвейером, отсутствует необходимость в выполнении отдельного элемента, обеспечивающего функциональное соединение, для обеспечения поворота второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента вокруг вертикальной оси, что способствует упрощению конструкции механизмов, обеспечивающих функциональное соединение.
При этом за счет перемещения первого места соединения и второго места соединения вокруг вертикальной оси в одном и том же направлении и на одно и то же расстояние по прямой линии при перемещении первого элемента, обеспечивающего функциональное соединение, и третьего элемента, обеспечивающего функциональное соединение, может быть обеспечен поворот первой опорной рамы вокруг вертикальной оси в направлении, в котором поворачиваются вторая опорная рама и соседний конвейер, и на величину, которая превышает величину поворота второй опорной рамы и соседнего конвейера на заданную величину.
При обеспечении поворота первой опорной рамы вокруг вертикальной оси в направлении, в котором поворачиваются вторая опорная рама и соседний конвейер, и на величину поворота, которая превышает (например, вдвое) величину поворота второй опорной рамы и соседнего конвейера, направление поворота и расстояние перемещения первого места соединения, перемещаемого посредством первого элемента, обеспечивающего функциональное соединение, и направление поворота и расстояние перемещения второго места соединения, перемещаемого посредством третьего элемента, обеспечивающего функциональное соединение, являются одинаковыми, что облегчает проектирование механизма, обеспечивающего функциональное соединение и имеющего данные первый элемент, обеспечивающий функциональное соединение, и третий элемент, обеспечивающий функциональное соединение.
Между тем, при перемещении первого места соединения и второго места соединения на одно и то же расстояние по прямой линии (длину хорды), как описано выше, для обеспечения поворота первой опорной рамы на угол θ1 и для обеспечения поворота соседнего конвейера и второй опорной рамы на угол θ2 соотношение между первым радиусом r1 поворота, который представляет собой расстояние от вертикальной оси до первого места соединения, и вторым радиусом r2 поворота, который представляет собой расстояние от вертикальной оси до второго места соединения, задано выражением
2⋅r1⋅sin(θ1/2)=2⋅r2⋅sin(θ2/2).
Следует отметить, что единица измерения углов представляет собой радиан.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0027]
Фиг.1 представляет собой вид в перспективе транспортного устройства в состоянии, в котором ответвляющийся конвейер переведен в состояние транспортирования прямо вперед;
фиг.2 представляет собой вид в перспективе транспортного устройства в состоянии, в котором ответвляющийся конвейер переведен в состояние транспортирования в направлении ответвления;
фиг.3 представляет собой вид сбоку ответвляющегося конвейера;
фиг.4 представляет собой выполненный с частичным вырывом вид в плане ответвляющегося конвейера, переведенного в состояние транспортирования прямо вперед;
фиг.5 представляет собой выполненный с частичным вырывом вид в плане ответвляющегося конвейера, переведенного в состояние транспортирования в направлении ответвления;
фиг.6 представляет собой вертикальный вид спереди в разрезе приемного конвейера;
фиг.7 представляет собой вид в плане, показывающий транспортное устройство по альтернативному варианту (1) осуществления, когда оно обеспечивает транспортирование изделий к расположенному дальше по ходу конвейеру для транспортирования прямо вперед;
фиг.8 представляет собой вид в плане, показывающий транспортное устройство по альтернативному варианту (1) осуществления, когда оно обеспечивает транспортирование изделий к расположенному дальше по ходу конвейеру для транспортирования в направлении ответвления;
фиг.9 представляет собой вид в плане ответвляющегося устройства по альтернативному варианту (2) осуществления, в котором его механизм, обеспечивающий функциональное соединение, представляет собой механизм с ручным управлением;
фиг.10 представляет собой выполненный с вырывом вид в плане механизма, обеспечивающего функциональное соединение, по альтернативному варианту (2) осуществления;
фиг.11 представляет собой вид сбоку механизма, обеспечивающего функциональное соединение, по альтернативному варианту (2) осуществления;
фиг.12 представляет собой вид в плане транспортного устройства по альтернативному варианту (3) осуществления, в котором его ответвляющийся конвейер образован двумя приемными конвейерами и одним поворотным конвейером;
фиг.13 представляет собой вид в плане транспортного устройства по альтернативному варианту (3) осуществления, в котором его ответвляющийся конвейер образован одним приемным конвейером; и
фиг.14 представляет собой вид в плане механизма, обеспечивающего функциональное соединение, по альтернативному варианту (2) осуществления.
ВАРИАНТЫ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0028]
Варианты осуществления транспортного устройства, включающего в себя приемный конвейер, который функционирует в качестве транспортного конвейера, описаны далее со ссылкой на чертежи.
Как показано на фиг.1 и 2, транспортное устройство включает в себя ответвляющийся конвейер 1, который функционирует в качестве транспортного модуля, расположенный впереди по ходу конвейер 2 и расположенные дальше по ходу конвейеры 3. Конвейер 2, расположенный впереди по ходу, смонтирован с входной стороны ответвляющегося конвейера 1 относительно направления транспортирования, в то время как два конвейера 3, расположенные дальше по ходу, а именно расположенный дальше по ходу конвейер 3а, предназначенный для транспортирования прямо вперед, и расположенный дальше по ходу конвейер 3b, предназначенный для транспортирования в направлении ответвления, смонтированы с выходной стороны ответвляющегося конвейера 1 относительно направления транспортирования.
[0029]
Транспортное устройство выполнено с конфигурацией, обеспечивающей возможность транспортирования изделий, транспортируемых с конвейера 2, расположенного впереди по ходу, избирательно к расположенному дальше по ходу конвейеру 3а, предназначенному для транспортирования прямо вперед, и к расположенному дальше по ходу конвейеру 3b, предназначенному для транспортирования в направлении ответвления, за счет перевода ответвляющегося конвейера 1 в состояние транспортирования прямо вперед (см. фиг.1) или в состояние транспортирования в направлении ответвления (см. фиг.2).
Следует отметить, что в данном варианте осуществления направление транспортирования (направление ответвления), обеспечиваемое расположенным дальше по ходу конвейером 3b, предназначенным для транспортирования в направлении ответвления, имеет наклон в направлении против часовой стрелки на 30 градусов на виде в плане относительно направления транспортирования (направления транспортирования прямо вперед), обеспечиваемого расположенным впереди по ходу конвейером 2 и расположенным дальше по ходу конвейером 3а, предназначенным для транспортирования прямо вперед. Кроме того, горизонтальное направление, которое перпендикулярно направлению транспортирования прямо вперед, может быть иногда названо поперечным/боковым направлением.
[0030]
Ответвляющийся конвейер 1 состоит из приемного конвейера 5 (который соответствует транспортному конвейеру по настоящему изобретению) и поворотного конвейера 6 (который соответствует соседнему конвейеру по настоящему изобретению), предусмотренного рядом с данным приемным конвейером 5 и за данным приемным конвейером 5 относительно направления транспортирования. В данном варианте осуществления в ответвляющемся конвейере 1 входная/расположенная впереди по ходу сторона приемного конвейера 5 относительно направления транспортирования определена как сторона, соответствующая первому направлению, которая представляет собой одну сторону относительно направления транспортирования, в то время как выходная/расположенная дальше по ходу сторона приемного конвейера 5 относительно направления транспортирования определена как сторона, соответствующая второму направлению, которая представляет собой другую сторону относительно направления транспортирования.
[0031]
Ответвляющийся конвейер 1 выполнен с конфигурацией, обеспечивающей возможность его перевода в состояние транспортирования прямо вперед для транспортирования изделий к расположенному дальше по ходу конвейеру 3а, предназначенному для транспортирования прямо вперед, как показано на фиг.1 и 4, и в состояние транспортирования в направлении ответвления для транспортирования изделий к расположенному дальше по ходу конвейеру 3b, предназначенному для транспортирования в направлении ответвления, как показано на фиг.2 и 5. При этом ответвляющийся конвейер 1 выполнен с конфигурацией, обеспечивающей возможность транспортирования изделий, транспортируемых с конвейера 2, расположенного впереди по ходу, к расположенному дальше по ходу конвейеру 3а, предназначенному для транспортирования прямо вперед, при его переводе в состояние транспортирования прямо вперед, и возможность транспортирования изделий, транспортируемых с конвейера 2, расположенного впереди по ходу, к расположенному дальше по ходу конвейеру 3b, предназначенному для транспортирования в направлении ответвления, при его переводе в состояние транспортирования в направлении ответвления. Следует отметить, что некоторые части показаны с вырывом на фиг.4 и 5.
[0032]
Далее описана особая конструкция приемного конвейера 5.
Как показано на фиг.3-5, приемный конвейер 5 выполнен с вращающимися элементами 8-11 в качестве множества намоточных элементов (первым транспортирующим вращающимся элементом 8, вторым транспортирующим вращающимся элементом 9, первым перенаправляющим вращающимся элементом 10 и вторым перенаправляющим вращающимся элементом 11), приемной бесконечной лентой 14 в качестве бесконечной ленты, которая намотана поверх приводного вращающегося элемента 12 и натяжного вращающегося элемента 13, и электродвигателем 15 приемного транспортного конвейера, функционирующим в качестве приводного устройства для транспортирования, которое приводит во вращение приводной вращающийся элемент 12. При этом приемный конвейер 5 выполнен с конфигурацией, обеспечивающей возможность транспортирования изделий, размещенных на обращенной вверх, транспортирующей поверхности приемной бесконечной ленты 14 вдоль направления транспортирования (направления транспортирования прямо вперед) в результате того, что приводной вращающийся элемент 12 приводится во вращение посредством электродвигателя 15 приемного транспортного конвейера для обеспечения перемещения приемной бесконечной ленты 14 вдоль ее продольного направления.
[0033]
Первый транспортирующий вращающийся элемент 8 предусмотрен в концевой части на входной стороне приемного конвейера 5 относительно направления транспортирования (концевой части - на одной стороне (соответствующей первому направлению стороне) относительно направления транспортирования - транспортирующей части 14а приемной бесконечной ленты 14), в то время как второй транспортирующий вращающийся элемент 9 предусмотрен в концевой части на выходной стороне приемного конвейера 5 относительно направления транспортирования (концевой части - на другой стороне (соответствующей второму направлению стороне) относительно направления транспортирования - транспортирующей части 14а приемной бесконечной ленты 14).
Кроме того, первый перенаправляющий вращающийся элемент 10 выполнен с возможностью его размещения в более низком месте, чем первый транспортный вращающийся элемент 8 и второй транспортный вращающийся элемент 9, и с возможностью его размещения между первым транспортирующим вращающимся элементом 8 и вторым транспортирующим вращающимся элементом 9 вдоль направления транспортирования. Второй перенаправляющий вращающийся элемент 11 выполнен с возможностью его размещения в более низком месте, чем первый транспортирующий вращающийся элемент 8 и второй транспортирующий вращающийся элемент 9, и с возможностью его размещения по ходу за первым перенаправляющим вращающимся элементом 10 относительно направления транспортирования. В данном варианте осуществления второй перенаправляющий вращающийся элемент 11 расположен непосредственно под вторым транспортирующим вращающимся элементом 9 (то есть в одном и том же положении на виде в плане). Приводной вращающийся элемент 12 расположен между первым транспортирующим вращающимся элементом 8 и первым перенаправляющим вращающимся элементом 10 вдоль направления транспортирования. Натяжной вращающийся элемент 13 выполнен с возможностью его размещения по ходу перед приводным вращающимся элементом 12 относительно направления транспортирования и, более конкретно, между первым транспортирующим вращающимся элементом 8 и приводным вращающимся элементом 12 вдоль направления транспортирования.
Кроме того, первый транспортирующий вращающийся элемент 8 и второй транспортирующий вращающийся элемент 9 расположены на одинаковой высоте. Первый перенаправляющий вращающийся элемент 10 и приводной вращающийся элемент 12 расположены на одинаковой высоте. При этом второй перенаправляющий вращающийся элемент 11 и натяжной вращающийся элемент 13 расположены на одинаковой высоте.
[0034]
Приемная бесконечная лента 14 намотана поверх первого транспортирующего вращающегося элемента 8, второго транспортирующего вращающегося элемента 9, первого перенаправляющего вращающегося элемента 10, второго перенаправляющего вращающегося элемента 11, натяжного вращающегося элемента 13, приводного вращающегося элемента 12 и первого транспортирующего вращающегося элемента 8 в данном порядке. При этом транспортирующая поверхность образована обращенной вверх поверхностью транспортирующей части 14а, расположенной между первым транспортирующим вращающимся элементом 8 и вторым транспортирующим вращающимся элементом 9.
[0035]
Каждый из первого транспортирующего вращающегося элемента 8, второго транспортирующего вращающегося элемента 9, первого перенаправляющего вращающегося элемента 10, второго перенаправляющего вращающегося элемента 11, приводного вращающегося элемента 12 и натяжного вращающегося элемента 13 предусмотрен для приемного конвейера 5 с возможностью свободного вращения. Данные вращающиеся элементы 8-13 вращаются, когда приемная бесконечная лента 14 перемещается вдоль ее продольного направления. Следует отметить, что первый транспортирующий вращающийся элемент 8 соответствует первому транспортному намоточному элементу. Второй транспортирующий вращающийся элемент 9 соответствует второму транспортному намоточному элементу. Первый перенаправляющий вращающийся элемент 10 соответствует первому перенаправляющему намоточному элементу. При этом второй перенаправляющий вращающийся элемент 11 соответствует второму перенаправляющему намоточному элементу.
[0036]
Когда приемный конвейер 5 смонтирован так, что транспортирующая поверхность является горизонтальной, и ответвляющийся конвейер 1 переведен в состояние транспортирования прямо вперед, ось вращения каждого из первого транспортирующего вращающегося элемента 8, второго транспортирующего вращающегося элемента 9, первого перенаправляющего вращающегося элемента 10, второго перенаправляющего вращающегося элемента 11, приводного вращающегося элемента 12 и натяжного вращающегося элемента 13 проходит вдоль поперечного направления, так что направления осей вращения данных вращающихся элементов 8-13 параллельны друг другу.
[0037]
Кроме того, приемный конвейер 5 имеет базовую раму 17, которая обеспечивает опору для первого транспортирующего вращающегося элемента 8, приводного вращающегося элемента 12 и натяжного вращающегося элемента 13 с возможностью их вращения вокруг соответствующих горизонтальных осей вращения, первую опорную раму 18, которая обеспечивает опору для первого перенаправляющего вращающегося элемента 10 с возможностью его вращения вокруг горизонтальной оси вращения, и вторую опорную раму 19, которая обеспечивает опору для второго транспортирующего вращающегося элемента 9 и второго перенаправляющего вращающегося элемента 11 с возможностью их вращения вокруг соответствующих горизонтальных осей вращения. Базовая рама 17 жестко соединена с базовой платформой 20, прикрепленной к поверхности пола, на которой смонтирован приемный конвейер 5 (ответвляющийся конвейер 1), в то время как первая опорная рама 18 и вторая опорная рама 19 соединены с базовой платформой 20 с возможностью их поворота вокруг первой оси Х1 (которая соответствует вертикальной оси), которая проходит вдоль вертикального направления и расположена в расположенной дальше по ходу/выходной концевой части приемного конвейера 5 относительно направления транспортирования. Кроме того, электродвигатель 15 приемного транспортного конвейера опирается на базовую раму 17.
[0038]
Опорный элемент 20а предусмотрен стоящим вертикально на базовой платформе 20. При этом первая опорная рама 18 присоединена к опорному элементу 20а базовой платформы 20 с возможностью поворота вокруг первой оси Х1. Кроме того, рамный элемент 28 поворотного конвейера 6 присоединен к опорному элементу 20а с возможностью поворота вокруг первой оси Х1, в то время как вторая опорная рама 19 присоединена к опорному элементу 20а с возможностью поворота вокруг первой оси Х1 посредством рамного элемента 28 в результате того, что вторая опорная рама 19 присоединена к рамному элементу 28.
Таким образом, второй транспортирующий вращающийся элемент 9, первый перенаправляющий вращающийся элемент 10 и второй перенаправляющий вращающийся элемент 11 закреплены с возможностью поворота вокруг первой оси Х1, расположенной в выходной концевой части приемного конвейера 5 относительно направления транспортирования.
Между тем, первая ось Х1 расположена в центре приемной бесконечной ленты 14, определяемом вдоль поперечного направления, на виде в плане и расположена по ходу за вторым транспортирующим вращающимся элементом 9 относительно направления транспортирования. При этом первая ось Х1 и второй транспортирующий вращающийся элемент 9 смещены друг от друга вдоль направления транспортирования на величину радиуса, приблизительный размер которого меньше диаметра второго транспортирующего вращающегося элемента 9.
[0039]
Далее дополнительно описан поворотный конвейер 6.
Поворотный конвейер 6 предусмотрен с расположенным с входной стороны, вращающимся элементом 22, расположенным с выходной стороны, вращающимся элементом 23, приводным вращающимся элементом 24 и натяжным вращающимся элементом 25, поворотной бесконечной лентой 26, которая намотана поверх данных вращающихся элементов 22-25, и электродвигателем 27 поворотного транспортного конвейера. При этом часть поворотной бесконечной ленты 26, которая образует транспортирующую поверхность, перемещается вдоль направления транспортирования в результате того, что приводной вращающийся элемент 24 приводится во вращение посредством электродвигателя 27 поворотного транспортного конвейера. Кроме того, когда поворотный конвейер 6 смонтирован так, что транспортирующая поверхность является горизонтальной и ответвляющийся конвейер 1 переведен в состояние транспортирования прямо вперед, ось вращения каждого из расположенного с входной стороны, вращающегося элемента 22, расположенного с выходной стороны, вращающегося элемента 23, приводного вращающегося элемента 24 и натяжного вращающегося элемента 25 проходит вдоль поперечного направления, так что направления осей вращения данных вращающихся элементов 22-25 параллельны друг другу.
[0040]
Поворотный конвейер 6 включает в себя рамный элемент 28, который обеспечивает опору для расположенного с входной стороны, вращающегося элемента 22, расположенного с выходной стороны, вращающегося элемента 23, приводного вращающегося элемента 24 и натяжного вращающегося элемента 25 с возможностью их вращения вокруг соответствующих горизонтальных осей вращения. При этом данный рамный элемент 28 присоединен к базовой платформе 20 с возможностью поворота вокруг первой оси Х1, проходящей вдоль вертикального направления. Первая ось Х1 расположена по ходу перед (со стороны, с которой приемный конвейер 5 расположен относительно направления транспортирования) рамным элементом 28 поворотного конвейера 6. Поворотный конвейер 6 предусмотрен с дугообразной направляющей 29, которая соединена с базовой платформой 20 и опирается на базовую платформу 20 для направления концевой части рамного элемента 28, расположенной на выходной стороне относительно направления транспортирования (на стороне, противоположной по отношению к той стороне, с которой расположен приемный конвейер 5, вдоль направления транспортирования), при ее перемещении вокруг первой оси Х1, и с направляющим роликом 30, который соединен с рамным элементом 28 и опирается на рамный элемент 28 и направляется направляющей 29.
Между тем, поворотный конвейер 6 выполнен с такой конфигурацией, что он имеет такую длину, что в том случае, когда ответвляющийся конвейер 1 переведен в состояние транспортирования в направлении ответвления, конец поворотного конвейера 6, расположенный на выходной стороне относительно направления транспортирования, будет перемещен в поперечном направлении за пределы, соответствующие определяемой в поперечном направлении ширине поворотной бесконечной ленты 26 ответвляющегося конвейера 1 в состоянии транспортирования прямо вперед.
[0041]
Конструкция для перевода ответвляющегося конвейера 1 в состояние транспортирования прямо вперед и в состояние транспортирования в направлении ответвления описана далее.
Как показано на фиг.4 и 5, ответвляющийся конвейер 1 (приемный конвейер 5) выполнен с механизмом 33, обеспечивающим функциональное соединение, (см. фиг.3), который функционально соединяет первую опорную раму 18, вторую опорную раму 19 и рамный элемент 28.
Данный механизм 33, обеспечивающий функциональное соединение, функционально соединяет первую опорную раму 18, вторую опорную раму 19 и рамный элемент 28 друг с другом для поворота первой опорной рамы 18 вокруг первой оси Х1 в том же направлении, что и направление, в котором поворачивается вторая опорная рама 19, и на величину поворота, которая превышает (превышает в два раза в данном варианте осуществления) величину поворота второй опорной рамы 19 при повороте второй опорной рамы 19 и рамного элемента 28 вокруг первой оси Х1.
[0042]
Кроме того, вторая опорная рама 19 и рамный элемент 28 соединены с образованием одного целое, и при этом вторая опорная рама 19 соединена с рамным элементом 28 поворотного конвейера 6 для поворота как одно целое с поворотным конвейером 6 вокруг первой оси Х1. Таким образом, когда рамный элемент 28 поворачивается вокруг первой оси Х1, вторая опорная рама 19 поворачивается в том же направлении, что и направление, в котором поворачивается рамный элемент 28, и на ту же величину поворота, что и величина поворота рамного элемента 28. Механизм 33, обеспечивающий функциональное соединение, выполнен с конфигурацией, обеспечивающей функциональное соединение поворотного конвейера 6 с первой опорной рамой 18 и второй опорной рамой 19 для обеспечения поворота поворотного конвейера 6 вокруг первой оси Х1 на ту же величину поворота, что и величина поворота второй опорной рамы 19, при повороте второй опорной рамы 19 вокруг первой оси Х1.
[0043]
Механизм 33, обеспечивающий функциональное соединение, описан более подробно.
Механизм 33, обеспечивающий функциональное соединение, включает в себя соединительный элемент 38, приводимый в действие и поворачиваемый вокруг второй оси Х2, проходящей вдоль вертикального направления, посредством электродвигателя 34 для поворота, который функционирует в качестве приводного устройства для поворота, первое звено 35, проксимальная концевая часть которого соединена с соединительным элементом 38 и дистальная концевая часть которого соединена с первой опорной рамой 18, и второе звено 36, проксимальная концевая часть которого соединена с соединительным элементом 38 и дистальная концевая часть которого соединена с рамным элементом 28. Следует отметить, что первый элемент «а», обеспечивающий функциональное соединение, который функционально соединяет первый перенаправляющий вращающийся элемент 10 с электродвигателем 34 для поворота, состоит из первого звена 35 и первой опорной рамы 18 или образован первым звеном 35 и первой опорной рамой 18, в то время как третий элемент «с», обеспечивающий функциональное соединение, который функционально соединяет поворотный конвейер 6 с электродвигателем 34 для поворота, состоит из второго звена 36 или образован вторым звеном 36. Кроме того, второй элемент «b», обеспечивающий функциональное соединение, который функционально соединяет второй транспортирующий вращающийся элемент 9 и второй перенаправляющий вращающийся элемент 11 с электродвигателем 34 для поворота, состоит из второго звена 36, рамного элемента 28 (поворотного конвейера 6) и второй опорной рамы 19 или образован вторым звеном 36, рамным элементом 28 (поворотным конвейером 6) и второй опорной рамой 19.
[0044]
В данном случае место соединения между дистальной концевой частью первого звена 35 и первой опорной рамой 18 будет названо первым местом Р1 соединения, в то время как место соединения между дистальной концевой частью второго звена 36 и рамным элементом 28 будет названо вторым местом Р2 соединения. В данном варианте осуществления расстояние вдоль прямой линии от второго места Р2 соединения до первой оси Х1 на виде в плане задано приблизительно в два раза превышающим расстояние, определяемое вдоль прямой линии, от первого места Р1 соединения до первой оси Х1 на виде в плане. Первое звено 35 соединено с первой опорной рамой 18, и второе звено 36 соединено с рамным элементом 28 при таком соотношении между расстояниями.
Между тем, как показано на фиг.4 и 5, когда первое место Р1 соединения и второе место Р2 соединения перемещаются на одно и то же расстояние по прямой линии (на длину хорды) для поворота первой опорной рамы 18 на 60 градусов и поворота второй опорной рамы 19 и рамного элемента 28 на 30 градусов, соотношение между расстоянием (первым радиусом r1 поворота), определяемым вдоль прямой линии от первой оси Х1 до первого места Р1 соединения на виде в плане, и расстоянием (вторым радиусом r2 поворота) от первой оси Х1 до второго места Р2 соединения на виде в плане задано выражением
2⋅r⋅sin(60/2)=2⋅r2⋅sin(30/2).
Следует отметить, что единица измерения углов (единица измерения для величин «60» и «30» в вышеприведенной формуле) представляет собой градусы.
При наличии такого соотношения между первым радиусом r1 поворота и вторым радиусом r2 поворота может быть обеспечена величина поворота первой опорной рамы 18, в два раза превышающая величину поворота второй опорной рамы 19 и рамного элемента 28 при перемещении первого места Р1 соединения и второго места Р2 соединения на одно и то же расстояние по прямой линии; таким образом, величина изменения длины траектории намотки в каждом месте вдоль направления ширины ленты может быть уменьшена при изменении ориентации ответвляющегося конвейера 1.
[0045]
Кроме того, проксимальные концевые части первого звена 35 и второго звена 36 соединены с местами на соединительном элементе 38, которые смещены от второй оси Х2. При месте соединения между проксимальной концевой частью первого звена 35 и соединительным элементом 38, определяемом как третье место Р3 соединения, и месте соединения между проксимальной концевой частью второго звена 36 и соединительным элементом 38, определяемом как четвертое место Р4 соединения, расстояние, определяемое вдоль прямой линии от третьего места Р3 соединения до второй оси Х2 на виде в плане, и расстояние, определяемое вдоль прямой линии от четвертого места Р4 соединения до второй оси Х2 на виде в плане, являются одинаковыми. Первое звено 35 и второе звено 36 соединены с соединительным элементом 38 при таком соотношении между расстояниями.
Кроме того, как показано на фиг.4 и 5, первое звено 35 образовано более длинным, чем второе звено 36.
[0046]
Первая ось Х1 и второе место Р2 соединения расположены в в той части соответственно приемной бесконечной ленты 14 и поворотной бесконечной ленты 26, которая является центральной вдоль поперечного направления. При этом, несмотря на то, что первое место Р1 соединения расположено в пределах определяемых в поперечном направлении ширины приемной бесконечной ленты 14 и ширины поворотной бесконечной ленты 26, оно расположено в месте, которое смещено по направлению к одной стороне (к стороне, противоположной по отношению к той стороне, с которой расположен расположенный дальше по ходу конвейер 3b, предназначенный для транспортирования в направлении ответвления) от соответствующих тех частей данных бесконечных лент 14, 26, которые являются центральными вдоль поперечного направления.
Кроме того, электродвигатель 34 для поворота и соединительный элемент 38 расположены с другой стороны (со стороны, с которой расположен расположенный дальше по ходу конвейер 3b, предназначенный для транспортирования в направлении ответвления) вдоль поперечного направления приемной бесконечной ленты 14 и поворотной бесконечной ленты 26.
Кроме того, первое место Р1 соединения расположено по ходу за первой осью Х1 относительно направления транспортирования. При этом второе место Р2 соединения расположено дальше по ходу по отношению к первому месту Р1 соединения. При этом электродвигатель 34 для поворота и соединительный элемент 38 расположены так, что, по меньшей мере, часть их расположена между первым местом Р1 соединения и вторым местом Р2 соединения вдоль направления транспортирования.
Кроме того, как показано на фиг.3, первое звено 35 и второе звено 36 расположены между базовой платформой 20 и рамным элементом 28 в вертикальном направлении и находятся в более низких местах, чем рамный элемент 28 (поворотный конвейер 6). При этом первое звено 35, второе звено 36 и рамный элемент 28 расположены в пределах определяемой в вертикальном направлении ширины приемного конвейера 5 (в пределах определяемой вдоль вертикального направления ширины траектории намотки приемной бесконечной ленты 14).
[0047]
Между тем, как показано на фиг.4 и 5, первое место Р1 соединения в том случае, когда ответвляющийся конвейер 1 переведен в состояние транспортирования прямо вперед, первое место Р1 соединения в том случае, когда ответвляющийся конвейер 1 переведен в состояние транспортирования в направлении ответвления, третье место Р3 соединения в том случае, когда ответвляющийся конвейер 1 переведен в состояние транспортирования прямо вперед, третье место Р3 соединения в том случае, когда ответвляющийся конвейер 1 переведен в состояние транспортирования в направлении ответвления, и вторая ось Х2 расположены так, что они будут выровнены по прямой линии на виде в плане. Кроме того, в промежуточном состоянии между состоянием транспортирования прямо вперед и состоянием транспортирования в направлении ответвления (в состоянии, в котором первая опорная рама 18 повернута против часовой стрелки на 30 градусов из состояния транспортирования прямо вперед) отрезок прямой, который соединяет первую ось Х1 и первое место Р1 соединения, и отрезок прямой, который соединяет первое место Р1 соединения и третье место Р3 соединения, пересекаются друг с другом перпендикулярно на виде в плане.
Аналогичным образом, второе место Р2 соединения в том случае, когда ответвляющийся конвейер 1 переведен в состояние транспортирования прямо вперед, второе место Р2 соединения в том случае, когда ответвляющийся конвейер 1 переведен в состояние транспортирования в направлении ответвления, четвертое место Р4 соединения в том случае, когда ответвляющийся конвейер 1 переведен в состояние транспортирования прямо вперед, четвертое место Р4 соединения в том случае, когда ответвляющийся конвейер 1 переведен в состояние транспортирования в направлении ответвления, и вторая ось Х2 расположены так, что они будут выровнены по прямой линии на виде в плане. Кроме того, в промежуточном состоянии между состоянием транспортирования прямо вперед и состоянием транспортирования в направлении ответвления (в состоянии, в котором рамный элемент 28 повернут против часовой стрелки на 15 градусов из состояния транспортирования прямо вперед) отрезок прямой, который соединяет первую ось Х1 и второе место Р2 соединения, и отрезок прямой, который соединяет второе место Р2 соединения и четвертое место Р4 соединения, пересекаются друг с другом перпендикулярно на виде в плане.
[0048]
Как описано выше, проксимальные концевые части первого звена 35 и второго звена 36 соединены с местами на соединительном элементе 38, которые смещены от второй оси Х2. Таким образом, при приведении соединительного элемента 38 во вращение посредством электродвигателя 34 для поворота проксимальные концевые части первого звена 35 и второго звена 36 перемещаются вокруг второй оси Х2.
При этом механизм 33, обеспечивающий функциональное соединение, выполнен с конфигурацией, обеспечивающей поворот первой опорной рамы 18 вокруг первой оси Х1 в направлении, в котором поворачиваются вторая опорная рама 19 и рамный элемент 28, и на величину поворота, которая в два раза превышает величину поворота второй опорной рамы 19 и рамного элемента 28, за счет обеспечения перемещения первого места Р1 соединения и второго места Р2 соединения вокруг первой оси Х1 в одном и том же направлении и на одно и то же расстояние по прямой линии, когда соединительный элемент 38 поворачивается вокруг второй оси Х2 под действием приводного усилия, создаваемого электродвигателем 34 для поворота, для перемещения первого звена 35 и второго звена 36, в результате взаимосвязи между положением первой оси Х1, положением второй оси Х2, положениями мест соединения первого звена 35 с соединительным элементом 38 и первой опорной рамой 18, положениями мест соединения второго звена 36 с соединительным элементом 38 и рамным элементом 28 и т.д.
Более конкретно, механизм 33, обеспечивающий функциональное соединение, выполнен с конфигурацией, обеспечивающей перемещение первого места Р1 соединения и второго места Р2 соединения в направлении против часовой стрелки вокруг первой оси Х1 так, чтобы иметь одну и ту же длину хорды, из состояния, показанного на фиг.4, в состояние, показанное на фиг.5, в результате поворота соединительного элемента 38 на 180 градусов для обеспечения поворота рамного элемента 28 (поворотного конвейера 6) и второй опорной рамы 19, соединенной с ним, (второго транспортирующего вращающегося элемента 9 и второго перенаправляющего вращающегося элемента 11) в направлении против часовой стрелки на 30 градусов и для обеспечения поворота первой опорной рамы 18 (первого перенаправляющего вращающегося элемента 10) в направлении против часовой стрелки на 60 градусов.
[0049]
Как показано на фиг.1-6, приемный конвейер 5 выполнен с механизмами 41 предотвращения меандрирования, предназначенными для предотвращения меандрирования приемной бесконечной ленты 14.
Механизм 14 предотвращения меандрирования предусмотрен для каждой из тех обеих частей приемной бесконечной ленты 14, которые являются концевыми вдоль поперечного направления. При этом множество комплектов, состоящих из пары механизмов 41 предотвращения меандрирования, предусмотренных таким образом, предусмотрены вдоль продольного направления приемной бесконечной ленты 14. В отношении механизма 41 предотвращения меандрирования, предусмотренного в выходной концевой части транспортирующей части 14а по отношению к направлению транспортирования, следует отметить, что предусмотрен только механизм 41 предотвращения меандрирования, расположенный с одной стороны (со стороны, противоположной по отношению к той стороне, с которой расположен расположенный дальше по ходу конвейер 3b, предназначенный для транспортирования в направлении ответвления) вдоль поперечного направления (из пары механизмов 41 предотвращения меандрирования), чтобы не вызывать столкновения друг с другом первой опорной рамы 18 и механизма 41 предотвращения меандрирования, когда приемный конвейер 5 переводится в состояние транспортирования в направлении ответвления.
[0050]
Как показано на фиг.6, каждый из механизмов 41 предотвращения меандрирования включает в себя ролик 42, расположенный со стороны поверхности наружной стороны и предназначенный для контакта с поверхностью наружной стороны (поверхностью на той стороне, с которой образована транспортирующая поверхность) приемной бесконечной ленты 14, и ролик 43, расположенный со стороны поверхности обратной стороны и предназначенный для контакта с поверхностью обратной стороны приемной бесконечной ленты 14. При этом данные ролик 42, расположенный со стороны поверхности наружной стороны, и ролик 43, расположенный со стороны поверхности обратной стороны, расположены с возможностью удерживания приемной бесконечной ленты 14 между ними.
[0051]
На расположенной с обратной стороны поверхности приемной бесконечной ленты 14 и в тех обеих частях приемной бесконечной ленты 14, которые являются концевыми в поперечном направлении, образован выступ 14b, имеющий форму горы и проходящий вдоль продольного направления приемной бесконечной ленты 14. При этом ролик 43, расположенный со стороны поверхности обратной стороны, расположен в пространственном положении, в котором его ось вращения наклонена так, чтобы соответствовать внутренней в поперечном направлении, наклонной поверхности выступа 14b. Ролик 42, расположенный со стороны поверхности наружной стороны, расположен в пространственном положении, в котором его ось вращения является горизонтальной. Ролик 42, расположенный со стороны поверхности наружной стороны, и ролик 43, расположенный со стороны поверхности обратной стороны, предусмотрены так, что расстояние между ними меньше толщины той части приемной бесконечной ленты 14, которая имеет выступ 14b, образованный на ней. Перемещение приемной бесконечной ленты 14 в поперечном направлении внутрь предотвращается в результате того, что ролик 43, расположенный со стороны поверхности обратной стороны, контактирует с выступом 14b со стороны, внутренней в поперечном направлении, в результате чего ограничивается меандрирование приемной бесконечной ленты 14.
[0052]
Как показано на фиг.1 - фиг.6, механизмы 41 предотвращения меандрирования, которые ограничивают меандрирование транспортирующей части 14а, опираются на базовую раму 17. Другими словами, даже когда первая опорная рама 18 и вторая опорная рама 19 поворачиваются вокруг первой оси Х1 для перевода ответвляющегося конвейера 1 из состояния транспортирования прямо вперед в состояние транспортирования в направлении ответвления, механизмы 41 предотвращения меандрирования, которые ограничивают меандрирование транспортирующей части 14а, не поворачиваются вокруг первой оси Х1. Таким образом, даже если ответвляющийся конвейер 1 переведен из состояния транспортирования прямо вперед в состояние транспортирования в направлении ответвления, транспортирующая часть 14а удерживается в ориентации вдоль направления транспортирования прямо вперед; таким образом, направление транспортирования, обеспечиваемое ответвляющимся конвейером 1, является одинаковым в состоянии транспортирования прямо вперед и в состоянии транспортирования в направлении ответвления.
[0053]
Ответвляющийся конвейер 1 выполнен так, что второй транспортирующий вращающийся элемент 9, первый перенаправляющий вращающийся элемент 10 и второй перенаправляющий вращающийся элемент 11 закреплены с возможностью поворота вокруг первой оси Х1, которая проходит в вертикальном направлении и расположена в выходной концевой части приемного конвейера 5 относительно направления транспортирования. Кроме того, второй транспортирующий вращающийся элемент 9 расположен в выходной концевой части транспортирующей части 14а приемной бесконечной ленты 14 относительно направления транспортирования.
Поворот второго транспортирующего вращающегося элемента 9, первого перенаправляющего вращающегося элемента 10 и второго перенаправляющего вращающегося элемента 11 обеспечивается в состоянии, в котором они функционально соединены, посредством механизма 33, обеспечивающего функциональное соединение, для обеспечения поворота второго транспортирующего вращающегося элемента 9 и второго перенаправляющего вращающегося элемента 11 как одного целого вокруг первой оси Х1 и для обеспечения поворота первого перенаправляющего вращающегося элемента 10 вокруг первой оси Х1 в направлении, в котором поворачиваются второй транспортирующий вращающийся элемент 9 и второй перенаправляющий вращающийся элемент 11, и на величину поворота, которая в два раза превышает величину поворота второго транспортирующего вращающегося элемента 9 и второго перенаправляющего вращающегося элемента 11.
Поскольку при этом первая ось Х1 расположена в выходной концевой части вдоль направления транспортирования, в которой предусмотрен второй транспортирующий вращающийся элемент 9, радиус поворота второго транспортирующего вращающегося элемента 9 является малым, так что второй транспортирующий вращающийся элемент 9 поворачивается в малом пространстве.
[0054]
[Альтернативные варианты осуществления]
(1) В варианте осуществления, описанном выше, один ответвляющийся конвейер 1 предусмотрен между конвейером 2, расположенным впереди по ходу, и конвейером 3, расположенным дальше по ходу; тем не менее, множество ответвляющихся конвейеров 1 могут быть предусмотрены между расположенными впереди по ходу конвейерами 2 и расположенными дальше по ходу конвейерами 3 в зависимости от числа конвейеров 2, расположенных впереди по ходу, и конвейеров 3, расположенных дальше по ходу.
Более конкретно, например, как показано на фиг.7 и 8, когда предусмотрен один конвейер 2, расположенный впереди по ходу, и два конвейера 3, расположенных дальше по ходу, первый ответвляющийся конвейер 1 может быть предусмотрен рядом с и за конвейером 2, расположенным дальше по ходу, относительно направления перемещения, и второй ответвляющийся конвейер 1 может быть предусмотрен рядом с и перед конвейером 3а, расположенным дальше по ходу и предназначенным для транспортирования прямо вперед, относительно направления перемещения, и третий ответвляющийся конвейер 1 может быть предусмотрен рядом с и за конвейером 3b, расположенным дальше по ходу и предназначенным для транспортирования в направлении ответвления, относительно направления перемещения.
Между тем, первый - третий ответвляющиеся конвейеры 1 имеют конструкцию, аналогичную ответвляющемуся конвейеру 1 в варианте осуществления, описанном выше, за исключением того, что определяемая в продольном направлении длина поворотных конвейеров 6 является более короткой.
[0055]
Когда три ответвляющихся конвейера 1 предусмотрены, как описано выше, первый ответвляющийся конвейер 1 будет расположен так, что данная одна сторона (сторона, соответствующая первому направлению) вдоль направления транспортирования расположена с входной стороны, в то время как другая сторона (сторона, соответствующая второму направлению) вдоль направления транспортирования расположена с выходной стороны, и второй ответвляющийся конвейер 1 и третий ответвляющийся конвейер 1 будут расположены так, что данная одна сторона (сторона, соответствующая первому направлению) вдоль направления транспортирования расположена с выходной стороны, в то время как другая сторона (сторона, соответствующая второму направлению) вдоль направления транспортирования расположена с входной стороны. При этом при переводе первого ответвляющегося конвейера 1 и второго ответвляющегося конвейера 1 в состояние транспортирования прямо вперед и переводе третьего ответвляющегося конвейера 1 в состояние транспортирования в направлении ответвления изделия, транспортируемые с конвейера 2, расположенного впереди по ходу, могут быть перемещены к конвейеру 3а, расположенному дальше по ходу и предназначенному для транспортирования прямо вперед. При этом при переводе первого ответвляющегося конвейера 1 и второго ответвляющегося конвейера 1 в состояние транспортирования в направлении ответвления и переводе третьего ответвляющегося конвейера 1 в состояние транспортирования прямо вперед изделия, транспортируемые с конвейера 2, расположенного впереди по ходу, могут быть перемещены к конвейеру 3b, расположенному дальше по ходу и предназначенному для транспортирования в направлении ответвления.
Таким образом, при конфигурировании таким образом транспортного оборудования определяемая вдоль направления транспортирования длина поворотных конвейеров 6 может быть выполнена короткой.
[0056]
(2) В варианте осуществления, описанном выше, множество звеньев 35 и 36 предусмотрены для образования механизма 33, обеспечивающего функциональное соединение, однако конструкция механизма 33, обеспечивающего функциональное соединение, может быть изменена соответствующим образом.
Другими словами, механизм 33, обеспечивающий функциональное соединение, может быть выполнен следующим образом.
Как показано на фиг.9-11, на рамном элементе 28 предусмотрен веерообразный зубчатый элемент 45, который вращается как одно целое с данным рамным элементом 28 вокруг первой оси Х1. При этом зубчатая часть 46 образована на первой опорной раме 18. При этом зубчатое колесо 47 малого диаметра, которое входит в зацепление с веерообразным зубчатым элементом 45 и зубчатым колесом 48 большого диаметра, которое имеет больший диаметр, чем зубчатое колесо 47 малого диаметра, и входит в зацепление с зубчатой частью 46, предусмотрены так, что они вращаются как одно целое.
При образовании механизма 33, обеспечивающего функциональное соединение, с таким веерообразным зубчатым элементом 45, зубчатой частью 46, зубчатым колесом 47 малого диаметра и зубчатым колесом 48 большого диаметра и при наличии рабочего, вручную поворачивающего поворотный конвейер 6 вокруг первой оси Х1, зубчатое колесо 47 малого диаметра и зубчатое колесо 48 большого диаметра приводятся во вращение, и первая опорная рама 18 поворачивается в том же направлении, что и направление, в котором поворачивается поворотный конвейер 6, и поворачивается на величину, в два раза превышающую величину поворота поворотного конвейера 6. При этом вторая опорная рама 19 поворачивается в том же направлении, что и направление, в котором поворачивается поворотный конвейер 6, и на такую же величину поворота, как величина поворота поворотного конвейера 6.
[0057]
Даже когда предусмотрено множество звеньев 35 и 36 для образования механизма 33, обеспечивающего функциональное соединение, конструкция механизма 33, обеспечивающего функциональное соединение, может быть изменена соответствующим образом.
Более конкретно, как показано на фиг.14, выходное зубчатое колесо 51, которое приводится в движение и вращается вокруг второй оси Х2 посредством электродвигателя 34 для поворота (непоказанного), введено в зацепление с вращающимся в противоположном направлении, зубчатым колесом 52 для перенаправления. Первое зубчатое колесо 53 для вращения механизма поворота введено в зацепление с вращающимся в противоположном направлении, зубчатым колесом 52 для перенаправления. При этом второе зубчатое колесо 54 для вращения механизма поворота введено в зацепление с выходным зубчатым колесом 51. При этом механизм 33, обеспечивающий функциональное соединение, может быть образован посредством соединения проксимальной концевой части первого звена 35 с первым зубчатым колесом 53 для вращения механизма поворота и посредством соединения проксимальной концевой части второго звена 36 со вторым зубчатым колесом 54 для вращения механизма поворота.
Как показано на фиг.14(а), при приведении во вращение выходного зубчатого колеса 51 и вращающегося зубчатого колеса 52 для перенаправления посредством электродвигателя 34 для поворота на заданную величину, начиная от состояния, в котором ответвляющийся конвейер 1 переведен в состояние транспортирования прямо вперед, первое зубчатое колесо 53 для вращения механизма поворота приводится во вращение в направлении против часовой стрелки и второе зубчатое колесо 54 для вращения механизма поворота приводится во вращение по часовой стрелке. Таким образом, механизм 33, обеспечивающий функциональное соединение, выполнен с такой конфигурацией, что первое звено 35 и второе звено 36 перемещаются при одновременном перемещении первого места Р1 соединения и второго места Р2 соединения в направлении против часовой стрелки вокруг первой оси Х1 так, что имеется одинаковая длина хорды, что обеспечивает поворот рамного элемента 28 (поворотного конвейера 6) и второй опорной рамы 19 (второго транспортирующего вращающегося элемента 9 и второго перенаправляющего вращающегося элемента 11), соединенной с ним, в направлении против часовой стрелки на 30 градусов и обеспечивает поворот первой опорной рамы 18 (первого перенаправляющего вращающегося элемента 10) в направлении против часовой стрелки на 60 градусов для перевода ответвляющегося конвейера 1 в состояние транспортирования в направлении ответвления, как показано на фиг.14(b).
[0058]
(3) В варианте осуществления, описанном выше, электродвигатель 34 для поворота предусмотрен для функционирования в качестве приводного устройства для поворота; тем не менее, другое приводное устройство, такое как цилиндр, может быть предусмотрено для функционирования в качестве приводного устройства для поворота.
Кроме того, в варианте осуществления, описанном выше, предусмотрено приводное устройство для поворота и первая опорная рама 18 и вторая опорная рама 19 поворачиваются посредством приводного усилия, создаваемого приводным устройством для поворота; тем не менее, данные первая опорная рама 18 и вторая опорная рама 19 могут быть повернуты посредством ручной операции, выполняемой рабочим.
Посредством приведения конкретных примеров можно указать, что в альтернативном варианте (2) осуществления, описанном выше, первая опорная рама 18 и вторая опорная рама 19, которые функционально соединены посредством механизма 33, обеспечивающего функциональное соединение, могут быть повернуты за счет поворота поворотного конвейера 6 вокруг первой оси Х1 посредством приводного устройства для поворота, такого как цилиндр. Кроме того, первая опорная рама 18 и вторая опорная рама 19, которые функционально соединены посредством механизма 33, обеспечивающего функциональное соединение, могут быть повернуты за счет поворота поворотного конвейера 6 вокруг первой оси Х1 посредством ручной операции, выполняемой рабочим.
[0059]
(4) В варианте осуществления, описанном выше, конвейер 3а, расположенный дальше по ходу и предназначенный для транспортирования прямо вперед, и конвейер 3b, расположенный дальше по ходу и предназначенный для транспортирования в направлении ответвления, предусмотрены в качестве конвейеров 3, расположенных дальше по ходу. При этом конструкции выполнены такими, что изделия избирательно транспортируются к конвейеру 3а, расположенному дальше по ходу и предназначенному для транспортирования прямо вперед, или к конвейеру 3b, расположенному дальше по ходу и предназначенному для транспортирования в направлении ответвления, за счет перевода ответвляющегося конвейера 1 в состояние транспортирования прямо вперед или в состояние транспортирования в направлении ответвления. Однако только один из конвейера 3а, расположенного дальше по ходу и предназначенного для транспортирования прямо вперед, и конвейера 3b, расположенного дальше по ходу и предназначенного для транспортирования в направлении ответвления, может быть предусмотрены в качестве конвейера 3, расположенного дальше по ходу, и при этом ответвляющийся конвейер 1 может быть предусмотрен в ориентации, которая соответствует ориентации конвейера 3, расположенного дальше по ходу, так что состояние ответвляющегося конвейера 1 не будет «переключаться» во время транспортирования изделий.
Более конкретно, например, только конвейер 3b, расположенный дальше по ходу и предназначенный для транспортирования в направлении ответвления, может быть предусмотрен в качестве конвейера 3, расположенного дальше по ходу. При этом ответвляющийся конвейер 1 может быть смонтирован в состоянии, в котором он переведен в состояние транспортирования в направлении ответвления. Или же только конвейер 3а, расположенный дальше по ходу и предназначенный для транспортирования прямо вперед, может быть предусмотрен в качестве конвейера 3, расположенного дальше по ходу. При этом ответвляющийся конвейер 1 может быть смонтирован в состоянии, в котором он переведен в состояние транспортирования прямо вперед.
[0060]
Кроме того, когда ответвляющийся конвейер 1 смонтирован, как описано выше, в состоянии, в котором он переведен в состояние транспортирования прямо вперед или в состояние транспортирования в направлении ответвления, ответвляющийся конвейер 6 может быть образован двумя приемными конвейерами 5 и одним поворотным конвейером 6 так, что приемные конвейеры 5 будут предусмотрены с любой из двух сторон или с входной стороны и с выходной стороны поворотного конвейера 6 относительно направления транспортирования, как показано на фиг.12.
[0061]
Кроме того, ответвляющийся конвейер 1 может быть образован только одним приемным конвейером 5, при этом в данном случае конвейер 3, расположенный дальше по ходу, должен быть смонтирован в месте, которое смещено в направлении, противоположном направлению транспортирования, на величину, соответствующую несмонтированному поворотному конвейеру 6. Между тем, когда ответвляющийся конвейер 1 образован только одним приемным конвейером 5 таким образом, может быть обеспечен поворот второй опорной рамы 19, функционально соединенной посредством механизма 33, обеспечивающего функциональное соединение, за счет выполнения веерообразного зубчатого элемента 45 на первой опорной раме 18 с возможностью его поворота как одного целого с ней вокруг первой оси Х1 и за счет обеспечения поворота первой опорной рамы 18 вокруг первой оси Х1, как показано на фиг.13. Кроме того, второе звено 36 может быть соединено непосредственно со второй опорной рамой 19, так что механизму 33, обеспечивающему функциональное соединение, не требуется иметь третий элемент «с», обеспечивающий функциональное соединение.
[0062]
(5) В варианте осуществления, описанном выше, предусмотрены один конвейер 3а, расположенный дальше по ходу и предназначенный для транспортирования прямо вперед, и один конвейер 3b, расположенный дальше по ходу и предназначенный для транспортирования в направлении ответвления. Однако могут быть предусмотрены один конвейер 3а, расположенный дальше по ходу и предназначенный для транспортирования прямо вперед, и два конвейера 3b, расположенных дальше по ходу и предназначенных для транспортирования в направлениях ответвления. Кроме того, могут быть предусмотрены два конвейера 3b, расположенных дальше по ходу и предназначенных для транспортирования в направлениях ответвления, без выполнения какого-либо конвейера 3а, расположенного дальше по ходу и предназначенного для транспортирования прямо вперед.
[0063]
(6) В варианте осуществления, описанном выше, вторая опорная рама 19 поворачивается на 30 градусов при переводе ответвляющегося конвейера 1 из состояния транспортирования прямо вперед в состояние транспортирования в направлении ответвления. Однако угол поворота второй опорной рамы 19 при переводе ответвляющегося конвейера 1 из состояния транспортирования прямо вперед в состояние транспортирования в направлении ответвления может быть изменен соответствующим образом. В качестве конкретных примеров угол поворота второй опорной рамы 19 при переводе ответвляющегося конвейера 1 из состояния транспортирования прямо вперед в состояние транспортирования в направлении ответвления может быть задан и изменен в пределах диапазона от 15 градусов до 40 градусов. Между тем, конструкции могут быть выполнены таким образом, что может быть выбрано множество углов поворота в пределах заданного диапазона углов (например, 40 градусов). Например, вторая опорная рама 19 может быть повернута дальше из состояния транспортирования в направлении ответвления (называемого первым состоянием транспортирования в направлении ответвления) в состояние транспортирования в направлении ответвления (называемое вторым состоянием транспортирования в направлении ответвления). Например, вторая опорная рама 19 может быть повернута из состояния транспортирования прямо вперед на 15 градусов для размещения ее в первом состоянии транспортирования в направлении ответвления, и вторая опорная рама 19 может быть повернута из данного первого состояния транспортирования в направлении ответвления на 20 градусов для размещения ее во втором состоянии транспортирования в направлении ответвления.
Кроме того, в варианте осуществления, описанном выше, ответвляющийся конвейер 1 переводится из состояния, в котором он переведен в состояние транспортирования прямо вперед, в состояние транспортирования в направлении ответвления за счет обеспечения поворота второй опорной рамы 19 в одном направлении (поворота против часовой стрелки). Однако помимо или вместо данного состояния транспортирования в направлении ответвления ответвляющийся конвейер 1 может быть переведен из состояния, в котором он переведен в состояние транспортирования прямо вперед, в состояние транспортирования в направлении ответвления за счет обеспечения поворота второй опорной рамы 19 в другом направлении (поворота по часовой стрелке).
[0064]
(7) В варианте осуществления, описанном выше, предусмотрены одиннадцать механизмов 41 предотвращения меандрирования, однако число установленных механизмов 41 предотвращения меандрирования может быть изменено соответствующим образом. Например, из пяти механизмов 41 предотвращения меандрирования, предусмотренных для транспортирующей части 14а, только два могут быть предусмотрены с выходной стороны в направлении транспортирования (механизм 41 предотвращения меандрирования, предусмотренный рядом со вторым транспортирующим вращающимся элементом 9, и механизм 41 предотвращения меандрирования, предусмотренный рядом с электродвигателем 15 приемного транспортного конвейера).
Кроме того, когда приемная бесконечная лента 14 является такой, что ожидают меандрирования приемной бесконечное ленты 14 только к одной стороне вдоль поперечного направления, один или более механизмов 41 предотвращения меандрирования могут быть предусмотрены только для того конца приемной бесконечной ленты 14, определяемого вдоль поперечного направления, который находится со стороны, противоположной по отношению к направлению, в котором ожидается возникновение меандрирования. Между тем, можно обеспечить то, что меандрирование приемной бесконечной ленты 14 будет происходить только в одну сторону, например, за счет выполнения приемного конвейера 5 с нижеуказанной конструкцией. То есть, возможно задание направления меандрирования за счет «наклона» - вокруг вертикальной оси или поперечной (или проходящей вправо и влево) оси - ориентации одного или более (например, первого перенаправляющего вращающегося элемента 10) из намоточных элементов, предусмотренных для приемного конвейера 5, относительно остальных намоточных элементов при ответвляющемся конвейере 1, переведенном в состояние транспортирования прямо вперед.
[0065]
(8) В варианте осуществления, описанном выше, выступ 14b образован только на поверхности обратной стороны приемной бесконечной ленты 14, однако выступ 14b может быть образован только на поверхности наружной стороны приемной бесконечной ленты 14. Кроме того, выступы 14b могут быть образованы на обеих сторонах, то есть на поверхности наружной стороны и поверхности обратной стороны приемной бесконечной ленты 14. Между тем, когда выступ 14b образован на поверхности наружной стороны приемной бесконечной ленты 14, предусмотрено, что ролик 42, расположенный со стороны поверхности наружной стороны, будет расположен на высоте, на которой его ось вращения наклонена для согласования с внутренней в поперечном направлении, наклонной поверхностью выступа 14b.
[0066]
В варианте осуществления, описанном выше, одна сторона (сторона, соответствующая первому направлению) вдоль направления транспортирования определена как входная/расположенная впереди по ходу сторона относительно направления транспортирования, в то время как другая сторона (сторона, соответствующая второму направлению) вдоль направления транспортирования определена как выходная/расположенная дальше по ходу сторона относительно направления транспортирования. Однако одна сторона (сторона, соответствующая первому направлению) вдоль направления транспортирования может быть определена как выходная/расположенная дальше по ходу сторона относительно направления транспортирования, в то время как другая сторона (сторона, соответствующая второму направлению) вдоль направления транспортирования может быть определена как входная/расположенная впереди по ходу сторона относительно направления транспортирования. Когда приемный конвейер 5 (ответвляющийся конвейер 1) смонтирован в таком состоянии, расположенный впереди по ходу конвейер, предназначенный для транспортирования прямо вперед, и расположенный впереди по ходу конвейер, предназначенный для объединенного перемещения, который обеспечивает направление транспортирования, наклонное относительно конвейера, расположенного впереди по ходу и предназначенного для транспортирования прямо вперед, на виде в плане, могут быть предусмотрены в качестве конвейеров 2, расположенных впереди по ходу.
[0067]
(10) В варианте осуществления, описанном выше, первый транспортный намоточный элемент, второй транспортный намоточный элемент, первый перенаправляющий намоточный элемент и второй перенаправляющий намоточный элемент предусмотрены с возможностью свободного вращения, так что данные намоточные элементы приводятся во вращение при перемещении бесконечной ленты. Однако некоторые или все из данных намоточных элементов могут быть предусмотрены таким образом, что их невозможно будет привести во вращение, так что бесконечная лента будет скользить вдоль намоточных элементов при перемещении бесконечной ленты.
[0068]
(11) В варианте осуществления, описанном выше, приводной вращающийся элемент 12 и приводное устройство для транспортирования опираются на базовую раму 17. Однако, например, первый перенаправляющий вращающийся элемент 10 может быть выполнен в качестве приводного вращающегося элемента так, что первый перенаправляющий вращающийся элемент 10 будет приводиться во вращение посредством приводного устройства для транспортирования, и так, что приводной вращающийся элемент и приводное устройство для транспортирования будут опираться на первую опорную раму 18.
Описание ссылочных позиций и символов
[0069]
1 Транспортное устройство
2 Транспортный конвейер
6 Соседний конвейер
8 Первый транспортный намоточный элемент
9 Второй транспортный намоточный элемент
10 Первый перенаправляющий намоточный элемент
11 Второй перенаправляющий намоточный элемент
12 Приводной вращающийся элемент
14 Бесконечная лента
15 Приводное устройство для транспортирования
17 Базовая рама
18 Первая опорная рама
19 Вторая опорная рама
33 Механизм, обеспечивающий функциональное соединение
a Первый элемент, обеспечивающий функциональное соединение
b Второй элемент, обеспечивающий функциональное соединение
с Третий элемент, обеспечивающий функциональное соединение
Х Вертикальная ось
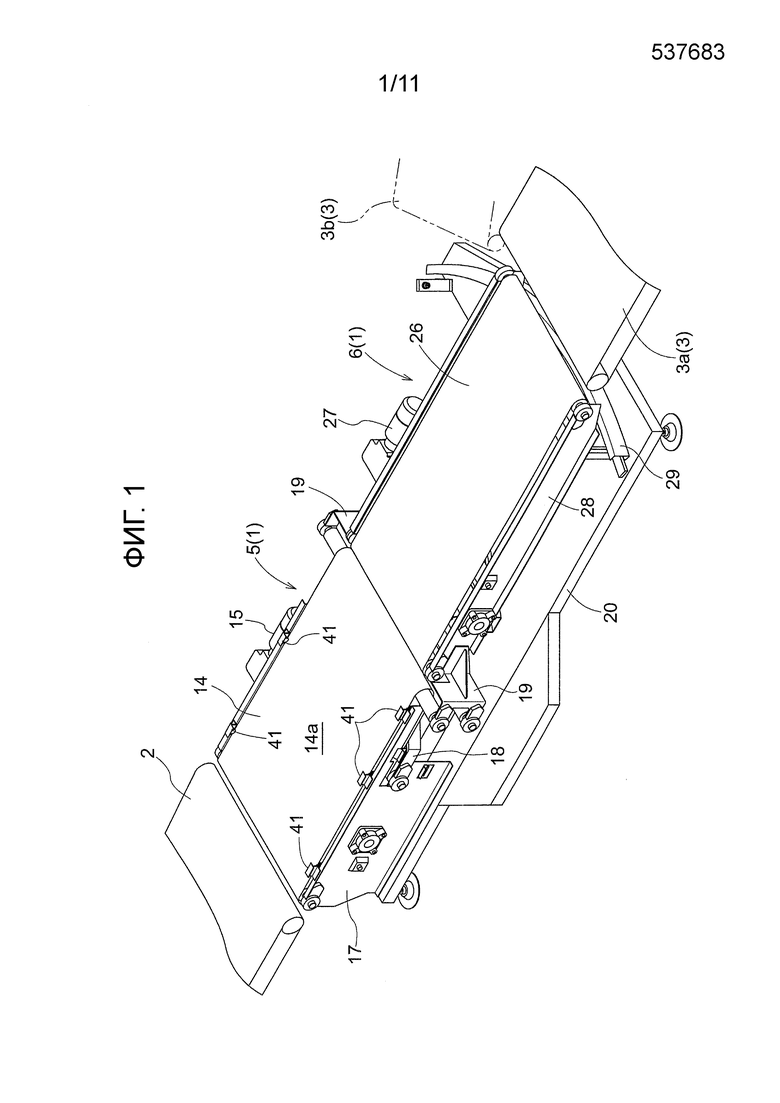
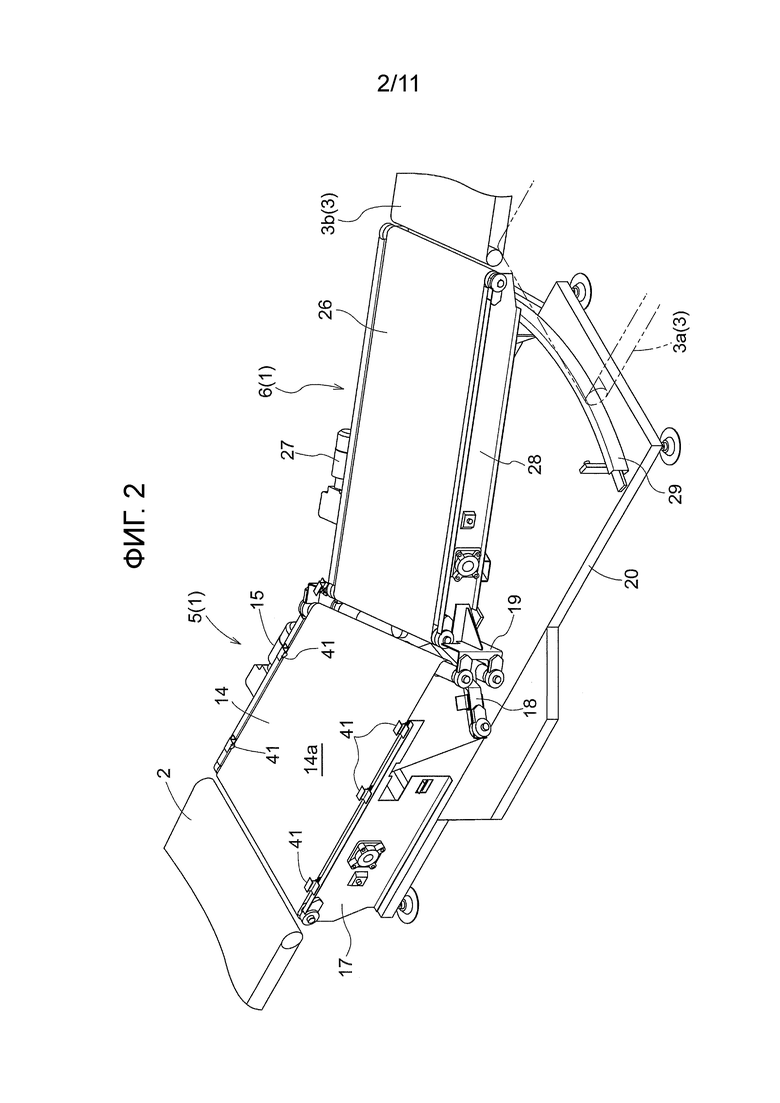
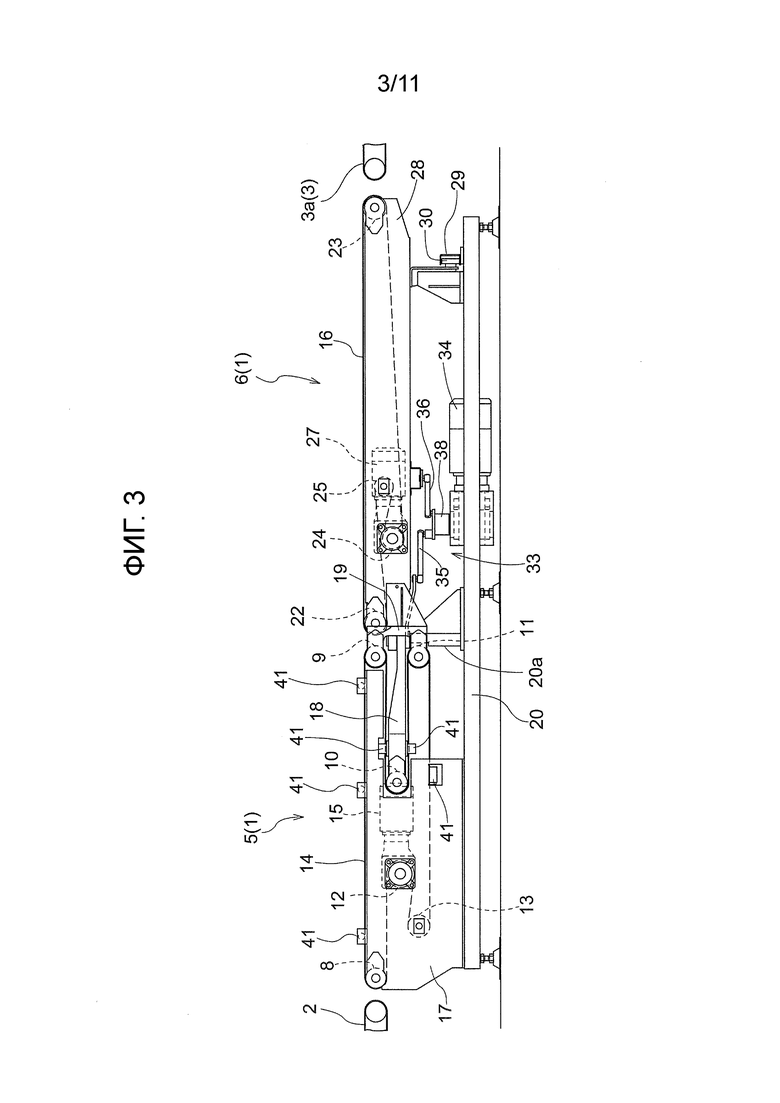
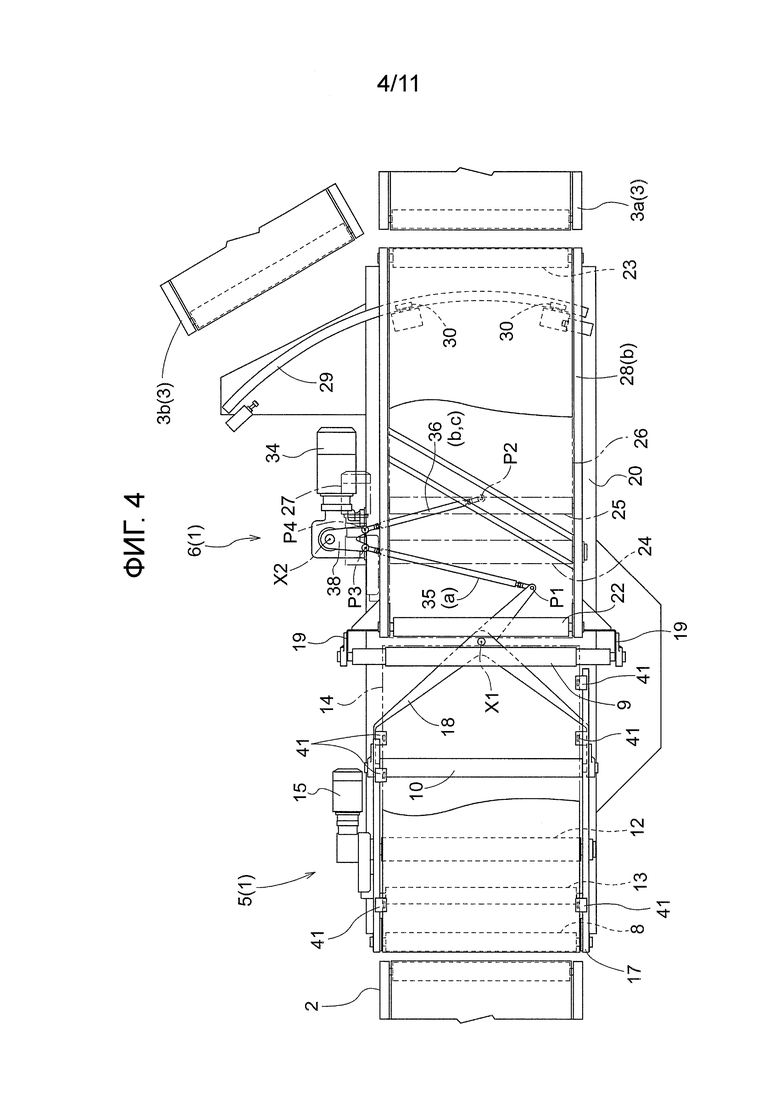
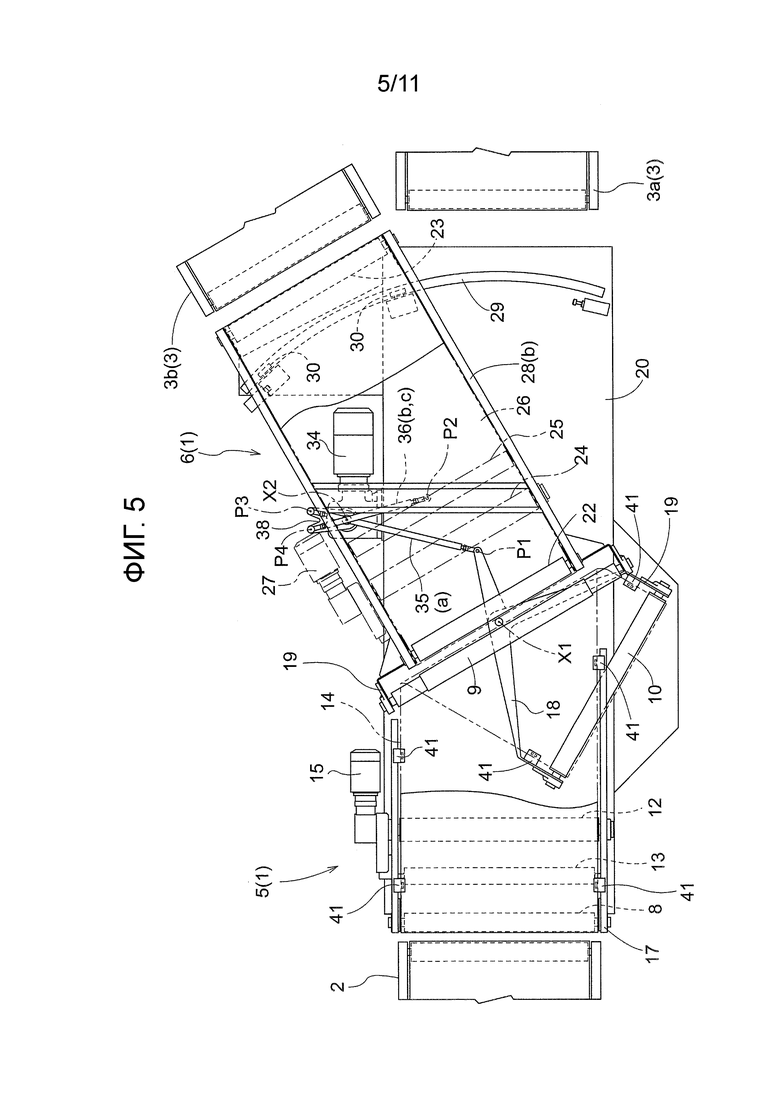
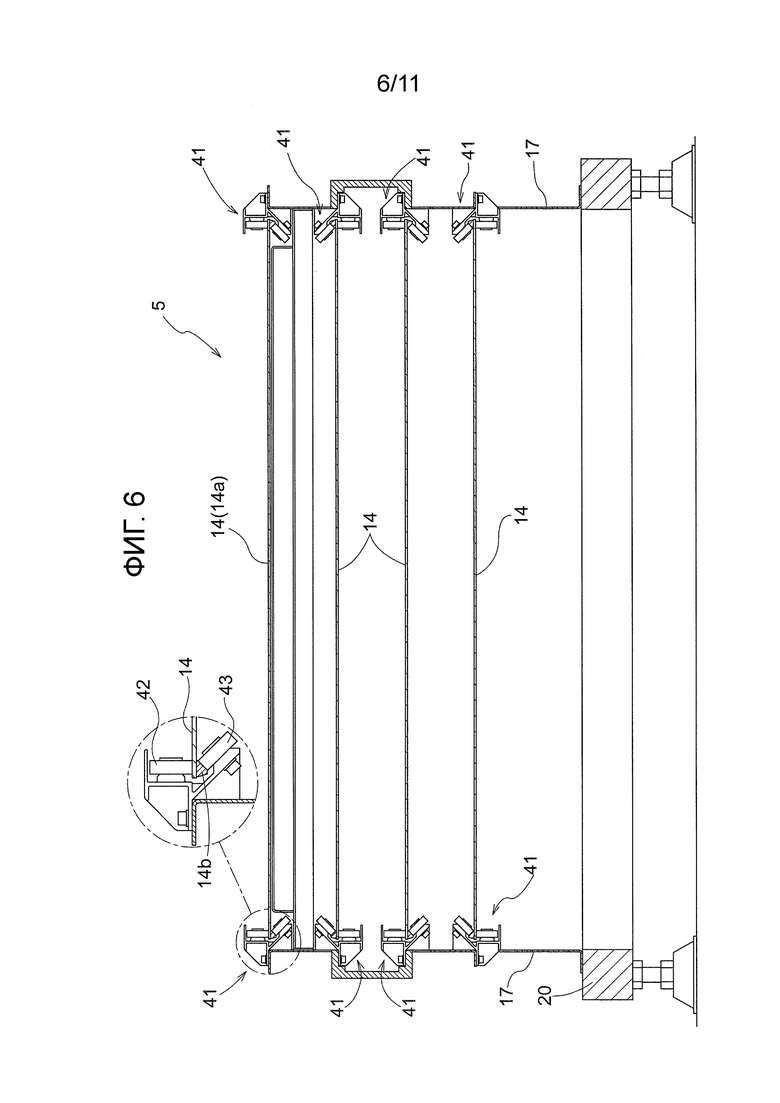
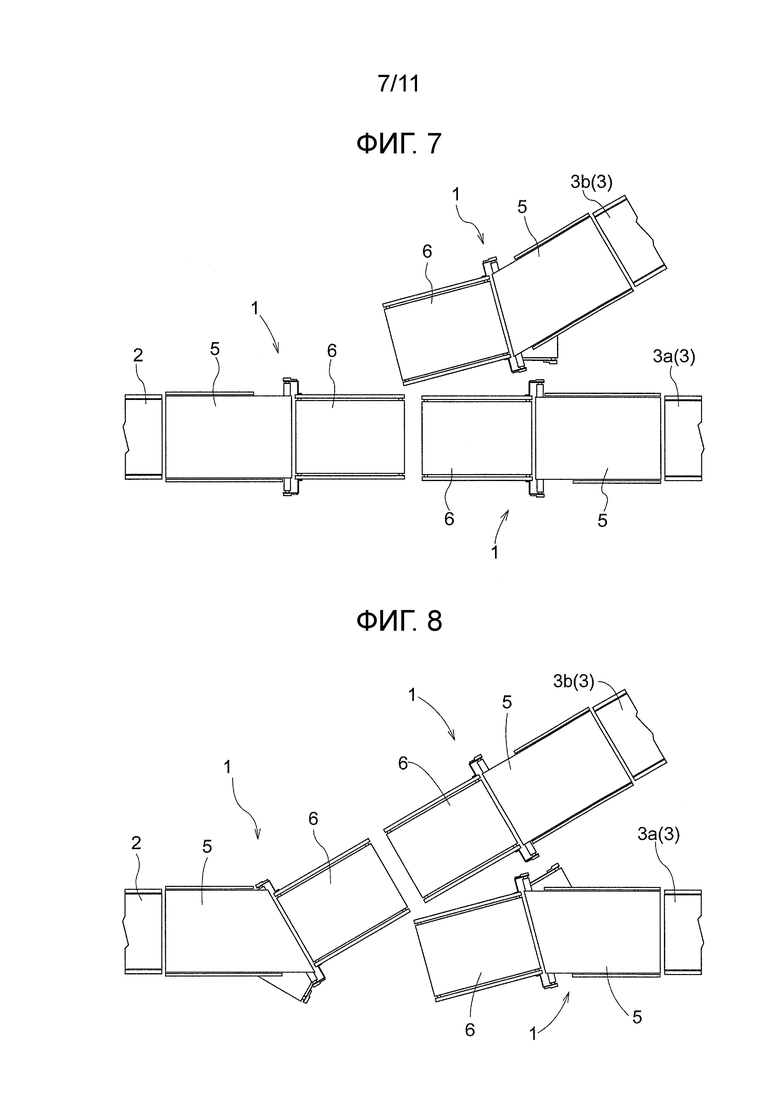
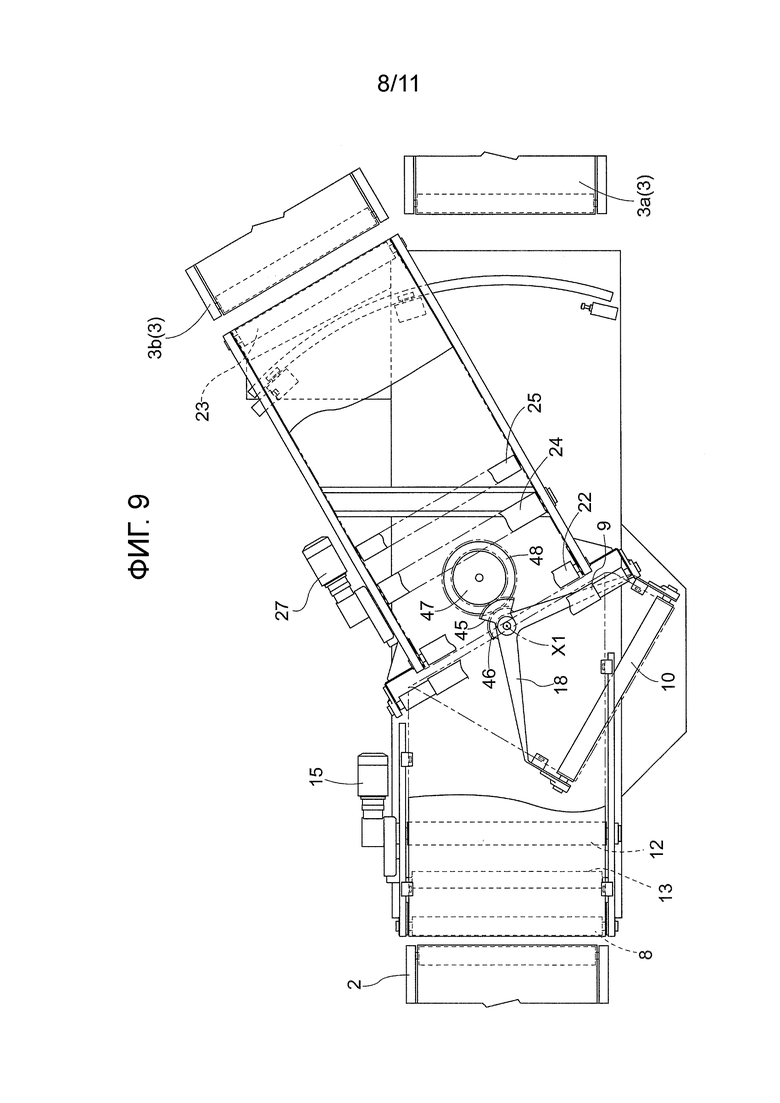
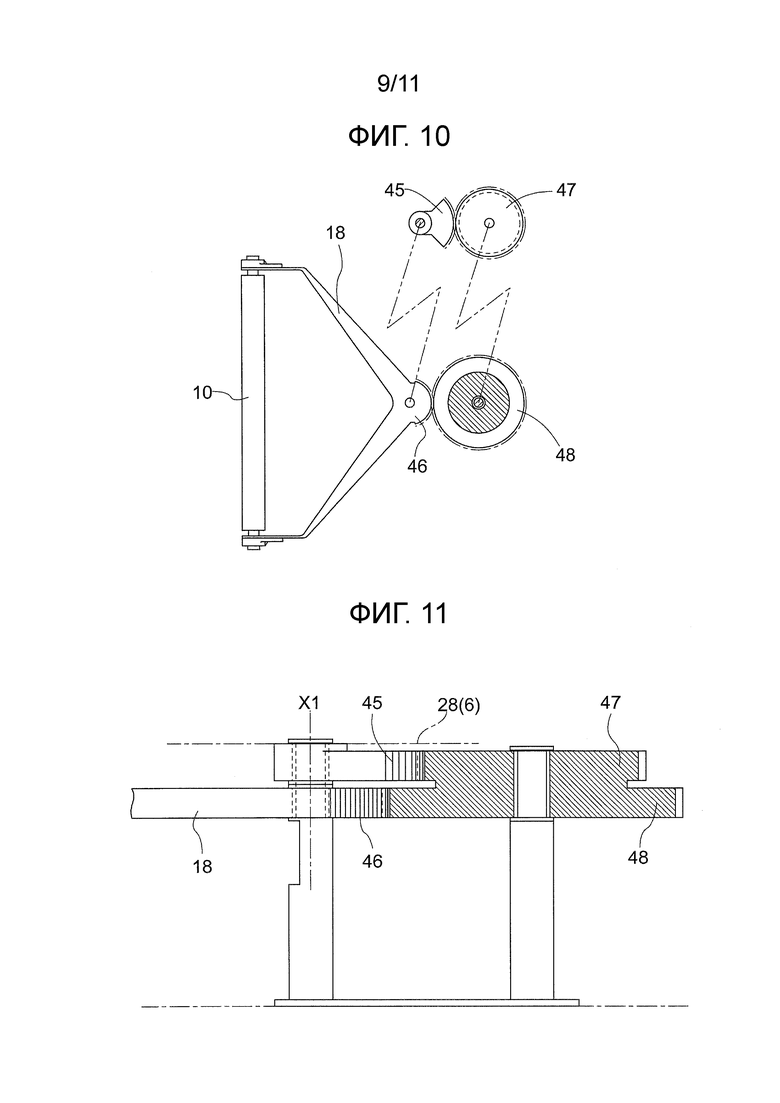
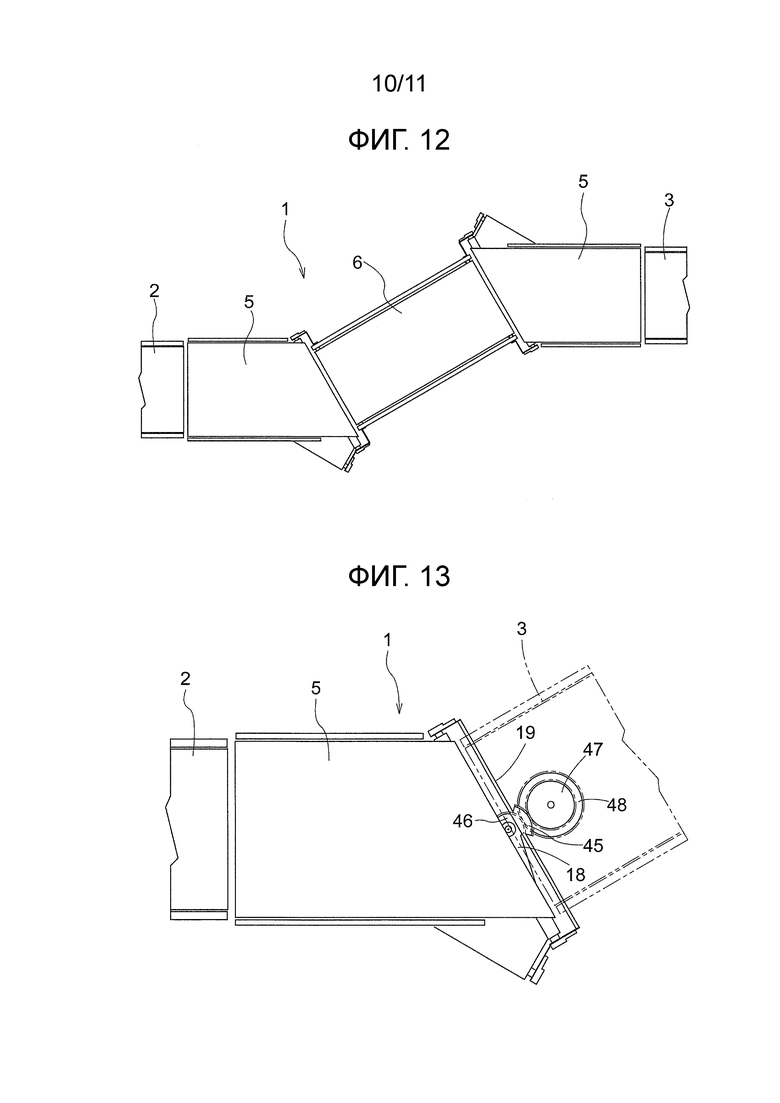
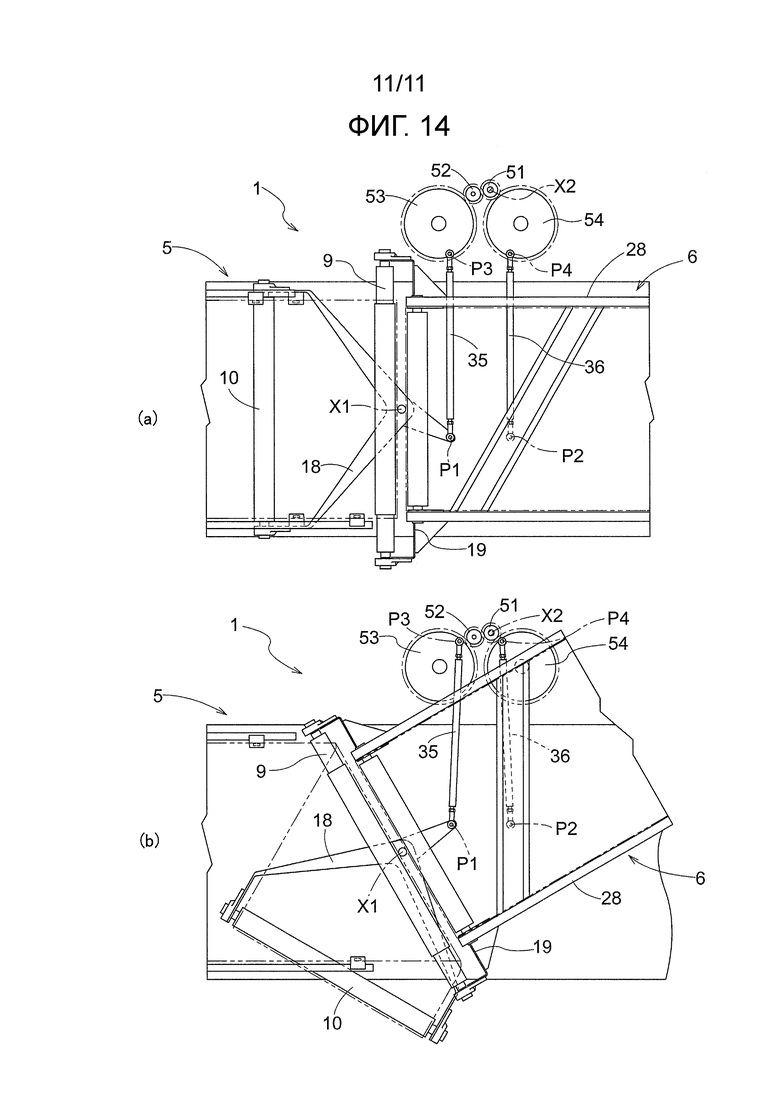
Транспортный конвейер имеет бесконечную ленту, намотанную поверх множества намоточных элементов и приводного вращающегося элемента. Второй транспортный намоточный элемент (9), первый перенаправляющий намоточный элемент (10) и второй перенаправляющий намоточный элемент закреплены с возможностью поворота вокруг вертикальной оси (Х1), проходящей вдоль вертикального направления и расположенной в концевой части транспортного конвейера (5), расположенной с другой стороны вдоль направления транспортирования. Предусмотрен механизм для поворота второго транспортного намоточного элемента (9), первого перенаправляющего намоточного элемента (10) и второго перенаправляющего намоточного элемента в состоянии, в котором они соединены, для поворота второго транспортного намоточного элемента (9) и второго перенаправляющего намоточного элемента как одного целого вокруг вертикальной оси (Х1) и для поворота первого перенаправляющего намоточного элемента (10) вокруг вертикальной оси (Х1) в направлении, в котором поворачиваются второй транспортный намоточный элемент (9) и второй перенаправляющий намоточный элемент, и на величину поворота, которая больше величины поворота второго транспортного намоточного элемента (9) и второго перенаправляющего намоточного элемента. Транспортный конвейер может быть выполнен компактным в боковом направлении. 2 н. и 6 з.п. ф-лы, 14 ил.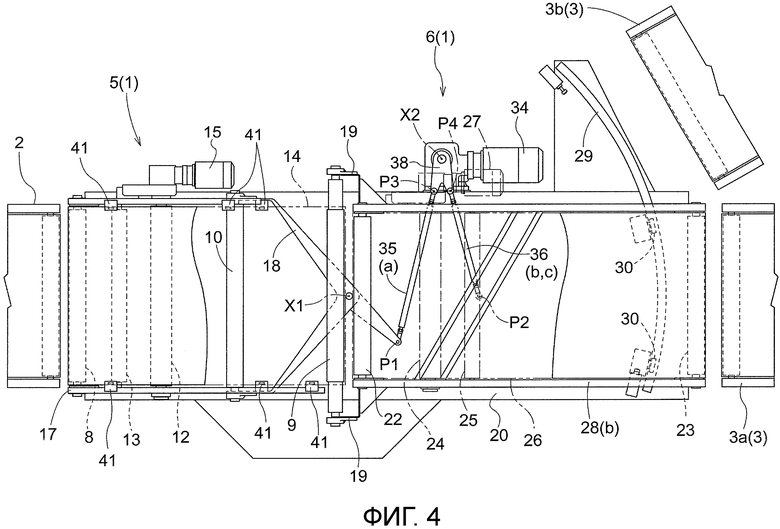
1. Транспортный конвейер, содержащий:
бесконечную ленту, намотанную поверх множества намоточных элементов и приводного вращающегося элемента;
приводное устройство для транспортирования, предназначенное для приведения во вращение приводного вращающегося элемента,
при этом транспортный конвейер транспортирует изделие, размещенное на обращенной вверх транспортирующей поверхности бесконечной ленты, по направлению транспортирования, в результате того, что приводной вращающийся элемент приводится во вращение приводным устройством для транспортирования для перемещения бесконечной ленты вдоль ее продольного направления,
отличающийся тем, что
в качестве множества намоточных элементов предусмотрены:
первый транспортный намоточный элемент, расположенный в концевой части - на соответствующей первому направлению стороне, которая представляет собой одну сторону вдоль направления транспортирования, - транспортирующей части, которая образует транспортирующую поверхность бесконечной ленты;
второй транспортный намоточный элемент, расположенный в концевой части - на соответствующей второму направлению стороне, которая представляет собой другую сторону вдоль направления транспортирования, - транспортирующей части;
первый перенаправляющий намоточный элемент, который расположен в более низком месте, чем первый транспортный намоточный элемент и второй транспортный намоточный элемент, и который расположен между первым транспортным намоточным элементом и вторым транспортным намоточным элементом вдоль направления транспортирования;
второй перенаправляющий намоточный элемент, который расположен в более низком месте, чем первый транспортный намоточный элемент и второй транспортный намоточный элемент, и который расположен с соответствующей второму направлению стороны первого перенаправляющего намоточного элемента вдоль направления транспортирования,
при этом бесконечная лента намотана поверх первого транспортного намоточного элемента, второго транспортного намоточного элемента, первого перенаправляющего намоточного элемента, второго перенаправляющего намоточного элемента и первого транспортного намоточного элемента в данном порядке,
при этом второй транспортный намоточный элемент, первый перенаправляющий намоточный элемент и второй перенаправляющий намоточный элемент поддерживаются с возможностью поворота вокруг вертикальной оси, проходящей вдоль вертикального направления и расположенной в концевой части транспортного конвейера, расположенной на стороне, соответствующей второму направлению, и
при этом предусмотрен механизм, обеспечивающий функциональное соединение и предназначенный для обеспечения поворота второго транспортного намоточного элемента, первого перенаправляющего намоточного элемента и второго перенаправляющего намоточного элемента в функционально соединенном состоянии для обеспечения поворота второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента как одного целого вокруг вертикальной оси и для обеспечения поворота первого перенаправляющего намоточного элемента вокруг вертикальной оси в направлении, в котором поворачиваются второй транспортный намоточный элемент и второй перенаправляющий намоточный элемент, и на величину поворота, которая больше величины поворота второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента.
2. Транспортный конвейер по п.1, отличающийся тем, что
каждый из первого транспортного намоточного элемента, второго транспортного намоточного элемента, первого перенаправляющего намоточного элемента и второго перенаправляющего намоточного элемента выполнен с возможностью вращения вокруг горизонтальной оси при перемещении бесконечной ленты вдоль ее продольного направления.
3. Транспортный конвейер по п.1 или 2, отличающийся тем, что
предусмотрены:
первая опорная рама, которая обеспечивает опору для первого перенаправляющего намоточного элемента и выполнена с возможностью поворота вокруг вертикальной оси;
вторая опорная рама, которая обеспечивает опору для второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента и выполнена с возможностью поворота вокруг вертикальной оси; и
базовая рама, которая обеспечивает опору для первого транспортного намоточного элемента и зафиксирована от перемещения вокруг вертикальной оси,
при этом приводной вращающийся элемент и приводное устройство для транспортирования опираются на базовую раму.
4. Транспортный конвейер по любому из пп.1-3, отличающийся тем, что
механизм, обеспечивающий функциональное соединение, включает в себя первый элемент, обеспечивающий функциональное соединение, который функционально соединяет первый перенаправляющий намоточный элемент с приводным устройством для поворота, и второй элемент, обеспечивающий функциональное соединение, который функционально соединяет второй транспортный намоточный элемент и второй перенаправляющий намоточный элемент с приводным устройством для поворота,
при этом механизм, обеспечивающий функциональное соединение, выполнен с возможностью перемещения первого элемента, обеспечивающего функциональное соединение, и второго элемента, обеспечивающего функциональное соединение, под действием приводного усилия, создаваемого приводным устройством для поворота, для обеспечения поворота первого перенаправляющего намоточного элемента, второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента в функционально соединенном состоянии.
5. Транспортное устройство, имеющее транспортный конвейер по любому из пп.1-4, отличающееся тем, что
предусмотрен соседний конвейер, расположенный с соответствующей второму направлению стороны транспортного конвейера и рядом с транспортным конвейером,
при этом механизм, обеспечивающий функциональное соединение, выполнен с возможностью поворота соседнего конвейера, второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента в функционально соединенном состоянии для обеспечения поворота соседнего конвейера, второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента как одного целого вокруг вертикальной оси.
6. Транспортное устройство по п.5, отличающееся тем, что
соседний конвейер выполнен с возможностью поворота вокруг вертикальной оси,
при этом механизм, обеспечивающий функциональное соединение, включает в себя первый элемент, обеспечивающий функциональное соединение, который функционально соединяет первый перенаправляющий намоточный элемент с приводным устройством для поворота, и второй элемент, обеспечивающий функциональное соединение, который функционально соединяет второй транспортный намоточный элемент и второй перенаправляющий намоточный элемент с приводным устройством для поворота, третий элемент, обеспечивающий функциональное соединение, который функционально соединяет соседний конвейер с приводным устройством для поворота, и
при этом механизм, обеспечивающий функциональное соединение, выполнен с возможностью перемещения первого элемента, обеспечивающего функциональное соединение, второго элемента, обеспечивающего функциональное соединение, и третьего элемента, обеспечивающего функциональное соединение, под действием приводного усилия, создаваемого приводным устройством для поворота, для обеспечения поворота первого перенаправляющего намоточного элемента, второго транспортного намоточного элемента, второго перенаправляющего намоточного элемента и соседнего конвейера в функционально соединенном состоянии.
7. Транспортное устройство по п.6, отличающееся тем, что
второй транспортный намоточный элемент и второй перенаправляющий намоточный элемент присоединены к соседнему конвейеру для поворота как одно целое с соседним конвейером вокруг вертикальной оси,
при этом второй элемент, обеспечивающий функциональное соединение, образован третьим элементом, обеспечивающим функциональное соединение, и соседним конвейером, и
при этом первый элемент, обеспечивающий функциональное соединение, и третий элемент, обеспечивающий функциональное соединение, предусмотрены в более низких местах, чем соседний конвейер.
8. Транспортное устройство по п.6 или 7, отличающееся тем, что
первая опорная рама, которая обеспечивает опору для первого перенаправляющего намоточного элемента, выполнена с возможностью поворота вокруг вертикальной оси,
при этом вторая опорная рама, которая обеспечивает опору для второго транспортного намоточного элемента и второго перенаправляющего намоточного элемента, присоединена к соседнему конвейеру для поворота как одно целое с соседним конвейером вокруг вертикальной оси,
при этом второй элемент, обеспечивающий функциональное соединение, образован третьим элементом, обеспечивающим функциональное соединение, и соседним конвейером,
при этом при месте, в котором первый элемент, обеспечивающий функциональное соединение, присоединен к первой опорной раме, определяемом как первое место соединения, и при месте, в котором третий элемент, обеспечивающий функциональное соединение, присоединен к соседнему конвейеру, определяемом как второе место соединения, механизм, обеспечивающий функциональное соединение, выполнен с такой конфигурацией, что первое место соединения и второе место соединения перемещаются вокруг вертикальной оси в одном и том же направлении и на одно и то же расстояние по прямой линии в результате того, что первый элемент, обеспечивающий функциональное соединение, и третий элемент, обеспечивающий функциональное соединение, перемещаются на заданную величину за счет приведения в действие приводного устройства для поворота, и
при этом соотношение между первым радиусом поворота, который представляет собой расстояние от вертикальной оси до первого места соединения, и вторым радиусом поворота, который представляет собой расстояние от вертикальной оси до второго места соединения, задано на основе соотношения между величиной поворота первой опорной рамы и величиной поворота второй опорной рамы.
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
| US 20110315514 A1, 29.12.2011 | |||
| US 2011315523 A1, 29.12.2011 | |||
| US 4633996 A, 06.01.1987. | |||

