ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
1. Область техники, к которой относится изобретение
[0001] Изобретение относится к приводной системе, автомобилю и способу управления приводной системой, а именно к приводной системе, содержащей электромотор и инвертор, способу управления приводной системой и автомобилю, на котором такая приводная система установлена.
2. Описание предшествующего уровня техники
[0002] В качестве одного примера приводной системы данного типа предлагается приводная система, содержащая трехфазный электромотор и инвертор, преобразующий трехфазное постоянное напряжение от источника постоянного тока в переменное напряжение путем включения и выключения переключающих устройств, а также выводы переменного напряжения на электромотор (например, см. японскую патентную заявку №JP 2016-5370 А). Приводная система выполнена с возможностью формирования ШИМ-сигнала (широтно-импульсная модуляция) путем сравнения модулирующей волны (основная волна) с несущей волной, и направления этого сигнала на инвертор. Приводная система определяет продолжительность периода как произведение 1/6 периода модулирующей волны и случайного числа, рассчитывает множество частот несущей волны путем умножения частоты модулирующей волны на различные кратные 3 нечетные коэффициенты, и переключает частоты несущей волны в соответствии с продолжительностью периода. Таким образом, в заданном частотном диапазоне предотвращают выделение гармоник или слишком большую амплитуду гармоник, а также уменьшают электромагнитные помехи.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0003] В соответствии с вышеуказанным описанием приводной системы, сегмент несущей волны между двумя экстремальными значениями (между максимальным значением и минимальным значением и между минимальным значением и максимальным значением) определен, как единичная составляющая, число единичных составляющих на каждом единичном интервале (1/6 периода модулирующей волны) переключается в соответствии с продолжительностью периода (например, один единичный интервал, два единичных интервала, три единичных интервала). Таким образом, число единичных составляющих на каждом единичном интервале может не быть установлено на предпочтительное значение. То есть, по меньшей мере, на одном единичном интервале сразу после переключения число единичных составляющих на единичном интервале непосредственно до переключения выбрать нельзя.
[0004] Приводная система, автомобиль и способ управления приводной системой в соответствии с данным изобретением обеспечивают уменьшение электромагнитных помех при установке числа единичных составляющих на каждом единичном интервале на предпочтительное значение.
[0005] В первом аспекте изобретение имеет отношение к приводной системе. Приводная система содержит многофазный электромотор и инвертор, включающий в себя множеством переключающих устройств и выполненный с возможностью приведения электромотора в движение посредством переключения упомянутых переключающих устройств, а также электронный блок управления, выполненный с возможностью управления посредством широтно-импульсной модуляции. Управление посредством широтно-импульсной модуляции является процессом управления, при котором формируют широтно-импульсно модулированные сигналы от множества упомянутых переключающих устройств путем сравнения модулирующей волны команды напряжения каждой фазы, основанной на команде крутящего момента электромотора, с несущей волной, и выполняют переключение множества упомянутых переключающих устройств. Электронный блок управления выполнен с возможностью формирования несущей волны таким образом, чтобы выполнялись условия i) и ii), как указано ниже, причем единичная составляющая является сегментом несущей волны между двумя последовательными экстремальными значениями, а единичный интервал является интервалом заданной электрической угловой ширины, полученным путем деления одного периода модулирующей волны команды напряжения на удвоенное число фаз электромотора, при этом несущая волна распространяется через множество единичных составляющих. Упоминаемыми выше условиями являются первое условие (i), согласно которому на каждом из единичных интервалов, требуемое время на указанном единичном интервале равно суммарному времени множества единичных составляющих, и второе условие (ii), согласно которому, по меньшей мере, на одном из указанных единичных интервалов длительности, по меньшей мере, двух единичных составляющих из множества единичных составляющих отличны друг от друга.
[0006] Поскольку сегмент несущей волны между двумя экстремальными значениями определен, как «единичная составляющая», а интервал заданной электрической угловой ширины, полученный делением одного периода (360 градусов электрического угла) модулирующей волны команды напряжения на удвоенное число фаз электромотора, определен, как «единичный интервал», электронный блок управления формирует несущую волну таким образом, чтобы требуемое время на единичном интервале было равно суммарному времени множества единичных составляющих на каждом единичном интервале, и длительности, по меньшей мере, двух единичных составляющих из множества единичных составляющих отличались друг от друга, по меньшей мере, на одном единичном интервале. При такой конфигурации можно уменьшить электромагнитные помехи, предотвращая выделение гармоник в заданном частотном диапазоне при установке числа единичных составляющих на каждом единичном интервале на предпочтительное значение.
[0007] В приводной системе в соответствии с вышеуказанным описанием электронный блок управления может быть выполнен с возможностью формирования несущей волны таким образом, чтобы длительность единичной составляющей изменялась случайным образом. При такой конфигурации можно дополнительно уменьшить электромагнитные помехи.
[0008] В приводной системе в соответствии с вышеуказанным описанием электронный блок управления может быть выполнен с возможностью формирования несущей волны таким образом, чтобы число единичных составляющих было постоянным на двух последовательных единичных интервалах из единичных интервалов. В такой конфигурации, число единичных составляющих на каждом единичном интервале может быть сделано постоянным и равным предпочтительному значению, когда скорость вращения электромотора и число синхронизации постоянны. Здесь, под «числом Ns синхронизации» понимается число периодов несущей волны в одном периоде (360 градусов электрического угла) модулирующей волны команды напряжения каждой фазы.
[0009] В приводной системе в соответствии с вышеуказанным описанием электронный блок управления может быть выполнен с возможностью формирования несущей волны таким образом, чтобы на двух последовательных единичных интервалах, в качестве, по меньшей мере, части из множества единичных интервалов, длительности единичных составляющих непосредственно до и сразу после границы двух последовательных единичных интервалов могли быть равны друг другу. Электронный блок управления может быть выполнен с возможностью формирования несущей волны таким образом, чтобы, по меньшей мере, на части единичных интервалов, на каждом из которых число единичных составляющих равно первому заранее заданному числу, длительности второго заранее заданного числа последовательных единичных составляющих из единичных составляющих на том же единичном интервале были равны друг другу, причем первое заранее заданное число больше или равно 3, а второе заранее заданное число больше или равно 2 и меньше первого заранее заданного числа. Такая конфигурация позволяет более эффективно рассеивать гармоники.
[0010] В приводной системе в соответствии с вышеупомянутым описанием электронный блок управления может быть выполнен с возможностью формирования несущей волны таким образом, чтобы каждый момент времени перехода через ноль, при котором модулирующая волна команды напряжения любой из фаз пересекает ноль на оси, совпадал с конечным моментом времени каждого единичного интервала. Такая конфигурация позволяет дополнительно повысить управляемость электромотора.
[0011] В приводной системе в соответствии с вышеупомянутым описанием число фаз электромотора может быть равно 3, и требуемым временем на единичном интервале может быть период времени, требуемый для поворота электромотора на 60 градусов электрического угла.
[0012] Во втором аспекте изобретение имеет отношение к приводной системе. Приводная система содержит многофазный электромотор и инвертор, включающий в себя множество переключающих устройств и выполненный с возможностью приведения электромотора в движение посредством переключения упомянутых переключающих устройств, причем электронный блок управления выполнен с возможностью управления посредством широтно-импульсной модуляции. Управление посредством широтно-импульсной модуляции является способом управления, при котором формируют широтно-импульсно модулированные сигналы от множества упомянутых переключающих устройств путем сравнения модулирующей волны команды напряжения каждой фазы, основанной на команде крутящего момента электромотора с несущей волной, и выполняют переключение множества упомянутых переключающих устройств. Электронный блок управления выполнен с возможностью формирования несущей волны таким образом, чтобы выполнялись условия i) и ii), как указано ниже, причем единичная составляющая является сегментом несущей волны между двумя последовательными экстремальными значениями, а единичный интервал является интервалом заданной электрической угловой ширины, полученным путем деления одного периода модулирующей волны команды напряжения на удвоенное число фаз электромотора, при этом несущая волна распространяется через множество единичных составляющих. Упоминаемыми выше условиями являются первое условие (i), согласно которому на каждом единичном интервале требуемое время на указанном единичном интервале должно равняться суммарному времени множества единичных составляющих, и второе условие (ii), согласно которому, по меньшей мере, на одном из указанных единичных интервалов частоты, по меньшей мере, двух единичных составляющих должны отличаться друг от друга.
[0013] Поскольку сегмент несущей волны между двумя экстремальными значениями определен, как «единичная составляющая», а интервал заданной электрической угловой ширины, полученный делением одного периода (360 градусов электрического угла) модулирующей волны команды напряжения на удвоенное число фаз электромотора, определен как «единичный интервал», электронный блок управления формирует несущую волну таким образом, чтобы требуемое время на единичном интервале было равно суммарному времени множества единичных составляющих на каждом единичном интервале, и частоты, по меньшей мере, двух единичных составляющих из множества единичных составляющих отличались друг от друга, по меньшей мере, на одном единичном интервале. При такой конфигурации можно уменьшить электромагнитные помехи, предотвращая выделение гармоник в заданном частотном диапазоне при установке числа единичных составляющих на каждом единичном интервале на предпочтительное значение.
[0014] В третьем аспекте изобретение имеет отношение к приводной системе. Приводная система содержит многофазный электромотор и инвертор, включающий в себя множество переключающих устройств и выполненный с возможностью приведения электромотора в движение посредством переключения упомянутых переключающих устройств, а также электронный блок управления, выполненный с возможностью управления посредством широтно-импульсной модуляции. Управление посредством широтно-импульсной модуляции является способом управления, при котором формируют широтно-импульсные модулированные сигналы от множества упомянутых переключающих устройств путем сравнения модулирующей волны команды напряжения каждой фазы на основе команды крутящего момента электромотора с несущей волной, и выполняют переключение множества переключающих устройств. Электронный блок управления выполнен с возможностью формирования несущей волны таким образом, чтобы выполнялись условия i) и ii), как указано ниже, причем единичная составляющая является сегментом несущей волны между двумя последовательными экстремальными значениями, а единичный интервал является интервалом заданной электрической угловой ширины, полученным путем деления одного периода модулирующей волны команды напряжения на удвоенное число фаз электромотора, при этом несущая волна распространяется через множество единичных составляющих. Упоминаемыми выше условиями являются первое условие (i), согласно которому на каждом единичном интервале, требуемое время на единичном интервале должно равняться суммарному времени множества единичных составляющих, и второе условие (ii), согласно которому, по меньшей мере, на одном из указанных единичных интервалов абсолютные значения углов наклона, по меньшей мере, двух единичных составляющих должны отличаться друг от друга.
[0015] Поскольку сегмент несущей волны между двумя экстремальными значениями называется «единичной составляющей», а интервал заданной электрической угловой ширины, полученный путем деления одного периода (360 градусов электрического угла) модулирующей волны команды напряжения на удвоенное число фаз электромотора, называется «единичным интервалом», при этом электронный блок управления формирует несущую волну таким образом, чтобы требуемое время на единичном интервале было равно суммарному времени множества упомянутых единичных компонентов на каждом единичном интервале, и абсолютные значения углов наклона, по меньшей мере, двух единичных составляющих из множества единичных составляющих отличались друг от друга, по меньшей мере, на одном единичном интервале. При такой конфигурации можно уменьшить электромагнитные помехи, предотвращая выделение гармоник в заданном частотном диапазоне при установке числа единичных составляющих на каждом единичном интервале на предпочтительное значение.
[0016] В четвертом аспекте изобретение имеет отношение к приводной системе. Приводная система содержит многофазный электромотор и инвертор, включающий в себя множество переключающих устройств, и выполнена с возможностью приведения электромотора в движение посредством переключения упомянутых переключающих устройств, а также электронный блок управления, выполненный с возможностью управления посредством широтно-импульсной модуляции. Управление посредством широтно-импульсной модуляции является способом управления, при котором путем сравнения модулирующей волны команды напряжения каждой фазы, основанной на команде крутящего момента электромотора, с несущей волной, формируются широтно-импульсно модулированные сигналы от множества упомянутых переключающих устройств, и выполняют переключение множества упомянутых переключающих устройств. Электронный блок управления выполнен с возможностью формирования несущей волны таким образом, чтобы выполнялись условия i) и ii), как указано ниже, причем единичная составляющая является сегментом несущей волны между двумя последовательными экстремальными значениями, а единичный интервал является интервалом заданной электрической угловой ширины, полученным путем деления одного периода модулирующей волны команды напряжения на удвоенное число фаз электромотора, при этом несущая волна распространяется через множество единичных составляющих. Упоминаемыми выше условиями являются первое условие (i), согласно которому на каждом единичном интервале, требуемое время на единичном интервале должно равняться суммарному времени множества единичных составляющих, и второе условие (ii), согласно которому, по меньшей мере, на одном из указанных единичных интервалов значения электрической угловой ширины, по меньшей мере, двух единичных составляющих должны отличаться друг от друга.
[0017] Поскольку сегмент несущей волны между двумя экстремальными значениями называется «единичной составляющей», а интервал заданной электрической угловой ширины, полученный делением одного периода (360 градусов электрического угла) модулирующей волны команды напряжения на удвоенное число фаз электромотора, называется «единичным интервалом», электронный блок управления формирует несущую волну таким образом, чтобы требуемое время на единичном интервале было равно суммарному времени множества единичных составляющих на каждом единичном интервале, и значения электрической угловой ширины, по меньшей мере, двух единичных составляющих из множества единичных составляющих отличались друг от друга, по меньшей мере, на одном единичном интервале. При такой конфигурации можно уменьшить электромагнитные помехи, предотвращая выделение гармоник в заданном частотном диапазоне при установке числа единичных составляющих на каждом единичном интервале на предпочтительное значение.
[0018] В пятом варианте осуществления изобретение имеет отношение к автомобилю, на котором установлена описанная выше приводная система, и который выполнен с возможностью перемещения за счет передаваемой от электромотора мощности. При такой конфигурации приводная система в любом из вышеописанных аспектов изобретения устанавливается на автомобиль, таким образом, автомобиль обеспечивает результаты, схожие с описанными выше результатами, например, уменьшение электромагнитных помех при установлении числа единичных составляющих на каждом единичном интервале на предпочтительное значение. В результате этого, водитель или пассажир(-ы) и т.д., находящиеся вблизи автомобиля с меньшей вероятностью будут испытывать электромагнитные помехи или не будут испытывать их совсем.
[0019] В пятом варианте осуществления изобретение имеет отношение к автомобилю. Автомобиль содержит многофазный электромотор и инвертор со множеством переключающих устройств, выполненный с возможностью приведения электромотора в движение посредством переключения упомянутых переключающих устройств, а также электронный блок управления, выполненный с возможностью управления посредством широтно-импульсной модуляции. Управление посредством широтно-импульсной модуляции является способом управления, при котором формируют широтно-импульсно модулированные сигналы от множества упомянутых переключающих устройств путем сравнения модулирующей волны команды напряжения каждой фазы, основанной на команде крутящего момента электромотора с несущей волной, и выполняют переключение множества упомянутых переключающих устройств. Электронный блок управления выполнен с возможностью формирования несущей волны таким образом, чтобы выполнялись условия i) и ii), как указано ниже, причем единичная составляющая является сегментом несущей волны между двумя последовательными экстремальными значениями, а единичный интервал является интервалом заданной электрической угловой ширины, полученным путем деления одного периода модулирующей волны команды напряжения на удвоенное число фаз электромотора, при этом несущая волна распространяется через множество единичных составляющих. Упоминаемыми выше условиями являются первое условие (i), согласно которому на каждом единичном интервале, требуемое время на единичном интервале должно быть равно суммарному времени множества единичных составляющих, и второе условие (ii), согласно которому, по меньшей мере, на одном единичном интервале длительности, по меньшей мере, двух единичных составляющих должны быть отличны друг от друга.
[0020] Вышеописанный способ позволяет уменьшить электромагнитные помехи, предотвращая выделение гармоник в заданном частотном диапазоне при установке числа единичных составляющих на каждом единичном интервале на предпочтительное значение.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0021] Отличительные признаки, преимущества, техническая и промышленная значимость типовых вариантов осуществления настоящего изобретения раскрыты ниже со ссылкой на сопроводительные чертежи, в которых одинаковые цифры обозначают сходные элементы:
ФИГ. 1 представляет собой схематическое изображение конфигурации электрического транспортного средства (20), на котором установлена приводная система в одном варианте осуществления изобретения;
ФИГ. 2 представляет собой блок-схему с одним примером процедуры формирования несущей волны, выполняемой электронным блоком (50) управления;
ФИГ. 3 представляет собой пояснительный вид с одним примером способа формирования несущей волны;
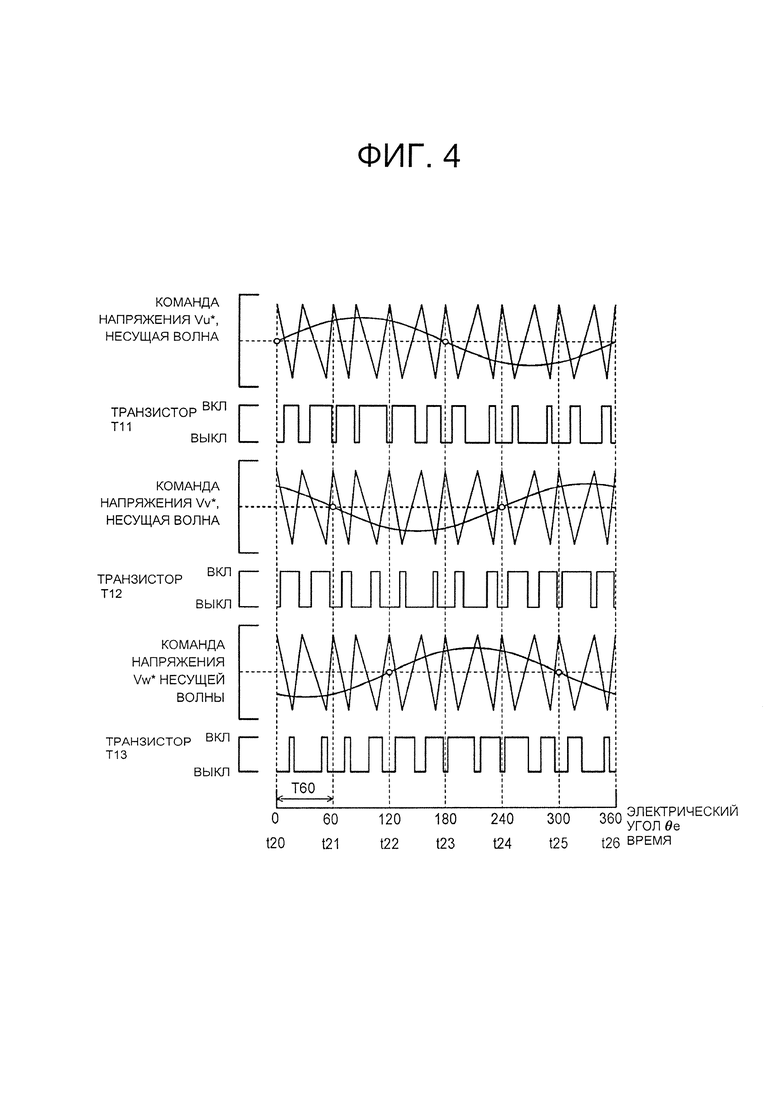
ФИГ. 4 представляет собой пояснительный вид с примером форм модулирующих волн Vu*, Vv*, Vw* команд напряжения соответствующих фаз, несущих волн и ШИМ-сигналов транзисторов Т11, Т12, Т13;
ФИГ. 5 представляет собой пояснительный вид с примером форм модулирующих волн Vu*, Vv*, Vw* команд напряжения соответствующих фаз, несущих волн и ШИМ-сигналов транзисторов T11, Т12, Т13;
ФИГ. 6 представляет собой пояснительный вид с одним примером несущей волны, относящейся к модифицированному примеру;
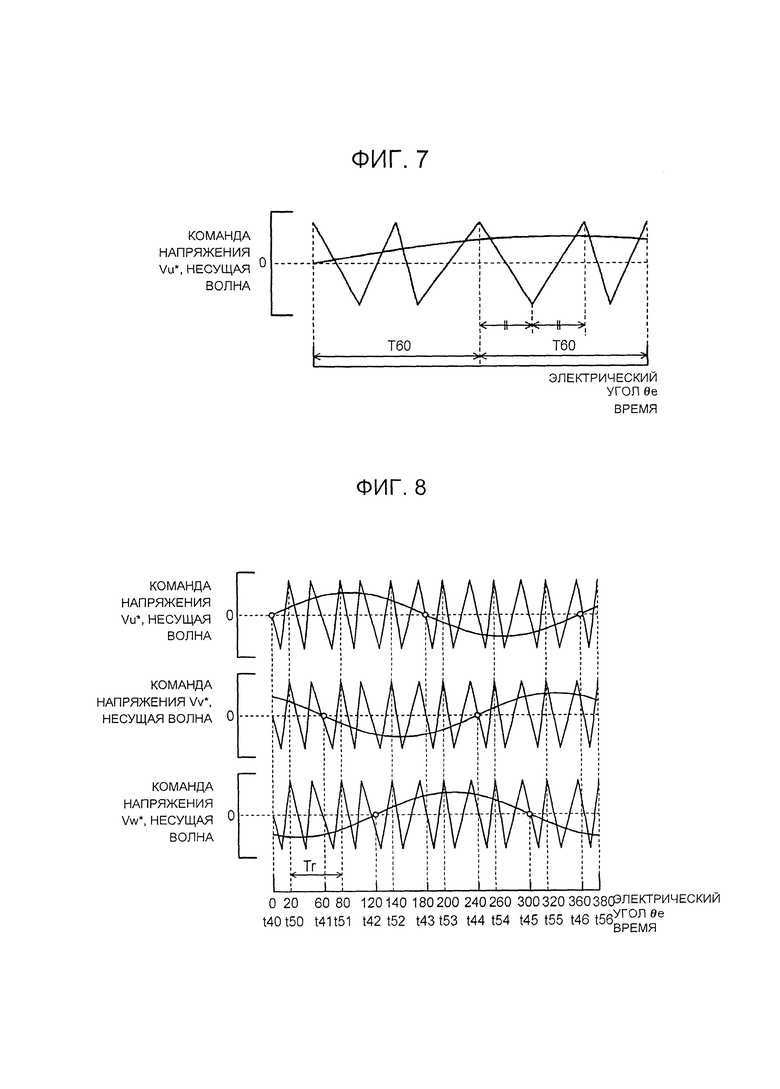
ФИГ. 7 представляет собой пояснительный вид с одним примером несущей волны, относящейся к модифицированному примеру;
ФИГ. 8 представляет собой пояснительный вид с примером форм модулирующих волн Vu*, Vv*, Vw* команд напряжения соответствующих фаз и несущей волны в модифицированном примере; и
ФИГ. 9 представляет собой блок-схему с одним примером процедуры формирования несущей волны, относящимся к модифицированному примеру.
ДЕТАЛЬНОЕ РАСКРЫТИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
[0022] Далее будет раскрыт один вариант осуществления настоящего изобретения.
[0023] На Фиг. 1 схематически показана конфигурация электрического транспортного средства (20), на котором установлена приводная система как один из вариантов осуществления изобретения. Как показано на Фиг. 1, электрическое транспортное средство (20) в настоящем варианте осуществления содержит электромотор (32), инвертор (34), батарею (36) как устройство накопления энергии, повышающий преобразователь (40) и электронный блок (50) управления.
[0024] Электромотор (32) выполнен, как трехфазный синхронный генератор-электромотор и содержит ротор, в котором встроены постоянные магниты, и статор с катушечной трехфазной обмоткой. Ротор электромотора (32) соединен с приводным валом (26), который соединен с приводными колесами (22а), (22b) через узел дифференциального редуктора (24).
[0025] Инвертор (34) используют для приведения электромотора (32) в движение. Инвертор (34) соединен с повышающим преобразователем (40) через высоковольтную сторону питающей линии (42), и содержит шесть транзисторов (T11-Т16) и шесть диодов (D11-D16), подключенных параллельно с шестью транзисторами (T11-Т16), соответственно. Транзисторы (T11-Т16) размещены попарно таким образом, чтобы транзисторы каждой пары располагались на стороне источника и стороне стока между плюсовой линией и минусовой линией высоковольтной стороны питающей линии (42), соответственно. Кроме того, трехфазные катушки (катушки U фазы, V фазы и W фазы) электромотора (32) соответствующим образом подключены к точкам подключения между соответствующими парами транзисторов (Т11-Т16). Соответственно, при подаче напряжения на преобразователь (34), электронный блок (50) управления управляет числом количества раз включения каждой пары транзисторов (T11-Т16) таким образом, чтобы трехфазные катушки создавали вращающиеся магнитные поля, и электромотор (32) приводился во вращение. Сглаживающий конденсатор (46) подключен к плюсовой линии и минусовой линии высоковольтной стороны питающей линии (42).
[0026] Батарея (36) является, например, литий-ионной перезаряжаемой батареей или никель-металл-гидридной перезаряжаемой батареей и подключается к повышающему преобразователю (40) через низковольтную сторону питающей линии (44). Сглаживающий конденсатор (48) подключен к плюсовой линии и минусовой линии, которые относятся к низковольтной стороне питающей линии (44).
[0027] Повышающий преобразователь (40) подключен к высоковольтной стороне питающей линии (42) и низковольтной стороне питающей линии (44) и содержит два транзистора (Т31, Т32), два диода (D31, D32), подключенных параллельно с двумя транзисторами (Т31, Т32), соответственно, а также дроссель (L). Транзистор (Т31) подключен к плюсовой линии, относящейся к высоковольтной стороне питающей линии (42). Транзистор (Т32) подключен к транзистору (Т31) и минусовым линиям высоковольтной стороны питающей линии (42) и низковольтной стороны питающей линии (44). Дроссель (L) подключен в точке подключения между транзисторами (Т31, Т32) и плюсовой линией, относящейся к низковольтной стороне питающей линии (44). Электронный блок (50) управления управляет соотношением количества раз включения транзисторов (Т31, Т32) таким образом, чтобы повышающий преобразователь (40) повышал или увеличивал напряжение низковольтной стороны питающей линии (44) и подавал результирующую мощность на высоковольтную сторону питающей линии (42), или понижал напряжение высоковольтной стороны питающей линии (42), и подавал результирующую мощность на низковольтную сторону питающей линии (44).
[0028] Электронный блок (50) управления выполнен как микропроцессор с ЦПУ (52) в качестве основного компонента и содержит хранящее обрабатывающие программы ПЗУ (54), ОЗУ (56)для временного хранения данных, а также входной и выходной порт, наряду с ЦПУ (52). Электронный блок (50) управления получает сигналы от различных датчиков через входной порт. Поступающие в электронный блок (50) управления сигналы могут включать, например, значение углового положения θm от датчика углового положения (такого как фазовый датчик положения), определяющего угловое положение ротора электромотора (32), и значения фазовых токов lu, lv электромотора (32) от датчиков (32u, 32v) тока, определяющих фазовые токи в соответствующих фазах электромотора (32). Входные сигналы также могут включать в себя напряжение Vb от датчика (36а) напряжения, установленного между клеммами батареи (36), и ток Ib, от датчика (36b) тока, установленного на выходной клемме батареи (36). Входные сигналы также могут включать в себя напряжение VH на конденсаторе (46) (высоковольтной стороны питающей линии (42)) от датчика (46а) напряжения, установленного между клеммами конденсатора (46), а также напряжение VL конденсатора (48) (низковольтной стороны питающей линии (44)) от датчика (48а) напряжения, установленного между клеммами конденсатора (48). Дополнительно входные сигналы могут также включать в себя сигнал зажигания от включателя (60) зажигания, и положение (SP) переключения от датчика (62) положения переключения, определяющего рабочее положение рычага (61) переключения передач. Кроме того, входные сигналы включают в себя ход (Acc) педали акселератора от датчика (64) положения педали акселератора, определяющего степень нажатия на педаль (63) акселератора, положение (BP) педали тормоза от датчика (66) положения педали тормоза, определяющего степень нажатия на педаль (65) тормоза, и скорость (V) транспортного средства от датчика (68) скорости транспортного средства. Электронный блок (50) управления выдает различные сигналы управления через выходной порт. Выходные сигналы от электронного блока (50) управления включают в себя, например, сигналы управления переключением к транзисторам (Т1-Т6) инвертора (34) и сигналы управления переключением к транзисторам (Т31, Т32) повышающего преобразователя (40). Электронный блок (50) управления рассчитывает фазу θе, угловую скорость ωm и скорость (Nm) вращения электромотора (32) на основе углового положения (θm) ротора электромотора (32) от датчика (32а) определения углового положения. Электронный блок (50) управления также рассчитывает степень (SOC) зарядки (состояние заряда) батареи (36) на основе суммарного значения силы (Ib) тока батареи (36) от датчика (36b) силы тока. Здесь, степень зарядки батареи (SOC) является соотношением количества электрической энергии, которое может быть подано от батареи (36), к полной емкости батареи (36).
[0029] В электрическом транспортном средстве (20) этого варианта осуществления, выполненного согласно описанию выше, электронный блок (50) управления устанавливает требуемый крутящий момент (Td*), предназначенный для передачи на приводной вал (26), на основе хода (Acc) педали акселератора и скорости (V) транспортного средства, причем устанавливает требуемый крутящий момент (Td*) для команды (Tm*) крутящего момента электромотора (32) и выполняет управление переключением транзисторов (T11-Т16) инвертора (34) таким образом, чтобы электромотор (32) приводился в движение в соответствии с командой (Tm*) крутящего момента. Кроме того, электронный блок (50) управления устанавливает целевое напряжение (VH*) высоковольтной стороны питающей линии (42) так, чтобы электромотор (32) приводился в движение в соответствии с командой (Tm*) крутящего момента, и выполняет управление переключением транзисторов (Т31, Т32) повышающего преобразователя (40) так, чтобы напряжение (VH) высоковольтной стороны питающей линии (42) было равно целевому напряжению (VH*).
[0030] Далее описывается управление инвертором (34). В данном варианте осуществления изобретения инвертор (34) управляется с помощью синхронной широтно-импульсной модуляции (управление посредством синхронной ШИМ). Причина применения синхронной ШИМ, если выбирать между синхронной ШИМ и асинхронной ШИМ, заключается в том, что сокращение потерь на гармониках и обеспечение стабильности управления могут быть достигнуты, если понижается частота несущей волны (несущая частоты).
[0031] Когда на инверторе (34) осуществляется управление посредством синхронной ШИМ, электронный блок (50) управления в первую очередь выполняет координатное преобразование (преобразование из трех фаз в две фазы) для преобразования фазовых токов Iu, Iv фазы U и фазы V в токи Id и Iq оси d и оси q, используя электрический угол θе электромотора (32), с условием, что сумма фазовых токов Iu, Iv, Iw трех соответствующих фаз (фаза U, фаза V, фаза W) электромотора (32) равна нулю. Затем, на основе команды (Tm*) крутящего момента электромотора (32) устанавливаются команды (Id*, Iq*) силы тока по оси d и оси q, а также устанавливаются команды (Vd*, Vq*) напряжения по оси d и оси q с использованием команд (Id*, Iq*) силы тока по осям d и q, и токов ld и lq. После этого электронный блок (50) управления выполняет координатное преобразование (преобразование двух фаз на три фазы) для преобразования команд (Vd*, Vq*) напряжения по оси d и оси q в модулирующие волны (Vu*, Vv*, Vw*) команд напряжения соответствующих фаз, используя электронный угол θе электромотора (32), и формирует ШИМ-сигналы транзисторов (T11-Т16), путем сравнения модулирующих волн Vu*, Vv*, Vw* команд напряжения соответствующих фаз с несущей волной (треугольной волной). После формирования ШИМ-сигналов транзисторов (T11-Т16) описанным образом, электронный блок (50) управления переключает транзисторы (T11-Т16), используя ШИМ-сигналы.
[0032] В этом варианте осуществления, поскольку электромотор (32) является трехфазным электромотором, число Ns синхронности в синхронной ШИМ устанавливается на значение, большее или равное 6 и кратное 3 (6, 9, 12 и т.д.). Под «числом Ns синхронности» понимается количество периодов несущей волны (360 градусов электрического угла), которое приходится на один период модулирующей волны команды напряжения каждой фазы. Число N синхронности устанавливается на основе скорости (Nm) вращения электромотора (32). В данном варианте осуществления несущая волна синхронизирована (достигает максимального или минимального значений) на интервалах равных интервалу перехода через ноль электрического угла, при котором любые модулирующие волны команд напряжения соответствующих фаз пересекают ось (значение равно нулю), (т.е. изменяются с положительного на отрицательное значение или наоборот), а именно, на интервалах, соответствующих 60 градусам электрического угла, таким образом, чтобы обеспечить симметричность трехфазных напряжений, подаваемых на электромотор (32). В приведенном ниже описании ширина электрического угла, равная 60 градусам, будет называться «единичный интервал», а время, требуемое электромотору (32) для поворота на 60 градусов электрического угла, будет называться «требуемое время (Т60) поворота на 60 градусов». Требуемое время (Т60) поворота на 60 градусов определяется на основе скорости (Nm) вращения электромотора (32).
[0033] Поскольку единичная составляющая несущей волны определена, как составляющая между двумя последовательными экстремальными значениями (между максимальным значением и минимальным значением и между минимальным значением и максимальным значением), число (Ne) единичных составляющих в каждом единичном интервале определяется в соответствии с уравнением (1) ниже. В уравнении (1), «2» - это коэффициент, используемый для преобразования числа (Ns) синхронности при управлении посредством синхронной ШИМ в количество единичных составляющих, приходящихся на период (360 градусов электрического угла) модулирующей волны команды напряжения каждой фазы. В уравнении (1), «60/360» - это коэффициент, используемый для преобразования числа единичных составляющих, приходящихся на один период модулирующей волны команды напряжения для каждой фазы, в число (Ne) единичных составляющих, приходящихся на единичный интервал. Здесь, значение «60» соответствует электрической угловой ширине единичного интервала, а «360» соответствует электрической угловой ширине, приходящейся на период модулирующей волны команды напряжения. В данном варианте осуществления изобретения, так как число (Ns) синхронности больше или равно 6 и кратно 3 (6, 9, 12 и т.д.), как описывалось выше, число (Ne) единичных составляющих является целым числом (2, 3, 4 и т.д.), которое больше или равно 2.

[0034] Далее описывается функционирование электрического транспортного средства (20), в соответствии с вариантом осуществления, выполненным как описано выше, в частности, функционирование с формированием несущей волны (треугольной волны). ФИГ. 2 представляет собой блок-схему, иллюстрирующую один пример процедуры формирования несущей волны, осуществляемой электронным блоком (50) управления. Данная процедура выполняется при появлении соответствующих экстремальных значений (максимальных значений и минимальных значений) несущей волны (в момент времени, когда каждая единичная составляющая от 1 до Ne в каждом единичном интервале заканчивается).
[0035] Когда выполняется процедура формирования несущей волны, электронный блок (50) управления определяет, соответствует ли момент времени, когда выполняется данный цикл процедуры, одному циклу до того момента времени, когда текущий единичный интервал закончится, что далее определяется как «конечный момент текущего единичного интервала» (шаг S100). Здесь, под «конечным моментом текущего единичного интервала» понимается конечный момент Ne-й единичной составляющей в текущем единичном интервале. Соответственно, «момент времени, в котором остается один цикл до конечного момента текущего единичного интервала» означает конечный момент (Ne-1)-й единичной составляющей в текущем единичном интервале. Если электронный блок 50 управления определяет, что момент времени, когда выполняется данный цикл процедуры, не соответствует одному циклу до конечного момента данного единичного интервала, данный цикл процедуры заканчивается.
[0036] Если электронный блок (50) управления на шаге (S100) определяет, что момент времени, когда выполняется данный цикл процедуры, соответствует одному циклу до конечного момента текущего единичного интервала, то он рассчитывает число Ne единичных составляющих в следующем единичном интервале, в соответствии с уравнением (1) выше (шаг S110). Затем электронный блок (50) управления устанавливает временные интервалы (длительности) с Тс[1] по Tc[Ne] для единичных составляющих с первой по Ne-ю в следующем единичном интервале (шаг S120) и формирует несущую волну для следующего единичного интервала на основе временных интервалов с Тс[1] по Tc[Ne] для единичных составляющих с первой по Ne-ю на шаге S120 (шаг S130). Затем данный цикл процедуры заканчивается.
[0037] На шаге S120, временные интервалы с Тс[1] по Tc[Ne] единичных составляющих с первой по Ne-ю на следующем единичном интервале устанавливаются таким образом, чтобы требуемое время (Т60) поворота на 60 градусов на следующем единичном интервале равнялось суммарному времени (Tc[1]+…+Tc[Ne]) единичных составляющих с первой по Ne-ю, и временные интервалы, по меньшей мере, двух единичных составляющих из числа временных интервалов с Тс[1] по Tc[Ne] с первой по Ne-ю единичных составляющих в следующем единичном интервале, отличались друг от друга, причем временные интервалы с Тс[1] по Tc[Ne] единичных составляющих изменяются случайным образом. Например, временные интервалы с Тс[1] по Tc[Ne] единичных составляющих с первой по Ne-ю могут быть установлены (рассчитаны) путем умножения значения (T60/Ne), полученного делением требуемого времени (Т60) поворота на 60 градусов следующего единичного интервала на число (Ne) единичных составляющих, на коэффициенты k[1], …, k[Ne], скомбинированные случайным образом, причем среднее значение данных коэффициентов k[1], …, k[Ne] равняется 1, и, по меньшей мере, два коэффициента отличны друг от друга. В этом случае, если i-й коэффициент k[i] (например, i=1) в каждом единичном интервале изменяется случайным образом, временной интервал Tc[i] i-й единичной составляющей в каждом единичном интервале может изменяться случайным образом, даже когда требуемое время (Т60) поворота на 60 градусов и число (Ne) единичных составляющих остаются постоянными на протяжении двух или более последовательных единичных интервалов.
[0038] Временной интервал (Тс) и частота (Fc) каждой единичной составляющей удовлетворяют отношению «2Tc=1/Fc», и угол наклона (Sc) каждой единичной составляющей определяется, как величина изменения значения единичной составляющей, приходящаяся на единичный электрический угол (например, 1 градус) или единичный временной интервал (например, 1μсекунда), соответствующая упомянутым временному интервалу (Тс) и частоте (Fc). Соответственно, установление временных интервалов для, по меньшей мере, двух единичных составляющих из числа временных интервалов с Тс[1] по Tc[Ne] единичных составляющих с первой по Ne-ю, отличающихся друг от друга, и изменение случайным образом временных интервалов с Тс[1] по Tc[Ne] единичных составляющих эквивалентно установке отличающихся друг от друга частот, по меньшей мере, двух единичных составляющих из числа частот с Fc[1] по Fc[Ne] единичных составляющих с первой по Ne-ю, или абсолютных значений углов наклона, по меньшей мере, двух единичных составляющих из числа абсолютных значений углов наклона с Sc[1] по Sc[Ne], а также изменению случайным образом частот с Fc[1] по Fc[Ne] или абсолютных значений углов наклона с Sc[1] по Sc[Ne] единичных составляющих. Соответственно, вместо установки временных интервалов с Тс[1] по Tc[Ne] единичных составляющих с первой по Ne-ю на следующем единичном интервале и формирования несущей волны для следующего единичного интервала, с использованием установленных временных интервалов с Тс[1] по Tc[Ne], значения частот с Fc[1] по Fc[Ne] или значения углов наклона с Sc[1] по Sc[Ne] единичных составляющих с первой по Ne-ю могут быть установлены в следующем единичном интервале, и несущая волна для следующего единичного интервала может быть сформирована с использованием установленных значений частот с Fc[1] по Fc[Ne] или значений углов наклона с Sc[1] по Sc[Ne].
[0039] Временной интервал (Тс) каждой единичной составляющей имеет взаимозависимость со своей электрической угловой шириной θew. Соответственно, установка требуемого времени (Т60) поворота на 60 градусов, равного суммарному времени (Tc[1]+…+Tc[Ne]) единичных составляющих с первой по Ne-ю, эквивалентно установке 60 градусов электрической угловой ширины равной суммарному значению электрической угловой ширины (θew[1]+…+θew[Ne]) единичных составляющих с первой по Ne-ю. Также, установка отличающихся друг от друга временных интервалов, по меньшей мере, двух единичных составляющих из числа временных интервалов с Тс[1] по Tc[Ne] единичных составляющих с первой по Ne-ю, и изменение случайным образом временных интервалов с Тс[1] по Tc[Ne] единичных составляющих эквивалентны установке отличающихся друг от друга значений электрической угловой ширины, по меньшей мере, двух единичных составляющих из числа значений электрической угловой ширины с θew[1] по θew[Ne] единичных составляющих с первой по Ne-ю, отличных друг от друга, и изменению случайным образом значений электрической угловой ширины с θew[1] по θew[Ne] единичных составляющих. Соответственно, вместо установки временных интервалов с Тс[1] по Tc[Ne] единичных составляющих с первой по Ne-ю на следующем единичном интервале и формирования несущей волны с установленными временными интервалами с Тс[1] по Tc[Ne] на следующем единичном интервале могут быть установлены значения электрической угловой ширины с θew[1] по θew[Ne] единичных составляющих с первой по Ne-ю, и несущая волна для следующего единичного интервала может быть сформирована с использованием установленных значений электрической угловой ширины с θew[1] по θew[Ne].
[0040] Формирование несущей волны может осуществляться в соответствии с процедурой формирования несущей волны, указанной на ФИГ. 2, на, по меньшей мере, одном единичном интервале с установкой временных интервалов с Тс[1] по Tc[Ne] единичных составляющих с первой по Ne-ю на постоянное значение по отношению к другим единичным интервалам.
[0041] На ФИГ. 3 показан пример формирования несущей волны. На ФИГ. 3 показан случай, когда число (Ns) синхронности является постоянным и равняется 12 (число (Ne) единичных составляющих в каждом интервале равняется 4). На ФИГ. 3, значения 0, 60 и 120 градусов электрического угла θе обозначают электрические углы при переходе через ноль соответствующих фаз, и конечные электрические углы последнего единичного интервала, текущий единичный и следующий единичный интервал, а моменты t10, t12 и t13 времени указывают соответствующие моменты времени перехода через ноль и конечные моменты времени в последнем единичном интервале, текущем единичном интервале и следующем единичном интервале. То есть, конечный электрический угол и конечный момент каждого единичного интервала устанавливаются таким образом, чтобы они совпадали с соответствующим электрическим углом перехода через ноль и моментом времени перехода через ноль, соответственно. В результате это позволяет дополнительно повысить управляемость электромотора (32). На ФИГ 3, «T60[k]» (временной интервал t10-t12) обозначает требуемое время поворота на 60 градусов в текущем единичном интервале, a «T60[k+1]» (временной интервал t12-t13) обозначает требуемое время поворота на 60 градусов в следующем единичном интервале. На ФИГ. 3, в момент 11, когда достигается конечный момент третьей единичной составляющей на текущем единичном интервале, электронный блок (50) управления устанавливает временные интервалы с Тс[1] по Тс[4] единичных составляющих с первой по четвертую на следующем единичном интервале таким образом, что трепбуемое время Т60[k+1] поворота на 60 градусов на следующем единичном интервале становится равно суммарному временному интервалу (Тс[1]+…+Тс[4]) единичных составляющих с первой по четвертую, и временной интервал, по меньшей мере, двух единичных составляющих из числа временных интервалов с Тс[1] по Тс[4] единичных составляющих с первой по четвертую на следующем единичном интервале, отличаются друг от друга, причем временные интервалы с Тс[1] по Tc[Ne] изменяются случайным образом. Затем, с помощью установленных временных интервалов с Тс[1] по Тс[4] формируется несущая волна для следующего единичного интервала. В связи с этим временные интервалы с Тс[1] по Тс[4] соответствуют частотам Fc[1]-Fc[Ne], абсолютным значениям углов наклона Sc[1]-Sc[Ne] и электрическим углам θew[1]-θew[Ne].
[0042] На ФИГ. 4 и ФИГ. 5 показаны примеры формы модулирующих волн Vu*, Vv*, Vw* команд напряжения соответствующих фаз, несущих волн и ШИМ-сигналов транзисторов T11, Т12, Т13. На ФИГ. 4 показан случай, когда число Ns синхронизации является постоянным и равняется 12 (число Ne единичных составляющих в каждом интервале равняется 4), а на ФИГ. 5 показан случай, когда число Ns синхронизации является постоянным, равным 6 (число Ne единичных составляющих в каждом интервале равняется 2). На ФИГ. 4, значения 0 градусов, 60 градусов, … электрического угла θе обозначают соответствующие электрические углы перехода через ноль и конечные углы на соответствующих единичных интервалах, а моменты времени t20, t21, … указывают на соответствующие моменты времени перехода через ноль и конечные моменты соответствующих единичных интервалов. На ФИГ. 5, значения 0 градусов, 60 градусов, … электрического угла θе указывают на электрические углы перехода через ноль и конечные углы на соответствующих единичных интервалах, а моменты времени t30, t31, … обозначают соответствующие моменты времени перехода через ноль и конечные моменты времени соответствующих единичных интервалов. То есть, на ФИГ. 4 и ФИГ. 5, конечный электрический угол и конечный момент каждого единичного интервала устанавливаются так, чтобы они совпадали с соответствующим электрическим углом перехода через ноль и соответствующим моментом времени перехода через ноль. В результате это позволяет дополнительно повысить управляемость электромотора (32).
[0043] На ФИГ. 4, несущая волна формируется таким образом, чтобы временные интервалы Тс[1] - Тс[4] (или частоты Fc[1] - Fc[4] или абсолютные значения углов наклона Sc[1] - Sc[4] или электрических углов θew[1] - θew[4]) единичных составляющих с первой по четвертую на каждом единичном интервале отличались друг от друга и изменялись случайным образом. На ФИГ. 5, несущая волна формируется таким образом, чтобы временные интервалы Тс[1], Тс[2] (или частоты Fc[1] - Fc[4] или абсолютные значения углов наклона Sc[1], Sc[2] или электрических углов θew[1], θew[2]) первой и второй единичных составляющих на каждом единичном интервале отличались друг от друга и изменялись случайным образом. Сформированная таким образом несущая волна, даже когда амплитуда и период модулирующей волны Vu*, Vv*, Vw* команды напряжения каждой фазы постоянны, ШИМ-сигналы транзисторов T11-Т16 могут изменяться случайным образом. В результате это позволяет случайным образом изменять (рассеивать) частоты, присутствующие с высокой интенсивностью в гармониках, и предотвращать выделение гармоник в заданных частотных диапазонах, тем самым уменьшая электромагнитные помехи. Дополнительно, число (Ne) единичных составляющих на каждом единичном интервале можно установить на предпочтительное значение (1/3 от числа (Ns) синхронизации электромотора). Например, если скорость (Nm) вращения электромотора (32) (или число (N) синхронизации, основанное на скорости (Nm) вращения электромотора (32)) постоянно, число (Ne) единичных составляющих может быть сделано постоянным. То есть, предусмотрена возможность уменьшения электромагнитных помех при установке числа единичных составляющих на предпочтительное значение. При уменьшении электромагнитных помех таким образом, водитель и пассажиры, а также пешеходы и т.д. вблизи транспортного средства с меньшей вероятность или полностью не будут испытывать воздействие электромагнитных помех.
[0044] В установленной на электрическом транспортном средстве (20) приводной системе согласно описанию выше несущая волна формируется таким образом, что требуемое время Т60 поворота на 60 градусов становится равным суммарному временному интервалу (Tc[1]+…+Tc[Ne]) единичных составляющих с первой по Ne-ную в каждом единичном интервале, и временные интервалы, по меньшей мере, двух единичных составляющих из числа временных интервалов с Тс[1] по Tc[Ne] единичных составляющих с первой по Ne-ную, отличны друг от друга, при том, что временные интервалы с Тс[1] по Tc[Ne] единичных составляющих изменяются случайным образом на, по меньшей мере, одном единичном интервале. В результате обеспечивается возможность уменьшения электромагнитных помех при установке числа Ne единичных составляющих на каждом единичном интервале на предпочтительное значение (1/3 от числа Ns синхронизации). При достижении приводной системой такого результата водитель и пассажиры электрического транспортного средства (20), а также пешеходы и т.д. вблизи него с меньшей вероятностью или полностью не будут ощущать воздействия электромагнитных помех. В связи с этим установка отличающихся друг от друга временных интервалов Тс, по меньшей мере, двух единичных составляющих и изменение случайным образом временных интервалов Тс эквивалентны установке, по меньшей мере, двух отличающихся друг от друга значений частоты Fc или абсолютных значений углов наклона Sc или значений электрической угловой ширины θew, и изменению случайным образом частот Fc, абсолютных значений углов наклона Sc или значений электрической угловой ширины θew.
[0045] В установленной на электрическом транспортном средстве (20) приводной системе в одном варианте осуществления изобретения, несущая волна создается таким образом, что временные интервалы Тс (или частоты Fc или абсолютные значения углов наклона Sc или значения электрической угловой ширины θew) соответствующих единичных составляющих изменяются случайным образом на, по меньшей мере, одном единичном интервале. Однако, несущая волна может формироваться таким образом, чтобы временные интервалы Тс (или частоты Fc или абсолютные значения углов наклона Sc или значения электрической угловой ширины θew) соответствующих единичных составляющих изменялись неслучайным образом. В таком случае также возможно предотвращать выделение гармоник в заданном частотном диапазоне и уменьшать электромагнитные помехи в сравнении с системой, в которой временной интервал (Тс) (или частота (F)c или абсолютное значение углов наклона Sc или значение электрической угловой ширины θew) каждой единичной составляющей неизменные или равные на каждом единичном интервале.
[0046] В установленной на электрическом транспортном средстве (20) приводной системе в данном варианте осуществления изобретения, несущая волна создается таким образом, чтобы временные интервалы Тс (или частоты Fc или абсолютные значения углов наклона Sc или значения электрической угловой ширины θew), по меньшей мере, двух единичных составляющих отличались друг от друга на, по меньшей мере, одном единичном интервале. Однако, несущая волна может формироваться таким образом, чтобы на двух последовательных единичных интервалах в составе единичных интервалов, временные интервалы Тс (или значение частоты Fc или абсолютные значения углов наклона Sc или значения электрической угловой ширины θew) единичных составляющих непосредственно до и сразу после границы двух единичных интервалов были равны друг другу. На ФИГ. 6 показан один пример формирования несущей волны в данном случае. Кроме того, когда число Ne единичных составляющих в каждом единичном интервале равняется n (n≥3), временные интервалы Тс (или значения частоты Fc, или абсолютные значения углов наклона Sc или значения электрической угловой ширины Gew) на m элементах (2≤m≤n) последовательных единичных составляющих в том же единичном интервале могут быть установлены равными друг к другу на некоторых единичных интервалах. На ФИГ. 7 показан один пример формирования несущей волны в данном случае. Автор изобретения обнаружил, что когда временной интервал (Тс) каждой единичной составляющей установлен переменным, временные интервалы (Тс) (или значения частоты Fc или абсолютные значения углов наклона Sc или значение электрической угловой ширины θew), по меньшей мере, двух последовательных единичных составляющих устанавливаются равными друг другу, что таким образом создает некоторую вероятность появления гармоник с частотой, соответствующей временному интервалу (Тс). Поэтому возможно более эффективно рассеивать гармоники, устанавливая равные друг другу временные интервалы Тс (или значения частоты Fc или абсолютные значения углов наклона Sc или значения электрической угловой ширины θew), по меньшей мере, двух последовательных единичных составляющих на двух последовательных единичных интервалах в качестве части единичных интервалов, или на некоторых единичных интервалах, при этом устанавливая отличающиеся друг от друга временные интервалы Тс (или значения частоты Fc или абсолютные значения углов наклона Sc или значения электрической угловой ширины θew), по меньшей мере, двух единичных составляющих на том же единичном интервале.
[0047] В приводной системе, установленной на электрическом транспортном средстве (20), в данном варианте осуществления конечный электрический угол и конечный момент каждого единичного интервала устанавливаются так, чтобы они совпадали с соответствующим электрическим углом перехода через ноль и соответствующим моментом перехода через ноль, как показано на ФИГ. 4 и ФИГ. 5. Однако, как показано на ФИГ. 8, конечный электрический угол и конечный момент каждого единичного интервала могут устанавливаться так, чтобы они отличались от соответствующего электрического угла перехода через ноль и соответствующего момента перехода через ноль. На ФИГ. 8 показан случай, когда число (Ns) синхронизации является постоянным, равным 12 (число Ne единичных составляющих в каждом единичном интервале равняется 4). На ФИГ. 8, значения 0 градусов, 60 градусов, … электрического угла θ и моменты времени t40, t41, … обозначают соответствующие электрические углы перехода через ноль и соответствующие моменты времени перехода через ноль, а значения 20 градусов, 80 градусов,... электрических углов θе и моменты времени t50, t51, … обозначают конечные электрические углы и конечные моменты времени соответствующих единичных интервалов. В данном случае также имеется возможность уменьшения электромагнитных помех при установке числа (Ne) единичных составляющих на каждом единичном интервале на предпочтительное значение, как описано в варианте осуществления изобретения выше.
[0048] В установленной на электрическом транспортном средстве (20) приводной системе, в данном варианте осуществления электронный блок (50) управления выполняет процедуру формирования несущей волны, представленную на ФИГ. 2, но также может выполнять процедуру формирования несущей волны, изображенную на ФИГ. 9, вместо процедуры на ФИГ. 2. Процедура формирования несущей волны на ФИГ. 9 аналогична процедуре на ФИГ. 2, за исключением добавленных шагов S200-S230. Соответственно одинаковым шагам присвоены одинаковые номера, и их подробное описание не представлено.
[0049] В процедуре формирования несущей волны согласно ФИГ. 9, если электронный блок (50) управления определяет, что момент времени, на котором выполняется данный цикл процедуры, не соответствует одному циклу до конечного момента текущего единичного интервала, то он сравнивает число Ne единичных составляющих в текущем единичном интервале с 3 (шаг S200). Если число Ne единичных компонентов в текущем единичном интервале больше или равняется 3, электронный блок (50) управления определяет, соответствует ли такой момент времени, когда выполняется данный цикл процедуры, двум циклам до конечного момента времени текущего единичного интервала (шаг S200). Здесь, под фразой «момент времени, в котором остается два цикла до конечного момента времени текущего единичного интервала» понимается конечный момент времени (Ne-2)-ной единичной составляющей в текущем единичном интервале.
[0050] Если на шаге S200 определяется, что число Ne единичных составляющих на текущем единичном интервале меньше 3 или на шаге S200 определяется, что число Ne единичных составляющих в текущем единичном интервале больше или равно 3, и на шаге S210 определяется, что момент времени, на котором выполняется цикл процедуры не соответствует двум циклам до конечного момента времени текущего единичного интервала, данный цикл процедуры заканчивается.
[0051] Если на шаге S200 определяется, что число Ne единичных составляющих на текущем единичном интервале больше или равно 3 и на шаге S210 определяется, что момент времени, на котором выполняется данный цикл процедуры, соответствует двум циклам до конечного момента текущего единичного интервала, временной интервал Тс [Ne] Ne-й единичной составляющей на текущем единичном интервале переустанавливается (шаг S220) и Ne-я единичная составляющая в текущем единичном интервале формируется заново (шаг S230). Затем, данный цикл процедуры заканчивается.
[0052] На шаге S220, когда число Ne единичных составляющих на текущем единичном интервале равно 3, разность между требуемым временем Т60 поворота на 60 градусов на текущем единичном интервале и суммой фактического временного интервала Тса[1] первой единичной составляющей и временного интервала Тс[2] второй единичной составляющей переустанавливается, как временной интервал Тс[3] третьей единичной составляющей. Когда число Ne единичных составляющих на текущем единичном интервале равно 4 или имеет большее значение, разность между требуемым временем Т60 поворота на 60 градусов и суммой фактических временных интервалов с Тса[1] по Tca[Ne-2] единичных составляющих с первой по (Ne-2)-ю и временного интервала Tc[Ne-1] единичной составляющей (Ne-1)-й переустанавливается, как временной интервал Tc[Ne] Ne-й единичной составляющей. В процессе обработки на шагах S220, S230, конечный момент текущего единичного интервала (конечный момент Ne-й единичной составляющей) может быть определена более подходящим образом. В частности, данная процедура полезна, когда требуемое время Т60 поворота на 60 градусов (скорость вращения Nm электромотора (32)) изменяется.
[0053] В установленной на электрическом транспортном средстве (20) приводной системе в этом варианте осуществления несущая волна формируется, как показано на ФИГ. 4 и ФИГ. 5, когда амплитуды модулирующих волн Vu*, Vv*, Vw* команд напряжения соответствующих фаз меньше амплитуды несущей волны (когда псевдо-трехфазное переменное напряжение подается на электромотор (32)). Однако, несущая волна может формироваться таким же образом, когда амплитуды модулирующих волн Vu*, Vv*, Vw* команд напряжения соответствующих фаз превышают амплитуду несущей волны (при подаче на электромотор (32) напряжения перемодуляции).
[0054] Хотя в качестве электромотора (32) используется трехфазный электромотор, в установленной на электрическом транспортном средстве (20) приводной системе в данном варианте осуществления, могут использоваться другие, не трехфазные электромоторы, например, шестифазные. В любом случае, каждый единичный интервал имеет заданную электрическую угловую ширину (например, ширину в 30 градусов, когда количество р фаз равно 6), которая получается делением одного периода (360 градусов электрического угла) модулирующей волны команды напряжения каждой фазы на удвоенное число р (р>2) фаз электромотора (32).
[0055] Хотя в качестве устройства накопления энергии используется батарея (36) в установленной на электрическом транспортном средстве (20) приводной системе в данном варианте осуществления изобретения вместо батареи (36) может использоваться конденсатор.
[0056] Несмотря на то, что в данном варианте осуществления между батареей (36) и инвертором (34) предусмотрен повышающий преобразователь (40), в установленной на электрическом транспортном средстве (20) приводной системе повышающий преобразователь (40) может быть не предусмотрен.
[0057] Несмотря на то, что в данном варианте осуществления система выполнена с возможностью установки на электрическое транспортное средство (20), для приводной системы требуется только наличие электромотора и инвертора, и она может настраиваться для установки на гибридном транспортном средстве или на стационарном оборудовании, например, на строительном оборудовании.
[0058] Соответствующие взаимосвязи между основными элементами вариантов осуществления изобретения и основных элементов изобретения описываются в разделе СУЩНОСТЬ ИЗОБРЕТЕНИЯ. В данном варианте осуществления, электромотор (32) является примером «электромотора», инвертор (34) является примером «инвертора», а электронный блок (50) является примером «электронного блока управления».
[0059] Соответствующие взаимосвязи между основными элементами вариантов осуществления изобретения и основными элементами изобретения, раскрытого в разделе СУЩНОСТЬ ИЗОБРЕТЕНИЯ, не имеют ограничительного характера для элементов изобретения, раскрытых в разделе СУЩНОСТЬ ИЗОБРЕТЕНИЯ, так как вариант осуществления изобретения является примером, служащим для объяснения отдельных форм или конфигураций изобретения, описанных в разделе СУЩНОСТЬ ИЗОБРЕТЕНИЯ. То есть, изобретение, раскрытое в разделе СУЩНОСТЬ ИЗОБРЕТЕНИЯ, следует интерпретировать на основе приведенного здесь описания, и варианты осуществления изобретения являются только конкретными примерами изобретения, раскрытого в разделе СУЩНОСТЬ ИЗОБРЕТЕНИЯ.
[0060] Хотя форма или конфигурация для осуществления изобретения были описаны с помощью варианта осуществления изобретения, оно никоим образом не ограничивается продемонстрированным вариантом осуществления, однако может быть осуществлено в различных формах, не выходя за пределы объема защиты.
[0061] Изобретение может применяться в промышленности, например, при производстве приводных систем и автомобилей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2659372C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ПРИВОДНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2016 |
|
RU2654250C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОМОТОРОМ | 2020 |
|
RU2730301C1 |
| ПРИВОДНАЯ СИСТЕМА ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2534465C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2017 |
|
RU2677217C1 |
| УСТРОЙСТВО И СПОСОБ РЕГУЛИРОВАНИЯ СИСТЕМЫ ПРИВОДА ОТ ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2391767C2 |
| КОНТРОЛЛЕР ВРАЩАЮЩЕЙСЯ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2008 |
|
RU2431916C1 |
| ПРИВОДНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2530207C2 |
| Инвертор транспортного исполнения | 2022 |
|
RU2788306C1 |
| СПОСОБ ПРОТИВОДЕЙСТВИЯ РАДИОЭЛЕКТРОННЫМ СИСТЕМАМ УПРАВЛЕНИЯ | 2012 |
|
RU2483341C1 |




Группа изобретений относится к электрическим тяговым системам транспортных средств. Приводная система содержит многофазный электромотор, инвертор и электронный блок управления. Электронный блок управления выполнен с возможностью формирования несущей волны таким образом, чтобы выполнялись условия: i) на каждом из единичных интервалов требуемое время на указанном единичном интервале равняется суммарному времени множества единичных составляющих, и ii) по меньшей мере на одном из указанных единичных интервалов длительности по меньшей мере двух единичных составляющих из множества единичных составляющих отличны друг от друга. При этом электронный блок управления выполнен с возможностью формирования несущей волны таким образом, чтобы на части единичных интервалов, на каждом из которых число единичных составляющих равно первому числу, длительности последовательных единичных составляющих, число которых равно второму числу, на этом же единичном интервале были равны друг другу, при этом второе число меньше первого числа. Также заявлены варианты приводной системы, автомобиль, на который установлена указанная приводная система, и способ управления приводной системой. Технический результат заключается в уменьшении электромагнитных помех, предотвращая выделение гармоник в заданном частотном диапазоне. 7 н. и 5 з.п. ф-лы, 9 ил.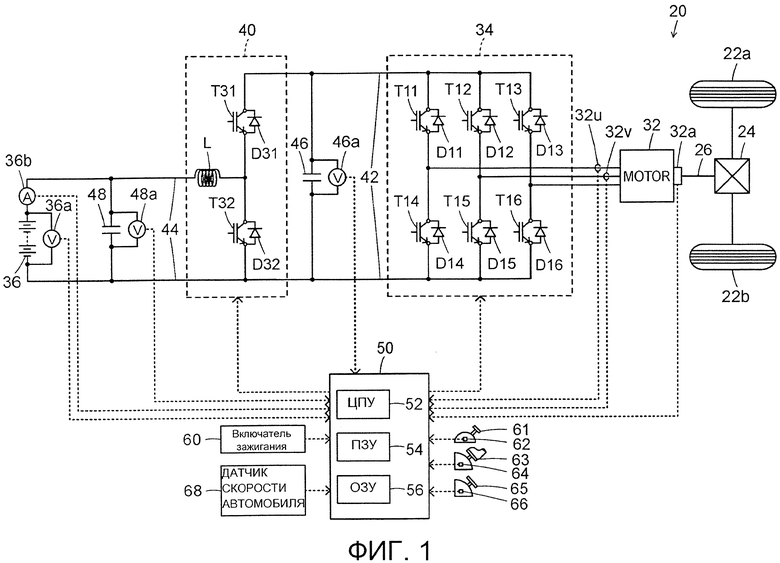
1. Приводная система, содержащая:
многофазный электромотор;
инвертор, включающий в себя множество переключающих устройств и выполненный с возможностью приведения в движение электромотора посредством переключения упомянутых переключающих устройств; и
электронный блок управления, выполненный с возможностью управления посредством широтно-импульсной модуляции, причем широтно-импульсная модуляция является процессом управления, при котором формируют широтно-импульсно модулированные сигналы от множества упомянутых переключающих устройств путем сравнения модулирующей волны команды напряжения каждой фазы, основанной на команде крутящего момента электромотора, с несущей волной, и выполняют переключение множества упомянутых переключающих устройств,
электронный блок управления, выполненный с возможностью формирования несущей волны таким образом, чтобы выполнялись условия i) и ii), как указано ниже, причем единичная составляющая является сегментом несущей волны между двумя последовательными экстремальными значениями, а единичный интервал является интервалом заданной электрической угловой ширины, полученной путем деления одного периода модулирующей волны команды напряжения на удвоенное число фаз электромотора, при этом несущая волна распространяется через множество единичных составляющих,
i) на каждом из единичных интервалов требуемое время на указанном единичном интервале равняется суммарному времени множества единичных составляющих, и
ii) по меньшей мере на одном из указанных единичных интервалов длительности по меньшей мере двух единичных составляющих из множества единичных составляющих отличны друг от друга;
при этом электронный блок управления выполнен с возможностью формирования несущей волны таким образом, чтобы по меньшей мере на части единичных интервалов, на каждом из которых число единичных составляющих равно первому заранее заданному числу, длительности для второго заранее заданного числа последовательных единичных составляющих из единичных составляющих на этом же единичном интервале были равны друг другу, при этом первое заранее заданное число больше или равно 3, а второе заранее заданное число больше или равно 2 и меньше первого заранее заданного числа.
2. Приводная система по п. 1, в которой
электронный блок управления выполнен с возможностью формирования несущей волны таким образом, что длительность упомянутой единичной составляющей изменяется случайным образом.
3. Приводная система по п. 1 или 2, в которой
электронный блок управления выполнен с возможностью формирования несущей волны таким образом, чтобы число упомянутых единичных составляющих являлось постоянным на двух последовательных единичных интервалах из множества единичных интервалов.
4. Приводная система по п. 1, в которой
электронный блок управления выполнен с возможностью формирования несущей волны таким образом, чтобы на двух последовательных единичных интервалах из множества единичных интервалов длительности упомянутых единичных составляющих непосредственно до и сразу после границы двух последовательных единичных интервалов были равны друг другу.
5. Приводная система по п. 1 или 2, в которой
электронный блок управления выполнен с возможностью формирования несущей волны таким образом, чтобы каждый момент времени перехода через ноль, при котором модулирующая волна команды напряжения любой из фаз пересекает ноль на оси, совпадал с конечным моментом времени каждого единичного интервала.
6. Приводная система по п. 1 или 2, в которой
число фаз электромотора равно 3, и требуемым временем на единичном интервале является период времени, требуемый для поворота электромотора на 60 градусов электрического угла.
7. Приводная система, содержащая:
многофазный электромотор;
инвертор, включающий в себя множество переключающих устройств и выполненный с возможностью приведения в движение электромотора посредством переключения упомянутых переключающих устройств; и
электронный блок управления, выполненный с возможностью управления посредством широтно-импульсной модуляции, причем широтно-импульсная модуляция является процессом управления, при котором формируют широтно-импульсно модулированные сигналы от множества упомянутых переключающих устройств путем сравнения модулирующей волны команды напряжения каждой фазы, основанной на команде крутящего момента электромотора, с несущей волной, и выполняют переключение множества упомянутых переключающих устройств,
электронный блок управления, выполненный с возможностью формирования несущей волны таким образом, чтобы выполнялись условия i) и ii), как указано ниже, причем единичная составляющая является сегментом несущей волны между двумя последовательными экстремальными значениями, а единичный интервал является интервалом заданной электрической угловой ширины, полученным путем деления одного периода модулирующей волны команды напряжения на удвоенное число фаз электромотора, при этом несущая волна распространяется через множество единичных составляющих,
i) на каждом единичном интервале требуемое время на указанном единичном интервале равняется суммарному времени множества единичных составляющих, и
ii) по меньшей мере на одном из указанных единичных интервалов частоты по меньшей мере двух единичных составляющих из множества единичных составляющих отличны друг от друга,
при этом электронный блок управления выполнен с возможностью формирования несущей волны таким образом, чтобы по меньшей мере на части единичных интервалов, на каждом из которых число единичных составляющих равно первому заранее заданному числу, длительности для второго заранее заданного числа последовательных единичных составляющих из единичных составляющих на этом же единичном интервале были равны друг другу, при этом первое заранее заданное число больше или равно 3, а второе заранее заданное число больше или равно 2 и меньше первого заранее заданного числа.
8. Приводная система, содержащая:
многофазный электромотор;
инвертор, включающий в себя множество переключающих устройств и выполненный с возможностью приведения в движение электромотора посредством переключения упомянутых переключающих устройств; и
электронный блок управления, выполненный с возможностью управления посредством широтно-импульсной модуляции, причем широтно-импульсная модуляция является процессом управления, при котором формируют широтно-импульсно модулированные сигналы от множества упомянутых переключающих устройств путем сравнения модулирующей волны команды напряжения каждой фазы, основанной на команде крутящего момента электромотора, с несущей волной, и выполняют переключение множества упомянутых переключающих устройств,
электронный блок управления, выполненный с возможностью формирования несущей волны таким образом, чтобы выполнялись условия i) и ii), как указано ниже, причем единичная составляющая является сегментом несущей волны между двумя последовательными экстремальными значениями, а единичный интервал является интервалом заданной электрической угловой ширины, полученной путем деления одного периода модулирующей волны команды напряжения на удвоенное число фаз электромотора, при этом несущая волна распространяется через множество единичных составляющих,
i) на каждом единичном интервале требуемое время на указанном единичном интервале равняется суммарному времени множества единичных составляющих, и
ii) по меньшей мере на одном из указанных единичных интервалов абсолютные значения углов наклона по меньшей мере двух единичных составляющих из множества единичных составляющих отличны друг от друга,
при этом электронный блок управления выполнен с возможностью формирования несущей волны таким образом, чтобы по меньшей мере на части единичных интервалов, на каждом из которых число единичных составляющих равно первому заранее заданному числу, длительности для второго заранее заданного числа последовательных единичных составляющих из единичных составляющих на этом же единичном интервале были равны друг другу, при этом первое заранее заданное число больше или равно 3, а второе заранее заданное число больше или равно 2 и меньше первого заранее заданного числа.
9. Приводная система, содержащая:
многофазный электромотор;
инвертор, включающий в себя множество переключающих устройств и выполненный с возможностью приведения в движение электромотора посредством переключения упомянутых переключающих устройств; и
электронный блок управления, выполненный с возможностью управления посредством широтно-импульсной модуляции, причем широтно-импульсная модуляция является процессом управления, при котором формируют широтно-импульсно модулированные сигналы от множества упомянутых переключающих устройств путем сравнения модулирующей волны команды напряжения каждой фазы, основанной на команде крутящего момента электромотора, с несущей волной, и выполняют переключение множества упомянутых переключающих устройств,
электронный блок управления, выполненный с возможностью формирования несущей волны таким образом, чтобы выполнялись условия i) и ii), как указано ниже, причем единичная составляющая является сегментом несущей волны между двумя последовательными экстремальными значениями, а единичный интервал является интервалом заданной электрической угловой ширины, полученной путем деления одного периода модулирующей волны команды напряжения на удвоенное число фаз электромотора, при этом несущая волна распространяется через множество единичных составляющих,
i) на каждом единичном интервале требуемое время на единичном интервале равняется суммарному времени множества единичных составляющих, и
ii) по меньшей мере на одном из указанных единичных интервалов значения электрической угловой ширины по меньшей мере двух единичных составляющих из множества единичных составляющих отличны друг от друга,
при этом электронный блок управления выполнен с возможностью формирования несущей волны таким образом, чтобы по меньшей мере на части единичных интервалов, на каждом из которых число единичных составляющих равно первому заранее заданному числу, длительности для второго заранее заданного числа последовательных единичных составляющих из единичных составляющих на этом же единичном интервале были равны друг другу, при этом первое заранее заданное число больше или равно 3, а второе заранее заданное число больше или равно 2 и меньше первого заранее заданного числа.
10. Автомобиль, на котором установлена приводная система по п. 1, причем упомянутый автомобиль выполнен с возможностью перемещения с использованием создаваемой приводом мощности.
11. Автомобиль, на котором установлена приводная система по любому из пп. 7-9, причем упомянутый автомобиль выполнен с возможностью перемещения с использованием создаваемой приводом мощности.
12. Способ управления приводной системой, где
приводная система включает в себя многофазный электромотор, инвертор, содержащий множество переключающих устройств и выполненный с возможностью приводить в движение электромотор посредством переключения упомянутых переключающих устройств, и электронный блок управления, выполненный с возможностью управления посредством широтно-импульсной модуляции, причем широтно-импульсная модуляция является процессом управления, при котором формируют широтно-импульсно модулированные сигналы от множества упомянутых переключающих устройств путем сравнения модулирующей волны команды напряжения каждой фазы, основанной на команде крутящего момента электромотора с несущей волной, и выполняют переключение множества упомянутых переключающих устройств,
указанный способ, содержащий:
формирование электронным блоком управления несущей волны таким образом, чтобы выполнялись условия i) и ii), как указано ниже, причем единичная составляющая является сегментом несущей волны между двумя последовательными экстремальными значениями, а единичный интервал является интервалом заданной электрической угловой ширины, полученной путем деления одного периода модулирующей волны команды напряжения на удвоенное число фаз электромотора, при этом несущая волна распространяется через множество единичных составляющих,
i) на каждом единичном интервале требуемое время на единичном интервале равняется суммарному времени множества единичных составляющих, и
ii) по меньшей мере на одном из единичных интервалов длительности по меньшей мере двух единичных составляющих из множества единичных составляющих отличны друг от друга,
при этом электронный блок управления выполнен с возможностью формирования несущей волны таким образом, чтобы по меньшей мере на части единичных интервалов, на каждом из которых число единичных составляющих равно первому заранее заданному числу, длительности для второго заранее заданного числа последовательных единичных составляющих из единичных составляющих на этом же единичном интервале были равны друг другу, при этом первое заранее заданное число больше или равно 3, а второе заранее заданное число больше или равно 2 и меньше первого заранее заданного числа.
| US 8269439 B2, 18.09.2012 | |||
| СПОСОБ УПРАВЛЕНИЯ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | 2011 |
|
RU2482595C1 |
| JP 2016005370 A, 12.01.2016 | |||
| Способ потенциометрического определения хлорид-ионов | 1980 |
|
SU947026A1 |
| Устройство для управления инвертором с широтно-импульсной модуляцией | 1983 |
|
SU1201997A1 |
| СПОСОБ УПРАВЛЕНИЯ ИНВЕРТОРОМ НАПРЯЖЕНИЯ С ШИРОТНО-ИМПУЛЬСНОЙ МОДУЛЯЦИЕЙ В СОСТАВЕ СИСТЕМЫ ГЕНЕРИРОВАНИЯ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ПЕРЕМЕННОГО ТОКА | 2011 |
|
RU2517298C2 |

