Изобретение относится к области электропитания радиоэлектронного оборудования и может быть использовано с целью подзарядки аккумуляторных батарей в элементах беспроводных сенсорных сетей (БСС).
Управление электропитанием элементов БСС имеет первостепенное значение для пространственно удаленных узлов сети. Эти узлы обычно питаются от автономных источников электроэнергии, нуждающихся в периодической подзарядке [1, 2] или замене – в зависимости от назначения, специфики построения и условий работы БСС [3]. Из уровня техники известен ряд способов решения данной проблемы. При отсутствии у персонала свободного доступа к элементам БСС замена источников электропитания может осуществляться специализированными роботами [4, 5, 6]. В наиболее распространенных сенсорных узлах: таких как Mica, Telos, Iris и др. [4], основным источником электропитания является аккумуляторная батарея, нуждающаяся в периодической подзарядке. Перспективной технологией подзарядки аккумуляторных батарей, позволяющей значительно увеличить срок службы элементов БСС, в настоящее время является беспроводная передача электроэнергии [7] с использованием различного рода мобильных устройств [9]. Передача электроэнергии при этом осуществляется путем индукционного электромагнитного воздействия зарядного устройства на перезаряжаемые аккумуляторные батареи узлов БСС.
Наиболее близким по технической сущности является способ [8] подзарядки аккумуляторных батарей в сенсорных сетях при помощи мобильной зарядной машины WCV (прототип предлагаемого изобретения). Машина WCV периодически объезжает и подзаряжает батареи в элементах узлов БСС, развернутых вблизи земной поверхности, в стационарных условиях. Электроэнергия переносится в узлы при помощи технологии на основе магнитного резонанса, известной как Witricity [10].
В рассматриваемой области применения у способа-прототипа имеются следующие недостатки:
– зарядные устройства, реализующие известный способ, с учетом их массогабаритных показателей, не могут быть доставлены машиной WCV на участки сильнопересеченной местности и на крыши зданий, внутрь огражденных территорий, к берегам водоемов и т.п.;
– поскольку расстояние эффективного электромагнитное воздействия не превышает λ/2π, где λ – длина волны, на которой оно осуществляется, на частотах выше 10 МГц зарядное устройство должно быть удалено от элементов БСС на расстояние не более 4,7 м, что не всегда возможно по тем же причинам;
– реализация зарядного устройства на частотах ниже 10 МГц, где расстояние воздействия может быть увеличено, или, при том же расстоянии, сокращено время подзарядки аккумуляторных батарей, встречает трудности ввиду имеющихся ограничений по массогабаритным показателям оборудования с учетом транспортных возможностей WCV.
Предлагаемое решение проблемы состоит в том, чтобы использовать вместо WCV транспортное средство, способное сблизить зарядное устройство и элементы БСС до минимально возможного расстояния между ними, как это имеет место, например, в беспроводных устройствах подзарядки аккумуляторов в сотовых терминалах [11]. Таким транспортным средством является малогабаритный управляемый беспилотный летательный аппарат (БПЛА), осуществляющий доставку зарядного устройства к узлам БСС с точностью, заданной средствами ручного операторского, автоматизированного и др. позиционирования БПЛА.
Техническим результатом предлагаемого изобретения является возможность беспроводной электромагнитной передачи энергии от зарядного устройства к элементам БСС на частотах выше 10 МГц при расстояниях до 4,7 м, что ведет к росту энергетической эффективности и сокращению времени подзарядки их аккумуляторных батарей.
Сущность предлагаемого способа подзарядки аккумуляторов в беспроводной сенсорной сети, включающий доставку транспортным средством зарядного устройства к месту расположения элементов беспроводной сенсорной сети и электромагнитное воздействие на элементы беспроводной сенсорной сети для подзарядки аккумуляторных батарей, используемых для их электропитания, состоит в том, что в качестве транспортного средства доставки используется управляемый беспилотный летательный аппарат, на котором размещается устройство, осуществляющее электромагнитное воздействие на элементы беспроводной сенсорной сети с целью подзарядки аккумуляторных батарей, используемых для их электропитания.
Фиг. 1 демонстрирует принцип реализации способа-прототипа подзарядки аккумуляторных батарей в БСС при помощи мобильной зарядной машины WCV, где фигурируют базовая станция и сенсорные узлы в составе БСС, а также станция обслуживания автомобилей, осуществляющая маршрутизацию, заправку и оперативное управление WCV.
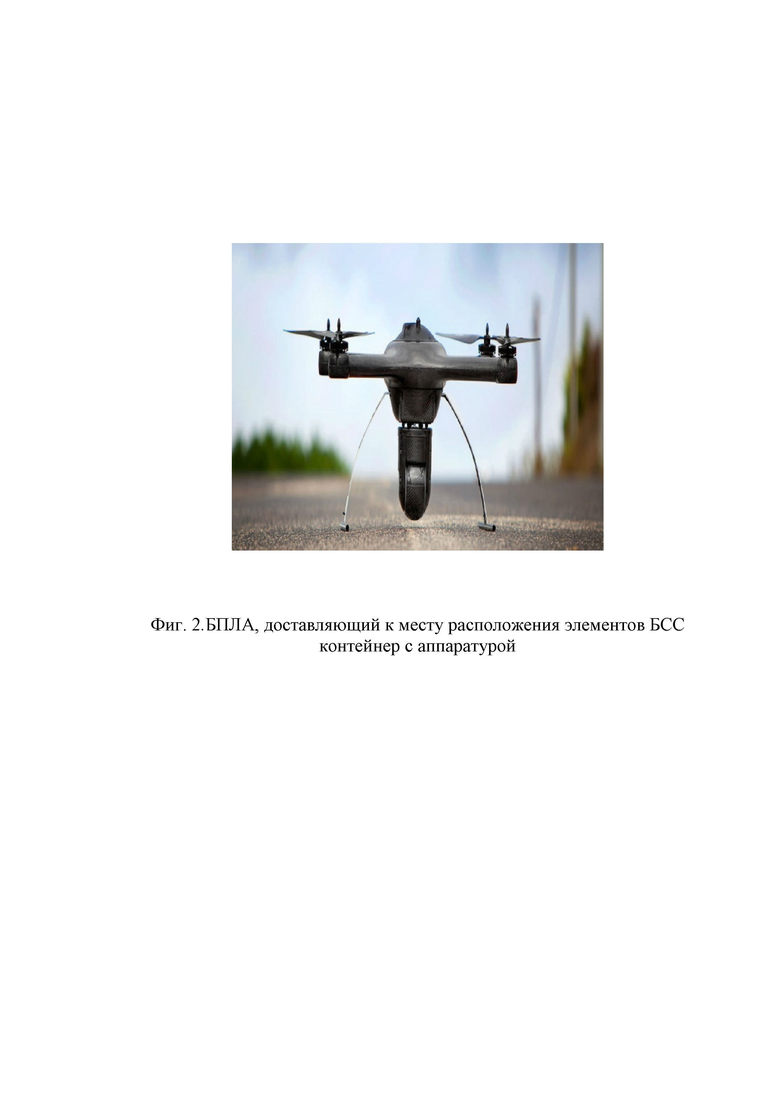
Фиг. 2 иллюстрирует вариант реализации предлагаемого способа при помощи БПЛА, доставляющего к месту расположения элементов БСС контейнер с аппаратурой, которая осуществляет электромагнитное воздействие на элементы БСС с целью подзарядки их аккумуляторных батарей.
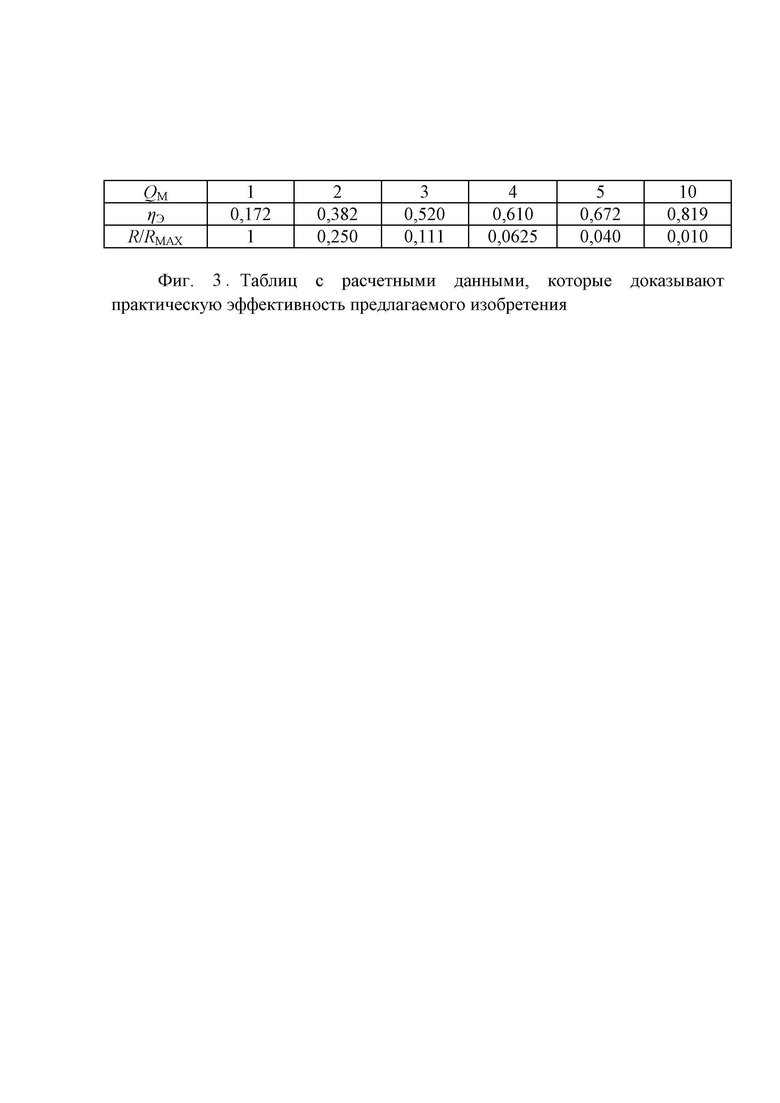
Фиг. 3 содержит таблицу с расчетными данными, которые доказывают практическую эффективность предлагаемого изобретения.
Известный способ-прототип осуществляется следующим образом.
Мобильная зарядная машины WCV (см. Фиг. 1), работающая в режиме либо ручного управления оператором, либо автоматизированного управления компьютерной системой, по заданной программе периодически объезжает узлы БСС, развернутые вблизи земной поверхности, которые при работе в стационарных условиях неподвижны (имеют фиксированные пространственные координаты). Исходный заряд WCV осуществляется на станции обслуживания автомобилей, где находятся также компьютерная система управления, определяющая маршрут, периодичность и продолжительность всех операций, связанных с зарядкой аккумуляторных батарей элементов БСС.
Способами беспроводной передачи электроэнергии от зарядной машины в узлы БСС могут быть технологии на основе радиочастотного резонанса и магнитного резонанса Witricity, при помощи лазера, а также другими методами и средствами электромагнитного воздействия, которые известны из уровня техники. Достоинствами беспроводных способов являются их мобильность и возможность обслуживания широко разветвленной системы элементов БСС. Главной проблемой является необходимость сближения машины WCV и каждого из элементов БСС на минимально-возможные расстояния, при которых эффективность подзарядки аккумуляторных батарей максимальна.
Другие недостатки способа-прототипа обусловлены тем, что зарядное устройство не может быть доставлено машиной WCV на участки сильнопересеченной местности и на крыши зданий, внутрь огражденных территорий, к берегам водоемов и т.п.; на расстояниях электромагнитного воздействия, превышающих λ/2π, где эффективность зарядки одной батареи невелика, для нее может потребоваться время, не соответствующее циклу зарядки всех элементов БСС одной машиной WCV, и понадобятся дополнительные машины; на частотах ниже 10 МГц, где расстояние воздействия может быть увеличено, или, при том же расстоянии, сокращено время подзарядки батарей, возникают трудности ввиду ограничений по массогабаритным показателям оборудования с учетом транспортных возможностей машины WCV.
С целью устранения указанных недостатков в предлагаемом изобретении предлагается вместо машины WCV использовать управляемый БПЛА, осуществляющий доставку зарядного устройства к узлам БСС с точностью, заданной средствами ручного операторского, автоматизированного и др. позиционирования БПЛА, известными из уровня техники.
Предлагаемый способ осуществляется следующим образом.
Расположение БПЛА с контейнером, где размещается зарядное устройство, после приземления вблизи элемента БСС, на аккумуляторные батареи которого осуществляется беспроводное воздействие с целью их подзарядки, иллюстрирует Фиг. 2. В рамках технологии Witricity система подзарядки включает воздушный трансформатор, первичная обмотка c индуктивностью L1 которого, совместно с питающим ее генератором, располагается в контейнере БПЛА, а вторичная обмотка c индуктивностью L2 входит в схему элемента БСС и подключена к его аккумуляторной батарее. После приземления БПЛА посредством сенсорных устройств катушки L1 и L2 приводятся во взаимодействие, и через полученный таким образом трансформатор осуществляется передача электромагнитной энергии от зарядного устройства БПЛА к элементу БСС. Посадка БПЛА может быть осуществлена либо при визуальном ручном управлении, либо автоматически – в последнем случае на БПЛА размещается миниатюрная видеокамера, а на сенсорном устройстве – источник инфракрасного излучения. По завершении обслуживания заданного числа элементов БСС, согласно заданной программе его функционирования, БПЛА возвращается на базу для подзарядки своего зарядного устройства и т.д.
Математическая модель наблюдаемых явлений и процессов выглядит следующим образом. На рабочей резонансной частоте, при оптимальном согласовании контуров входной и выходной части системы зарядки Q1 и Q2 с их нагрузками, эффективная добротность схемы зарядного устройства в целом QМ представляет собой 

Таблица Фиг. 3 содержит расчетные данные, демонстрируют эффективность предлагаемого способа на примере случая k(R) ~ 1/R2. За условную точку отсчета принято расстояние RMAX, соответствующее QМ = 1. Предлагаемый способ универсален и прост, он удобен для реализации и позволяет повысить эффективность функционирования БСС в условиях реализации перспективных инновационных проектов [12].
ЛИТЕРАТУРА
1. B. Scrosati, R.J. Neat. Lithium polymer batteries, in: Applications of Electroactive Polymers, Springer, 1993, pp. 182-222.
2. Nickel metal hydride battery. URL: http://www.batteryspace.com/nimhpacks24-48v.aspx.
3. B. Tong, G. Wang, W. Zhang, C. Wang. Node reclamation and replacement for long-lived sensor networks, in: Sensor, Mesh and Ad Hoc Communications and Networks, 2009. SECON’09. 6th Annual IEEE Communications Society Conference on, IEEE, 2009, pp. 1-9.
4. Memsic wireless modules. URL: http://www.memsic.com/products/wireless-sensor-networks/wireless-modules.html.
5. J. Sheu, P. Cheng, K. Hsieh. Design and implementation of a smart mobile robot, in: Wireless And Mobile Computing, Networking And Communications, 2005.(WiMob’2005), IEEE International Conference on, Vol. 3, IEEE, 2005, pp. 422-429.
6. A. LaMarca, W. Brunette, D. Koizumi, M. Lease, S. Sigurdsson, K. Sikorski, D. Fox, G. Borriello. Making sensor networks practical with robots, Pervasive Computing (2002) рр. 615-622.
7. R. Doost, K. Chowdhury, M. Di Felice. Routing and link layer protocol design for sensor networks with wireless energy transfer, in: GLOBECOM 2010, 2010 IEEE Global Telecommunications Conference, IEEE, 2010, pp. 1-5.
8. L. Xie, Y. Shi, Y. T. Hou, H. D. Sherali. Making sensor networks immortal: An energy-renewal approach with wireless power transfer, IEEE/ACM Transactions on Networking (TON) 20 (6) (2012) рр. 1748-1761.
9. Powercast corporation, p2000 series 902 928 mhz powerharvester development kit. URL: http://www.powercastco.com/products/development-kits/.
10. Witricity. URL: http://www.witricity.com/.
11. Беспроводное зарядное устройство на телефон. Mobile Comp. planshetniypc.ru/besprovodnaya-zaryadka-telefonov.html.
12. Интернет вещей. Под ред. А.В. Рослякова. Самара: Изд. ПГУТИ, 2014, 342 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство электропитания узлового элемента беспроводной сенсорной сети | 2020 |
|
RU2793177C1 |
| Устройство подзарядки аккумуляторов узловых элементов беспроводной сенсорной сети | 2023 |
|
RU2817523C1 |
| Устройство подзарядки аккумуляторных элементов беспроводной сенсорной сети | 2024 |
|
RU2826802C1 |
| Способ обслуживания сенсорных узлов беспроводных сенсорных сетей | 2021 |
|
RU2790652C1 |
| Устройство захвата и удержания сенсорных элементов | 2023 |
|
RU2805429C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ БЕСПРОВОДНОЙ СЕНСОРНОЙ СЕТИ | 2013 |
|
RU2556423C2 |
| Способ, комплекс обработки информации об отказах устройств беспроводных сенсорных сетей передачи данных и связанных сетей | 2021 |
|
RU2801825C2 |
| АВТОНОМНОЕ ПЕРЕНОСНОЕ УСТРОЙСТВО ИНДУКТИВНОЙ ЗАРЯДКИ АККУМУЛЯТОРНОЙ БАТАРЕИ | 2018 |
|
RU2695103C1 |
| СИСТЕМА ДОСТАВКИ ГРУЗА | 2018 |
|
RU2689643C1 |
| АВТОМАТИЧЕСКИЙ КОМПЛЕКС ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЭЛЕКТРОСЕТЕВОГО ОБОРУДОВАНИЯ | 2017 |
|
RU2674550C1 |

Изобретение относится к области электротехники, в частности к электропитанию радиоэлектронного оборудования, и может быть использовано с целью подзарядки аккумуляторных батарей в элементах беспроводных сенсорных сетей (БСС). Технический результат – повышение энергетической эффективности и сокращение времени подзарядки аккумуляторных батарей в элементах БСС за счет максимального сближения зарядного устройства и элементов БСС. Согласно способу подзарядки аккумуляторов в беспроводной сенсорной сети доставляют транспортным средством зарядное устройство к месту расположения элементов беспроводной сенсорной сети и осуществляют электромагнитное воздействие на элементы беспроводной сенсорной сети для подзарядки аккумуляторных батарей, используемых для их электропитания, в качестве транспортного средства доставки используется управляемый беспилотный летательный аппарат, на котором размещается устройство, осуществляющее электромагнитное воздействие на элементы беспроводной сенсорной сети с целью подзарядки аккумуляторных батарей, используемых для их электропитания. 3 ил.
Способ подзарядки аккумуляторов в беспроводной сенсорной сети, включающий доставку транспортным средством зарядного устройства к месту расположения элементов беспроводной сенсорной сети и электромагнитное воздействие на элементы беспроводной сенсорной сети для подзарядки аккумуляторных батарей, используемых для их электропитания, отличающийся тем, что для доставки устройства, осуществляющего электромагнитное воздействие на элементы беспроводной сенсорной сети с целью подзарядки аккумуляторных батарей, используемых для их электропитания, на расстояние, при котором энергетическая эффективность подзарядки аккумуляторных батарей является максимальной, в качестве транспортного средства используется управляемый беспилотный летательный аппарат, на котором размещается зарядное устройство.
| "Making Sensor Networks Immortal: An Energy-Renewal Approach with Wireless Power Transfer", L | |||
| Xie, Y | |||
| Shi, Y | |||
| T | |||
| Hou, H | |||
| D | |||
| Sherali, IEEE/ACM Transactions on Networking (TON) 20 (6) (2012) | |||
| Способ доставки постановщиков помех и беспилотный робототехнический комплекс радиоэлектронной борьбы | 2016 |
|
RU2625206C1 |
| US 9387928 B1, 12.07.2016 | |||
| US 9534905 B1, 03.01.2017. | |||

