Изобретение относится к области беспроводных сенсорных сетей (БСС), и может быть использовано с целью обеспечения перемещения указанных сенсорных элементов (СЭ) с помощью беспилотных летательных аппаратов (БПЛА).
Размещение СЭ в окружающей среде является сложной задачей. СЭ могут использоваться в различных целях, таких как отбор проб и измерение состава воздуха, измерение структурной целостности искусственных сооружений, сбор визуальных данных, оценка данных о дорожном движении или обнаружение популяций диких животных в окружающей среде. Размещение этих датчиков традиционно осуществляется лично. Этот метод связан с рядом ограничений, в частности, необходимостью размещения СЭ в труднодоступных местах. Поэтому имеется ряд попыток размещения и тестирования СЭ с помощью автоматизированных БПЛА. Обеспечение надежного круглосуточного электропитания также имеет важное значение для эффективной работы БСС. Надежное электропитание СЭ часто обеспечивается путем их перемещения с помощью БПЛА в места подзарядки аккумуляторных батарей [1]. Из уровня техники известен также ряд других способов применения БПЛА с целью транспортировки грузов [2].
Наиболее близким по технической сущности является устройство транспортировки грузов с помощью БПЛА [3].
Предлагаемое решение проблемы состоит в том, чтобы осуществить высвобождение сенсорного элемента за счет силы давления сжатого газа, поступающего в емкость, размеры которой изменяются под воздействием давления.
Техническим результатом предлагаемого изобретения является возможность транспортировки СЭ с помощью БПЛА, при использовании в качестве средств удержания постоянных магнитов, без затрат электроэнергии на питание электромагнитов.
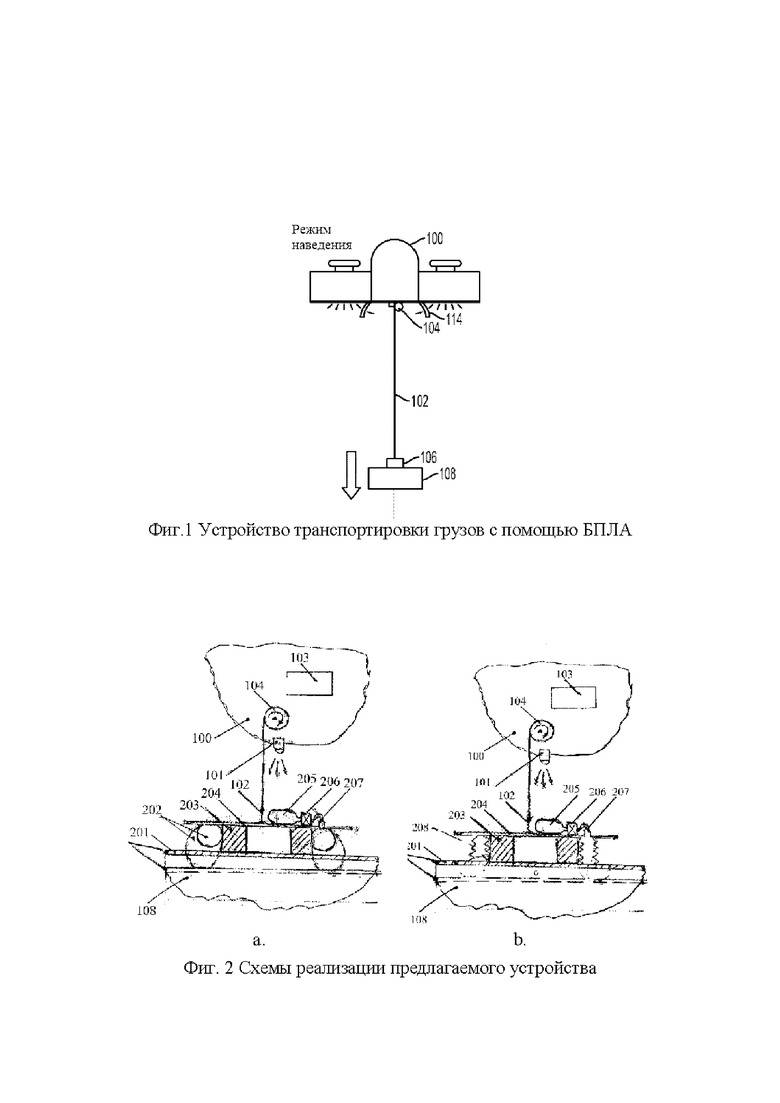
Известный прототип может перемещать СЭ, с помощью БПЛА, в соответствии со схемой, представленной на Фиг.1.
Здесь СЭ рассматривается в качестве полезного груза 108, а устройство 106 является устройством захвата и высвобождения полезного груза.
Транспортировка груза 108 осуществляется с помощью БПЛА 100 и удерживается с помощью устройства 106 высвобождения и захвата груза, соединённого с подъемным механизмом 104 посредством троса 102. После освобождения груза 108, устройство захвата перемещается вовнутрь БПЛА 100, и крышки 114 люка закрываются.
Устройства 106 высвобождения и захвата нагрузки могут включать в себя одну или несколько магнитных функций, которые могут быть активированы/деактивированы в ответ на введенный сигнал, например, постоянные магниты, парамагнитные материалы. Полезный груз 108 может также включать в себя магнитные элементы и может быть закреплен к устройству 106 посредством сил магнитного притяжения между такими магнитными элементами, а затем полезный груз 108 может быть высвобожден путем деактивации магнитных элементов или преодоления силы притяжения.
В рассматриваемом прототипе не указаны средства преодоления силы притяжения магнита при высвобождении полезного груза и возможности реализации указанного устройства применительно к СЭ.
Предлагаемое устройство захвата и удержания СЭ функционирует следующим образом.
На Фиг. 2a и 2b показаны схемы реализации устройств захвата и удержания сенсорных элементов при их транспортировке с помощью БПЛА. СЭ 108, представляющий полезный груз, перемещается к месту назначения с помощью БПЛА 100, на котором имеются радиоприемопередатчик, контроллер управления, блок электропитания и средства спутниковой ориентации (103), а также средства видеонаблюдения 101. СЭ 108 может перемещаться относительно БПЛА с помощью лебедки 104 и троса 102. Верхняя плоскость 201 СЭ выполняется из ферромагнитного материала и удерживается постоянным магнитом 203 (например, кольцевой формы). Предлагаемый способ предусматривает наличие источника сжатого газа 205, электроуправляемого клапана 206 с соединительным шлангом 207 (или без шланга). При необходимости освобождения СЭ по сигналу от контроллера открывается клапан 206 и сжатый газ из источника сжатого газа 205 поступает в рабочую емкость, изменяющую свои размеры. Рабочая емкость 202, представленная на Фиг 2a (для примера), имеет тороидальную форму и выполнена из эластичного материала (например, резина). Рабочая емкость 208, представленная на Фиг 2b (для примера), имеет кольцевую форму и выполнена в виде сильфона. При поступлении вовнутрь рабочей емкости 202 или 208 газа под давлением рабочая емкость расширяется и отделяет поверхность 201 СЭ 108 от постоянного магнита 203, высвобождая СЭ 108 от воздействия сил притяжения магнитом 203. Далее происходит отделение СЭ 108 под воздействием собственного веса, а клапан перекрывает доступ газа и открывает выход газа из рабочей емкости в атмосферу. Рабочая емкость 202 (или 208) под действием собственных упругих сил переходит в исходное (сжатое) положение.
При необходимости доставки СЭ 108 с места его эксплуатации, БПЛА 100 прибывает к месту расположения СЭ 108, и выпускает устройство захвата с помощью лебедки 104 и троса 102. С помощью видеокамеры 101 производится дистанционное (или автоматическое) наблюдение и управление процессом захвата.
ЛИТЕРАТУРА
1. Лихтциндер Б.Я., Маслов О.Н. Способ подзарядки аккумуляторов в беспроводной сенсорной сети. Патент на изобретение № 2730468 от 30.01.2020. Дата гос. регистрации 24.08.2020 г.
2. System and method for placement of sensors through use of unmanned aerial vehicles (US20160232794A1) [Электронный ресурс] / URL: https://patents.google.com/patent/US20160232794A1.
3. Payload-Release Device and Operation Thereof (US20160059963A1) [Электронный ресурс] / URL: https://patents.google.com/patent/US20160059963A1.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство подзарядки аккумуляторных элементов беспроводной сенсорной сети | 2024 |
|
RU2826802C1 |
| Устройство подзарядки аккумуляторов узловых элементов беспроводной сенсорной сети | 2023 |
|
RU2817523C1 |
| СИСТЕМА ТРАНСПОРТИРОВКИ ГРУЗА | 2022 |
|
RU2797077C1 |
| Способ обслуживания сенсорных узлов беспроводных сенсорных сетей | 2021 |
|
RU2790652C1 |
| УСТРОЙСТВО ДЛЯ ПОДВЕСА ГРУЗА | 2022 |
|
RU2797076C1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА ГРУЗА | 2022 |
|
RU2796696C1 |
| Беспилотный летательный аппарат для эвакуации раненых и доставки грузов | 2024 |
|
RU2829580C1 |
| Система посадки беспилотных летательных аппаратов | 2024 |
|
RU2834064C1 |
| СИСТЕМА ДОСТАВКИ ГРУЗА | 2018 |
|
RU2689643C1 |
| СИСТЕМА СКРЫТНОЙ ТРАНСПОРТИРОВКИ И ПУСКА БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА САМОЛЕТНОЙ СХЕМЫ | 2024 |
|
RU2839189C1 |
Система доставки сенсорных элементов беспроводных сенсорных сетей с помощью беспилотных летательных аппаратов содержит размещенные на беспилотном летательном аппарате источник электропитания, электродвигатели, лебедку с тросом и закрепленным на нем постоянным магнитом, при этом верхняя поверхность сенсорного элемента выполняется из ферромагнитного материала, а устройство захвата и удержания сенсорных элементов снабжено сосудом со сжатым газом, соединенным через управляемый клапан с рабочей емкостью, имеющей тороидальную форму и выполненной из эластичного материала, или имеющей кольцевую форму и выполненной в виде сильфона. Обеспечивается возможность транспортировки сенсорных элементов сенсорных сетей без затрат электроэнергии на питание электромагнитов. 2 ил.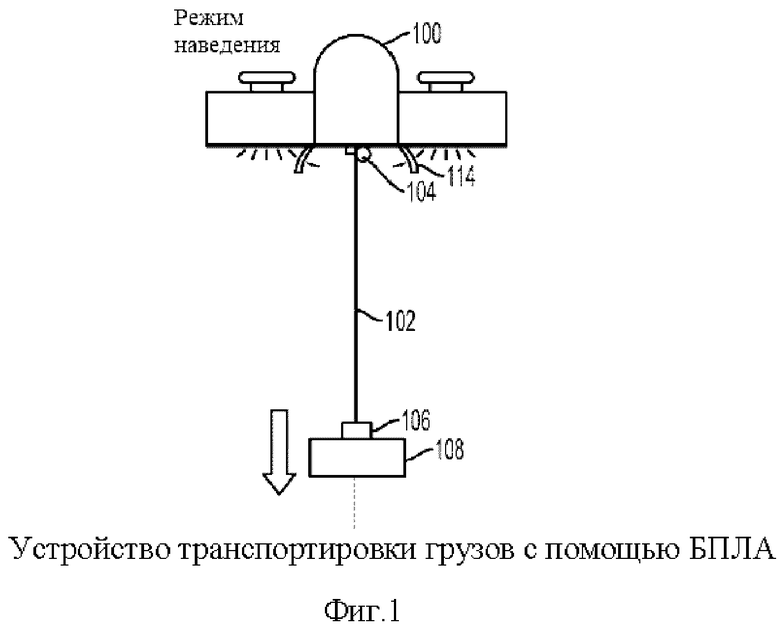
Система доставки сенсорных элементов беспроводных сенсорных сетей с помощью беспилотных летательных аппаратов, содержащая размещенные на беспилотном летательном аппарате источник электропитания, электродвигатели, лебедку с тросом и закрепленным на нем постоянным магнитом, отличающаяся тем, что верхняя поверхность сенсорного элемента выполняется из ферромагнитного материала, а устройство захвата и удержания сенсорных элементов снабжено сосудом со сжатым газом, соединенным через управляемый клапан с рабочей емкостью, имеющей тороидальную форму и выполненной из эластичного материала, или имеющей кольцевую форму и выполненной в виде сильфона, расширение объема которых приводит к преодолению сил магнитного притяжения и освобождению сенсорного элемента.
| US 20160059963 A1, 03.03.2016 | |||
| Грузозахватное устройство | 1980 |
|
SU1081109A1 |
| Магнитный захват (его варианты) | 1984 |
|
SU1209561A1 |
| US 20160232794 A1, 11.08.2016 | |||
| WO 2018033925 A1, 22.02.2018. | |||
