Изобретение относится к области технических средств для обнаружения мин, невзорвавшихся боеприпасов и взрывчатых веществ на железных дорогах.
Задача, решаемая в представляемом изобретении, заключается в снижении вероятности гибели личного состава и своевременной передаче данных об обнаруженных взрывных устройствах для дальнейшего их разминирования.
Известен передвижной широкозахватный индукционный миноискатель (далее, ШИМ), стоящий на вооружении в ВС РФ, антенна георадара которого излучает импульсы электромагнитных волн и регистрирует отраженные сигналы. Аппаратура реагирует на различные слои зондируемой среды, локальные металлические и неметаллические объекты с различными электрофизическими свойствами. Основным недостатком устройства является осуществление его движения по железнодорожному пути за счет физической силы личного состава, так как он не оборудован двигателем. Непосредственное нахождение людей вблизи путей является небезопасным и повышает вероятность поражения от взрывоопасных предметов [1].
В изобретении представлен комплекс, позволяющий осуществлять самостоятельное движение по железнодорожному пути широкозахватного индукционного миноискателя путем замены его колесных пар на модернизированные колесные пары с двигателем по системе «мотор-колесо», а также передачу данных о найденных взрывоопасных предметах в пункт управления.
Принцип работы системы «мотор-колесо» состоит в следующем: в статоре формируется магнитное поле, воздействующее на магниты и вызывающее вращение статора. Все обмотки, находящиеся в статоре, соединяются по окружности в три штуки и чередуются между собой. При прохождении по нему электрического тока, лучи обретают магнитные свойства и начинают притягивать находящиеся на роторе магниты. Для обеспечения непрерывного вращения ротора на магниты подаются импульсы напряжения. При близости к магниту активизируются магнитные характеристики обмоток. Момент увеличения характеристик определятся тремя датчикам Холла, находящимися в статоре электродвигателя. Датчики фиксируют положения ротора по отношению к статору, улавливают магнитное поле и направляют сигнал на контроллер. Далее он в нужный момент направляет импульсы на обмотки, и они осуществляют роль электромагнитов. За счет притяжения магнитов ротора производится его вращение.
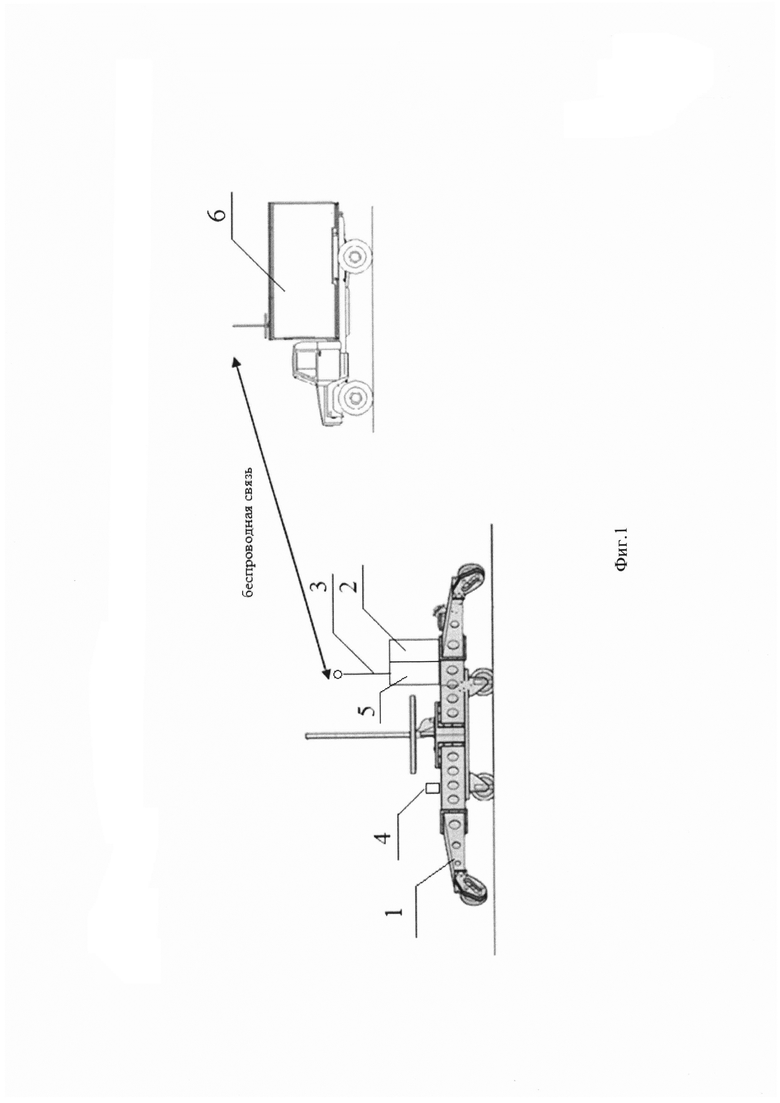
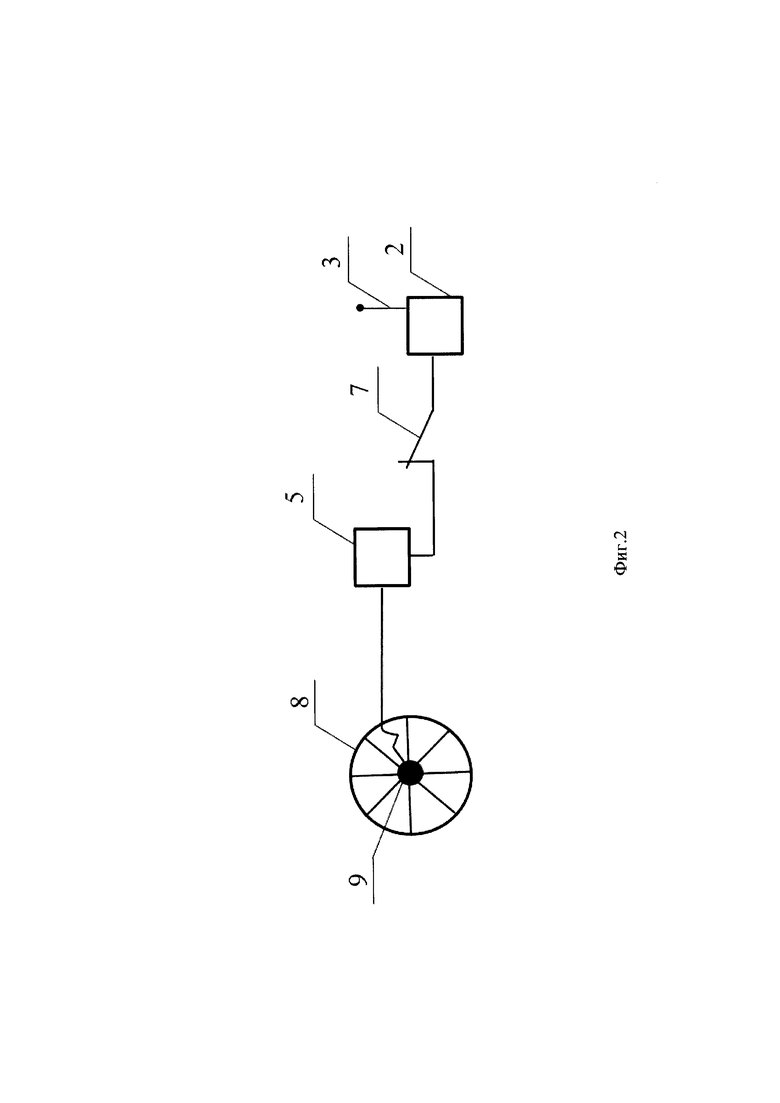
ШИМ (поз. 1), установленный на рельсы, совершает операции по поиску мин на верхнем строении пути с помощью четырех сканеров, установленных на его «рукавах», самостоятельно двигаясь по железнодорожному пути с помощью колесных пар, состоящих из металлических ободов (поз. 8), спиц и блока со статором, ротором и обмотками (поз. 9), управление которыми осуществляется путем подачи сигнала из пункта управления (поз. 6), находящегося на некотором безопасном расстоянии от места поиска взрывоопасных предметов. Сигналы от датчиков, обнаруживших взрывоопасные предметы, передаются в пункт управления с целью их дальнейшего разминирования.
На широкозахватный индукционный миноискатель с помощью специальных креплений к корпусу монтируется блок управления (поз. 2), который с помощью специальных проводов соединен с электрическим реле (поз. 7). На балках миноискателя также монтируется аккумулятор (поз. 5), осуществляющий питание колесных пар путем соединения с ними проводами питания. Подача питания контролируется специальным электрическим реле, позволяющим при размыкании его осуществлять торможение. Контроль над блоком управления двигателя осуществляется оператором из пункта управления. Беспроводная радиосвязь между совершающим поиск взрывоопасных предметов миноискателем и пунктом управления поддерживается путем установки на них контроллеров (приемника и передатчика радиоволн). Приемник обладает внешней антенной (поз. 3), которая принимает радиосигналы. Так как существует большое количество радиоканалов с различной дальностью, необходимо выбрать наиболее возможную дальность. Скорость вращения данной системы регулируется дистанционно, последствием нажатия на рычаг, расположенный на пульте управления. При торможении данной системы отключается подача питания на мотор.
Датчик миноискателя, обнаруживший взрывоопасный предмет, прекращает свое движение, подает информацию на контроллер, закодированная информация передается по заранее определенной частоте на приемное устройство пункта управления, причем частоты для передачи самой закодированной информации и ключей шифрования отличаются для наибольшей безопасности, далее происходит раскодирование информации и принятие решения операторами, находящимися в кабине пункта управления. Кроме того, на широкозахватном индукционном миноискателе установлен датчик геолокации (поз. 4), что позволяет операторам следить за местонахождением устройства при его нахождении вне зоны видимости. При обнаружении взрывоопасного предмета и получении соответствующих координат его местонахождения саперы выдвигаются на место разминирования. После успешного проведения операции миноискатель продолжает свою работу.
Сущность изобретения поясняется чертежами:
На фигуре 1 показан общий вид (вид сбоку) комплекса:
поз. 1 - широкозахватный индукционный миноискатель;
поз. 2 - блок управления с электродвигателем;
поз. 3 - антенна для приема и передачи радиосигналов;
поз. 4 - датчик геолокации;
поз. 5 - пункт управления.
На фигуре 2 показан принцип приведения в движение комплекса.
поз. 7 - электрическое реле;
поз. 8 - металлический обод колеса;
поз. 9 - блок «мотор-колесо».
Список используемых источников:
1. Широкозахватный индукционный миноискатель (ШИМ)
[Электронный ресурс] URL: https://m.infox.ru/news/38/33573-minoborony-postavilo-uraly-na-relsy.
| название | год | авторы | номер документа |
|---|---|---|---|
| Комплекс по обнаружению взрывоопасных предметов на железнодорожных путях | 2019 |
|
RU2746852C2 |
| Устройство дистанционного разминирования | 2015 |
|
RU2638886C2 |
| Устройство дистанционного разминирования | 2015 |
|
RU2766488C2 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ЗОНДИРОВАНИЯ ПОВЕРХНОСТИ ЗЕМЛИ ДЛЯ ПОИСКА И МАРКИРОВКИ ВЗРЫВООПАСНЫХ ПРЕДМЕТОВ | 2024 |
|
RU2822025C1 |
| Самоходное бронированное транспортное средство обеспечения разминирования и подготовки объектов к разрушению и крепление для установки навесного оборудования | 2017 |
|
RU2648659C1 |
| ГУСЕНИЧНЫЙ ТРАКТОР-ТЯГАЧ ГРУЗОПОДЪЕМНОЙ МАШИНЫ | 2019 |
|
RU2726350C1 |
| Комбинированный металло-газоиндикатор | 2023 |
|
RU2815363C1 |
| МОДУЛЬНЫЙ ШИРОКОЗАХВАТНЫЙ КОМПЛЕКС МИНОИСКАТЕЛЕЙ | 2022 |
|
RU2794242C1 |
| СПОСОБ КОМПЛЕКСНОГО, ПРИ НЕОБХОДИМОСТИ, СКРЫТОГО ПОИСКА И ОБНАРУЖЕНИЯ ВЗРЫВЧАТЫХ ВЕЩЕСТВ И ВЗРЫВООПАСНЫХ ПРЕДМЕТОВ | 2004 |
|
RU2248593C1 |
| ДИСТАНЦИОННО УПРАВЛЯЕМЫЙ МОБИЛЬНЫЙ РОБОТ, ВИДЕОКАМЕРА МОБИЛЬНОГО РОБОТА, ЗВУКОПРИЕМНАЯ СИСТЕМА САМОНАВЕДЕНИЯ МОБИЛЬНОГО РОБОТА, СФЕРИЧЕСКАЯ ГРАНАТА | 2011 |
|
RU2473863C1 |
Изобретение относится к области технических средств для обнаружения мин, невзорвавшихся боеприпасов и взрывчатых веществ на железных дорогах. Предлагаемый роботизированный комплекс на железнодорожном ходу по обнаружению взрывоопасных предметов на верхнем строении пути включает в себя передвижной широкозахватный индукционный миноискатель (ШИМ), оборудованный модернизированной колесной парой с двигателем по системе «мотор-колесо», аккумулятор для подачи питания на двигатель, блок управления, датчик геолокации, внешнюю антенну для бесконтактной передачи и приема информации и пункт управления с рабочим местом оператора, отличающийся тем, что является самоходным, а передача информации и управление ведется дистанционно на безопасном расстоянии, что позволяет снизить вероятность гибели личного состава при проведении разведки и потери времени и ресурсов при минной разведке. Техническим результатом, обеспечивающим безопасное проведение обнаружения взрывоопасных предметов на верхнем строении пути, является оснащение передвижного широкозахватного индукционного миноискателя двигателем, позволяющим комплексу двигаться без применения физической силы личного состава, а управление им оператором дистанционно из пункта управления. 2 ил.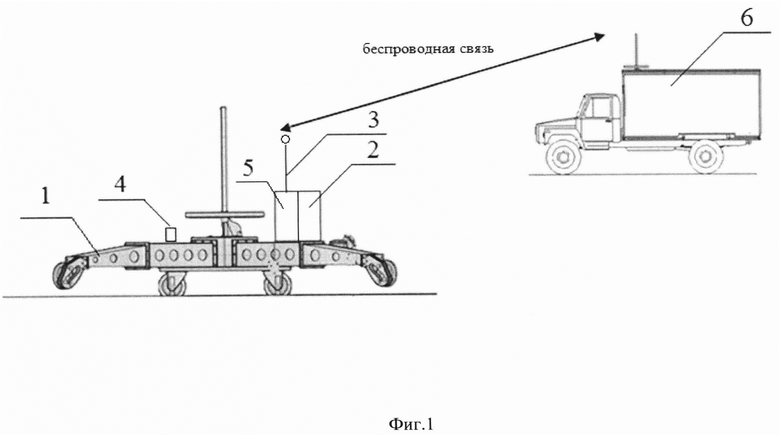
Роботизированный комплекс на железнодорожном ходу по обнаружению взрывоопасных предметов на верхнем строении пути, включающий в себя передвижной широкозахватный индукционный миноискатель (ШИМ), оборудованный модернизированной колесной парой с двигателем по системе «мотор-колесо», аккумулятор для подачи питания на двигатель, блок управления, датчик геолокации, внешнюю антенну для бесконтактной передачи и приема информации и пункт управления с рабочим местом оператора, отличающийся тем, что является самоходным, а передача информации и управление ведется дистанционно на безопасном расстоянии, что позволяет снизить потери времени и ресурсов при минной разведке.
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
| RU 2692508 C1, 25.06.2019 | |||
| US 8714069 B1, 06.05.2014. | |||

