Изобретение относится к области экспериментальной аэродинамики летательных аппаратов и может быть использовано при исследованиях характеристик аэродинамической модели (АДМ) в процессе испытаний в аэродинамической трубе.
Стандартная программа испытаний, обеспечивающая полный цикл экспериментальный исследований аэродинамической модели, насчитывает более чем 250 различных вариантов установки органов управления и взлетно-посадочной механизации. Традиционно для обеспечения требуемого угла установки отклоняемой аэродинамической поверхности используются кронштейны-фиксаторы.
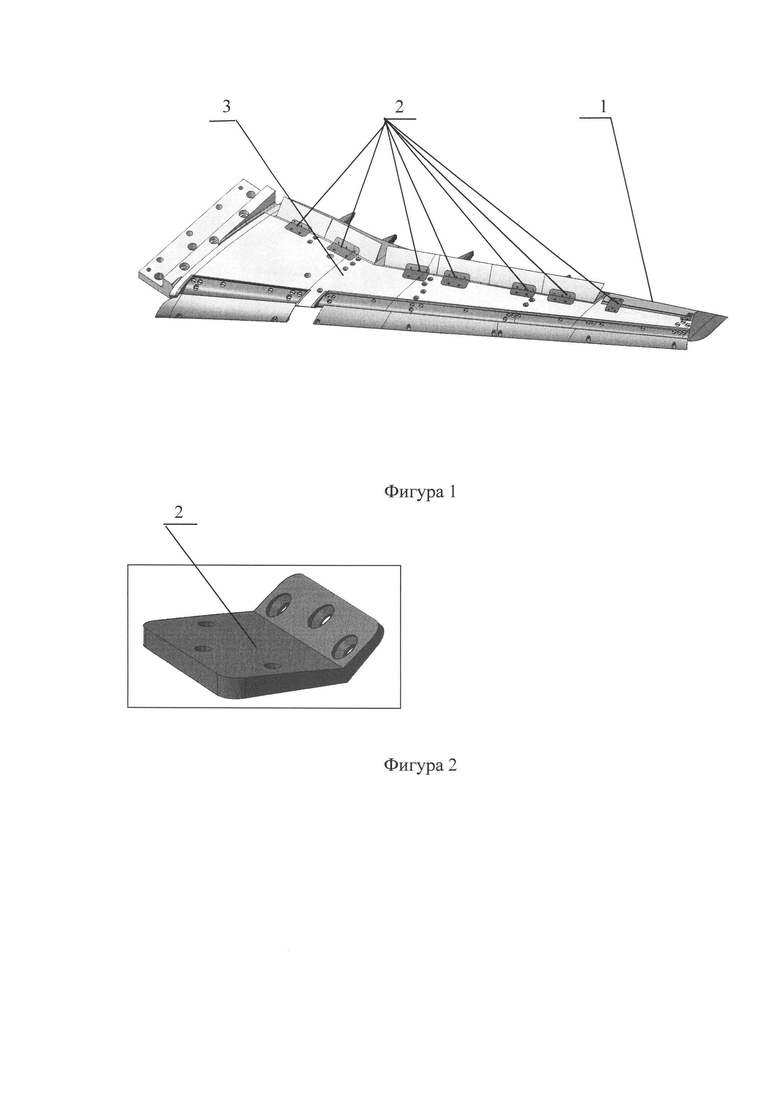
Эти фиксаторы 2 (фиг. 2) представляют собой металлические пластины, базовые поверхности которых образуют углы, соответствующие углам отклонения рулевых поверхностей. Они закрепляются с одной стороны в пазах, выполненных в консоли крыла 3, с другой - на отклоняемой аэродинамической поверхности 1 (фиг. 1).
Традиционно, во время типового испытания положения всех органов управления за исключением исследуемого фиксируются. Исследуемый орган управления переставляется на углы, заданные в соответствии с программой испытаний. После проведения одного эксперимента каждый раз выполняется смена угла установки органа управления. На модели с использованием кронштейнов-фиксаторов, на период выполнения данной операции, испытания прерываются. Выполняемая перестановка (замена одного фиксатора на другой и, при необходимости, доработка поверхности модели быстросохнущей полимерной пастой), приводит к потерям времени и существенному затягиванию эксперимента. Данная технология выполнения эксперимента описана в Руководстве для конструкторов (РДК-43). Том 1, Аэродинамика. Гидромеханика. Прочность. Издательство Бюро новой техники, 1943 г.
Для отработки способа и механизма отклонения рулевых поверхностей был создан стенд-имитатор, обеспечивающий непрерывное отклонение рулевой аэродинамической поверхности на требуемые углы в процессе эксперимента и позволяющий провести апробацию управления рулевой поверхностью вне аэродинамической трубы. Данный стенд-имитатор защищен патентом на полезную модель RU №180290, МПК G01M 9/00, 2018. Стенд-имитатор, содержит гидравлический привод, датчик перемещений, силовой каркас (основание и балки) с установленным на нем фрагментом консоли крыла, узла нагружения элерона, компактных тензовесов; системы тяг и кронштейна для крепления испытуемого элерона. Работа стенда происходит следующим образом. По командам с датчика перемещений шток гидроцилиндра выдвигается для обеспечения требуемых углов отклонения элерона вверх. Тяга сдвигается вперед и через вилку тензовесов перемещает кронштейн, который поворачивает элерон относительно своей оси. При этом штоки загрузочного устройства выдвигаются и проворачиваются относительно своих осей вслед за движением элерона. В процессе движения штоков происходит обжатие пружин, создающее противодействующую нагрузку на элерон. Для поворота элерона от нейтрального положения вниз шток гидроцилиндра убирается, кинематические элементы стенда совершают движения, аналогичные движениям при повороте элерона вверх, но противоположного направления. Стенд позволяет провести предварительные испытания отклоняемого элерона вне аэродинамической трубы с имитацией нагрузок примерно равных, действующим на отклоняемый элерон в процессе трубных испытаний и проверить работу системы управления, имитируя испытания по заданной программе. В реальных испытаниях в аэродинамической трубе данная конструкция неприменима.
Актуальным становится проведение исследований в аэродинамической трубе при непрерывном отклонении рулевых аэродинамических поверхностей в процессе всего эксперимента.
Задачей изобретения является разработка способа управления рулевыми поверхностями аэродинамической модели самолета (элеронами, интерцепторами, воздушными тормозами и др.) непосредственно в течение эксперимента в аэродинамической трубе.
Технический результат - сокращение времени трубного эксперимента.
Решение поставленной задачи и технический результат достигаются тем, что с подачей управляющего сигнала на устройство управления приводом рулевой поверхности и с последующим формированием выходного сигнала для привода, перемещением его штока и отклонением рулевой поверхности, задают требуемый угол наклона рулевой поверхности, получают сигнал о текущем состоянии наклона рулевой поверхности, подачу управляющего сигнала на устройство управления приводом рулевой поверхности производят одновременно с подачей на него сигнала о текущем состоянии рулевой поверхности, а формирование выходного сигнала для привода осуществляют суммированием сигналов, полученных устройством управления приводом рулевой поверхности.
На фигуре 1 показано крыло АДМ самолета с отклоненными рулевыми поверхностями при помощи фиксаторов.
На фигуре 2 показан фиксатор для установки рулевых поверхностей отклоненными на определенный угол.
На фигуре 3 показан механизм поворота, состоящий из привода и датчика положения, установленных внутри консоли крыла АДМ, рядом с отклоняемой рулевой поверхностью.
На фигуре 4 показана кинематическая схема механизма отклонения рулевой поверхности АДМ (элеронами, интерцепторами, воздушными тормозами и др.).
На фигуре 5 показана принципиальная схема управления рулевыми поверхностями АДМ самолета.
Крыло АДМ самолета с жестко зафиксированными органами управления при помощи фиксаторов 2, за исключением исследуемой рулевой поверхности 1, которую поворачивают на определенные углы по программе испытаний, подготовлено к трубному эксперименту. Поворот рулевой поверхности 1 может быть осуществлен непосредственно во время эксперимента, без временных затрат на подготовку отдельного испытания. В качестве силового привода для системы управления рулевыми поверхностями используется компактный привод 6 (см. фигура 3, 4, 5). Шток 5 привода 6 соединяют с отклоняемой рулевой поверхностью 1, посредством тяги 7, соединенной через вилку 8 к отклоняемой рулевой поверхности 1. Компьютер 9 управляет контроллером 10, который представляет собой интерфейс ввода-вывода сигналов, имеющий цифро-аналоговые и аналогово-цифровые преобразователи, контроллер 10 подключен к устройству управления 11, который считывает показания датчика линейного перемещения 4, связанного непосредственно со штоком 5 привода 6 (см. фигура 3, 5).
С помощью программного обеспечения задают требуемый угол отклонения рулевой поверхности. При этом автоматически рассчитанный сигнал посредством контроллера 10 передают на устройство управления 11 (см. фигура 5). Устройство управления 11 считывает показания датчика линейного перемещения 4 (см. фигура 3), связанного непосредственно со штоком 5 привода 6 (см. фигура 3, 4), сверяет их с полученным сигналом управления и передает суммированный сигнал на привод 6 тем самым меняя направление и скорость перемещения штока 5 привода 6 (см. фиг. 3, 5). При этом в постоянном режиме контролируют сигнал с датчика линейного перемещения 4 штока 5 (см. фиг. 3, 5). Шток 5 привода 6 перемещают на необходимое расстояние, тягой 7 передают возвратно-поступательное движение штока 5 через вилку 8 на отклоняемую рулевую поверхность 1, преобразуя возвратно-поступательное движение штока 5 привода 6 в поворотное движение рулевой поверхности 1 на заданный угол (см. фиг 3, 4). Данный подход к управлению процессом регулирования позволяет удерживать положение рулевой поверхности 1, а также корректировать его при внешнем воздействии, например, при воздействии набегающим потоком воздуха в аэродинамической трубе. Жесткость системы обеспечивает требуемую повторяемость и постоянную зависимость угла поворота отклоняемой поверхности 1 от хода штока 5 привода 6.
Таким образом разработан способ управления рулевыми поверхностями аэродинамической модели самолета (элеронами, интерцепторами, воздушными тормозами и др.), что позволяет сократить время трубного эксперимента.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство измерения шарнирного момента отклоняемой поверхности | 2018 |
|
RU2681251C1 |
| АКТИВНАЯ СИСТЕМА РАННЕГО РАЗРУШЕНИЯ СБЕГАЮЩИХ ВИХРЕЙ | 1998 |
|
RU2223892C2 |
| СПОСОБ (ВАРИАНТЫ) УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ И УСТРОЙСТВО (ВАРИАНТЫ) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2299834C2 |
| ПЯТИКОМПОНЕНТНЫЕ ТЕНЗОВЕСЫ | 2015 |
|
RU2595321C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОСЕКЦИОННЫМ РУЛЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2697634C2 |
| Комбинированная динамически-подобная аэродинамическая модель для разных видов аэродинамических испытаний | 2023 |
|
RU2808290C1 |
| Способ и устройство улучшения путевой управляемости самолета-амфибии (гидросамолета) при глиссировании | 2018 |
|
RU2692740C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВУХДВИГАТЕЛЬНЫМ САМОЛЕТОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2392186C2 |
| Однокомпонентные тензовесы для измерения шарнирного момента | 2023 |
|
RU2798685C1 |
| КРЫЛО С АЭРОДИНАМИЧЕСКОЙ ШТОРОЙ | 2016 |
|
RU2646686C2 |


Изобретение относится к области экспериментальной аэродинамики летательных аппаратов и может быть использовано при исследованиях характеристик аэродинамической модели (АДМ) в процессе испытаний в аэродинамической трубе. Способ включает в себя подачу управляющего сигнала на устройство управления приводом рулевой поверхности с последующим формированием выходного сигнала для привода, перемещением его штока и отклонением рулевой поверхности, при этом задают требуемый угол наклона рулевой поверхности, получают сигнал о текущем состоянии наклона рулевой поверхности, подачу управляющего сигнала на устройство управления приводом рулевой поверхности производят одновременно с подачей на него сигнала о текущем состоянии рулевой поверхности, а формирование выходного сигнала для привода осуществляют суммированием сигналов, полученных устройством управления приводом рулевой поверхности. Технический результат заключается в возможности сократить время трубного эксперимента. 1 з.п. ф-лы, 5 ил. 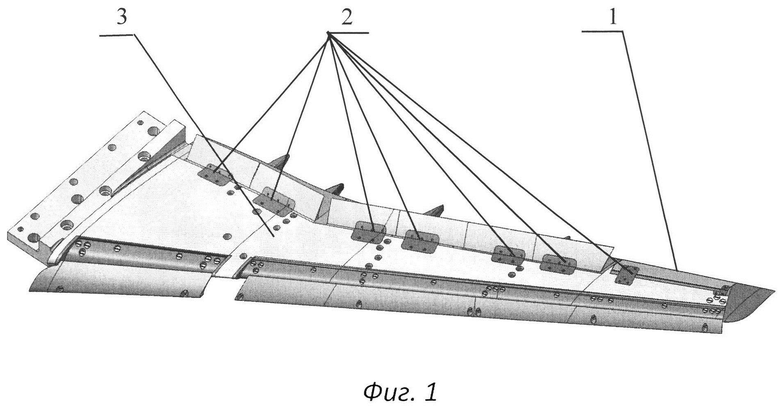
1. Способ управления рулевыми поверхностями аэродинамической модели самолета, включающий в себя подачу управляющего сигнала на устройство управления приводом рулевой поверхности с последующим формированием выходного сигнала для привода, возвратно-поступательным перемещением его штока и отклонением рулевой поверхности, отличающийся тем, что посредством компьютера по программе испытаний задают угол наклона рулевой поверхности, сформированный компьютером сигнал посредством контроллера передают на устройство управления приводом рулевой поверхности, перемещая его шток с отклонением рулевой поверхности, и получают от датчика линейного перемещения сигнал о текущем состоянии штока и рулевой поверхности, при этом подачу управляющего сигнала на устройство управления приводом рулевой поверхности производят одновременно с подачей на него сигнала о текущем состоянии рулевой поверхности, а формирование выходного сигнала для привода осуществляют суммированием сигналов, полученных устройством управления приводом рулевой поверхности.
2. Способ управления рулевыми поверхностями аэродинамической модели самолета по п.1, отличающийся тем, что сигнал с датчика линейного перемещения штока передают в постоянном режиме.
| СПОСОБ ОПРЕДЕЛЕНИЯ ШАРНИРНОГО МОМЕНТА РУЛЕВЫХ ОРГАНОВ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ИСПЫТАНИИ В АЭРОДИНАМИЧЕСКОЙ ТРУБЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2003 |
|
RU2243526C1 |
| ГАЗОВЫЙ ЭЖЕКТОР | 0 |
|
SU180290A1 |
| 0 |
|
SU171693A1 | |
| Уключина | 1929 |
|
SU19070A1 |
| CN 102305699 A 04.01.2012. | |||

