Изобретение относится к области управления летательным аппаратом (ЛА), рулевая поверхность которого разделена на несколько секций, и может быть использовано для сохранения его управляемости и устойчивости при отказах отдельных секций руля. Переход от механического управления рулевыми поверхностями летательных аппаратов к системам дистанционного управления, бурное развитие вычислительной и цифровой техники позволяет реализовывать на перспективных летательных аппаратах новые способы управления многосекционными рулями.
Известен способ управления многосекционным рулем летательного аппарата, когда управляемая плоскость крыла разделена на много секций (несколько интерцепторов, элеронов, элевонов и так далее), при котором для управления траекторией полета или ее коррекции каждую секцию отклоняют одним или большим числом приводов в соответствии с заданным законом. Секционирование позволяет уменьшить вес и габариты приводов секций, обеспечить равномерное распределение нагрузки и сохранить работоспособность при отказе одной или более секций [Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов / под ред. Г.С. Бюшгенса. -М.: Наука. Физматлит, 1998. - 816 с. С. 446-448]. При электрическом управлении для сохранения симметрии в управляющем моменте по крену используют попарный контроль работы симметрично расположенных секций правой и левой плоскостей крыла. В случае отказа какой-либо секции производят отключение секций обеих плоскостей крыла, то есть отключают отказавшую секцию и симметричную ей секцию на другом полукрыле. При управлении гидромеханическими приводами секций от общего резервированного сервопривода через механическую проводку в случае отказа какого-либо привода секции эту секцию «пересиливают» остальными секциями. Устранение асимметрии в этом случае осуществляют путем отключения гидросистемы на другом полукрыле.
Недостатком способа является ухудшение характеристик управляемости летательного аппарата при отказе какой-либо секции многосекционного руля, а при заклинивании отказавшей секции под углом к плоскости крыла -ухудшение характеристик устойчивости.
Наиболее близким по технической сущности и достигаемому эффекту (прототип) к предлагаемому способу является способ управления многосекционным рулем летательного аппарата с аэродинамическим суммированием действий отдельных секций, состоящий в формировании для полета летательного аппарата по заданной траектории или ее коррекции команд управления каждой секцией, обеспечивающих требуемое значение эффективного отклонения эквивалентного односекционного руля, при котором коэффициент момента руля равен сумме коэффициентов моментов его отдельных секций, и передаче их на многоканальные приводы каждой секции [Гониодский В.И., Склянский Ф.И., Шумилов И.С. Привод рулевых поверхностей самолетов. - М.: «Машиностроение», 1974. - 320 с. С. 185-186]. Для получения необходимых характеристик устойчивости и управляемости самолета и обеспечения безопасности при выходе из строя отдельных секций руля их отключают путем жесткой фиксации в положении, близком к нейтральному. Для устранения возникающих при этом моментов предусматривают специальную систему контроля для отключения секций руля, симметрично расположенных относительно отказавших секций с другой стороны оси самолета.
Недостатком способа является ухудшение характеристик управляемости летательного аппарата при одновременном отключении отказавшей секции одной плоскости крыла и симметричной ей секции другой плоскости крыла, находящейся в рабочем состоянии.
Техническим результатом настоящего изобретения является максимальное сохранение устойчивости и управляемости летательного аппарата при отключении отказавшей секции за счет формирования законов управления каждой исправной секцией многосекционного руля, обеспечивающих требуемое эффективное отклонение эквивалентного односекционного руля и компенсацию возникающей при отказе секции аэродинамической асимметрии летательного аппарата.
Указанный результат достигается тем, что в известном способе управления многосекционным рулем летательного аппарата, заключающемся в формировании для полета летательного аппарата по заданной траектории или ее коррекции команд управления каждой секцией, обеспечивающих требуемое значение эффективного отклонения эквивалентного односекционного руля, при котором коэффициент момента руля равен сумме коэффициентов моментов его отдельных секций, передаче их на приводы каждой секции, при этом для сохранения характеристик устойчивости и управляемости самолета и обеспечения безопасности при выходе из строя отдельных секций руля их отключают путем жесткой фиксации в положении, близком к нейтральному, согласно изобретению при отказе любой секции на одной из плоскостей летательного аппарата симметричную ей секцию на другой плоскости не отключают, а продолжают использовать в процессе управления летательным аппаратом, при этом законы управления отдельными секциями изменяют таким образом, чтобы максимально сохранить эффективное отклонение эквивалентного односекционного руля и скомпенсировать возникшую аэродинамическую асимметрию летательного аппарата для сохранения управляемости и устойчивости летательного аппарата.
Сущность изобретения заключается в том, что при известных зависимостях возникающих моментов от угла отклонения каждой секции многосекционного руля летательного аппарата в случае возникновения отказа какой-либо секции ее отключают, рассчитывают управляющие команды для всех оставшихся исправными секций таким образом, чтобы парировать отказ, максимально обеспечить эффективное отклонение эквивалентного односекционного руля и скомпенсировать возникающий при отключении отказавшей секции момент.
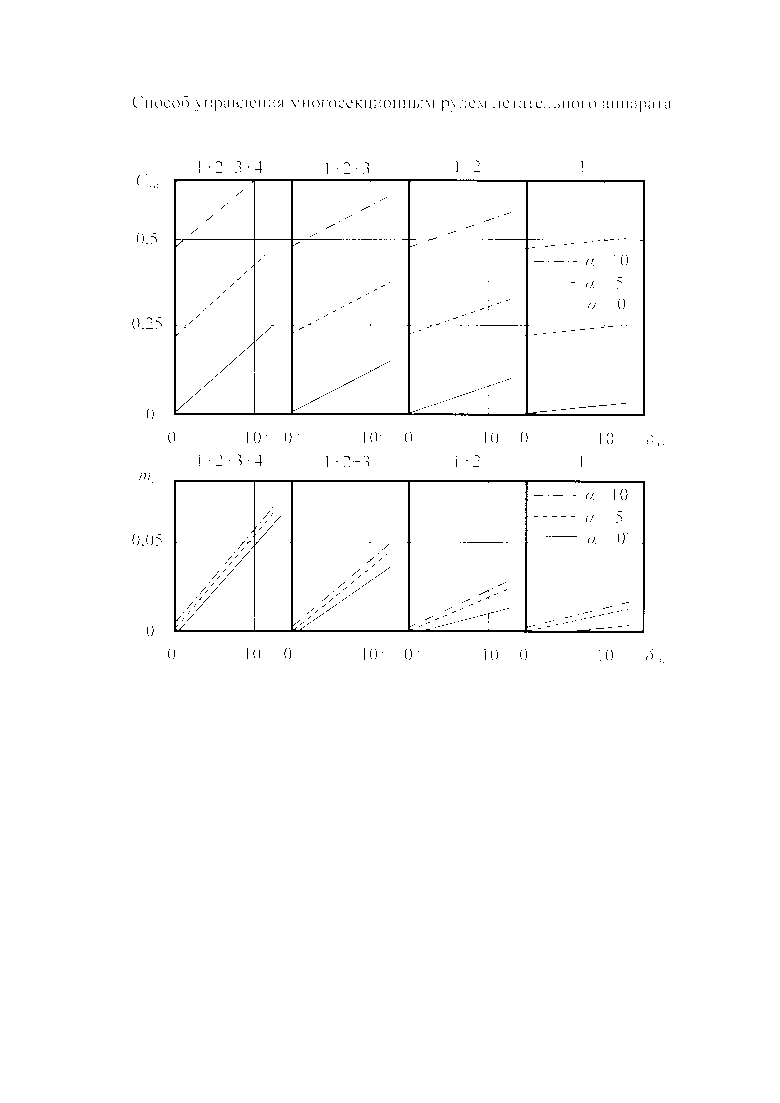
Сущность изобретения поясняется чертежом, где представлены зависимости эффективности различных секций элевонов в функции углов [Аэродинамика, устойчивость и управляемость сверхзвуковых самолетов / под ред. Г.С. Бюшгенса. -М.: Наука. Физматлит, 1998. - 816 с. С. 342], полученные при исследовании на модели самолета в Центральном аэрогидродинамическом институте им. Н.Е. Жуковского (ЦАГИ). На фигуре имеются следующие обозначения: Суа - коэффициент подъемной силы летательного аппарата от угла атаки α; mz - коэффициент аэродинамического момента тангажа; δэв - угол отклонения элевона; 1+2+… - число отклоняемых элевонов, при этом 1 - номер элевона, находящегося на конце полуплоскости крыла, 2, 3 - следующие элевоны в направлении фюзеляжа, 4 - корневой элерон, расположенный возле фюзеляжа.
Из чертежа видно, что соответствующий подбор числа отклоняемых секций и угла отклонения каждой секции рулевой поверхности позволяет парировать отказ какой-либо секции без отключения симметрично расположенной секции другой полуплоскости крыла. Для этого необходимо знание зависимостей аэродинамических характеристик летательного аппарата от угла отклонения каждой секции руля, что проводится заранее с помощью продувки летательного аппарата или его макета в соответствующих институтах (например, ЦАГИ) или, если это летательный аппарат не массового производства, с помощью программных продуктов типа ANSYS.
Согласно заявленному изобретению при возникновении отказа какой-либо секции многосекционного руля летательного аппарата в вычислителе в соответствии с заложенными зависимостями аэродинамических характеристик летательного аппарата от угла отклонения каждой секции руля, полученными заранее с помощью продувки планера летательного аппарата, вычисляют управляющие команды отклонения на расчетный угол для приводов каждой секции таким образом, чтобы эффективный угол отклонения эквивалентного односекционного руля соответствовал эффективному углу отклонения эквивалентного односекционного руля в штатной ситуации (без отказа секции). Этим достигается указанный в изобретении технический результат.
Способ может быть реализован следующим образом.
1. Заранее на стадии выбора планера аппарата проводят продувку летательного аппарата при всех возможных отклонениях каждой секции многосекционного руля для определения эффективности в диапазоне возможных режимов для каждой секции и получения зависимостей аэродинамических характеристик от углового положения каждой секции.
2. Для всех возможных режимов полета с учетом полученных зависимостей определяют варианты законов отклонения каждой секции для формирования требуемого эффективного угла отклонения эквивалентного односекционного руля, в том числе при возможном отказе любой секции.
Например, коэффициент момента секционированного руля относительно оси самолета можно представить в виде [Гониодский В.И., Склянский Ф.И., Шумилов И.С. Привод рулевых поверхностей самолетов. - М.: «Машиностроение», 1974. - 320 с. С. 185]  , где тр i - коэффициент момента i-ой секции. Зависимость коэффициента руля от производной
, где тр i - коэффициент момента i-ой секции. Зависимость коэффициента руля от производной  и угла отклонения руля δ следующая:
и угла отклонения руля δ следующая:  Обозначив δэфф эффективный угол отклонения эквивалентного односекционного руля, при котором коэффициент момента руля равен сумме моментов его отдельных секций, отклоненных на разные углы, и приняв для i-ой секции
Обозначив δэфф эффективный угол отклонения эквивалентного односекционного руля, при котором коэффициент момента руля равен сумме моментов его отдельных секций, отклоненных на разные углы, и приняв для i-ой секции  , получим
, получим  , где ki,δi - коэффициент передачи и угол отклонения i-ой секции, соответственно. Таким образом, зависимость эффективного угла руля от коэффициента передачи и углового положения каждой секции:
, где ki,δi - коэффициент передачи и угол отклонения i-ой секции, соответственно. Таким образом, зависимость эффективного угла руля от коэффициента передачи и углового положения каждой секции:  Для более полного использования эффективности каждой секции коэффициенты передачи каждой секции целесообразно делать не постоянными, как реализовано в прототипе, а регулируемыми.
Для более полного использования эффективности каждой секции коэффициенты передачи каждой секции целесообразно делать не постоянными, как реализовано в прототипе, а регулируемыми.
3. Записывают полученные законы управления каждой секцией в вычислительное устройство.
4. При выполнении полета при отказе какой-либо секции отключают ее, выставив по возможности в нейтральное положение, и, в зависимости от режима полета и углового положения отказавшей секции, с помощью вычислителя определяют требуемые углы отклонения для каждой исправной секции для достижения требуемого эффективного отклонения эквивалентного односекционного руля.
Таким образом, предложенное техническое решение позволяет решить поставленную техническую задачу: максимальное сохранение устойчивости и управляемости летательного аппарата при отключении отказавшей секции за счет формирования законов управления каждой исправной секцией многосекционного руля, обеспечивающих требуемое эффективное отклонение эквивалентного односекционного руля и компенсацию возникающей при отказе секции аэродинамической асимметрии летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2008 |
|
RU2435707C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТИПА ЛЕТАЮЩЕЕ КРЫЛО | 2019 |
|
RU2744692C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПРИВОДАМИ МНОГОСЕКЦИОННОГО РУЛЯ САМОЛЕТА | 2023 |
|
RU2811754C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2493053C1 |
| СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОПЛАНОМ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2022 |
|
RU2795885C1 |
| СПОСОБ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ И ЗАВИСАНИЯ САМОЛЕТА В ВОЗДУХЕ | 2016 |
|
RU2656934C2 |
| ЛЕГКИЙ ТАКТИЧЕСКИЙ САМОЛЕТ | 2021 |
|
RU2768101C1 |
| ПОВОРОТНАЯ ЧАСТЬ ХВОСТОВОЙ БАЛКИ САМОЛЕТА | 2022 |
|
RU2806135C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2005 |
|
RU2288140C1 |
| Модульный летательный аппарат и способ его вертикального взлёта | 2021 |
|
RU2777132C1 |
Изобретение относится к способу управления многосекционным рулем летательного аппарата. Для управления многосекционным рулем формируют команды управления каждой секцией для обеспечения требуемых моментов. При выходе секций из строя их отключают и фиксируют в положении, близком к нейтральному, а симметричную ей секцию продолжают использовать путем изменения законов управления отдельными секциями. Обеспечивается максимальное сохранение устойчивости и управляемости летательного аппарата. 1 ил.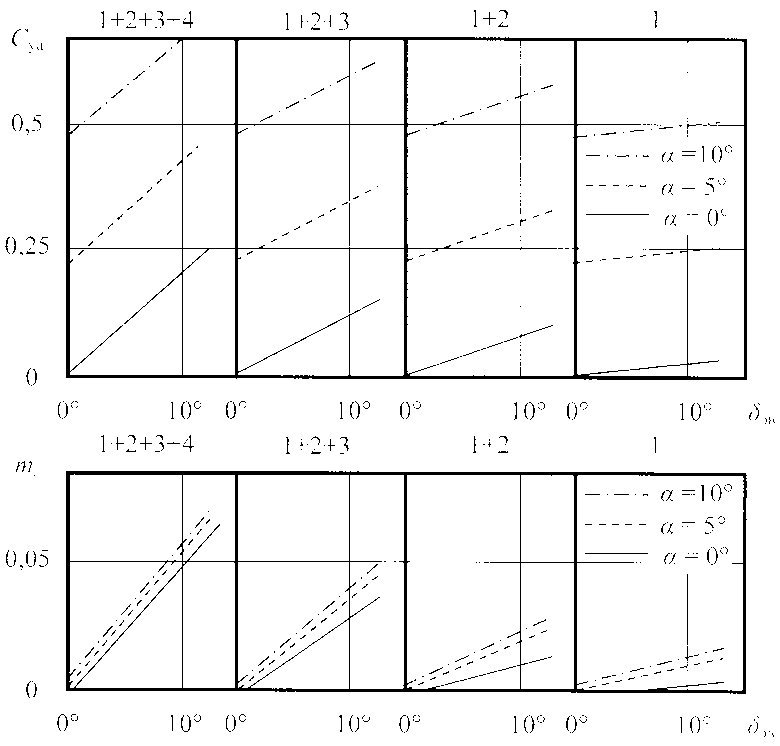
Способ управления многосекционным рулем летательного аппарата, состоящий в формировании для полета летательного аппарата по заданной траектории или ее коррекции команд управления каждой секцией, обеспечивающих требуемое значение эффективного отклонения эквивалентного односекционного руля, при котором коэффициент момента руля равен сумме коэффициентов моментов его отдельных секций, передаче их на приводы каждой секции, при этом для сохранения характеристик устойчивости и управляемости самолета и обеспечения безопасности при выходе из строя отдельных секций руля их отключают путем жесткой фиксации в положении, близком к нейтральному, отличающийся тем, что при отказе любой секции на одной из плоскостей летательного аппарата симметричную ей секцию на другой плоскости не отключают, а продолжают использовать в процессе управления летательным аппаратом, при этом законы управления отдельными секциями изменяют таким образом, чтобы максимально сохранить эффективное отклонение эквивалентного односекционного руля и скомпенсировать возникшую аэродинамическую асимметрию летательного аппарата для сохранения управляемости и устойчивости летательного аппарата.
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ СИСТЕМОЙ СТАБИЛИЗАЦИИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2487052C1 |
| 0 |
|
SU165180A1 | |
| US 0009701404 B2, 11.07.2017 | |||
| US 20160229522 A1, 11.08.2016. | |||

