Изобретение относится к измерительной технике, а именно к гироскопическим приборам, используемым в информационно-измерительных системах ориентации, стабилизации и навигации объектов и управления их движением.
Наиболее близким по технической сущности к заявленному устройству является датчик угла крена на базе волнового твердотельного гироскопа с металлическим резонатором [патент RU 2787809, G01C 19/5691, опубл. 12.01.2023], содержащий металлический цилиндрический резонатор, на дне которого симметрично по окружности с равным шагом расположены восемь пьезоэлементов, причем диаметрально противоположные пьезоэлементы образуют четыре пары, пары пьезоэлементов I-I и II-II входят в первый контур, пары пьезоэлементов III-III и IV-IV входят во второй контур, блок электроники, демодулятор. При этом в блок электроники введен интегрирующий усилитель в первый контур и интегрирующий усилитель во второй контур, образующие обратную связь по угловой скорости, генератор синусоидальных сигналов, для возбуждения свободной волны в металлическом цилиндрическом резонаторе. Для обеспечения запуска генератора синусоидальных сигналов в его электрическую цепь введен ключ. Кроме того, введен дополнительно ключ в электрическую цепь интегрирующего усилителя первого контура.
Недостатком известного датчика угла крена является то, что начальный угол после включения датчика не соответствует углу ориентации подвижного объекта относительно географической системы координат, а определяется конструктивными особенностями резонатора и характеристиками схемы управления, что ограничивает технические возможности и область применения данного датчика.
Задачей заявленного устройства является расширение технических возможностей и области применения датчика угла на базе волнового твердотельного гироскопа с металлическим резонатором в составе информационно-измерительных систем ориентации стабилизации и навигации объектов и управления их движением.
Данная задача решается за счет того, что в корпус датчика угла дополнительно введен трехосный акселерометр, оси которого коллинеарны осям волнового твердотельного гироскопа, обеспечивающий начальную выставку относительно линии местной вертикали, вычислитель угловой ориентации подвижного объекта, обеспечивающий вычисление начальных углов ориентации по сигналам акселерометров и волнового твердотельного гироскопа, и вычислительное устройство с функцией запоминания начальных значений углов ориентации.
Техническим результатом является расширение технических возможностей и области применения датчика угла в составе информационно-измерительных систем ориентации стабилизации и навигации объектов и управления их движением.
Сущность устройства поясняется графическими материалами, где:
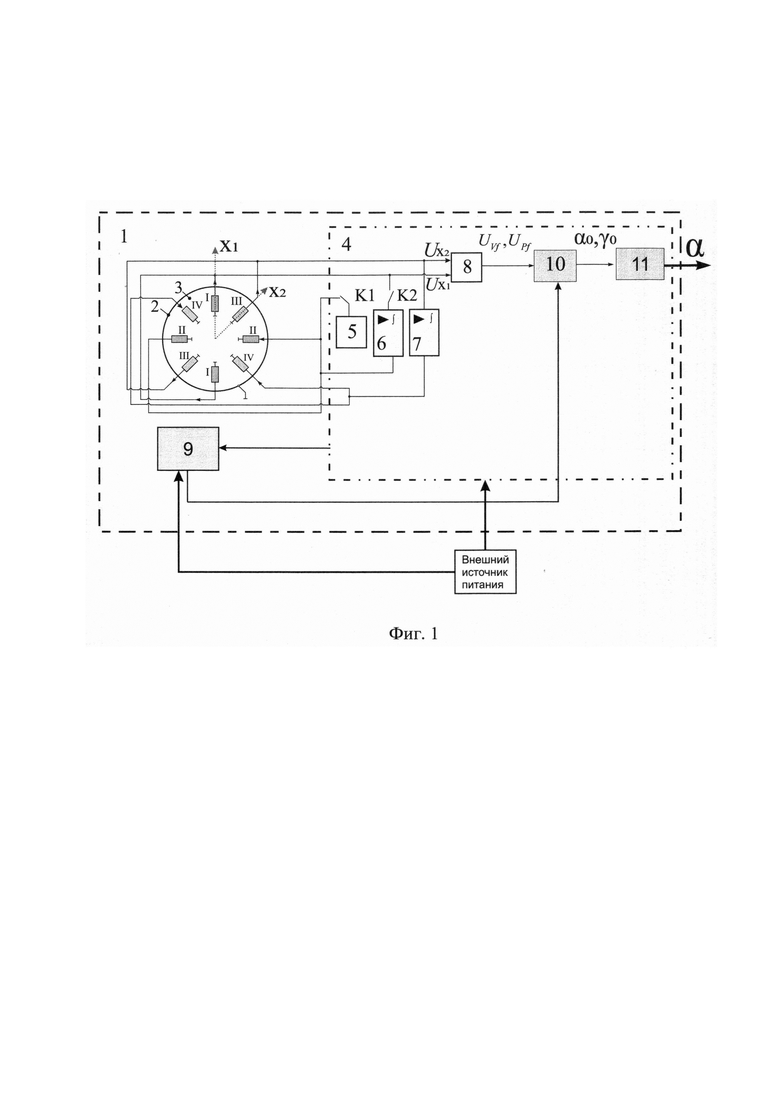
- на фиг. 1 представлена структурная схема реализации датчика угла на базе волнового твердотельного гироскопа (ВТГ) с металлическим резонатором.
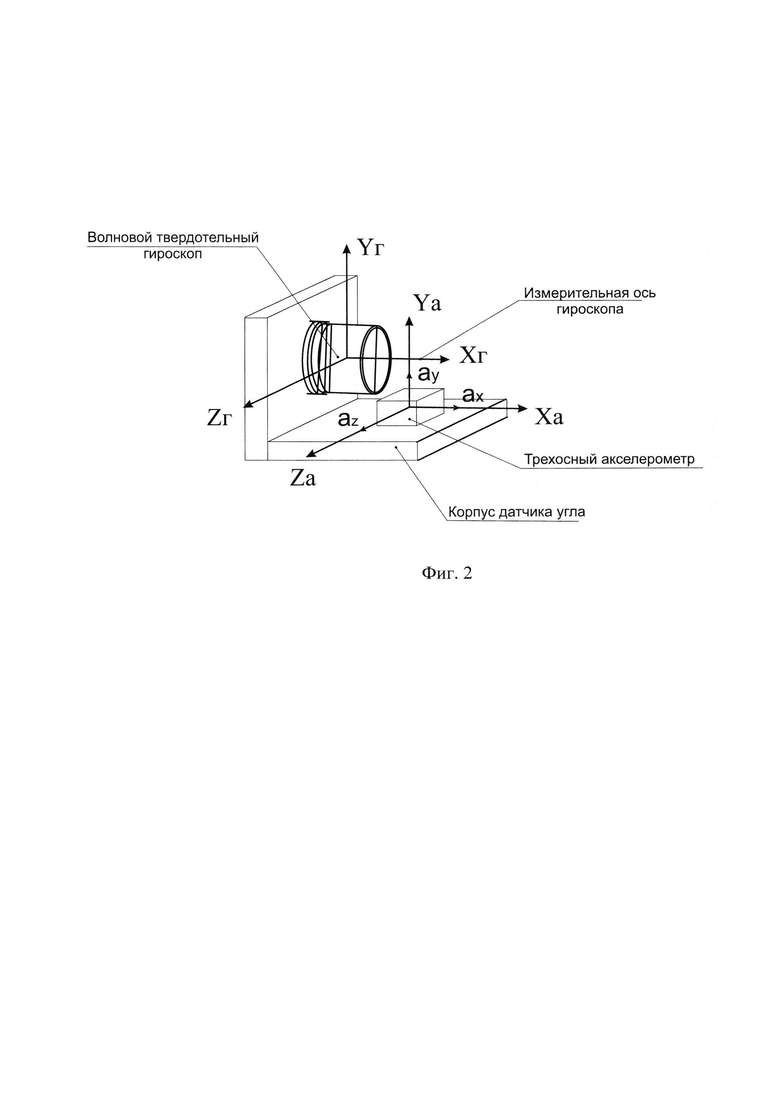
- на фиг. 2 представлена схема расположения измерительной оси волнового твердотельного гироскопа с металлическим резонатором и измерительных осей для трехосного акселерометра.
На фиг. 1 обозначено:
1 - корпус датчика угла;
2 - волновой твердотельный гироскоп;
3 - дно резонатора;
4 - блок электроники;
5 - генератор синусоидальных сигналов;
6, 7 - интегрирующие усилители;
8 - демодулятор;
9 - трехосный акселерометр;
10 - вычислитель угловой ориентации;
11 - вычислительное устройство с функцией запоминания начальных значений углов ориентации.
В корпусе датчика угла 1 располагается волновой твердотельный гироскоп 2 с металлическим цилиндрическим резонатором (показан условно), на дне 3 которого симметрично по окружности с равным шагом расположены восемь пьезоэлементов, причем диаметрально противоположные пьезоэлементы образуют четыре пары. Пары пьезоэлементов I-I и II-II входят в первый контур, пары пьезоэлементов III-III и IV-IV входят во второй контур. В корпусе датчика угла 1 содержится трехосный акселерометр 9 (показан условно), обеспечивающий начальную выставку относительно линии местной вертикали, и блок электроники 4.
Блок электроники 4, входящий в состав датчика угла, содержит: генератор синусоидальных сигналов 5, в электрическую цепь которого введен ключ К1; интегрирующий усилитель 6 с ключом К2, введенный в первый контур; интегрирующий усилитель 7, введенный во второй контур. Питание блока электроники 4 и трехосного акселерометра 9 осуществляется от внешнего источника питания. Генератор синусоидальных сигналов 5 позволяет обеспечить в начальный момент времени возбуждение свободной волны в металлическом цилиндрическом резонаторе, при замкнутом ключе K1 на собственной частоте резонатора. Интегрирующий усилитель 6 в первом контуре и интегрирующий усилитель 7 во второй контур, образуют обратную связь по угловой скорости и позволяют реализовать схемотехнический способ увеличения добротности. Демодулятор 8, входящий в состав блока электроники 4, осуществляет демодуляцию сигналов и передачу информации в вычислитель угловой ориентации подвижного объекта 10, в который также поступает информация с трехосного акселерометра 9. Вычислитель угловой ориентации 10 передает информацию в вычислительное устройство 11 с функцией запоминания начальных значений углов ориентации, полученных по акселерометру и волновому твердотельному гироскопу.
Работает устройство следующим образом.
В начальный момент времени блок электроники 4, входящий в состав датчика угла, подает управляющий сигнал на ключ К1, который замыкается и подает управляющий сигнал на трехосный акселерометр 9. При замыкании ключа К1 с генератора синусоидальных сигналов 5 на диаметрально противоположные пьезоэлементы I-I подается сигнал в виде синусоидального напряжения Asin(ωt), где А - амплитуда, ω - частота подачи переменного сигнала, равная (или близкая) к собственной частоте основной формы колебаний металлического цилиндрического резонатора 2.
Вследствие изгибных деформаций дна 3 металлического цилиндрического резонатора возникает изгибающий момент, который вызывает эллиптические деформации на второй форме колебаний, в результате чего возбуждается стоячая волна с четырьмя областями, ориентированными вдоль пары пьезоэлементов I-I и II-II и четырьмя областями, расположенными вдоль пары пьезоэлементов III-III и IV-IV. Через одну секунду после подачи управляющего сигнала ключ К1 размыкается, а ключ К2 замыкается. Тем самым реализуется схемотехнический способ увеличения добротности, при этом сигнал с пары пьезоэлементов I-I поступает на интегрирующий усилитель 6, расположенный в первом контуре и далее поступает на пару пьезоэлементов II-II. Аналогично сигнал с пары пьезоэлементов III-III поступает на интегрирующий усилитель 7, расположенный во втором контуре и далее поступает на пару пьезоэлементов IV-IV.
При получении управляющего сигнала с блока электроники 4 трехосный акселерометр 9 осуществляет выдачу информации о проекциях вектора линейного ускорения ax, ay, az на соответствующие оси связанной системы координат Ха, Ya, Za, в вычислитель угловой ориентации 10. По сигналам, полученным с трехосного акселерометра 9, осуществляется начальная выставка на основании выражения:

где γ0 - начальный угол ориентации подвижного объекта относительно оси Za по показаниям акселерометров
ax, ay, az - проекции вектора линейного ускорения на соответствующие оси Ха, Ya, Za связанной системы координат.
Полученное значение о начальном угле ориентации γ0 запоминается в вычислителе 11.
После замыкания ключа K2 по полученные сигналы с первого и второго контура ВТГ, сдвинутые по фазе на минус 90 градусов, поступают в вычислитель угловой ориентации 10, где вычисляется начальный угол ВТГ на основании выражения:

где α0 - начальный угол ориентации относительно оси Хг с по показаниям волнового твердотельного гироскопа;
UPƒ - демодулированные напряжения, получаемые с контрольных точек резонатора в первом контуре,
UVƒ - демодулированные напряжения, получаемые с контрольных точек резонатора во втором контуре.
Полученное значение о начальном угле ориентации α0 запоминается в вычислителе 11.
В процессе изменения углового положения подвижного объекта измеряемый угол α датчиком угла на базе ВТГ с металлическим резонатором относительно линии местной вертикали уточняется в блоке вычислителя 11 с учетом запомненных значений начальной ориентации:

где α - измеряемый угол датчиком угла на базе ВТГ с металлическим резонатором,
αt - текущий угол полученный по показаниям ВТГ.
Таким образом, расширяются технические возможности и область применения датчика угла на базе волнового твердотельного гироскопа с металлическим резонатором в составе информационно-измерительных системах ориентации стабилизации и навигации объектов и управления их движением.
| название | год | авторы | номер документа |
|---|---|---|---|
| Датчик угла крена на базе волнового твердотельного гироскопа с металлическим резонатором | 2022 |
|
RU2787809C1 |
| СПОСОБ АЛГОРИТМИЧЕСКОЙ КОМПЕНСАЦИИ ТЕМПЕРАТУРНОЙ СКОРОСТИ ДРЕЙФА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2011 |
|
RU2480713C1 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| ВОЛНОВОЙ ТВЕРДОТЕЛЬНЫЙ ГИРОСКОП С МЕТАЛЛИЧЕСКИМ РЕЗОНАТОРОМ | 2021 |
|
RU2785956C1 |
| ТРЕХОСНЫЙ ГИРОСКОПИЧЕСКИЙ БЛОК | 2007 |
|
RU2344287C2 |
| Пространственный интегрирующий твердотельный волновой гироскоп | 2020 |
|
RU2763688C1 |
| Способ измерения угловой скорости с помощью волнового твердотельного гироскопа | 2020 |
|
RU2738824C1 |
| РЕЗОНАТОР ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА | 2020 |
|
RU2744820C1 |
| Способ определения угловой скорости с использованием волнового твердотельного гироскопа | 2019 |
|
RU2729944C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
Изобретение относится к измерительной технике, а именно к гироскопическим приборам, используемым в информационно-измерительных системах ориентации, стабилизации и навигации объектов и управления их движением. Датчик угла на базе волнового твердотельного гироскопа с металлическим резонатором содержит металлический цилиндрический резонатор, на дне которого симметрично по окружности с равным шагом расположены пьезоэлементы, блок электроники, демодулятор. Дополнительно в корпус датчика угла введен трехосный акселерометр, оси которого коллинеарны осям волнового твердотельного гироскопа, обеспечивающий начальную выставку относительно линии местной вертикали, вычислитель угловой ориентации подвижного объекта, обеспечивающий вычисление начальных углов ориентации по сигналам акселерометров и волнового твердотельного гироскопа, и вычислительное устройство с функцией запоминания начальных значений углов ориентации. Технический результат - расширение технических возможностей применения датчика угла на базе волнового твердотельного гироскопа с металлическим резонатором. 2 ил.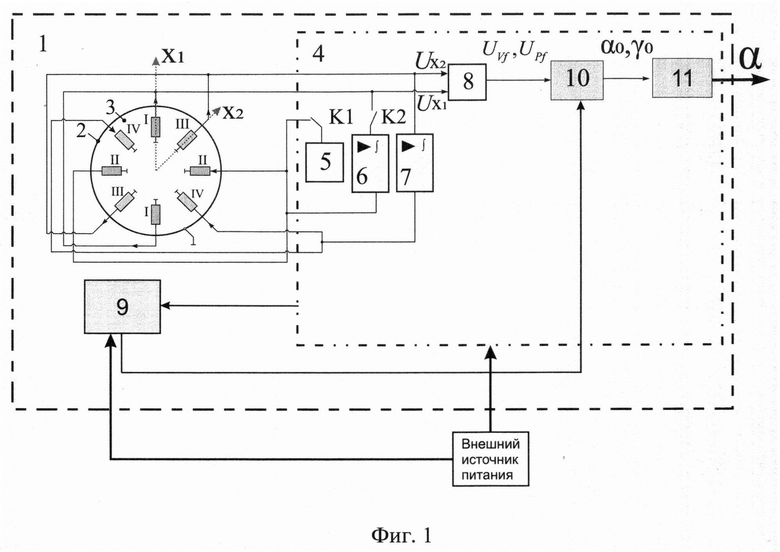
Датчик угла на базе волнового твердотельного гироскопа с металлическим резонатором, содержащий металлический цилиндрический резонатор, на дне которого симметрично по окружности с равным шагом расположены пьезоэлементы, блок электроники, демодулятор, отличающийся тем, что в корпус датчика угла дополнительно введен трехосный акселерометр, оси которого коллинеарны осям волнового твердотельного гироскопа, обеспечивающий начальную выставку относительно линии местной вертикали, вычислитель угловой ориентации подвижного объекта, обеспечивающий вычисление начальных углов ориентации по сигналам акселерометров и волнового твердотельного гироскопа, и вычислительное устройство с функцией запоминания начальных значений углов ориентации.
| Датчик угла крена на базе волнового твердотельного гироскопа с металлическим резонатором | 2022 |
|
RU2787809C1 |
| Способ съемки обводов судов в доке и устройство для осуществления этого способа | 1957 |
|
SU109851A1 |
| МАЛОГАБАРИТНЫЙ ТВЕРДОТЕЛЫЙ ВОЛНОВОЙ ГИРОСКОП | 2007 |
|
RU2362121C2 |
| Способ обработки колец шарико-подшипника из дисперсионнотвердеющего сплава на хромо-никелево-алюминиевой основе | 1990 |
|
SU1754953A1 |

