Изобретение относится к области машиностроения, а именно, к устройству ручного управления исполнительным механизмом, и может быть использовано в качестве ручного привода для запорной и запорно-регулирующей трубопроводной арматуры.
Из патента RU 56542 (F16K 31/05, опубл. 10.09.2006) известно устройство ручного управления исполнительным механизмом, предназначенное для управления поворотными затворами клапанов, регулирующих давление среды в трубопроводе. Исполнительный механизм выполнен в виде зубчатого колеса, установленного на валу электродвигателя. Устройство ручного управления (ручной дублер электродвигателя) содержит корпус, вал и маховик для вращения вала. Устройство ручного управления выполнено с возможностью кинематического соединения и разъединения с исполнительным механизмом при осевом перемещении вала устройства. На валу устройства ручного управления расположена пружина, которая возвращает устройство ручного управления в исходное положение после прекращения давления на маховик.
При работе с ручным дублером оператору приходится одновременно давить на маховик, преодолевая сопротивление пружины, и вращать его, что крайне неудобно и требует больших физических усилий. Такой ручной дублер очень неудобен в эксплуатации и опасен для оператора.
Из патента GB 1209481 (F16D 21/02 F16H 37/00, F16K 31/05, опубл. 21.10.1970) известно устройство ручного управления исполнительным механизмом, выбранное за ближайший аналог. Устройство ручного управления содержит корпус, вал, маховик для вращения вала и ограничитель осевого перемещения вала. Ограничитель осевого перемещения вала устройства включает в себя стопорящий элемент (цилиндрический штифт поз. 42), установленный неподвижно на валу устройства, и втулку с выступом (поз. 44), снабженным карманами (поз. 46) для размещения в указанных карманах стопорящего элемента в рабочем положении устройства ручного управления. Указанная втулка выполнена в виде единой детали с выходным валом исполнительного механизма и расположена со стороны маховика. Устройство ручного управления выполнено с возможностью кинематического соединения и разъединения с исполнительным механизмом при осевом перемещении вала устройства. Исполнительный механизм включает в себя червячное колесо с червячным валом и выходной вал для кинематического соединения с нагрузкой, например, с запорным клапаном. На валу устройства расположена пружина сжатия, установленная с возможностью сжатия при осевом перемещении вала устройства по направлению к исполнительному механизму.
В данном патенте предпринята попытка уменьшить осевое усилие на оператора от действия разжимающего усилия пружины при работе с устройством ручного управления. Предложено ввести ограничитель осевого перемещения вала устройства в рабочем положении. В начале работы нажимают на маховик до размещения стопорящего элемента в кармане выступа втулки, для ограничения осевого перемещения вала с маховиком при дальнейшем вращении вала.
Однако недостатком устройства является то, что указанная втулка выполнена в виде единой детали с выходным валом исполнительного механизма, и фиксация стопорящего элемента в кармане выступа втулки осуществлена за счет нагрузки на выходном валу, на который при работе воздействует переменная, в том числе нулевая, нагрузка. Причем, чем меньше нагрузка на выходном валу, тем больше осевое усилие на оператора, а при нулевой нагрузке на выходном валу осевое усилие на оператора максимально и равно разжимающему действию пружины. Поэтому оператор вынужден работать с переменным осевым усилием, зависящим от величины нагрузки. В результате снижается удобство пользования устройством ручного управления, приводящее к снижению безопасности работы с устройством. Кроме того, оператор вынужден осуществлять введение стопорящего элемента в карман выступа интуитивно ввиду отсутствия непосредственной конструктивной связи стопорящего элемента с выступом втулки, что дополнительно снижает удобство пользования устройством ручного управления.
Кроме того, отсутствие фиксации отключенного положения устройства ручного управления может привести к случайному включению указанного устройства, что снижает безопасность работы.
Таким образом, остается актуальной проблема безопасности и удобства работы оператора при эксплуатации устройства ручного управления.
Технический результат, на достижение которого направлено изобретение, заключается в повышении удобства пользования устройством ручного управления за счет исключения осевого усилия на оператора при работе с устройством ручного управления, вне зависимости от нагрузки на выходном звене исполнительного механизма, а также за счет обеспечения гарантированного перевода устройства во включенное положение.
Технический результат достигается тем, что устройство ручного управления исполнительным механизмом, как и ближайший аналог, содержит корпус, вал, маховик для вращения вала и ограничитель осевого перемещения вала, включающий в себя стопорящий элемент, неподвижно установленный на валу устройства, и втулку, снабженную карманами для размещения в указанных карманах стопорящего элемента в рабочем положении устройства ручного управления, при этом устройство ручного управления выполнено с возможностью кинематического соединения и разъединения с исполнительным механизмом при осевом перемещении вала устройства, и на валу устройства расположена пружина сжатия, установленная с возможностью сжатия при осевом перемещении вала устройства по направлению к исполнительному механизму.
В отличие от ближайшего аналога, втулка соосно установлена на валу устройства и снабжена поводковым отверстием, карманы выполнены в поводковом отверстии втулки, стопорящий элемент расположен внутри поводкового отверстия с возможностью перемещения стопорящего элемента в пределах поводкового отверстия, и на валу устройства между пружиной и втулкой соосно установлены фрикционные диски, один из которых неподвижно соединен со втулкой, а другой фрикционный диск неподвижно соединен с корпусом, при этом фрикционные диски установлены с возможностью сцепления и расцепления между собой.
Сущность изобретения поясняют чертежи.
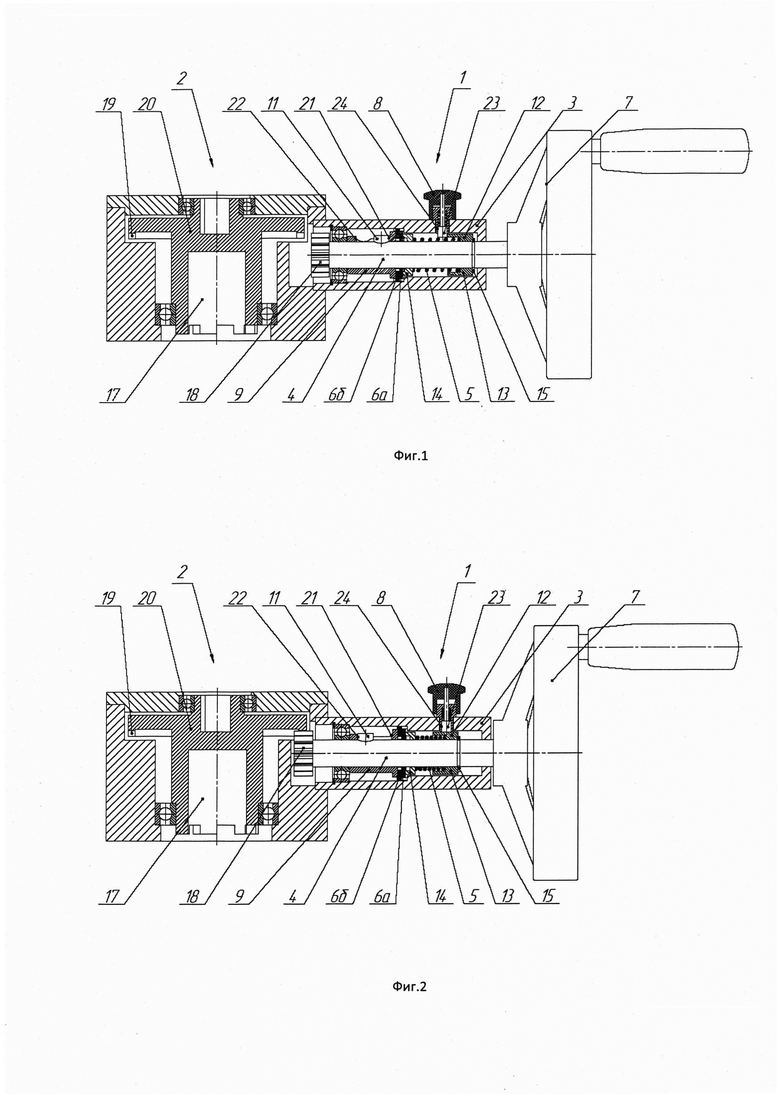
На фиг. 1 показано устройство ручного управления в отключенном положении. На фиг 2 показано устройство ручного управления во включенном положении. Фиг. 3 иллюстрирует расположение втулки на валу устройства ручного управления. На фиг. 4 показано расположение стопорящего элемента в поводковом отверстии втулки.
Устройство 1 ручного управления исполнительным механизмом 2 (см. фиг. 1 и 2) содержит корпус 3, вал 4, маховик 7 для вращения вала 4, пружину 5, фрикционные диски 6, фиксатор 8, а также ограничитель осевого перемещения вала 4, включающий в себя втулку 9 с поводковым отверстием 10 (фиг. 4) и стопорящий элемент 11. Втулка 9 соосно установлена на валу 4.
Фрикционные диски 6 с зазором (на фиг. не показан) между собой установлены соосно на валу 4 устройства между пружиной 5 и втулкой 9. Фрикционные диски 6 выполнены с возможностью обеспечения фрикционного сцепления между ними. Один из дисков 6б, сопряженный со втулкой 9, неподвижно соединен с указанной втулкой 9. Другой фрикционный диск 6а неподвижно соединен с корпусом 3. Пружина 5 сжатия соосно установлена на валу 4 с возможностью сжатия при осевом перемещении вала 4 устройства по направлению к исполнительному механизму 2. Сжатие пружины 5 обеспечено за счет упора пружины 5 в нажимное устройство 12 с одной стороны, и за счет упора в упорную шайбу 14 с другой стороны. Нажимное устройство 12 может быть выполнено в виде единой детали или в виде нажимной втулки 13, установленной с упором в стопор 15, неподвижно установленный на валу 4.
Стопорящий элемент 11 неподвижно установлен на валу 4 устройства и расположен внутри поводкового отверстия 10 (фиг. 4) с возможностью перемещения стопорящего элемента 11 в
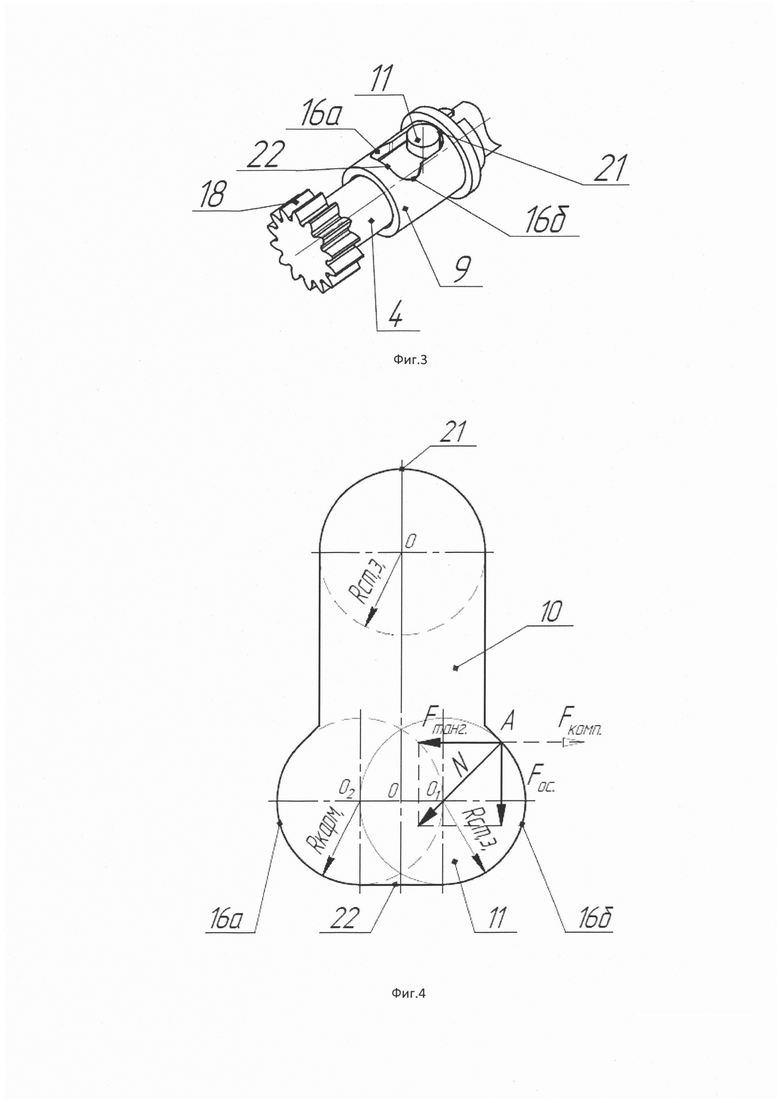
в пределах поводкового отверстия 10. Поводковое отверстие 10 со стороны исполнительного механизма 2 снабжено карманами 16а, 16б (фиг. 3-4). Карманы 16 в общем случае выполнены в виде криволинейных выемок такой геометрической формы и размеров, которые обеспечивают при сжатой пружине 5 возможность расположения стопорящего элемента 11 в кармане 16 с упором стопорящего элемента 11 в стенку кармана 16, а также обеспечивают при разжатии пружины 5 свободный выход стопорящего элемента 11 из кармана 16.
В предпочтительном варианте исполнения карманы 16 (фиг. 4) могут быть выполнены в виде скругленных радиусом (Rкapм.) выемок, стопорящий элемент 11 может быть выполнен в поперечном сечении в форме круга, имеющего радиус (Rcт.э.). При этом радиус стопорящего элемента (Rст.э.) выполнен меньше радиуса кармана (Rкарм.). И расстояние между центрами карманов O1O2 выполнено величиной больше ноля и меньше радиуса стопорящего элемента (Rcт.э.).
Устройство 1 ручного управления (фиг. 1-2) выполнено с возможностью кинематического соединения и разъединения с исполнительным механизмом 2 при осевом перемещении вала 4 устройства. Выходной вал 17 исполнительного механизма 2 кинематически соединен с трубопроводной арматурой (на фиг. не показана). Фиксатор 8 установлен радиально в отверстии 24 корпуса 3 с возможностью перемещения в указанном отверстии 24.
На фиг. 4 показано расположение стопорящего элемента 11 в поводковом отверстии 10 втулки.
Обозначения на фиг. 4:
N - сила, действующая на стопорящий элемент 11 в точке контакта (А), т.н. нормальная реакция опоры, где точка контакта (А) - точка касания стопорящего элемента 11 с карманом 16;
Foс. - осевая составляющая силы N;
Fтанг. - тангенциальная составляющая силы N;
Fкомп. - сила, компенсирующая тангенциальную составляющую силы N;
OO - ось поводкового отверстия 10, параллельная оси вала 4;
О1О2 - расстояние между центрами карманов 16а и 16б;
Rкарм. - радиус кармана 16;
Rcт.э. - радиус стопорящего элемента 11.
Устройство работает следующим образом.
В отключенном положении устройства 1 ручного управления (см. фиг. 1) вал 4 устройства перемещен в свое крайнее положение, противоположное исполнительному механизму 2, зубчатое колесо 18 на валу устройства выведено из зацепления с зубчатым колесом 19 на валу исполнительного механизма 2, кинематическая связь вала 4 устройства с валом 20 исполнительного механизма 2 отсутствует. Втулка 9 имеет возможность окружного перемещения на валу 4 и осевого перемещения на величину зазора между фрикционными дисками 6. Стопорящий элемент 11 на валу 4 устройства находится в своем крайнем положении, ближнем к маховику 7, с упором в первый торец 21 поводкового отверстия 10 втулки (см. фиг 3). Фиксатор 8 удерживает пружину 5 от сжатия за счет упора его стержня 23 в торец нажимной втулки 13, которая в свою очередь ограничена в перемещении по направлению к маховику 7 за счет упора в неподвижный стопор 15. Тем самым фиксатор 8 препятствует осевому перемещению вала 4 устройства по направлению к исполнительному механизму 2, фиксируя устройство 1 в отключенном положении, что предотвращает случайное включение устройства 1 ручного управления.
Для перевода устройства 1 во включенное положение образуют кинематическую связь между валом 4 устройства и валом 20 исполнительного механизма (см. фиг. 2). Для этого выводят фиксатор 8 из упора в торец нажимной втулки 13, освобождая вал 4 устройства от зафиксированного положения, и затем нажимают на маховик 7, осуществляя осевое перемещение вала 4 устройства по направлению к исполнительному механизму 2. При этом нажимная втулка 13 при упоре в стопор 15 воздействует на пружину 5, сжимая ее. Сжатая пружина 5 давит через шайбу 14 на фрикционные диски 6, которые сцепляются между собой силой фрикционного трения. На маховик 7 нажимают до тех пор, пока стопорящий элемент 11 на валу устройства не достигнет второго торца 22 паза втулки. Упор стопорящего элемента 11 во второй торец 22 паза втулки соответствует включенному положению устройства 1 ручного управления, при котором зубчатое колесо 18 на валу 4 устройства 1 введено в зацепление с зубчатым колесом 19 на валу исполнительного механизма 2, образуя между собой кинематическое соединение. Расположение стопорящего элемента 11 внутри поводкового отверстия 10 с возможностью перемещения стопорящего элемента 11 только в пределах поводкового отверстия 10 обеспечивает гарантированный перевод устройства 1 во включенное положение, что повышает удобство пользования устройством 1 ручного управления.
Затем вводят стопорящий элемент 11 в карман 16 поводкового отверстия втулки. Для этого, не прекращая нажимать на маховик 7, начинают поворачивать маховиком 7 вал 4. Стопорящий элемент 11 при повороте вала 4 перемещается вдоль второго торца 22 паза втулки, удерживаемой от поворота относительно корпуса 3 благодаря сцеплению фрикционных дисков 6. Втулка 9 удерживается от поворота относительно корпуса 3 силой фрикционного трения сцепленных дисков 6 и за счет того, что фрикционный диск 6а неподвижно соединен с корпусом 3, а фрикционный диск 6б неподвижно соединен со втулкой 9. В зависимости от направления поворота вала 4 стопорящий элемент 11 вводится в один из карманов 16 (фиг. 3-4) поводкового отверстия, например, в карман 16а или 16б. Расположение стопорящего элемента 11 в кармане 16 обеспечивает постоянную величину усилия, с которым сжатая пружина 5 воздействует на фрикционные диски 6.
Далее начинают вращать маховиком 7 вал 4. Стопорящий элемент 11 в кармане 16 поводкового отверстия втулки вращается вместе с валом 4 и втулкой 9 за счет проскальзывания фрикционных дисков 6 друг относительно друга. Втулка 9 вращается относительно корпуса 3 с постоянным крутящим моментом сопротивления, который обеспечен постоянной величиной усилия сжатой пружины 5, действующей на фрикционные диски 6. При этом на стопорящий элемент 11 в точке касания (А) действует нормальная реакция опоры (N) со стороны кармана 16 (см. фиг. 4). Воздействие осевой составляющей (Foc.) силы N на оператора отсутствует за счет упора стопорящего элемента 11 в стенку кармана 16 в точке касания (А). В результате осевое усилие на оператора от действия разжимающего усилия пружины отсутствует, вне зависимости от нагрузки на выходном валу 17. Тангенциальную составляющую (Fтанг) силы N оператор компенсирует своим усилием при вращении вала 4 в направлении, противоположном направлению действия компенсирующей составляющей (Fтанг) (см. Fкомп. на фиг. 4), поэтому стопорящий элемент 11 удерживается от выхода из кармана 16. При останове вращения вала 4 во время работы осевое усилие на оператора отсутствует за счет сцепленных фрикционных дисков 6 и упора стопорящего элемента 11 в стенку кармана 16 в точке касания (А), при этом оператор не отпускает маховик 7, компенсируя тангенциальную составляющую (Fтанг) силы N. При вращении маховика 7 вращательное движение передается по цепи: вал 4 устройства, зубчатое колесо 18 на валу устройства, зубчатое колесо 19 на валу исполнительного механизма 2, исполнительный механизм 2, выходной вал 17 исполнительного механизма, поворотный затвор трубопроводной арматуры (на фиг не показан), кинематически соединенный с выходным звеном (валом 17) исполнительного механизма.
Работа устройства 1 при переводе стопорящего элемента 11 из одного кармана 16 в другой, для смены направления вращения вала 4, аналогична вышеописанной работе при введении стопорящего элемента 11 в карман 16 отверстия втулки, при которой стопорящий элемент 11 перемещается вдоль второго торца 22 отверстия втулки 13, удерживаемой от вращения относительно корпуса 3 благодаря сцеплению фрикционных дисков 6.
Стержень 23 фиксатора 8 в рабочем положении устройства 1 самопроизвольно удерживается в отключенном положении за счет его упора в нажимную втулку 13, которая при сжатии пружины 5 перемещается в направлении исполнительного механизма 2 и закрывает отверстие 24 в корпусе 3. Непосредственного воздействия оператора на фиксатор 8 не требуется. Это позволяет обеими руками вращать маховик 7, что способствует облегчению ручного управления приводом, и повышает безопасность работы за счет фиксации отключенного положения устройства ручного управления.
После завершения работ отпускают маховик 7. Т.к. оператор не компенсирует тангенциальную составляющую (Fтанг. на фиг. 4), стопорящий элемент 11 выводится из кармана 16 за счет поворота вала 4 относительно втулки 9 и благодаря геометрической форме кармана 16 на его выходе (фиг. 4). Под действием разжимающейся пружины 5 вал 4 вместе с установленными на нем маховиком 7 и зубчатым колесом 18 возвращается в отключенное положение. Зубчатое колесо 18 и зубчатое колесо 19 разъединяются. Устройство 1 ручного управления отключается. Стержень 23 фиксатора перемещают до упора в торец нажимной втулки 13, что обеспечивает фиксацию отключенного положения устройства 1 ручного управления (фиг. 1).
Благодаря тому, что втулка 9 расположена на валу 4 устройства и вращается относительно корпуса 3 с постоянным крутящим моментом сопротивления, который обеспечен постоянной величиной усилия сжатой пружины 5, действующей на фрикционные диски 6, и неподвижное соединение одного из фрикционных дисков 6б со втулкой 9, а другого фрикционного диска 6а с корпусом 3 не позволяет втулке 9 провернуться относительно корпуса 3, при расположении стопорящего элемента 11 в кармане 16 поводкового отверстия втулки, воздействие осевого усилия на оператора отсутствует вне зависимости от нагрузки на выходном звене 17 исполнительного механизма 2.
Таким образом, предложенное устройство ручного управления исполнительным механизмом удобно и безопасно в использовании.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод с ручным дублером | 2019 |
|
RU2730750C1 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2008 |
|
RU2366848C1 |
| ПРИВОД КЛАПАНА КРАНОВОГО ТИПА И РУЧНОЙ ДУБЛЕР ПРИВОДА | 2000 |
|
RU2179681C2 |
| ЭЛЕКТРОПРИВОД ЗАПОРНОЙ АРМАТУРЫ | 2008 |
|
RU2364780C1 |
| ПРИВОД | 2000 |
|
RU2265764C2 |
| ГАСИТЕЛЬ КРУТИЛЬНЫХ КОЛЕБАНИЙ | 1999 |
|
RU2230954C2 |
| ПУСКОВОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО ГОРЕНИЯ | 1925 |
|
SU6352A1 |
| Двухкулачковый поворотный самоцентрирующий патрон | 1982 |
|
SU1013123A1 |
| СТАРТЕР | 2002 |
|
RU2296878C2 |
| КАТУШКА КЛИПС И СИСТЕМА РАЗМАТЫВАНИЯ КАТУШКИ КЛИПС | 2006 |
|
RU2387587C2 |
Изобретение относится к устройству ручного управления исполнительным механизмом и используется в качестве ручного привода для запорной и запорно-регулирующей трубопроводной арматуры. Устройство ручного управления исполнительным механизмом содержит корпус, вал, маховик для вращения вала и ограничитель осевого перемещения вала. Устройство ручного управления выполнено с возможностью кинематического соединения и разъединения с исполнительным механизмом при осевом перемещении вала устройства, и на валу устройства расположена пружина сжатия, установленная с возможностью сжатия при осевом перемещении вала устройства по направлению к исполнительному механизму. Ограничитель осевого перемещения вала включает в себя стопорящий элемент, неподвижно установленный на валу устройства, и втулку, снабженную карманами для размещения в указанных карманах стопорящего элемента в рабочем положении устройства ручного управления. Втулка соосно установлена на валу устройства и снабжена поводковым отверстием. Карманы выполнены в поводковом отверстии втулки. Стопорящий элемент расположен внутри поводкового отверстия с возможностью перемещения стопорящего элемента в пределах поводкового отверстия. На валу устройства между пружиной и втулкой соосно установлены фрикционные диски, один из которых неподвижно соединен со втулкой, а другой фрикционный диск неподвижно соединен с корпусом, при этом фрикционные диски установлены с возможностью сцепления и расцепления между собой. Техническим результатом является повышение удобства использования устройства ручного управления за счет исключения осевого усилия на оператора при работе с устройством, вне зависимости от нагрузки на выходном звене исполнительного механизма, а также за счет обеспечения гарантированного перевода устройства во включенное положение. 5 з.п. ф-лы, 4 ил.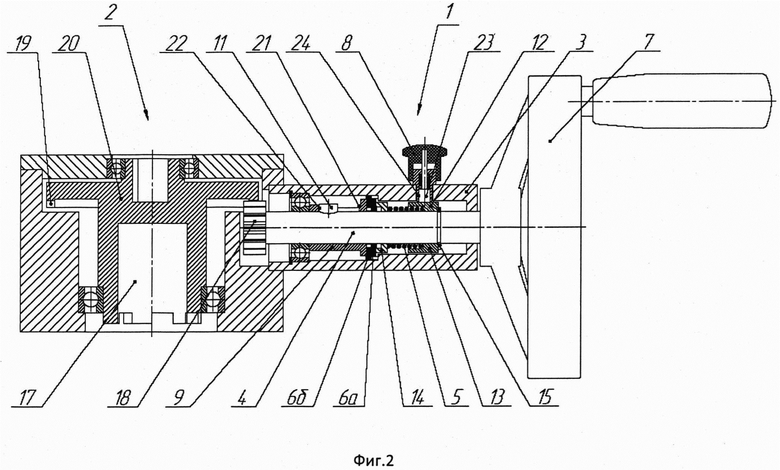
1. Устройство ручного управления исполнительным механизмом, содержащее корпус, вал, маховик для вращения вала и ограничитель осевого перемещения вала, включающий в себя стопорящий элемент, неподвижно установленный на валу устройства, и втулку, снабженную карманами для размещения в указанных карманах стопорящего элемента в рабочем положении устройства ручного управления, при этом устройство ручного управления выполнено с возможностью кинематического соединения и разъединения с исполнительным механизмом при осевом перемещении вала устройства, и на валу устройства расположена пружина сжатия, установленная с возможностью сжатия при осевом перемещении вала устройства по направлению к исполнительному механизму, отличающееся тем, что втулка соосно установлена на валу устройства и снабжена поводковым отверстием, карманы выполнены в поводковом отверстии втулки, стопорящий элемент расположен внутри поводкового отверстия с возможностью перемещения стопорящего элемента в пределах поводкового отверстия, и на валу устройства между пружиной и втулкой соосно установлены фрикционные диски, один из которых неподвижно соединен со втулкой, а другой фрикционный диск неподвижно соединен с корпусом, при этом фрикционные диски установлены с возможностью сцепления и расцепления между собой.
2. Устройство по п. 1, отличающееся тем, что карманы поводкового отверстия выполнены такой формы, которая обеспечивает возможность расположения стопорящего элемента в кармане с упором стопорящего элемента в стенку кармана, в рабочем положении устройства ручного управления.
3. Устройство по п. 1, отличающееся тем, что карманы поводкового отверстия выполнены такой формы, которая обеспечивает возможность вывода стопорящего элемента из кармана при переходе устройства ручного управления из рабочего положения в отключенное положение.
4. Устройство по п. 1, отличающееся тем, что на валу устройства ручного управления неподвижно установлено зубчатое колесо, на валу исполнительного механизма неподвижно установлено зубчатое колесо, зубчатый венец которого выполнен с возможностью кинематического соединения с зубчатым колесом на валу устройства при осевом перемещении вала устройства в направлении вала исполнительного механизма.
5. Устройство по п. 1, отличающееся тем, что устройство ручного управления снабжено фиксатором отключенного положения.
6. Устройство по п. 1, отличающееся тем, что сжатие пружины обеспечено за счет упора пружины со стороны маховика в нажимное устройство, и за счет упора пружины со стороны, противоположной маховику, в упорную шайбу.
| Защитное крепление колошниковой шахты доменных печей | 1937 |
|
SU56542A1 |
| Самосвальное транспортное средство | 1984 |
|
SU1209481A2 |
| ЭЛЕКТРОПРИВОД С РУЧНЫМ ДУБЛЕРОМ | 2002 |
|
RU2239116C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ СИСТЕМЫ, ПЕРЕДАЮЩЕЙ УСИЛИЕ С ПОМОЩЬЮ ФРИКЦИОННОГО СИЛОВОГО ЗАМЫКАНИЯ | 2017 |
|
RU2691907C1 |
| JP 2000145821 A, 26.05.2000. | |||

