Изобретение относится к транспортным средствам, способным перемещаться по вертикальным и наклонным поверхностям из различных материалов и имеющих разную структуру, и может быть использовано при проведении технологических операций в труднодоступных местах и выполнения работ, связанных с повышенной опасностью.
Известны способы перемещения по вертикальным поверхностям и устройства для их реализации, использующие для удержания на поверхности силы магнитного «сцепления», например, по патенту РФ 2481997 (B62D 57/024, 2008). Недостатком таких устройств является необходимость наличия ферромагнитных свойств материала опорной поверхности перемещения.
Известны способы перемещения по вертикальным поверхностям и устройства для их реализации, использующие вакуумные присоски для удержания на поверхности, например, по патентам РФ 2042559 (B62D 57/032, 1992), РФ 22667434 (B62D 57/032, B62D 57/024, 2006), RU 30113 ПМ (B25J 15 D/06, B62D 57/032, 2003), RU 32080 ПМ (B62D 57/032, 2002). Эти решения требуют наличия в своем составе систем создания вакуума и воздухораспределения, а также сложных приводных механизмов последовательного перемещения вакуумных присосок с созданием и снятием вакуума в них в соответствии с алгоритмом перемещения присосок. Кроме того, опорная поверхность должна иметь структуру, позволяющую создать достаточный вакуум под присоской, т.е. не должна быть пористой и не должна иметь канавок.
Наиболее близким к заявляемым техническим решениям являются способ перемещения по вертикальным и наклонным поверхностям и транспортное устройство для его реализации, предусматривающее размещение на своих контактных поверхностях специального материала с внешним адгезивным слоем, описанное в публикации Kathryn Daltorio et.al. А Robot that Climbs Walls using Micro-structured Polymer Feet // 8th International Conference on Climbing and Walking Robots (CLAWAR '05), London, UK, September 2005, DOI: 10.1007/3-540-26415-9_15. Более подробную информацию об использованном материале с внешним адгезивным слоем, образованным равномерно распределенным по поверхности множеством ворсинок микронного (субмикронного) размеров, что обеспечивает сцепление устройства с опорной поверхностью за счет вандерваальсовых сил межмолекулярного взаимодействия между ворсинками и опорной поверхностью, можно найти в публикации Gorb S N, Sinha М, Peressadko А, Daltorio К A, Quinn R D. Insects did it first: A micropatterned adhesive tape for robotic applications. Bioinspiration & Biomimetics, 2007, 2, S117-S125.
Способ перемещения по опорной поверхности состоит в последовательном прикреплении опор транспортного устройства к опорной поверхности перемещения за счет адгезивного сцепления и отлипания циклически сменяемых контактных поверхностей опор. Транспортное устройство включает корпус с двумя парами приводных соосных барабанов с установленными на каждом из них четырьмя опорами, выполненными в виде упругих лент, на контактных поверхностях которых размещен адгезивный слой. При вращении барабанов происходит последовательное прикрепление следующих по ходу движения лент за счет сцепления увеличивающихся по мере движения их контактных поверхностей и постепенного отлипания предыдущих контактирующих лент.
Недостатками данного способа перемещения по вертикальным и наклонным поверхностям и устройства для его реализации является то, что с опорной поверхностью последовательно контактируют одни и те же ленты, что приводит к постепенному загрязнению адгезивного слоя и ослаблению сил сцепления вплоть до их полного исчезновения. В то же время в описанном способе и устройстве не в полной мере используется потенциал сил сцепления, так как известно, что для получения максимальной силы сцепления необходим прижим контактирующих поверхностей с заданной интенсивностью а у описанного транспортного устройства такой прижим отсутствует, что приводит к снижению фактической грузоподъемности устройства по отношению к потенциально возможной. При этом получение материала с описанным адгезивным слоем является сложным, относительно дорогим и трудоемким технологическим процессом, выполняемым на целом ряде уникальных специализированных установок, объединенных в технологическую цепочку.
Целью изобретения является создание нового способа перемещения по вертикальным и наклонным поверхностям, обеспечивающего расширение спектра материалов опорных поверхностей, по которым возможно перемещение, повышение удельной грузоподъемности и создание конструкции транспортного устройства, реализующей предложенный способ.
Указанная цель достигается тем, что в предлагаемом способе контакт с вертикальной или наклонной опорной поверхностью осуществляют клейкими лентами, которые непрерывно разматывают в процессе перемещения с установленных на каждой опоре предлагаемого транспортного устройства рулонов на приводные катушки с индивидуальными электроприводами, за счет чего обеспечивается движение опор по поверхностям перемещения. Участок ленты между рулоном и приводной катушкой клейкой стороной контактирует с опорной поверхностью, а второй стороной контактирует с подвижной опорой транспортного устройства, при этом опора по мере движения периодически прижимается к опорной поверхности через клейкую ленту. Транспортное устройство для реализации предложенного способа содержит не менее трех опор, каждая из которых содержит пассивную катушку с установленным на ней рулоном клейкой ленты, приводную катушку, размещенную на некотором расстоянии от рулона, и опоры качения, контактирующие с клейкой лентой и расположенные между рулоном и катушкой. Кроме того, транспортное средство содержит прижимной механизм, выполняющий периодический прижим каждой из опор к поверхности перемещения через клейкую ленту.
Предложенный способ перемещения, выполняющий прокатку опор качения по клейкой ленте путем сматывания ее с рулона обеспечивает однократное сцепление набегающего чистого контактирующего участка ленты с загрязняющей опорной поверхностью, что вместе с выполнением периодической процедуры прижима каждой из опор качения к поверхности перемещения через клейкую ленту создает условия для реализации максимальных величин тангенциальной и нормальной компонент силы сцепления, препятствующих соответственно сдвигу и отрыву транспортного устройства под действием собственного веса, что повышает грузоподъемность устройства.
Промышленная применимость устройства достигается в том числе за счет использования в качестве адгезивного материала общедоступной клейкой ленты.
Сущность изобретения поясняется следующими рисунками и чертежами.
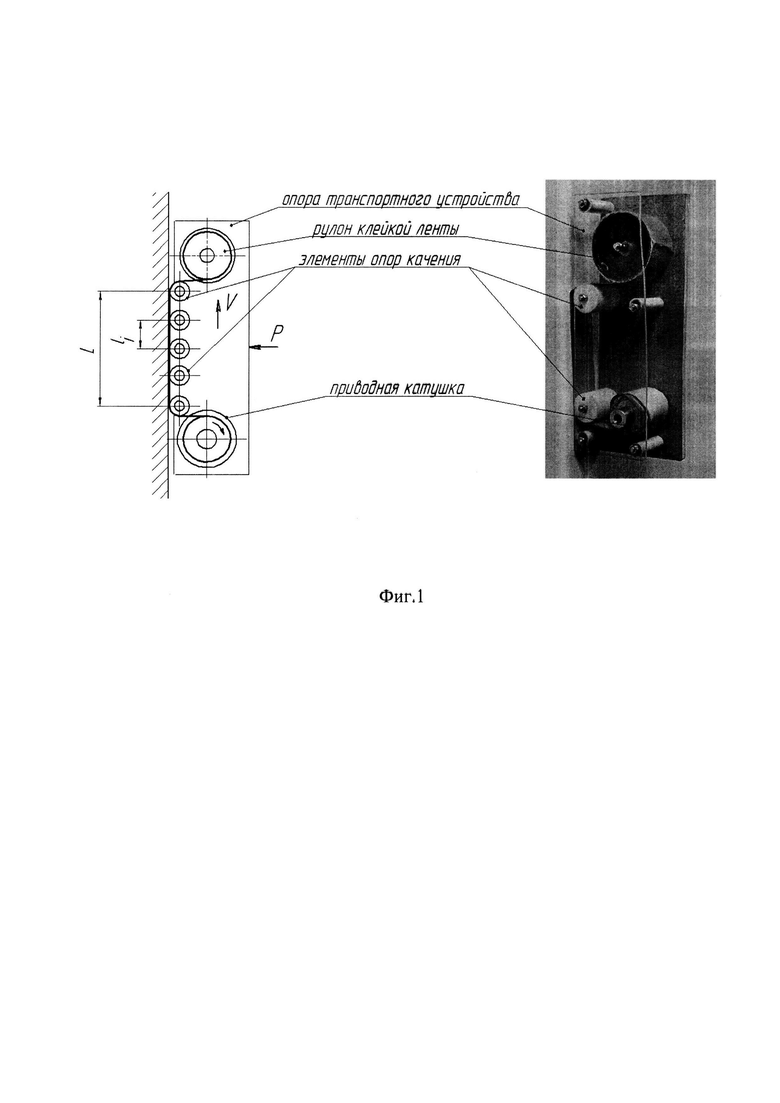
На фиг. 1 показана схема реализации способа перемещения.
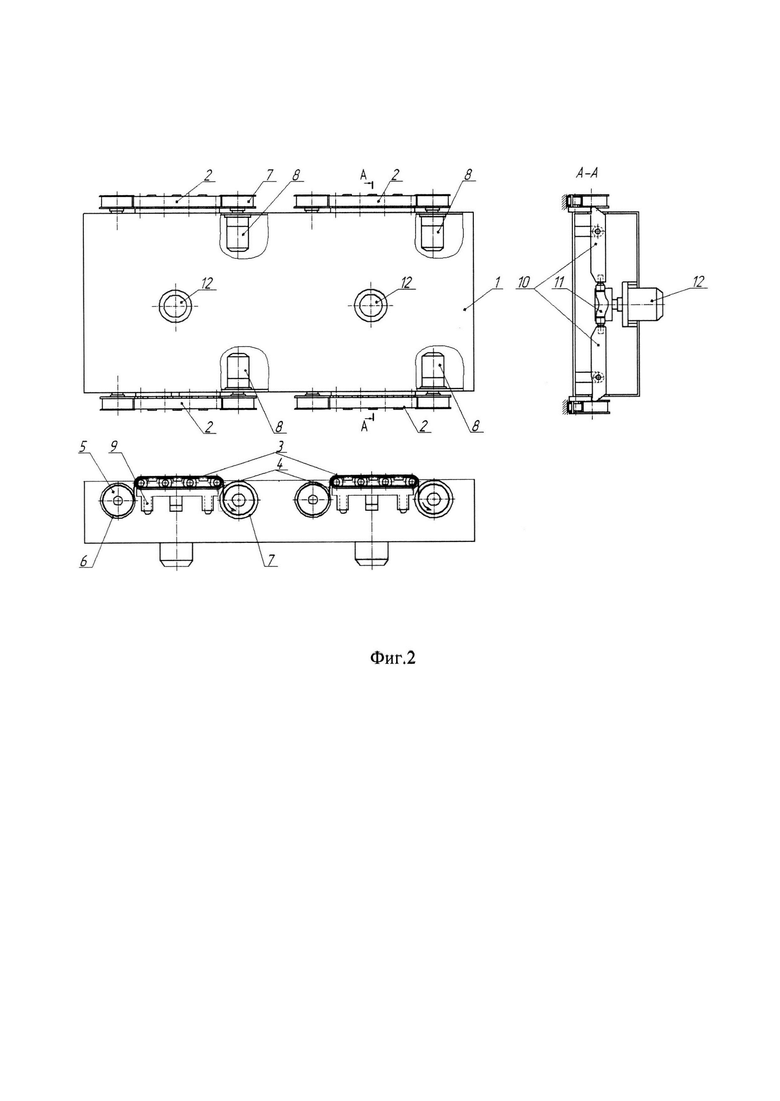
На фиг. 2 показана конструктивная схема четырехопорного варианта исполнения транспортного устройства для реализации предложенного способа.
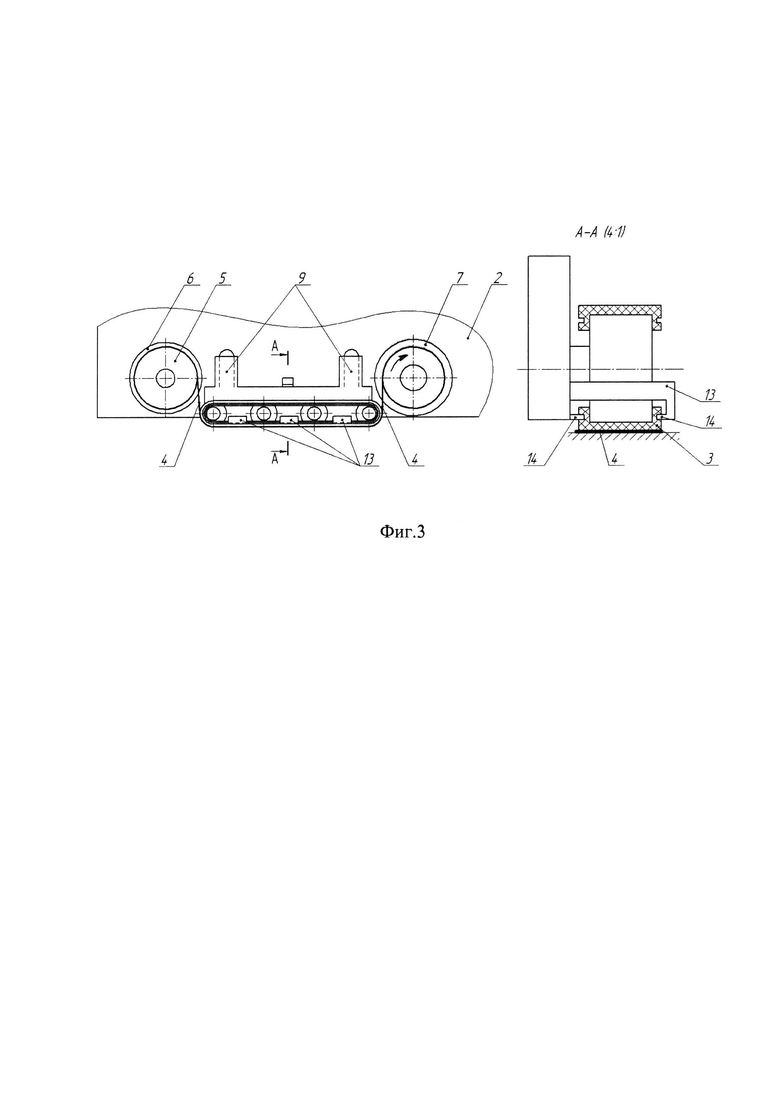
На фиг. 3 показана опора транспортного устройства с элементами опор качения в гусеничном варианте исполнения.
Предложенный способ перемещения отдельной опоры транспортного устройства поясняется на схеме реализации способа, фиг. 1. На вертикальную или наклонную опорную поверхность прикрепляют опору транспортного устройства, содержащую элементы опор качения, рулон клейкой ленты и приводную катушку с индивидуальным электроприводом. При наматывании клейкой ленты на приводную катушку происходит перемещение опоры со скоростью V, равной окружной скорости вращающейся катушки на радиусе намотки клейкой ленты. Периодически опору прижимают к опорной поверхности через клейкую ленту с силой Р, вследствие чего элементы опор качения прижимают клейкую ленту к опорной поверхности. При этом сами элементы опор качения могут быть выполнены различным образом, формируя опоры качения, например, в виде ряда катков или гусеницы. Прижим опоры к поверхности возможно осуществить только в случае, если транспортное устройство имеет не менее трех опор и сила прижима Р меньше, чем суммарная сила удержания устройства другими опорами. Прижим опоры осуществляется с периодом, не превышающим промежуток времени, необходимый транспортному средству для перемещения на величину, равную не менее половины расстояния L между рулоном и приводной катушкой, а длительность прижима опоры должна быть не менее времени перемещения опоры на величину максимального из расстояний между элементами опор качения  . Настоящее условие обеспечивает прижим клейкой ленты на всем ее участке, контактирующем с опорной поверхностью.
. Настоящее условие обеспечивает прижим клейкой ленты на всем ее участке, контактирующем с опорной поверхностью.
Периодичность прижима зависит от выбранной грузоподъемности устройства, т.к. очевидно, что чем чаще осуществляется прижим, тем выше грузоподъемность. При этом минимальная суммарная сила удержания всех опор должна быть больше грузоподъемности всего транспортного устройства.
Очевидно, что предложенный способ использует адгезивную поверхность клейкой ленты только один раз, что обеспечивает постоянно высокую силу адгезивного сцепления.
Проведенные эксперименты показали, что сила отрыва ленты во много раз превосходит силу ее предварительного прижима на различных поверхностях контакта. Результаты экспериментов приведены в таблице 1.

Как показали эксперименты, в зависимости от свойств поверхности участок ленты площадью 30 см2 способен удерживать груз от 50 до 150 Н на отрыв и от 75 до 210 Н на сдвиг на вертикальной поверхности. Это позволяет при наличии трех и более опор в составе устройства получить транспортное средство значительной удельной грузоподъемности.
Для реализации способа предлагается четырехопорный вариант транспортного устройства (фиг. 2) с опорами качения, выполненными в виде гусениц. Устройство состоит из корпуса 1 на котором расположены четыре опоры 2, опорные элементы качения которых выполнены в виде гусениц 3, связанных через двусторонние клейкие ленты 4 с опорной поверхностью, при этом рулоны клейкой ленты 5 установлены на пассивных катушках 6. Свободные концы лент закреплены на приводных катушках 7 с индивидуальными электроприводами 8. В процессе движения ленты наматываются на соответствующие приводные катушки. Гусеницы 3 установлены на корпусе опор 2, которые имеют возможность перемещаться в направлении к опорной поверхности на направляющих 9. Корпуса опор 2 контактируют с рычагами 10, противоположный конец которых находится в зацеплении с кулачками 11, установленными на валах мотор-редукторов 12. Гусеничные опорные элементы 13 оснащены плоскими направляющими 14, входящими в боковые пазы гусениц 3.
Устройство работает следующим образом.
После установки на опорную поверхность транспортное устройство прижимают к ней, вследствие чего оно закрепляется на поверхности. Для осуществления перемещения транспортного устройства с помощью индивидуальных приводов синхронно вращают приводные катушки 7, на которые наматываются клейкие ленты 4. При этом клейкие ленты 4 сматываются с гусениц 3, обеспечивая продвижение транспортного устройства по опорной поверхности. По мере движения клейкие ленты сматываются с рулонов 5 и сцепляются с опорной поверхностью новыми чистыми участками, что обеспечивает высокую адгезию с опорной поверхностью с одной стороны и с поверхностью гусениц 3 со второй стороны клейкой ленты 4.
Периодически гусеничные опоры 2 поочередно прижимают к опорной поверхности через клейкую ленту 4 кулачковым механизмом в составе элементов 10, 11, 12. Плоские направляющие 14 связывают гусеницы и корпус опорных гусеничных элементов 2 и препятствуют отрыву гусениц от клейкой ленты и опорной поверхности перемещения.
Техническим результатом является повышение удельной грузоподъемности транспортного устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| КРЕПЛЕНИЕ МОДУЛЯ НА АВТОМОБИЛЬ И УНИВЕРСАЛЬНЫЙ ГУСЕНИЧНЫЙ МОДУЛЬ С ЭТИМ КРЕПЛЕНИЕМ | 2017 |
|
RU2652483C1 |
| Крепление универсального модуля на автомобиль | 2020 |
|
RU2739628C1 |
| ПОДВЕСНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2006 |
|
RU2302955C1 |
| СИСТЕМА ПОГРУЗКИ ГРУЗОВОГО АВТОМОБИЛЯ | 2019 |
|
RU2784834C2 |
| Ведущее колесо малогабаритного транспортного средства | 2018 |
|
RU2692956C1 |
| УСТРОЙСТВО ДЛЯ ОТРЕЗАНИЯ И ФИКСАЦИИ КРОМКИ ЛЕНТЫ | 2020 |
|
RU2742486C1 |
| УНИВЕРСАЛЬНЫЙ ГУСЕНИЧНЫЙ МОДУЛЬ | 2019 |
|
RU2705718C1 |
| СПОСОБ ОБРАБОТКИ РАБОЧЕЙ ПОВЕРХНОСТИ ГОЛОВКИ РЕЛЬСА НА РЕЛЬСОФРЕЗЕРНОМ СТАНКЕ И РЕЛЬСОФРЕЗЕРНЫЙ СТАНОК | 2001 |
|
RU2201318C2 |
| ГУСЕНИЦА | 2008 |
|
RU2373098C1 |
| НАПРАВЛЯЮЩИЙ ЭЛЕМЕНТ ХОДОВОГО ПУТИ | 2007 |
|
RU2354568C2 |
Изобретение относится к транспортным средствам, способным перемещаться по вертикальным и наклонным поверхностям. Способ перемещения по вертикальным и наклонным поверхностям, при котором сцепление с поверхностью осуществляют за счет нескольких опор, в каждой из которых наматывают клейкую ленту на приводимую во вращение катушку и сматывают ее с рулона при контакте липкой ленты с опорной поверхностью на участке между приводной катушкой и рулоном. Каждую из опор поочередно периодически прижимают к опорной поверхности, используя силу удержания устройства на поверхности прочими опорами. Периодичность прижима опоры выбирают меньшей, чем время разматывания ленты на участке между опорами. Достигается создание способа перемещения по вертикальным и наклонным поверхностям, обеспечивающего расширение спектра материалов опорных поверхностей, по которым возможно перемещение, и повышение удельной грузоподъемности. 3 ил., 1 табл.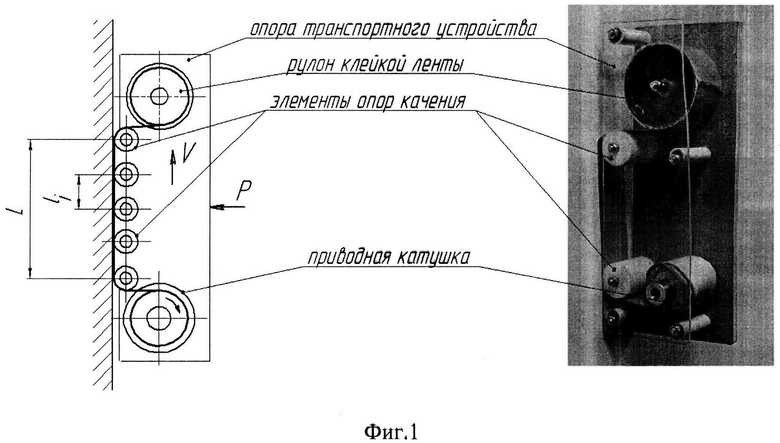
Способ перемещения по вертикальным и наклонным поверхностям, при котором сцепление с поверхностью осуществляют за счет нескольких опор, в каждой из которых наматывают клейкую ленту на приводимую во вращение катушку и сматывают ее с рулона при контакте липкой ленты с опорной поверхностью на участке между приводной катушкой и рулоном, отличающийся тем, что каждую из опор поочередно периодически прижимают к опорной поверхности, используя силу удержания устройства на поверхности прочими опорами, причем периодичность прижима опоры выбирают меньшей, чем время разматывания ленты на участке между опорами.
| УСТРОЙСТВО, ПОВЫШАЮЩЕЕ СЦЕПЛЕНИЕ КОЛЁС ТРАНСПОРТНОГО СРЕДСТВА С ДОРОГОЙ | 2015 |
|
RU2584757C1 |
| JP S63166668 A, 09.07.1988 | |||
| US 2010059298 A1, 11.03.2010 | |||
| CN 0108480331 A, 04.09.2018 | |||
| CN 103523108 A, 22.01.2014. | |||

