Изобретение относится к устройствам железнодорожной автоматики и телемеханики и обеспечивает автоматическое управление движением на железнодорожных переездах, позволяющим закрывать переезд в зависимости от координат, скорости и ускорения приближающегося поезда.
Известно устройство переездной сигнализации, содержащее включающее реле, источник питания, выход которого через ограничительное сопротивление и дроссель-трансформатор подсоединен к началу рельсовой линии, к релейному концу которой через дроссель-трансформатор подключено приемное реле, измерительный резистор, первый и второй аналого-цифровые преобразователи, блок вычисления скорости с двумя информационными и управляющим входами, к выходу которого подключено включающее реле, а к первому информационному входу подключен выход первого аналого-цифрового преобразователя, вход которого подключен параллельно измерительному резистору, включенному последовательно с ограничительным сопротивлением, к второму информационному входу блока вычисления скорости подсоединен выход второго аналого-цифрового преобразователя, вход которого подсоединен параллельно к первичной обмотке дроссель-трансформатора питающего конца рельсовой линии, а управляющий вход блока вычисления скорости через тыловой контакт приемного реле подключен к положительному потенциалу (патент RU 2169678 CI, B61L 23/18, B61L 29/22, опубл. 27.06.2001).
Недостатком данного устройства является низкая безопасность движения поездов из-за низкой точности определения фактической координаты закрытия переезда.
Известно устройство, реализующее способ управления автоматической переездной сигнализацией, содержащее источник питания, вход которого подключен к сети переменного тока, выход которого через датчик тока - к блоку согласования аппаратуры питающего конца рельсовой линии и к первому входу вычислительно-логического блока, ко второму входу которого подсоединен выход датчика тока, причем выход вычислительно-логического блока подсоединен к входу блока управления автоматической переездной сигнализацией, а выход блока согласования аппаратуры питающего конца подсоединен к рельсовой линии участка приближения, к релейному концу которой через блок согласования аппаратуры релейного конца подсоединен приемник рельсовой цепи (патент RU 2281219 CI, B61L 29/22, опубл. 10.08.2006).
В данном устройстве в память вычислительно-логического блока априорно записано уравнение определения координаты поезда при различных сопротивлениях изоляции и постоянном значении первичных параметров рельсовой линии, а именно: продольного сопротивления рельсовой линии, емкости между рельсами, а также ограничительного и нагрузочного сопротивлений рельсовой линии рельсовой цепи участка приближения.
Недостатком данного устройства является низкая безопасность движения поездов и автотранспорта из-за невысокой точности определения координаты поезда, а соответственно, и его скорости, из-за изменения первичных параметров рельсовых линий вследствие механических и климатических воздействий на них и нарушения соответствия вычисленных текущих координат поезда значениям фактических координат. Появляется ошибка, которая со временем увеличивается. Скорость, определенная при ошибочной координате неточная, и это приводит к неправильному определению фактической координаты закрытия переезда и нарушению безопасности движения на переезде.
Данное техническое устройство выбрано в качестве прототипа.
Техническим результатом, на достижение которого направлено данное изобретение, является повышение безопасности движения поездов и автотранспорта путем повышения точности определения текущей координаты поезда, посредством верификации вычисленной координаты поезда в текущий момент времени с координатой начала участка приближения фиксированной длины и корректировкой коэффициентов уравнения координаты поезда при вычислении координаты поезда.
Технический результат достигается тем, что в устройство управления переездной сигнализацией, содержащее источник питания, датчик тока, блоки согласования аппаратуры питающего и релейного концов, блок вычислительно-логический, блок управления автоматической переездной сигнализацией, приемник рельсовой цепи, дополнительно введены второй датчик тока, блок хранения коэффициентов уравнения, блок корректировки коэффициентов, блок сравнения с двумя выходами и двумя входами, один из которых подсоединен к выходу вычислительно-логического блока определения координаты поезда, другой - к выходу второго датчика тока, первый выход блока сравнения через блок корректировки коэффициентов подсоединен к блоку хранения коэффициентов уравнения, выход которого подсоединен к третьему входу вычислительно-логического блока определения координаты поезда, ко второму выходу блока сравнения подключен блок управления автоматической переездной сигнализацией, а второй датчик тока подключен между блоком согласования аппаратуры релейного конца и приемником рельсовой цепи.
Дополнительное введение второго датчика тока, блока хранения коэффициентов уравнения, блока корректировки коэффициентов, блока сравнения позволит повысить точность определения фактической координаты закрытия переезда за счет сравнения вычисленной координаты поезда с координатой участка приближения с последующей верификацией вычисленной координаты поезда в случае их неравенства.
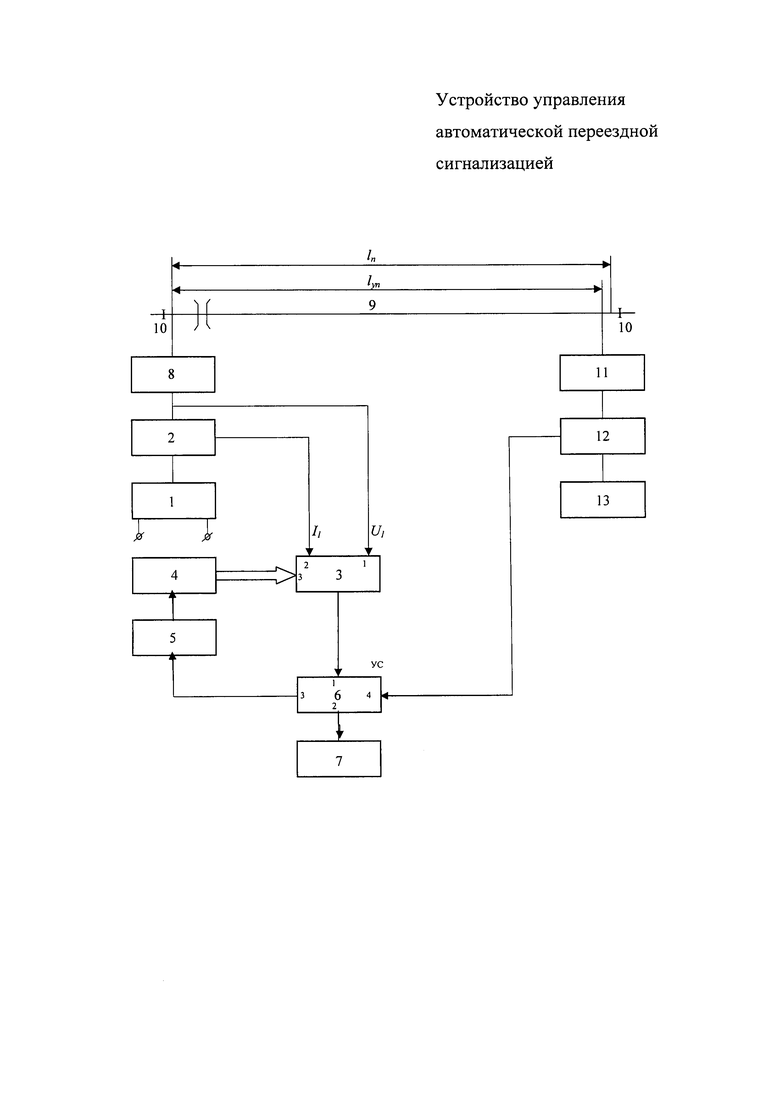
На фиг. представлена структурная схема устройства управления переездной сигнализацией.
Устройство содержит: источник питания 1, первый датчик тока 2, блок вычислительно-логический 3, блок хранения коэффициентов уравнения 4, блок корректировки коэффициентов 5, блок сравнения 6 с двумя выходами и двумя входами, блок управления автоматической переездной сигнализацией 7, блок согласования аппаратуры питающего конца 8, рельсовую линию 9, изолирующие стыки 10, блок согласования аппаратуры релейного конца 11, второй датчик тока 12, приемник рельсовой цепи 13.
Устройство управления переездной сигнализацией работает следующим образом.
При вступлении поезда на участок приближения (рельсовую линию 9, ограниченную изолирующими стыками 10) на релейном конце скачкообразно изменяется значение тока на релейном конце. Информация об этом изменении через блок согласования аппаратуры релейного конца 11 и второй датчик тока 12, соединенный с приемником рельсовой цепи 13, передается на вход 4 блока сравнения 6, где фиксируется информация о нахождении головы поезда на координате изолирующего стыка 10. Координата поезда непрерывно определяется в вычислительно-логический блоке 3 по сигналам о напряжении с входа блока согласования 8 аппаратуры приемного конца и о токе с первого датчика тока 2, который подключен к источнику питания 1.
В этот же момент времени вычислительно - логический блок 3, непрерывно измеряющий амплитуды напряжения U1 и тока U2 на питающем конце рельсовой линии, вычисляет текущую координату поезда в момент его вступления на участок приближения к переезду, и эта вычисленная координата поступает на первый вход блока сравнения 6, где сравнивается с фактической координатой головы поезда в самом начале участка приближения, информация о которой поступила в блок сравнения с четвертого входа. При неравенстве значений информация об этом поступает в блок корректировки коэффициентов 5, где корректируются коэффициенты уравнения при определении координаты поезда. Скорректированные значения коэффициентов уравнения определения координаты поезда поступают в блок хранения коэффициентов уравнения 4, сохраняются там до следующего изменения, а также передаются на третий вход вычислительно-логического блока 3, где по скорректированным коэффициентам определяют координату поезда. Корректировку производят до равенства вычисленной координаты поезда фактической координате. При достижении равенства вычисленной и фактической координат поезда в вычислительно-логическом блоке 3 вычисляется скорость поезда на участке приближения, циклически вычисляя текущие координаты поезда, а затем, с учетом возможного его ускорения, вычисляется фактическая координата закрытия переезда. Вычисленные значения передаются через блок сравнения 6 в блок управления автоматической переездной сигнализацией 7.
В предложенном устройстве управления переездной сигнализацией обеспечивается повышенная точность определения текущей координаты поезда, следовательно, и повышение безопасности движения поездов и автотранспорта, посредством верификации определенной уравнением вычисленной координаты поезда в текущий момент времени с координатой начала участка приближения фиксированной длины и корректировкой коэффициентов уравнения координаты поезда.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ СИСТЕМОЙ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИИ | 2019 |
|
RU2732685C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ | 2005 |
|
RU2281219C1 |
| Способ управления автоматической переездной сигнализацией | 2016 |
|
RU2628042C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИИ | 2000 |
|
RU2169678C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ | 2011 |
|
RU2487037C2 |
| СИСТЕМА УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ И СПОСОБ ЕЕ ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2756140C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ | 2021 |
|
RU2758627C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ | 2013 |
|
RU2526364C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ | 2013 |
|
RU2544285C1 |
| СИСТЕМА ЗАЩИТЫ ЖЕЛЕЗНОДОРОЖНЫХ ПЕРЕЕЗДОВ | 2013 |
|
RU2565159C2 |
Изобретение относится к области железнодорожной автоматики для управления переездной сигнализацией. Устройство включает источник питания, первый датчик тока, вычислительно-логический блок, блок хранения коэффициентов уравнения, блок корректировки коэффициентов, блок сравнения, блок управления автоматической переездной сигнализацией, блок согласования аппаратуры питающего конца, рельсовую линию с изолирующими стыками, блок согласования аппаратуры релейного конца, второй датчик тока и приемник рельсовой цепи. Достигается повышение безопасности движения. 1 ил.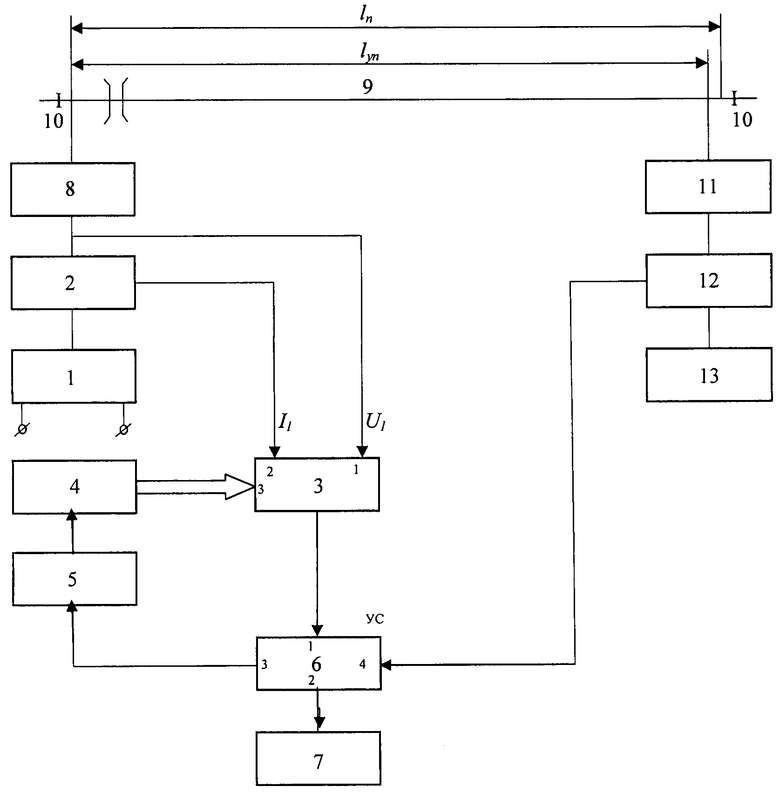
Устройство управления переездной сигнализацией, содержащее источник питания, датчик тока, устройства согласования аппаратуры питающего и релейного концов, вычислительно-логический блок с уравнением координаты поезда с заранее определенными коэффициентами, блок управления автоматической переездной сигнализацией, приемник рельсовой цепи, отличающееся тем, что в него дополнительно введены второй датчик тока, блок хранения коэффициентов уравнения, блок корректировки коэффициентов, блок сравнения с двумя выходами и двумя входами, один из которых подсоединен к выходу вычислительно-логического блока, другой к выходу второго датчика тока, первый выход блока сравнения через блок корректировки коэффициентов уравнения подсоединен к блоку хранения коэффициентов, выход которого подсоединен к третьему входу вычислительно-логического блока, ко второму выходу блока сравнения подключен блок управления автоматической переездной сигнализацией, а второй датчик тока подключен между блоком согласования аппаратуры питания релейного конца и приемником рельсовой цепи.
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИЕЙ | 2005 |
|
RU2281219C1 |
| Устройство для автоматического ограждения переезда | 1986 |
|
SU1342796A1 |
| ЦИФРОВАЯ ЖЕЛЕЗНОДОРОЖНАЯ СИСТЕМА ДЛЯ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ ПОЕЗДОВ, ПРИБЛИЖАЮЩИХСЯ К ПЕРЕЕЗДУ | 2004 |
|
RU2342274C2 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |

