Изобретение относится к области оценки транспортно-эксплуатационного состояния дорожных покрытий автомобильных дорог и прилегающих территорий.
Известно устройство для оценки состояния дорожного покрытия содержит микрофон, расположенный над дорожным покрытием, пьезоакустические акселерометры, размещенные на укрепленной части обочины дороги, и средства регистрации и обработки сигналов, включающие устройство нормализации информационного сигнала, подсоединенное к микрофону, преобразователь беспроводного интерфейса для приема сигнала от акселерометров, микропроцессор, и преобразователи стандартного цифрового интерфейса в формат front-end или в беспроводную сеть Wi-fi. Микрофон и средства регистрации и обработки сигналов могут быть размещены на опорах освещения или непосредственно в фонарях (плафонах) освещения.
Недостатком устройства является большая погрешность, зависимость от погодных условий, а также сложность аппаратуры.
Из известных наиболее близким по технической сущности является способ определения неровности поверхности покрытия дорожного полотна. Измеряют просветы под трехметровой рейкой и согласно изобретению устанавливают наземный лазерный сканер на станции на контролируемом участке дорожного полотна. Выполняют сканирование участка дорожного полотна со станции, в результате чего определяют координаты точек отражения лазерного луча от поверхности дорожного полотна; получают скан, выполняют вышеупомянутые действия на станциях, расположенных через 20-50 м вдоль оси дороги. Потом передают результаты сканирования (сканы) в ПЭВМ и с помощью специальной компьютерной программы регистрируют в ней сканы со всех станций и получают цифровую точечную трехмерную (3D) модель поверхности дорожного полотна, передают цифровую точечную трехмерную (3D) модель поверхности дорожного полотна в специальную компьютерную программу и получают цифровую векторную трехмерную (3D) модель поверхности дорожного полотна, в этой же программе виртуально моделируют вышеупомянутую трехметровую рейку и прикладывают ее к полученной цифровой векторной трехмерной (3D) модели поверхности дорожного полотна, поочередно и непрерывно вдоль запланированного направления, причем эта рейка должна соприкасаться с поверхностью дорожного полотна в двух крайних точках, каждый раз определяют просветы между виртуальной трехметровой рейкой и цифровой векторной трехмерной (3D) моделью поверхности дорожного полотна через заданные интервалы вдоль рейки и вычисляют неровность поверхности покрытия дорожного полотна по формуле.
Недостатком изобретения является длительность снятия скана, а также дороговизна станций, которые устанавливаются через 20-50 м.
Предлагаемое изобретение направлено на упрощение системы контроля поверхности, снижение скорости получения сканов и обработки результатов измерения.
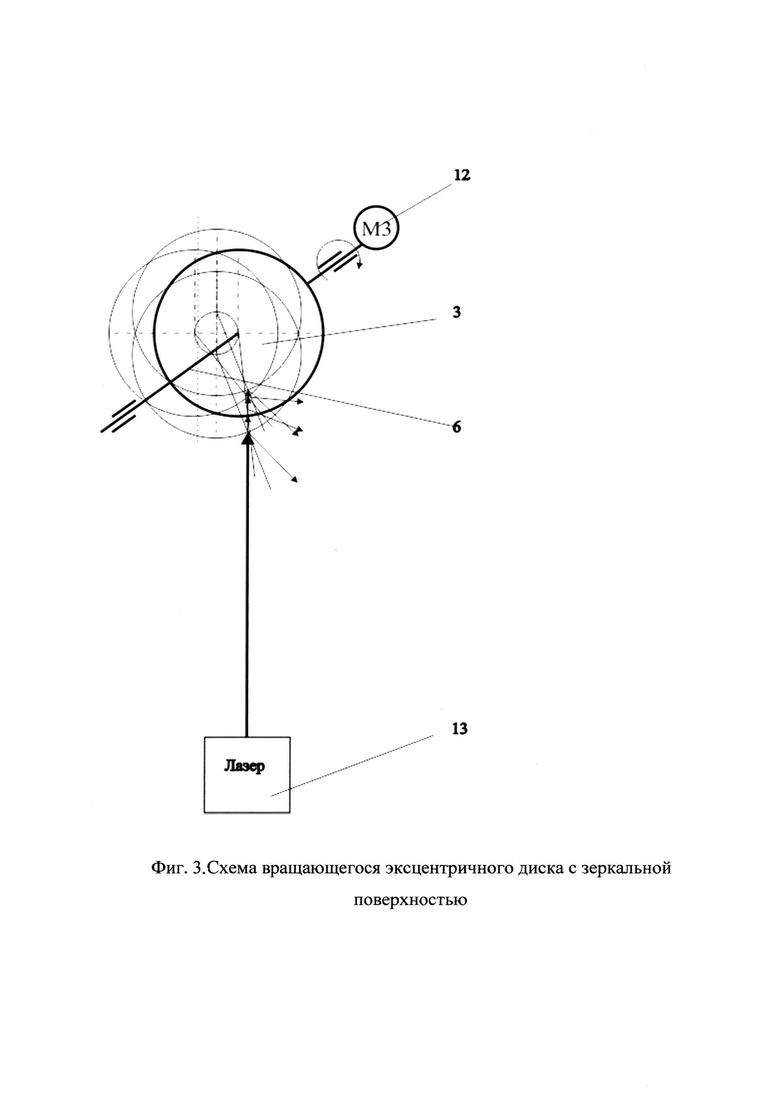
Технический результат достигается тем, что лазерный луч с помощью вращающегося эксцентричного диска с зеркальной поверхностью преобразуется в лазерный прожектор, способный охватывать значительно большую площадь, чем лазерный луч. Синхронно с ним вращается диск с приемным зеркалом, воспринимающим растровую картину отражения лазерного луча от сканируемой поверхности дороги. Вращение приемно-передающих устройств вокруг оси, с помощью двигателя, позволяет осматривать площадь с углом 360°. Кроме того сканирующее устройство с блоками обработки сигнала и записи устанавливается на квадрокоптере. Это позволяет оперативно сканировать любой участок дороги, заданной протяженности, а обработку осуществлять на станции, оснащенной компьютером со специальной программой получения 3D модели дорожного полотна и ее обработкой с получением необходимых параметров.
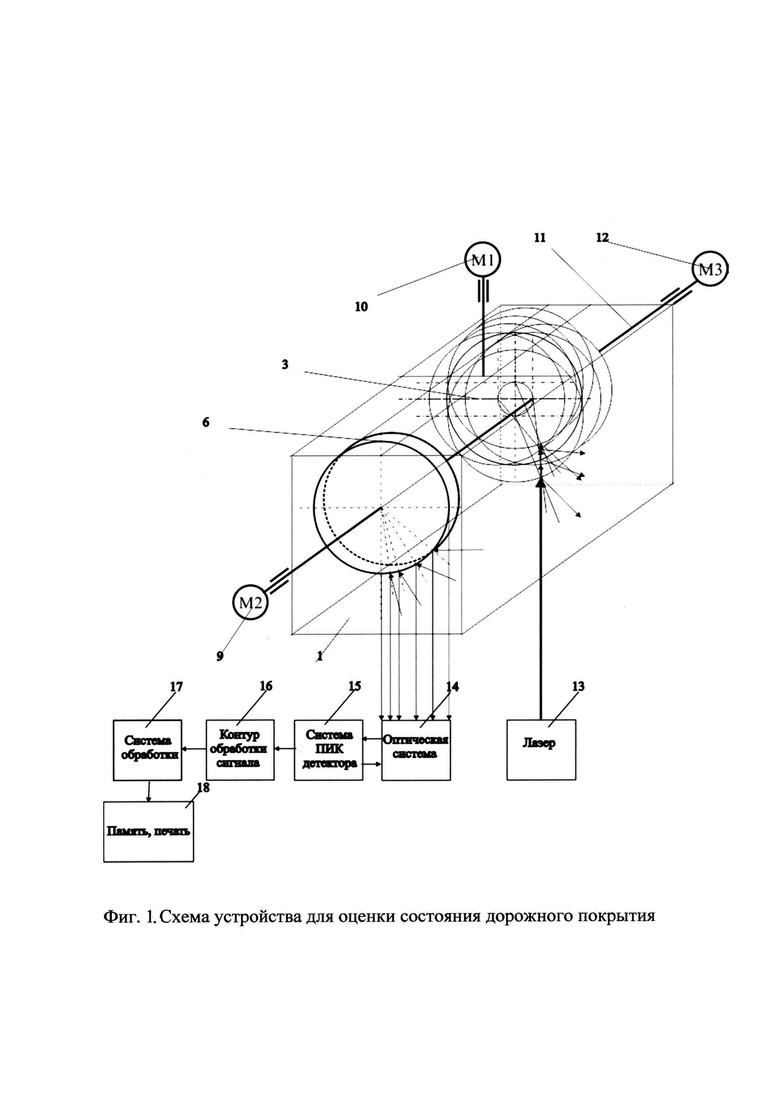
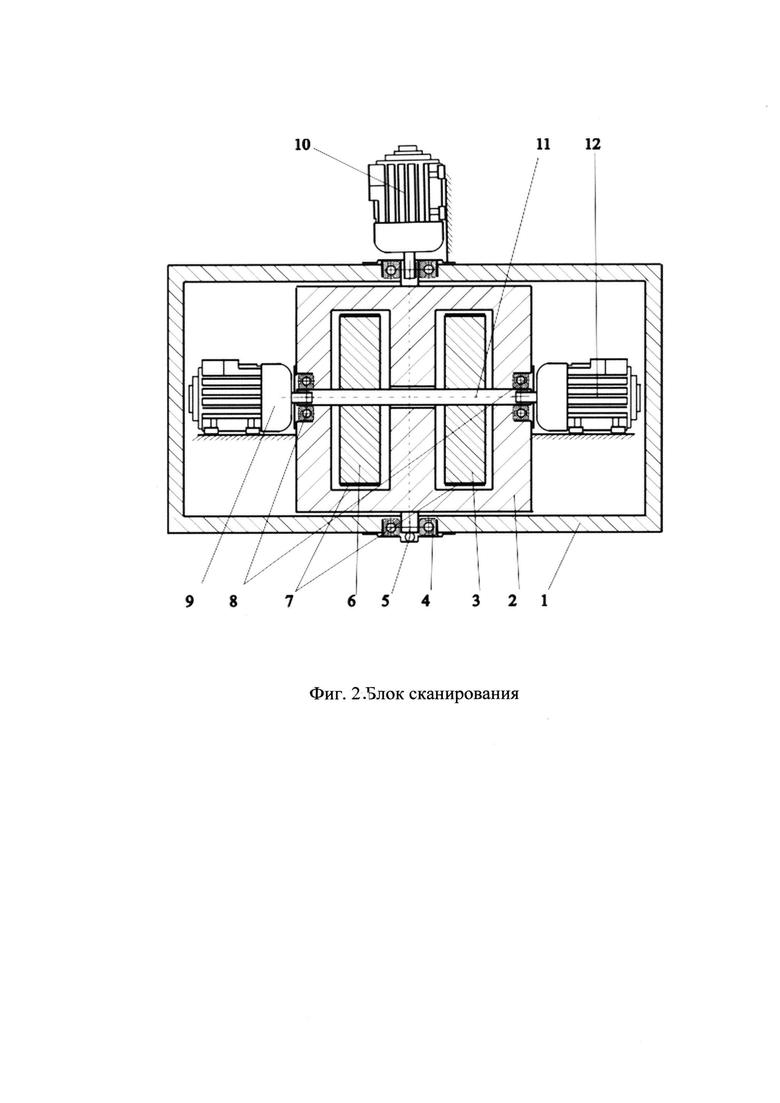
На фиг. 1 показана схема устройства для оценки состояния дорожного покрытия, на фиг. 2 блок сканирования, на фиг. 3 схема вращающегося эксцентричного диска с зеркальной поверхностью. Устройство для оценки состояния дорожного покрытия, состоящий из лазерного сканера и аппаратуры преобразования сигнала, в котором сканер состоит из корпуса 1 в котором размещена рамка 2 с вращающимися на подшипниках 8 дисками приемным 6 и передающим 3 лазерное излучение 13 с зеркальным покрытием 7, приводимые во вращение электрическими двигателями 9, 12, причем передающий диск 3 ассиметрично смещен относительно оси вращения (фиг. 3), а рамка 2 подвижно на подшипниках 4 закреплена в корпусе 1 устройства и приводится во вращение двигателем 10, информация снимаемая с приемного диска через оптическую систему 13, ПИК детектора 15, контур обработки сигнала 16, систему обработки 17 в цифровом виде записывается в память магнитного носителя 18.
Работает устройство следующим образом: лазерный луч 13 направлен на зеркальное покрытие 7 поверхности ассиметричного диска 3. Этот диск, вращаясь при помощи электродвигателей 9, 12 рассеивает лазерное излучение в определенном секторе, покрывая заданную длину траектории дороги. Вращение рамки 2 в корпусе 1 двигателем 10 позволяет анализировать поверхность дороги уже на площади основания конуса, образованным сектором лазерного излучения и поворотом этого излучения при повороте корпуса 1 двигателем 10. Отраженные от поверхности лучи лазера принимаются зеркальной поверхностью 7 приемного цилиндра 6, далее собирается оптической системой 14.
Предложенное устройство простое в устройстве и позволяет контролирования дороги на значительном удалении от станции обслуживания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕРОВНОСТИ ПОВЕРХНОСТИ ДОРОЖНОГО ПОЛОТНА | 2012 |
|
RU2509978C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПОВЕРХНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНОЙ ДОРОГИ ПО ЕЕ ГЕОМЕТРИЧЕСКИМ ПАРАМЕТРАМ | 2013 |
|
RU2526793C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОПЕРЕЧНОЙ РОВНОСТИ (КОЛЕЙНОСТИ) ПОВЕРХНОСТИ ДОРОЖНОГО ПОЛОТНА АВТОМОБИЛЬНОЙ ДОРОГИ | 2016 |
|
RU2625091C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГЕОМЕТРИЧЕСКИХ ЭЛЕМЕНТОВ АВТОМОБИЛЬНОЙ ДОРОГИ И ХАРАКТЕРИСТИК ПРИДОРОЖНОЙ ПОЛОСЫ | 2016 |
|
RU2614082C1 |
| Способ мониторинга дорожного полотна автомобильных дорог | 2021 |
|
RU2762538C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И НАПРАВЛЕНИЯ ОТКЛОНЕНИЯ НАРУЖНОГО КОНТУРА ДНИЩА РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ОТ ГОРИЗОНТАЛИ | 2015 |
|
RU2590342C1 |
| ЛАЗЕРНЫЙ ПРИБОР РАЗВЕДКИ | 2020 |
|
RU2755587C1 |
| МАШИНА ДЛЯ АВТОМАТИЗИРОВАННОЙ ДОРОЖНОЙ РАЗМЕТКИ | 2013 |
|
RU2535331C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ ОТКЛОНЕНИЯ ОБРАЗУЮЩИХ СТЕНОК РЕЗЕРВУАРА ВЕРТИКАЛЬНОГО ЦИЛИНДРИЧЕСКОГО ОТ ВЕРТИКАЛИ | 2014 |
|
RU2572502C1 |
| СПОСОБ ПОЛУЧЕНИЯ, ОБРАБОТКИ И ОТОБРАЖЕНИЯ ГЕОПРОСТРАНСТВЕННЫХ ДАННЫХ В ФОРМАТЕ 3D С ПРИМЕНЕНИЕМ ТЕХНОЛОГИИ ЛАЗЕРНОГО СКАНИРОВАНИЯ | 2015 |
|
RU2591173C1 |
Изобретение относится к области оценки транспортно-эксплуатационного состояния дорожных покрытий автомобильных дорог и прилегающих территорий. Устройство для оценки состояния дорожного покрытия состоит из лазерного сканера и аппаратуры преобразования сигнала. Сканер состоит из корпуса, в котором размещена рамка с вращающимися на подшипниках дисками, приемным и передающим лазерное излучение с зеркальным покрытием, приводимое во вращение электрическими двигателями. Передающий диск ассиметрично смещен относительно оси вращения, а рамка подвижно на подшипниках закреплена в корпусе устройства и приводится во вращение двигателем. Информация, снимаемая с приемного диска через оптическую систему, ПИК детектора, контур обработки сигнала, систему обработки в цифровом виде, записывается в память магнитного носителя. Предложенное устройство позволяет контролировать состояние дороги на значительном удалении от станции обслуживания. 3 ил.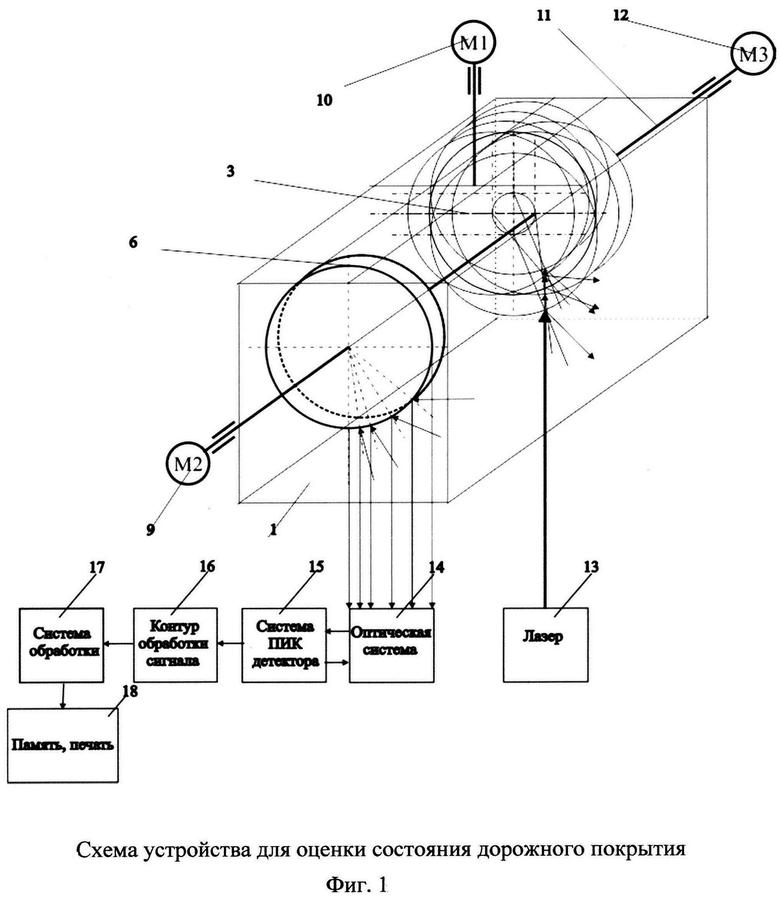
Устройство для оценки состояния дорожного покрытия, состоящее из лазерного сканера и аппаратуры преобразования сигнала, отличающийся тем, что сканер состоит из корпуса, в котором размещена рамка с вращающимися на подшипниках дисками, приемным и передающим лазерное излучение с зеркальным покрытием, приводимое во вращение электрическими двигателями, причем передающий диск ассиметрично смещен относительно оси вращения, а рамка подвижно на подшипниках закреплена в корпусе устройства и приводится во вращение двигателем. Информация, снимаемая с приемного диска через оптическую систему, ПИК детектора, контур обработки сигнала, систему обработки в цифровом виде, записывается в память магнитного носителя.
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПОВЕРХНОСТИ ПОКРЫТИЯ АВТОМОБИЛЬНОЙ ДОРОГИ ПО ЕЕ ГЕОМЕТРИЧЕСКИМ ПАРАМЕТРАМ | 2013 |
|
RU2526793C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ГЕОМЕТРИЧЕСКИХ ЭЛЕМЕНТОВ АВТОМОБИЛЬНОЙ ДОРОГИ И ХАРАКТЕРИСТИК ПРИДОРОЖНОЙ ПОЛОСЫ | 2016 |
|
RU2614082C1 |
| CN 104005325 B, 20.01.2016 | |||
| CN 102518029 A, 27.06.2012 | |||
| CN 109440612 A, 08.03.2019. | |||

