Данное изобретение относится к устройству для ориентации рыбы, при которой брюшные части или спинки расположены расположены заданным образом. Данное изобретение также относится к способу ориентации рыбы, при которой брюшные части или спинки рыбы расположены заданным образом.
Такие устройства и способы используются при автоматизированной обработке рыбы. Во время обработки рыбы для осуществления дальнейших этапов необходимо обеспечить одинаковую ориентацию рыбы, при которой брюшные части или спинки расположены одинаково. Рыбы вследствие геометрии их туловища обычно лежат на боковой стороне, но не отсортированы по положению их брюшной части и спинки. Для выполнения обработки рыбы в станциях обработки ниже по потоку необходимо обеспечить их одинаковое направление в заданной ориентации, при которой их брюшные части или спинки расположены одинаково.
Из уровня техники известно множество разных технических решений для обеспечения положения, при котором брюшные части или спинки расположены заданным образом. Некоторые решения основаны на использовании технологии оптических датчиков в сочетании с технологией пневматических исполнительных механизмов для того, чтобы сначала определить положение рыбы и в случае, если рыба еще не находится в правильном положении относительно заданной ориентации брюшной части или спинки, обеспечить поворот тех рыбин, которые находятся в неправильном положении, путем управляемого воздействия пневматическими исполнительными механизмами и расположить их в соответствии с требуемой ориентацией брюшной части или спинки. Такие системы ориентирования обычно являются сложными и дорогостоящими. Загрязнение оптических датчиков часто приводит к неисправностям и/или приводит к необходимости выполнения более частой очистки.
В основу других известных устройств и способов положено чисто механическое решение. Например, в опубликованном патентном документе DE 2102590 описаны способ и устройство для обеспечения ориентации рыбы так, что брюшные части или спинки расположены заданным образом, механическим путем. Воздействие на рыбу обеспечено с помощью упругого ролика, который благодаря форме его поперечного сечения обеспечивает асимметричное надавливание на каждую рыбу, в результате чего возникает составляющая силы, действующая на рыбу и обеспечивающая ее перемещение в направлении, при котором спинка оказывается в нужном положении.
Недостаток таких чисто механических устройств ориентации заключается в том, что, с одной стороны, рыбу подвергают высоким механическим нагрузкам, а, с другой стороны, такие устройства не очень надежны в работе для обеспечения правильной ориентации их брюшных частей или спинок, в частности при обработке рыбы низкого качества.
Таким образом, целью данного изобретения является создание устройства, которое является, насколько возможно, устойчивым к ошибкам, что гарантирует обеспечение ориентации рыбы, при которой ее брюшные части или спинки находятся в требуемом положении, с высокой степенью надежности. Целью изобретения также является создание устройства, которое обеспечивает ориентацию рыбы исключительно с помощью механических средств. Целью изобретения также является создание соответствующего способа.
Указанная цель достигается благодаря созданию устройства, обладающего вышеуказанными признаками, причем указанное устройство содержит первое транспортирующее средство, предназначенное для транспортирования рыбы головой вперед на боковых сторонах рыбы и имеющее загрузочный канал, который выполнен с возможностью направления рыбы в направлении транспортирования и имеет площадку, образующую первую плоскость транспортирования; по меньшей мере один направляющий ролик, расположенный на расстоянии от указанной площадки и выполненный с возможностью обеспечения позиционирования рыбы в загрузочном канале в требуемом положении в поперечном направлении, причем указанный ролик проходит по ширине загрузочного канала и имеет по меньшей мере одну секцию с поперечным сечением уменьшенного диаметра, при этом указанная площадка в центре указанного канала имеет передаточную выемку, расширяющуюся в направлении транспортирования и предназначенную для обеспечения перемещения рыбы под действием силы тяжести в направляющий канал, расположенный ниже первой плоскости транспортирования, путем ориентации рыбы согласно заранее заданному положению брюшной части или спинки, при этом направляющий канал имеет боковые направляющие поверхности, каждая из которых расположена под наклоном относительно первой плоскости транспортирования, и дополнительное, второе транспортирующее средство, образующее вторую плоскость транспортирования и выполненное с возможностью транспортирования рыбы на боковой стороне, при этом указанное второе транспортирующее средство расположено ниже по потоку от направляющего канала для приема рыбы на конце направляющего канала.
Преимущество устройства согласно данному изобретению заключается в том, что оно обеспечивает ориентацию рыбы с высокой степенью надежности для получения требуемого расположения их брюшной части или спинки, при этом без необходимости в использовании каких-либо сложных технологий, связанных с использованием датчиков или исполнительных механизмов. Устройство согласно данному изобретению выполнено абсолютно без каких-либо электрических компонентов и состоит исключительно из механических компонентов, что делает его чрезвычайно устойчивым к ошибкам. Благодаря комбинации направляющего ролика с указанной по меньшей мере одной секцией с поперечным сечением уменьшенного диаметра, передаточной выемки и направляющего канала вследствие типовой геометрии поперечного сечения туловища рыбы обеспечено автоматическое ориентирование рыбы, при котором брюшные части или спинки расположены заданным образом. Благодаря наличию направляющего ролика с по меньшей мере одной секцией, имеющей поперечное сечение уменьшенного диаметра, в загрузочном канале под действием минимальных направляющих усилий обеспечивается ориентация рыбы в направлении, поперечном направлению транспортирования, с последующим перемещением рыбы в направляющий канал по передаточной выемке, при этом указанные направляющие усилия не приводят к каким-либо повреждениям или деформации туловища рыбы.
Другой предпочтительный вариант выполнения данного изобретения отличается тем, что секция направляющего ролика с поперечным сечением уменьшенного диаметра расположена эксцентрично относительно центра загрузочного канала. Взаимодействие этого эксцентрично расположенного направляющего ролика с геометрией поперечного сечения рыбы приводит к тому, что рыба занимает разные положения в загрузочном канале в направлении, поперечном направлению транспортирования, в зависимости от того, направлена ли брюшная часть рыбы влево или вправо относительно направления транспортирования.
В соответствии с другим предпочтительным вариантом выполнения диаметр поперечного сечения направляющего ролика, начиная от секции с поперечным сечением уменьшенного диаметра, в каждом случае увеличивается в направлении наружных секций направляющего ролика. Благодаря профилю направляющего ролика преимущественно всегда обеспечивается ориентирование рыбы в направлении центра загрузочного канала по мере перемещения рыбы через загрузочный канал. Однако точное позиционирование рыбы в направлении, поперечном направлению транспортирования, как изложено выше, зависит от ориентации рыбы при ее поступлении в загрузочный канал.
Другой предпочтительный вариант выполнения данного изобретения отличается тем, что секция с поперечным сечением уменьшенного диаметра вместе с наружными секциями образует вогнутый наружный контур направляющего ролика. Вогнутый наружный контур образует по меньшей мере в целом ответную часть для геометрической формы поперечного сечения рыбы. Благодаря этому позиционирование рыбы в загрузочном канале в поперечном направлении в зависимости от ее положения обеспечивается с большой степенью надежности. В каждом случае в области наружных секций направляющий ролик предпочтительно имеет форму по меньшей мере в целом усеченного конуса. Таким образом, направляющий ролик предпочтительно имеет форму сдвоенного усеченного конуса.
Предпочтительный вариант данного изобретения отличается тем, что наружный контур выполнен без уступов. Благодаря этому поверхность контакта между направляющим роликом и рыбой является, насколько возможно, плоской, так что направляющие усилия действуют на рыбу в качестве поверхностной нагрузки без приложения значительных точечных нагрузок или нагрузок режущих кромок. Таким образом, обеспечено особенно бережное ориентирование рыбы в загрузочном канале в направлении, поперечном направлению транспортирования.
Другой предпочтительный вариант выполнения данного изобретения отличается тем, что направляющий ролик расположен с возможностью упругой установки. Преимущество такого решения заключается в том, что направляющий ролик автоматически упруго изгибается при перемещении через него рыбы различного размера, при этом усилия, действующие на рыбу, не превышают заданного максимального значения. Направляющий ролик предпочтительно выполнен с возможностью упругого изгибания под действием силы тяжести. Таким образом, прижимающее усилие, создаваемое направляющим роликом, может быть задано собственным весом указанного направляющего ролика. Как вариант, направляющий ролик выполнен с возможностью упругой установки на поворотном рычаге. В этом случае величина прижимающего усилия может быть отрегулирована за счет длины поворотного рычага, собственного веса направляющего ролика, с помощью дополнительных грузов, расположенных на поворотном рычаге, и/или за счет предварительного натяжения пружины.
В соответствии с другим предпочтительным вариантом выполнения данного изобретения по меньшей мере один из направляющих роликов расположен выше по потоку от передаточной выемки в направлении транспортирования. Таким образом, обеспечивается предварительное ориентирование рыбы в загрузочном канале относительно ее положения в направлении, поперечном направлению транспортирования, и перемещение рыбы к передаточной выемке в разных поперечных положениях в соответствии с исходным положением брюшной части или спинки.
В соответствии с другим предпочтительным вариантом выполнения данного изобретения по меньшей мере один из направляющих роликов расположен во входном участке передаточной выемки, в пределах которого ширина передаточной выемки меньше, чем в концевой части этой выемки. Таким образом, уже при поступлении рыбы во входной участок передаточной выемки обеспечивается требуемое направление рыбы относительно ее поперечного положения в загрузочном канале, что положительно влияет на надежность работы устройства согласно данному изобретению, при этом та доля рыбы, которые достигают направляющего канала с неправильной ориентацией их брюшной части или спинки, которая не соответствует заданному положению их брюшной части или спинки, сводится к минимуму.
В соответствии с другим предпочтительным вариантом выполнения данного изобретения наклоны боковых направляющих поверхностей направляющего канала в каждом случае будут разными. Благодаря разным наклонам боковых направляющих поверхностей направляющего канала обеспечен выборочный эффект, определяющий, будет ли рыба, проходящая через передаточную выемку, переворачиваться относительно положения ее брюшной части или спинки или же останется в имеющейся ориентации. Предпочтительное преимущество данного изобретения отличается тем, что загрузочный канал имеет по меньшей мере в целом треугольное поперечное сечение.
Другой целесообразный вариант выполнения данного изобретения отличается тем, что боковые направляющие поверхности направляющего канала расположены под наклоном так, что они образуют площадку направляющего канала, которая по меньшей мере по существу выровнена с секцией направляющего ролика, имеющей поперечное сечение уменьшенного диаметра. Такое решение дополнительно способствует вышеописанному выборочному эффекту данного изобретения. Благодаря указанному совместному действию, обеспечиваемому расположением площадки направляющего канала и секции направляющего ролика с поперечным сечением уменьшенного диаметра, рыбы, которые не прошли через загрузочный канал в требуемой заданной ориентации брюшной части или спинки, перемещаются, достигая передаточной выемки в положении с направленной вниз спинкой, через передаточную выемку в направляющий канал и направляются в нем с опорой на боковые направляющие поверхности направляющего канала так, что ориентация рыбы меняется относительно положения ее брюшной части или спинки.
Другой предпочтительный вариант выполнения данного изобретения отличается тем, что в каждом случае по бокам в загрузочном канале расположены отклоняющие элементы, которые в каждом случае проходят, начиная от боковых стенок загрузочного канала, в направлении передаточной выемки.
В соответствии с другим предпочтительным вариантом выполнения площадка загрузочного канала является неровной, при этом первое транспортирующее средство выполнено в виде вибрационного транспортера.
Кроме того, указанная цель достигается благодаря созданию соответствующего способа, который включает вышеуказанные признаки, причем предложенный способ включает следующие этапы: транспортирование рыбы головой вперед на их боковых сторонах посредством первого транспортирующего средства и загрузка рыбы в направлении транспортирования с помощью загрузочного канала, который имеет первую площадку, образующую первую плоскость транспортирования, причем на площадке по центру указанного канала выполнена передаточная выемка, расширяющаяся в направлении транспортирования; позиционирование рыбы в загрузочном канале в требуемом положении в поперечном направлении с помощью по меньшей мере одного направляющего ролика, расположенного на расстоянии от указанной площадки, причем указанный направляющий ролик проходит по ширине загрузочного канала и имеет по меньшей мере одну секцию с поперечным сечением уменьшенного диаметра; перемещение рыбы под действием силы тяжести в направляющий канал, расположенный ниже первой плоскости транспортирования, путем ориентации ее брюшной части или спинки в заданном положении, при этом направляющий канал имеет боковые направляющие поверхности, каждая из которых расположена под наклоном относительно первой плоскости транспортирования; и прием рыбы на конце направляющего канала посредством второго транспортирующего средства, образующего вторую плоскость транспортирования, и транспортирование рыбы на боковых сторонах рыбы посредством второго транспортирующего средства.
Предпочтительный вариант согласно данному изобретению отличается тем, что позиционирование рыбы в поперечном направлении посредством направляющего ролика обеспечивается благодаря тому, что направляющий ролик имеет секцию с поперечным сечением уменьшенного диаметра, при этом указанный направляющий ролик расположен эксцентрично относительно центра загрузочного канала.
В соответствии с другим предпочтительным вариантом выполнения согласно данному изобретению позиционирование рыбы в поперечном направлении обеспечивается посредством направляющего ролика в зависимости от положения брюшной части или спинки рыбы, при этом диаметр поперечного сечения направляющего ролика, начиная от секции с поперечным сечением уменьшенного диаметра, увеличивается в направлении наружных секций этого ролика.
Другой целесообразный вариант выполнения данного изобретения отличается тем, что позиционирование рыбы в поперечном направлении с помощью направляющего ролика обеспечивается посредством вогнутого наружного контура, который образован секцией с поперечным сечением уменьшенного диаметра и наружными секциями.
В соответствии с другим предпочтительным вариантом выполнения данного изобретения направляющий ролик упруго отклоняется под действием восстанавливающего усилия при позиционировании рыбы в поперечном направлении.
Другой целесообразный вариант выполнения данного изобретения отличается тем, что сначала ориентируют рыбу поперечно направлению транспортирования в загрузочном канале посредством направляющего ролика, а затем перемещают рыбу через передаточную выемку.
Другой целесообразный вариант выполнения данного изобретения отличается тем, что транспортируют рыбу посредством первого транспортирующего средства обеспечено путем вибрации.
Другие предпочтительные и/или целесообразные признаки и варианты выполнения данного изобретения раскрыты в зависимых пунктах формулы изобретения и в описании. Особенно предпочтительные варианты выполнения описаны более подробно со ссылкой на прилагаемые чертежи.
Группы фиг. 1-6 чертежей иллюстрируют конструкцию и режим работы предложенное в изобретении устройство, а также предложенный способ, при этом согласно примеру прохождения рыба при подаче в указанное устройство не имеет требуемой ориентации положения брюшной части или спинки, а при прохождении через указанное устройство обеспечивается поворот рыбы вокруг ее продольной оси так, что на выходе из устройства обеспечивается требуемая ориентация рыбы. Последующие пояснения основаны на допущении, что при требуемой ориентации брюшной части или спинки рыбы брюшная часть направлена влево относительно направления транспортирования, а спинка рыбы направлена вправо относительно направления транспортирования.
Каждая из указанных групп чертежей содержит по два или три вида, выполненных в каждом случае в разных ракурсах. Например, Фиг. 1а изображает вид сверху, когда рыба поступает в устройство согласно данному изобретению, Фиг. 1b изображает вид сбоку в направлении, противоположном направлению транспортирования, а Фиг. 1с изображает вид в аксонометрии в направлении транспортирования. Подобным образом, устройство согласно данному изобретению проиллюстрировано в группах Фиг. 2-6.
Группы Фиг. 8-14 чертежей изображают для сравнения предложенные устройство и способ при прохождении рыбы, которая уже находится в ориентации, когда ее брюшная часть или спинка находятся в требуемом положении, при поступлении в предложенное устройство.
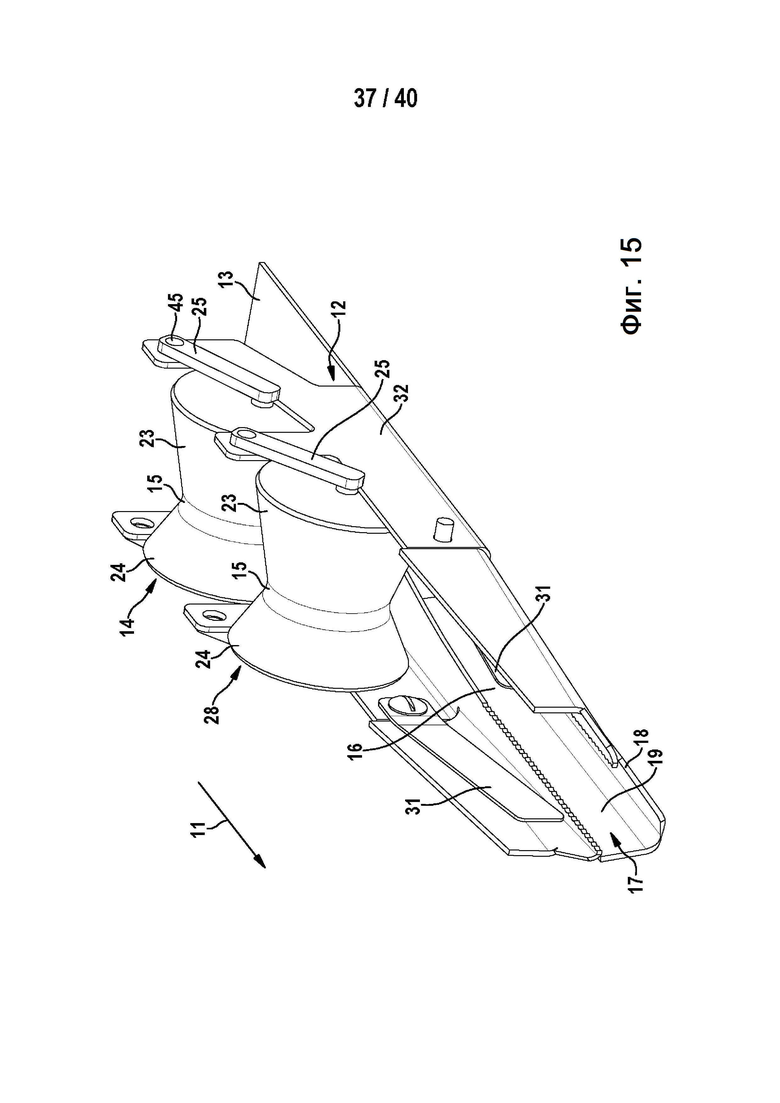
Фиг. 15 изображает вид в аксонометрии предложенного устройства в направлении, противоположном направлению транспортирования.
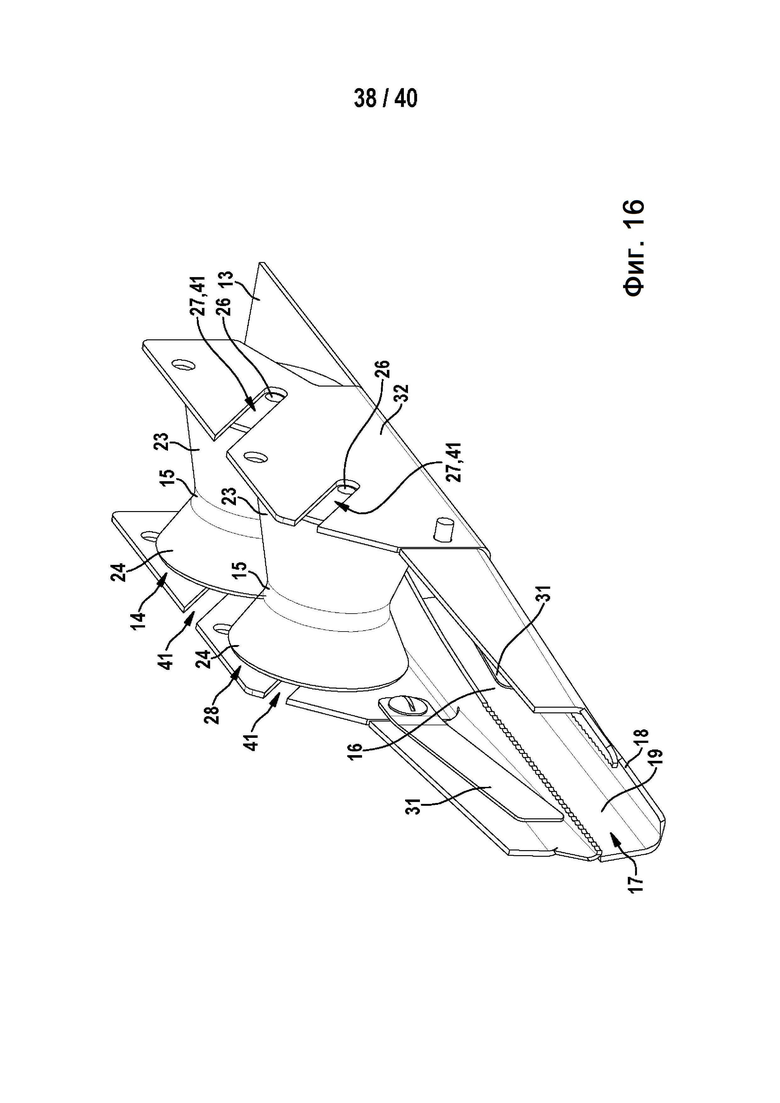
Фиг. 16 изображает устройство, показанное на Фиг. 15, в соответствии с альтернативным вариантом выполнения.
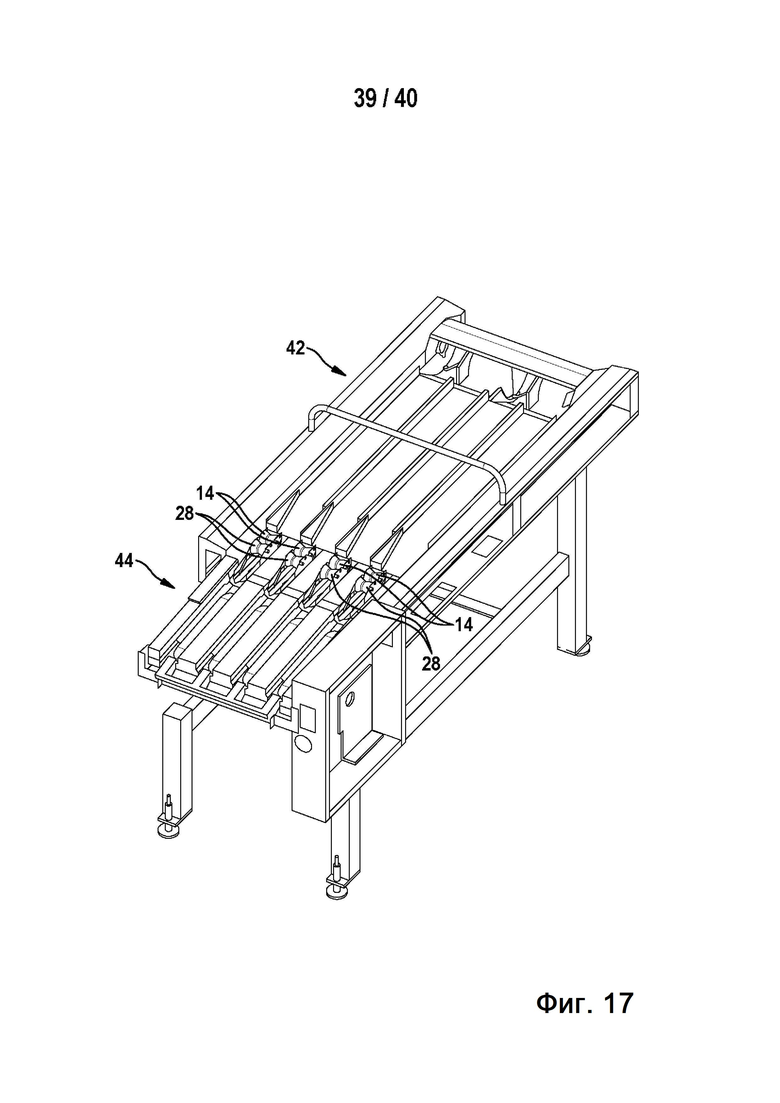
Фиг. 17 изображает вид в аксонометрии четырех устройств согласно данному изобретению, расположенных параллельно, при этом загрузочный блок расположен выше по потоку.
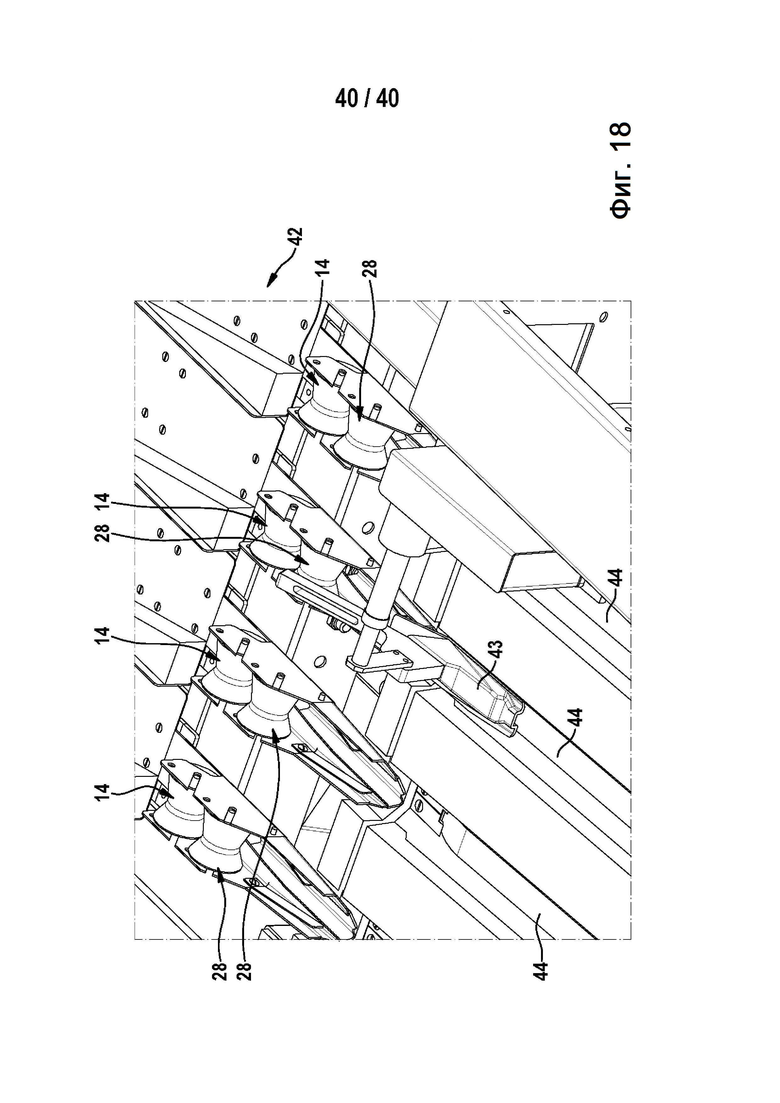
Фиг. 18 изображает увеличенный подробный вид фрагмента Фиг. 17.
Далее на основании чертежей приведено подробное описание устройства и способа согласно данному изобретению.
Далее приведено более подробное описание устройства согласно данному изобретению, изначально основанное на Фиг. 1а, 1b и 1с. Данное устройство содержит первое транспортирующее средство, предназначенное для транспортирования рыбы 10 головой вперед на их боковых сторонах с помощью загрузочного канала 12, обеспечивающего перемещение рыбы 10 в направлении 11 транспортирования, причем загрузочный канал имеет площадку 13, образующую первую плоскость транспортирования.
Над площадкой 13, на некотором расстоянии от нее расположен по меньшей мере один направляющий ролик 14. Направляющий ролик 14 выполнен с возможностью обеспечения поперечного расположения рыбы 10 в загрузочном канале 12. Направляющий ролик 14 проходит по ширине загрузочного канала 12. Направляющий ролик 14 имеет по меньшей мере одну секцию 15 с поперечным сечением уменьшенного диаметра.
Как показано на Фиг. 1а, на площадке 13 по центру указанного канала выполнена передаточная выемка 16, расширяющаяся в направлении 11. Выемка предназначена и выполнена с возможностью обеспечения перемещения рыбы 10 под действием силы тяжести в направляющий канал 17, расположенный ниже первой плоскости транспортирования. При перемещении рыбы 10 обеспечивается расположение, когда брюшная часть или спинка находится в заданном положении. Канал 17 имеет боковые направляющие поверхности 18, 19, каждая из которых расположена под наклоном относительно первой плоскости транспортирования.
Как показано на Фиг. 1b, секция 15 направляющего ролика 14, имеющая поперечное сечение уменьшенного диаметра, расположена эксцентрично относительно центра загрузочного канала. Другими словами, секция 15 расположена эксцентрично относительно оси симметрии загрузочного канала 12, проходящей в направлении транспортирования. Таким образом, ось симметрии загрузочного канала 12 не совпадает с секцией 15.
На Фиг. 1b показано, как диаметр поперечного сечения направляющего ролика 14, начиная от секции 15 с поперечным сечением уменьшенного диаметра, увеличивается в каждом случае в направлении наружных секций 21 направляющего ролика 14. Другим словами, ролик 14 в области секции 15 имеет уменьшенный диаметр по сравнению с наружными секциями 21. Таким образом, секция 15 вместе с наружными секциями 21 образует вогнутый наружный контур 22 ролика 14.
В области наружных секций 21 ролик 14 в каждом случае предпочтительно имеет форму по меньшей мере в целом усеченного конуса. Таким образом, ролик 14 по существу состоит из двух элементов 23, 24, имеющих форму усеченного конуса. Также предпочтительно наружный контур 22 выполнен без уступов.
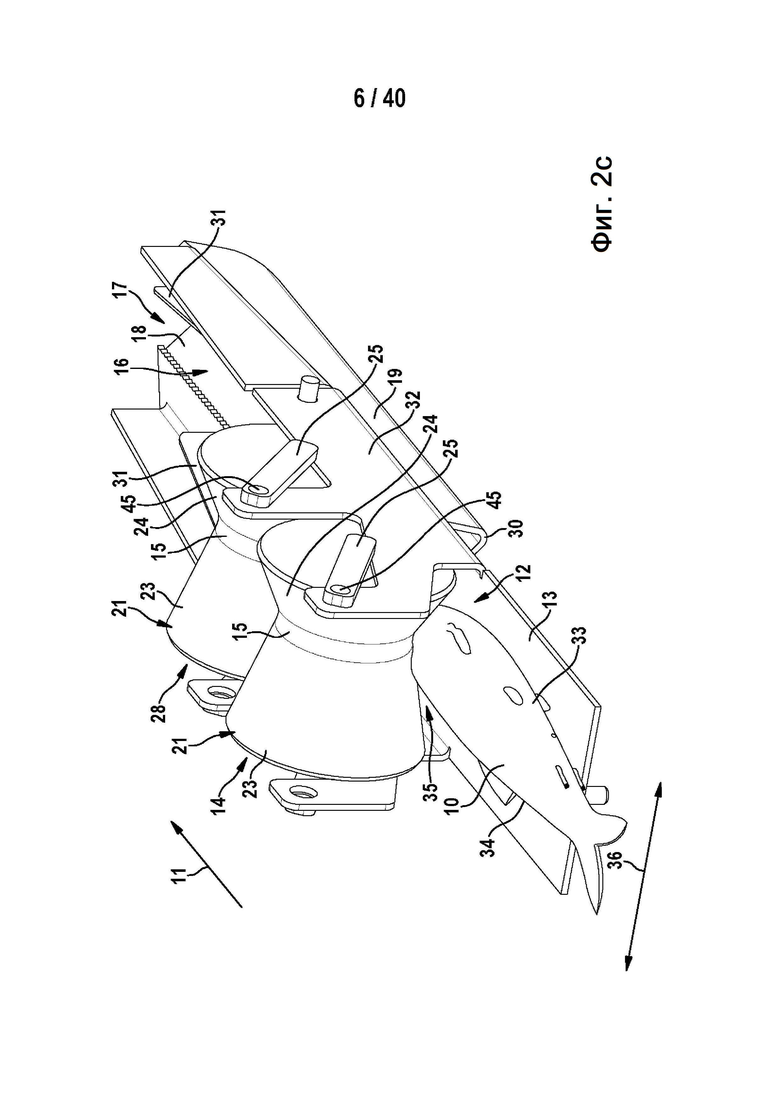
Как можно видеть на Фиг. 1с, ролик 14 расположен с возможностью упругой установки. Направляющий ролик 14 установлен с возможностью поворотного перемещения по обеим сторонам посредством рычагов 25. Рычаги 25 выполнены с возможностью поворота вокруг оси 45 поворота. Фиг. 16 изображает альтернативное устройство перемещения направляющего ролика 14. Ось вращения 26 ролика 14 установлена в каждом случае в вырезах 27, которые проходят под наклоном в направлении 11.
Количество направляющих роликов 14 не ограничено одним роликом. Как показано на чертежах, предпочтительно использовать дополнительный направляющий ролик 28. Конструктивные параметры дополнительного направляющего ролика 28 аналогичны параметрам, указанным в отношении направляющего ролика 14. Предпочтительно один из направляющих роликов 14 расположен выше по потоку от передаточной выемки 16 в направлении 11 транспортирования. Кроме того, предпочтительно по меньшей мере один из направляющих роликов 14 расположен во входном участке 29 передаточной выемки 16, в пределах которого передаточная выемка 16 имеет меньшую ширину по сравнению с шириной концевой части выемки 16.
Как показано на Фиг. 1b, наклон боковых направляющих поверхностей 18, 19 направляющего канала 17 в каждом случае предпочтительно является разным. Направляющий канал 17 имеет поперечное сечение по меньшей мере в целом треугольной формы. Кроме того, предпочтительно боковые направляющие поверхности 18, 19 направляющего канала 17 расположены под наклоном так, что они образуют площадку 30, которая по меньшей мере по существу выровнена с секцией 15 направляющего ролика 14, имеющей поперечное сечение уменьшенного диаметра.
Предпочтительно в каждом случае по бокам в загрузочном канале 12 расположены отклоняющие элементы 31, которые в каждом случае проходят, начиная от боковых стенок 32 загрузочного канала 12, в направлении передаточной выемки 16.
Преимущественно площадка 13 загрузочного канала 12 выполнена неровной, а первое транспортирующее средство выполнено в виде вибрационного транспортера. В результате совместного действия, оказываемого неровной поверхностью загрузочного канала 12 и вибрирующим перемещением транспортирующего средства в направлении 11 транспортирования, за счет чешуйчатого покрова рыбы 10 обеспечивается ее транспортирование через загрузочный канал 12 в направлении транспортирования.
Далее приведено описание режима работы устройства и способа согласно данному изобретению, изначально на основании групп Фиг. 1-6 чертежей, на которых показано прохождение рыбы, которая при поступлении в загрузочный канал 12 не имеет требуемой ориентации относительно положения ее брюшной части или спинки.
Как показано на Фиг. 1а, 1b и 1с, рыба 10 относительно направления 11 транспортирования имеет ориентацию, при которой ее брюшная часть 33 направлена вправо, а спинная часть 34 рыбы 10 направлена влево.
Для единообразия изложения далее во всех случаях ориентация рыбы 10 в соответствии с положением ее брюшной части или спинки будет указана относительно направления 11 транспортирования.
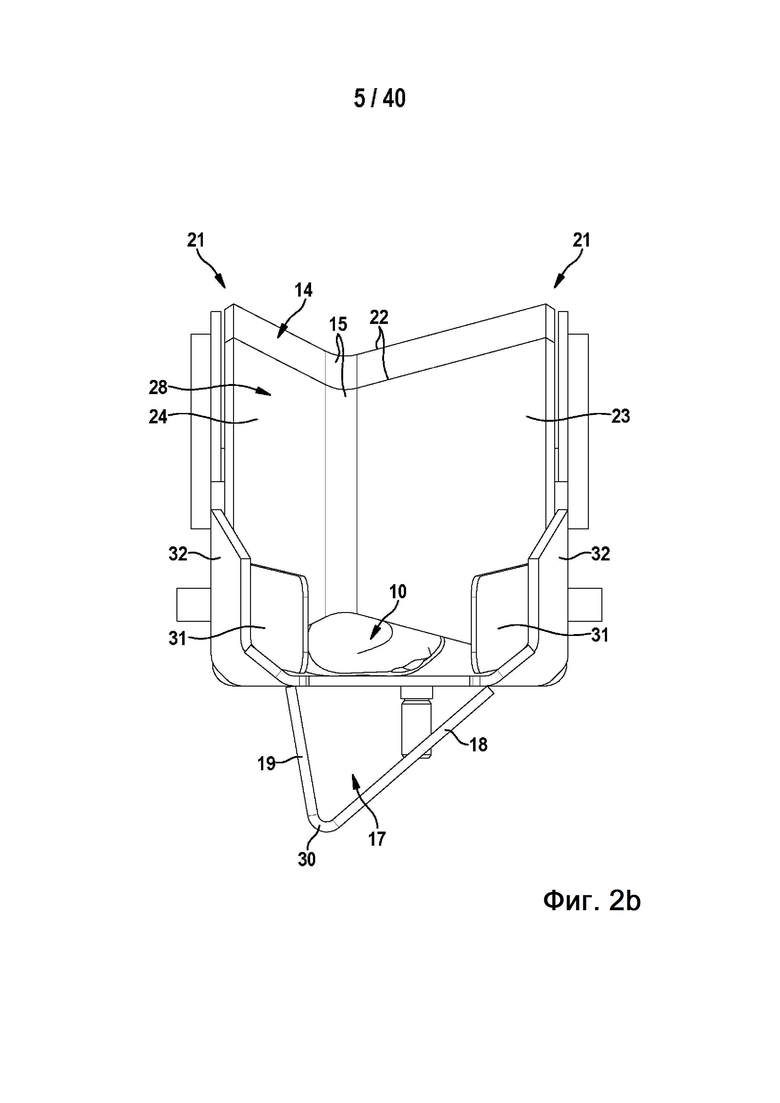
Как показано на Фиг. 1а, 1b и 1с, сначала рыба 10 входит во взаимодействие с направляющим роликом 14. Поперечное положение рыбы 10 обеспечивается благодаря вышеописанной геометрии направляющего ролика 14. Как можно видеть на Фиг. 2а, 2b и 2с, обеспечивается ориентирование рыбы 10 из ее положения 35 загрузки, см. Фиг. 1а, 1b и 1с, в поперечное положение, как показано на Фиг. 2а, 2b и 2с, поперечно направлению 11 транспортирования. Расположение рыбы 10 в поперечном направлении с помощью направляющего ролика 14 обеспечивается таким образом, что участок рыбы 10, имеющий наибольшую ширину, оказывается расположенным в области секции 15 направляющего ролика 14, имеющей поперечное сечение уменьшенного диаметра.
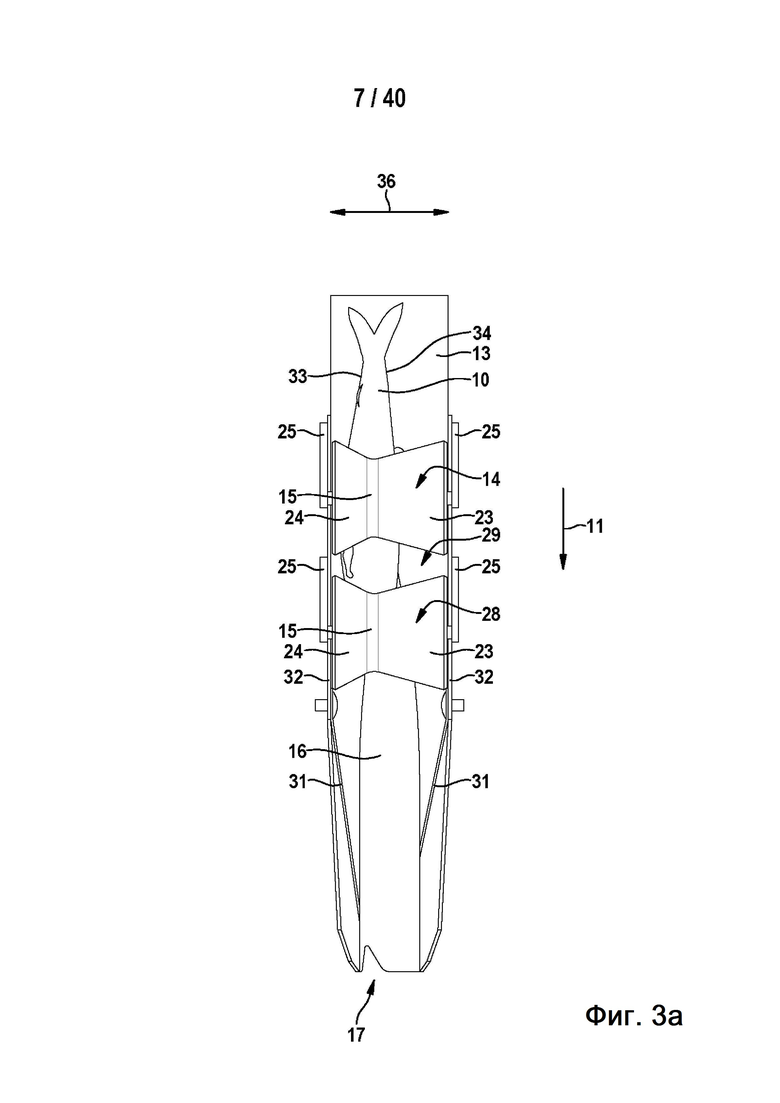
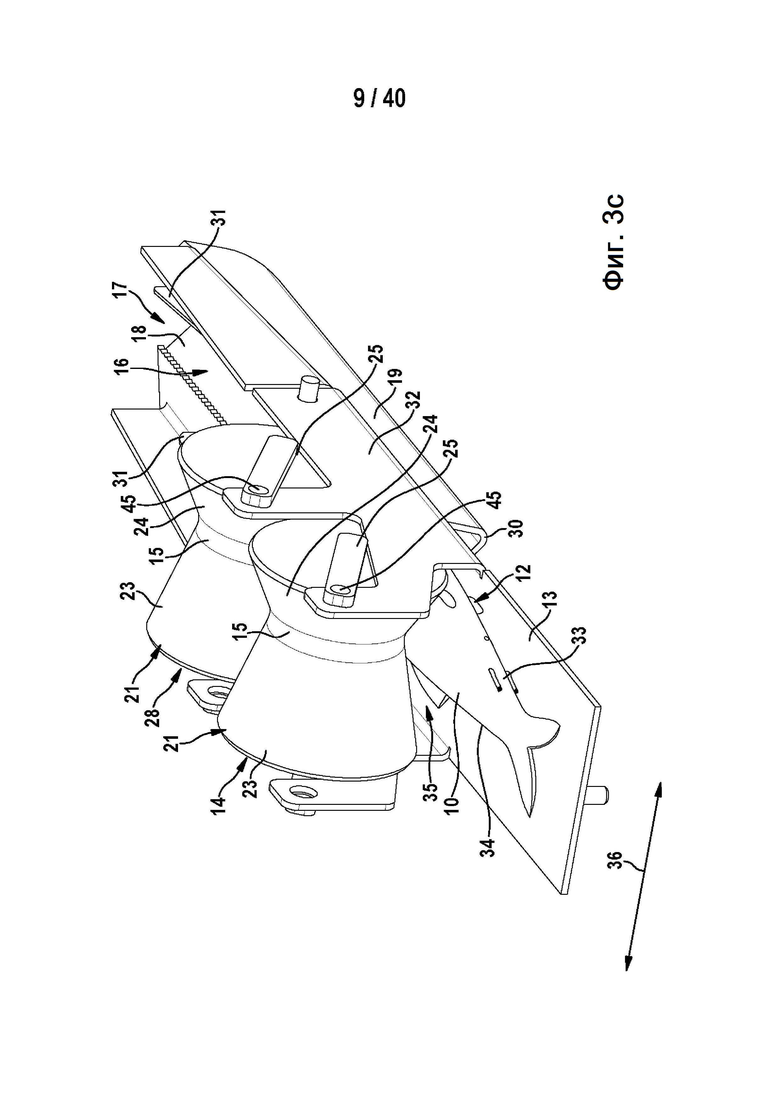
Как показано на Фиг. 3а, 3b и 3с, голова 37 рыбы 10 достигает передаточной выемки 16. С помощью дополнительного направляющего ролика 28 удерживание рыбы 10 в поперечном положении обеспечивается даже в области передаточной выемки 16.
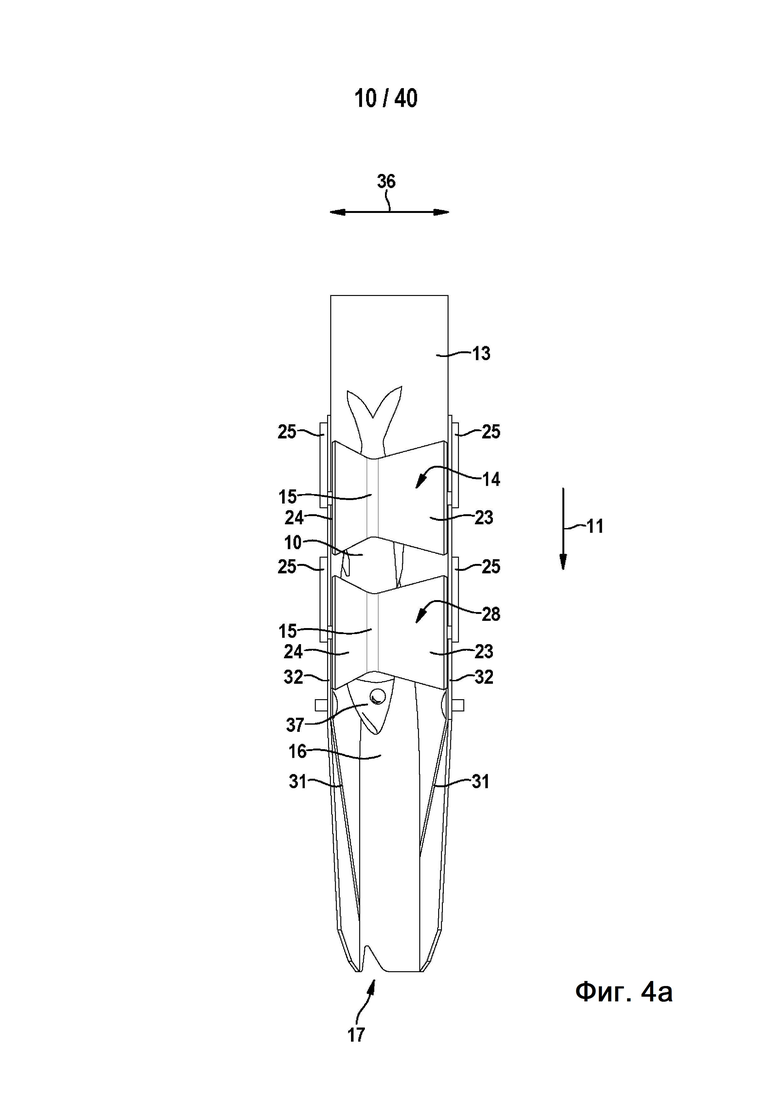
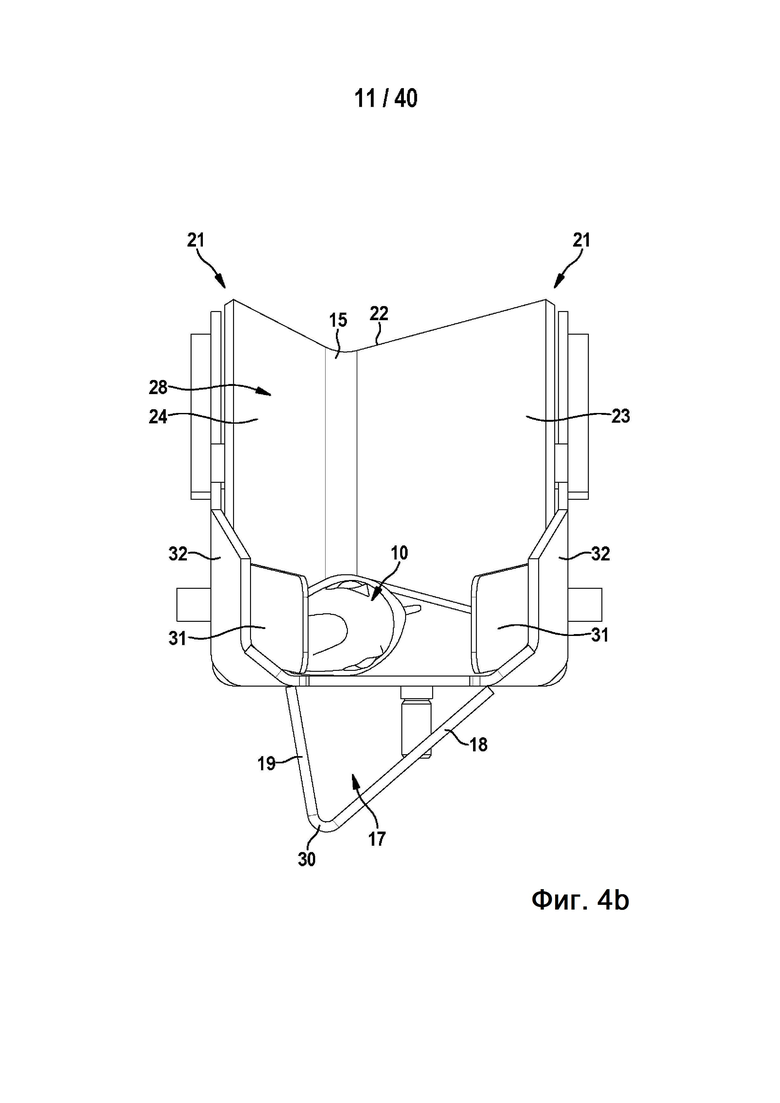
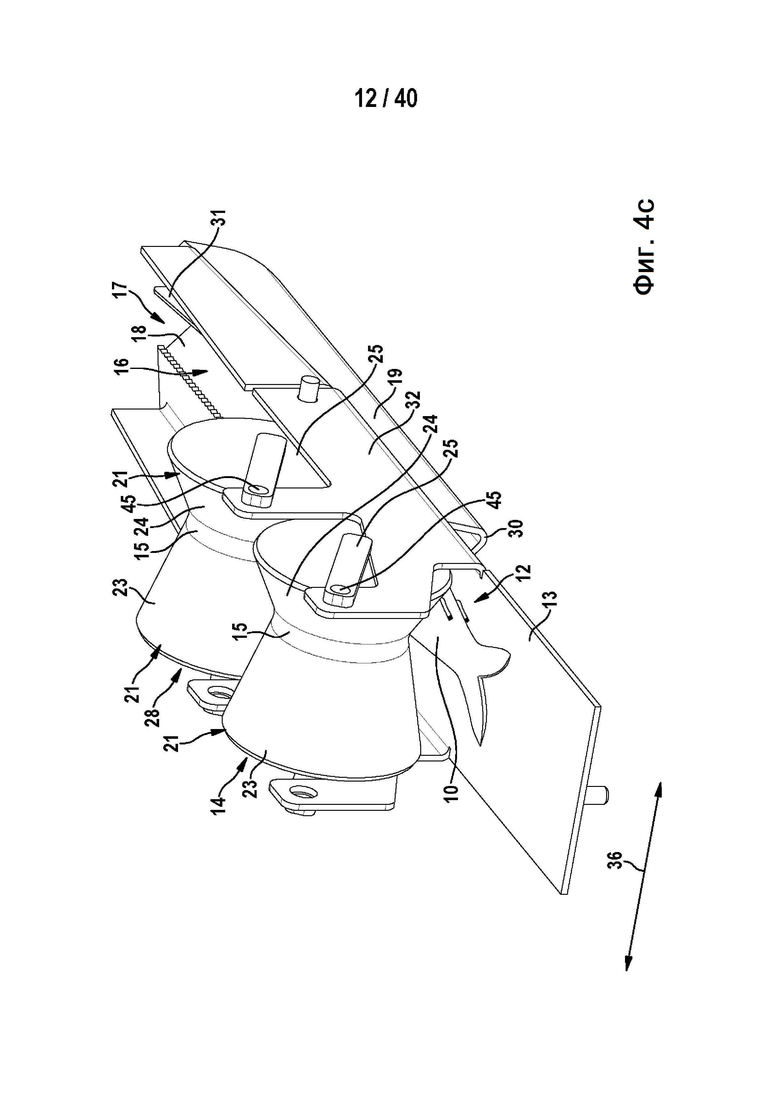
На Фиг. 4а, 4b и 4с ясно видно, что рыба по достижении поперечного положения 36 продолжает его удерживать даже, когда она уже расположена частично над передаточной выемкой 16 и не поддерживается площадкой 13.
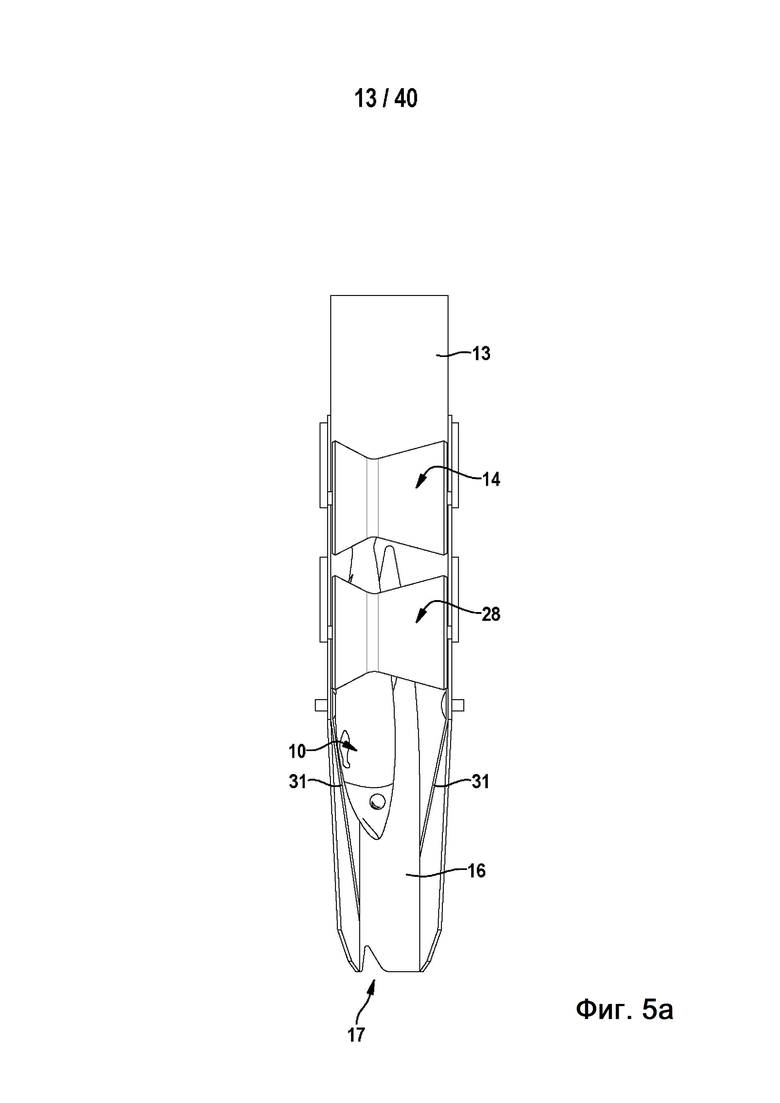
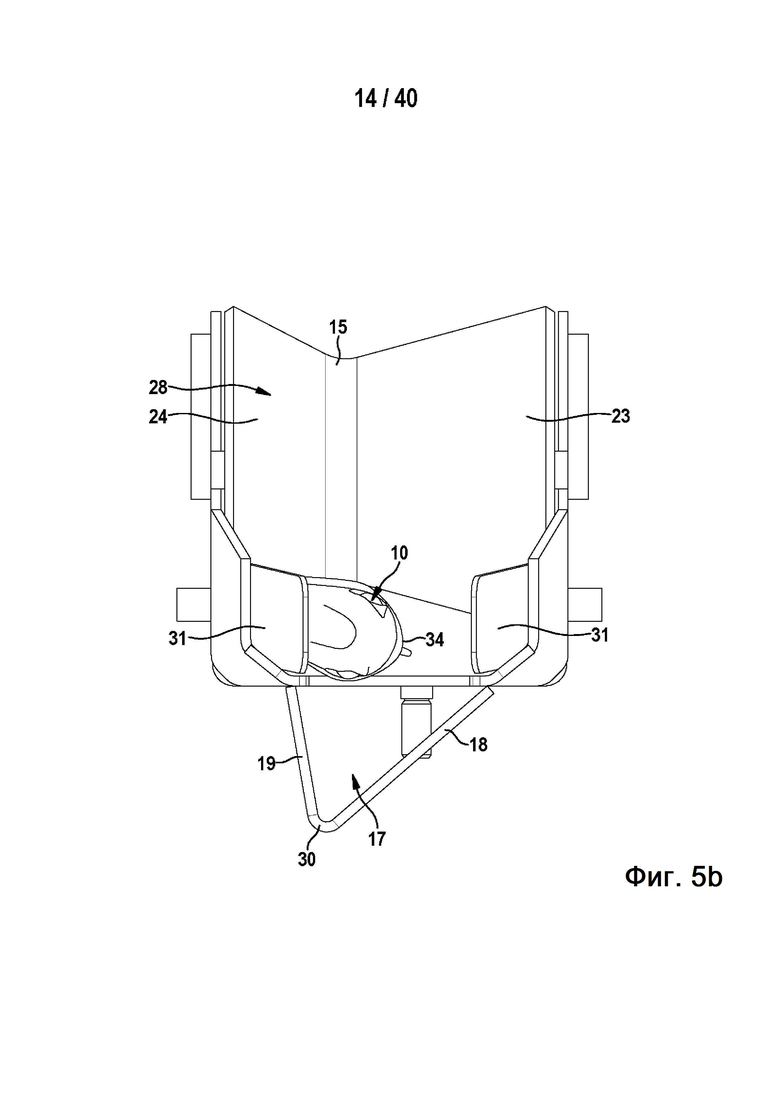
На Фиг. 5а и 5b показана первая иллюстрация, на которой рыба 10 уже переместилась в направлении 11 транспортирования в местоположение, в котором расширение передаточной выемки 16 достигло такой степени, при которой рыба 10 больше не может полностью поддерживаться площадкой 13. Сначала под действием силы тяжести в направлении площадки 30 направляющего канала наклоняется брюшная часть 34 рыбы 10. В результате вокруг продольной оси рыбы 10 возникает вращательный импульс.
Для большей ясности в группах Фиг. 6-14 чертежей не указаны все номера обозначения. На каждом из приведенных чертежей показаны разные этапы прохождения одной из рыбин 10 в направлении 11 транспортирования, поэтому чертежи в основном идентичны.
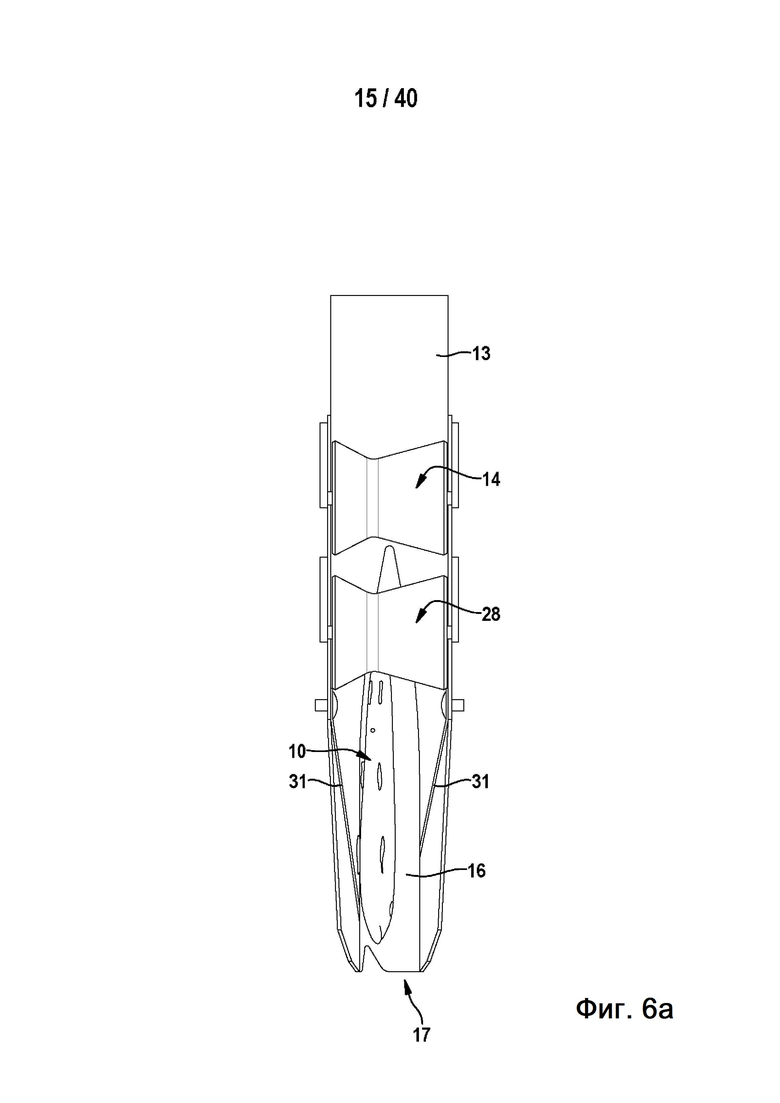
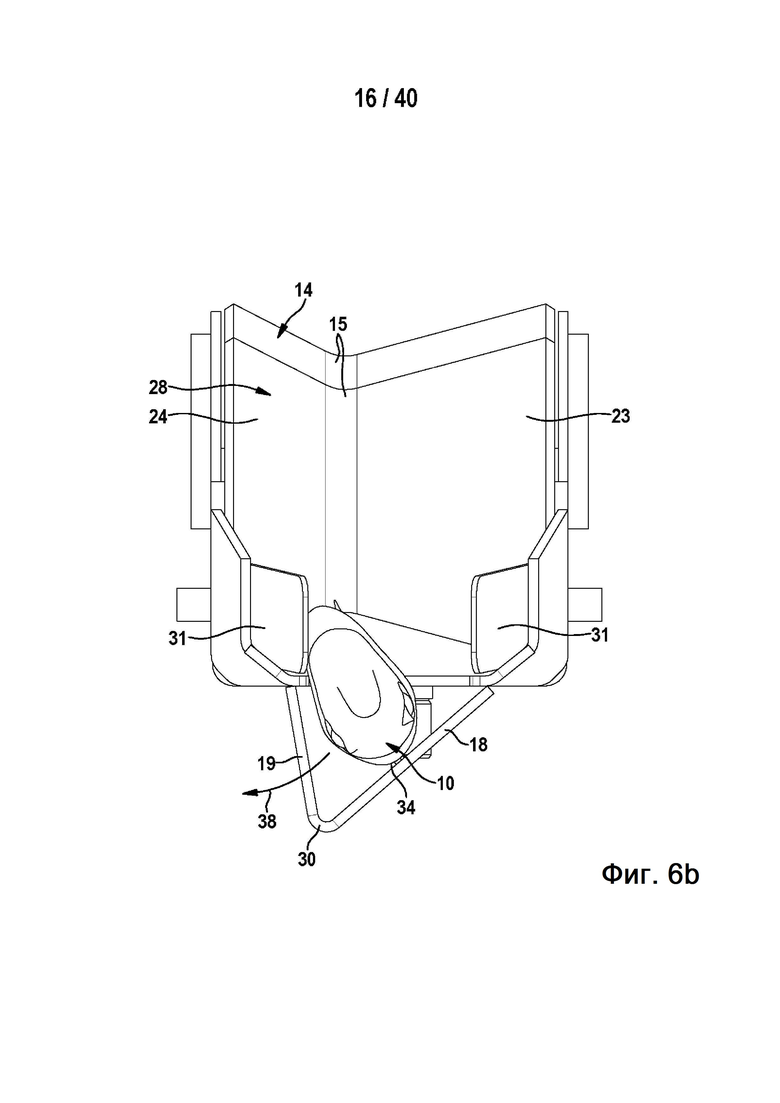
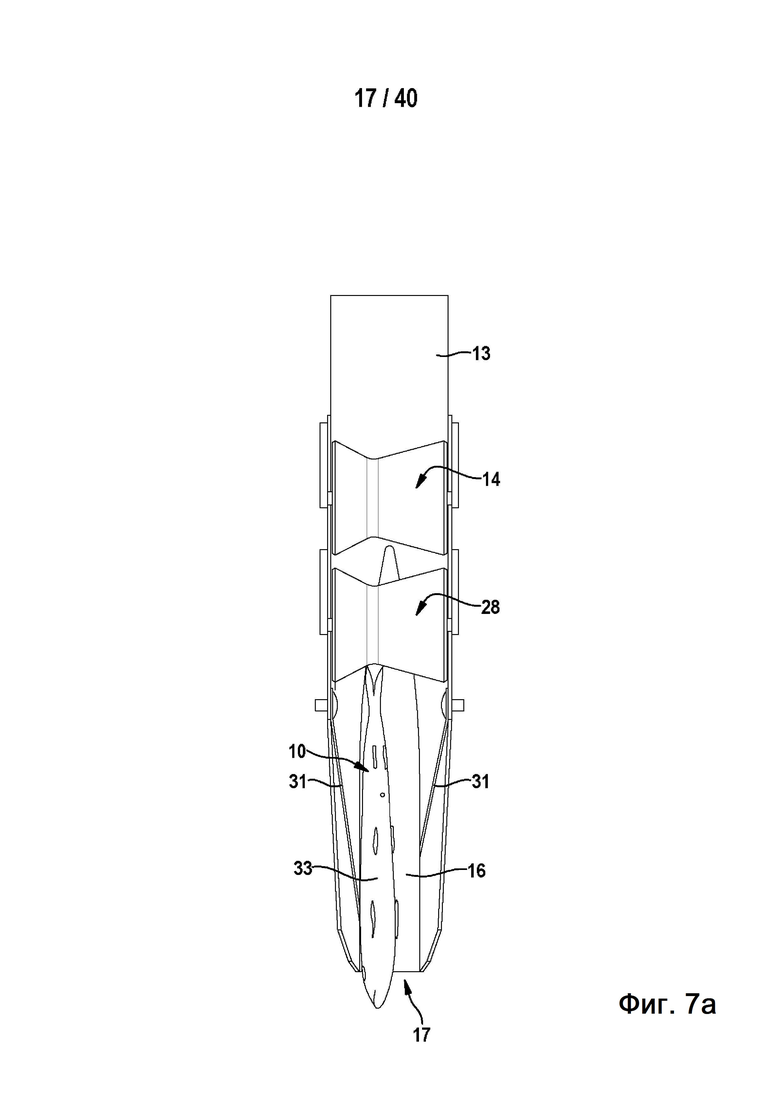
На Фиг. 6а и 6b показана иллюстрация, на которой рыба 10 опирается своей спинкой 34 на боковую направляющую поверхность 18 направляющего канала 17. Благодаря возникновению вращательного импульса и наклону боковой направляющей поверхности 18 рыба 10 путем скольжения перемещается в положение, показанное на Фиг. 7а и 7b, с последующим поворотом в направлении по стрелке 38.
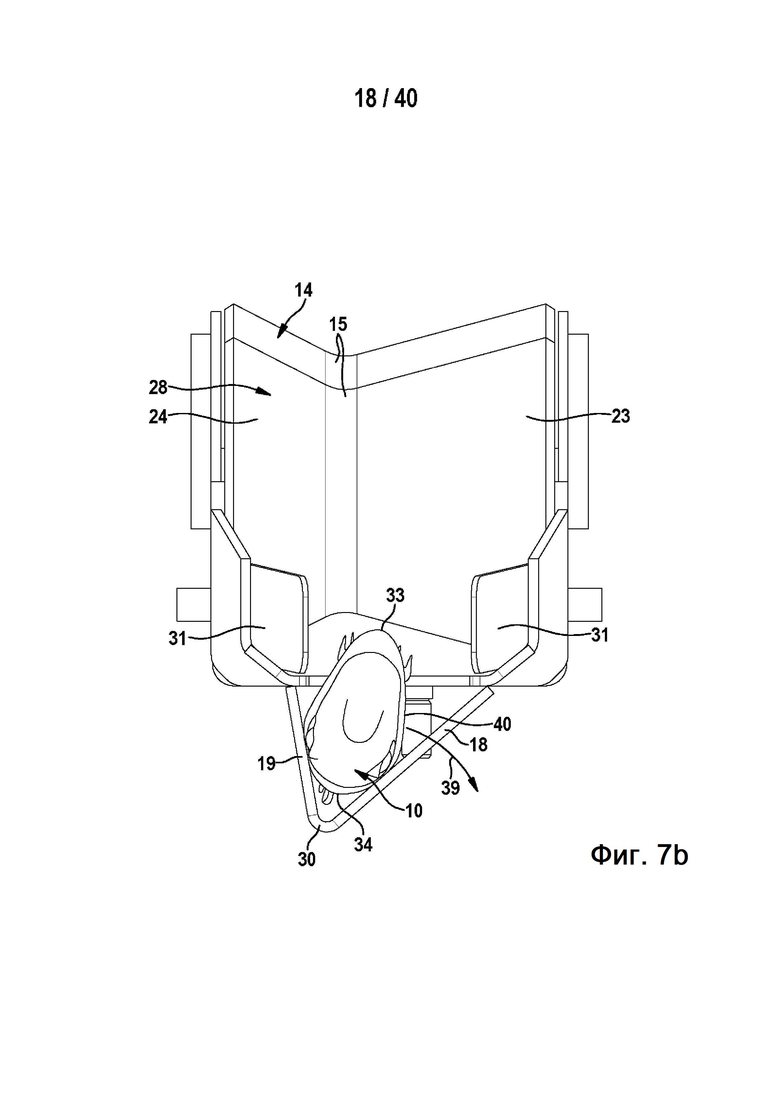
Иллюстрация на Фиг. 7а и 7b показывает рыбу 10 по достижении ею вышеописанного положения. В конечном счете, из этого положения рыба 10 наклоняется в направлении по стрелке 39 в направлении боковой направляющей поверхности 18 и остается на ней с поддерживанием ее боковой стороны 40 так, что брюшная часть 33 теперь ориентирована влево относительно направления 11 транспортирования, в результате чего обеспечивается ориентация, при которой брюшная часть или спинка находится в требуемом положении.
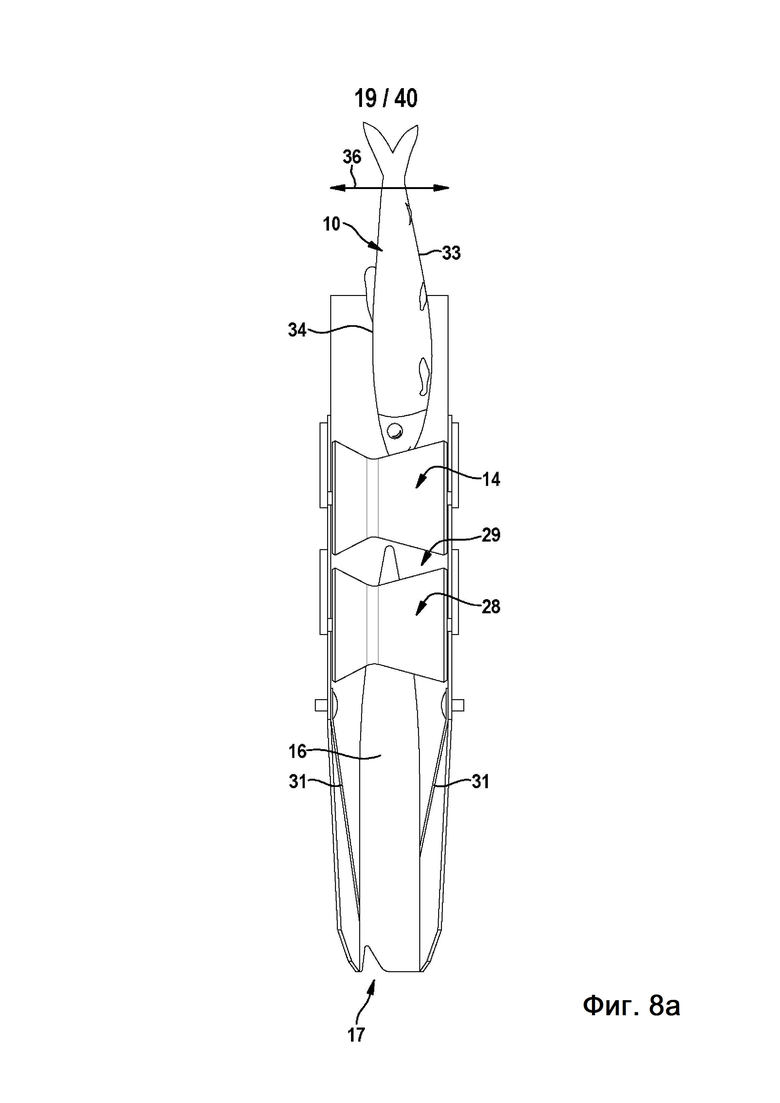
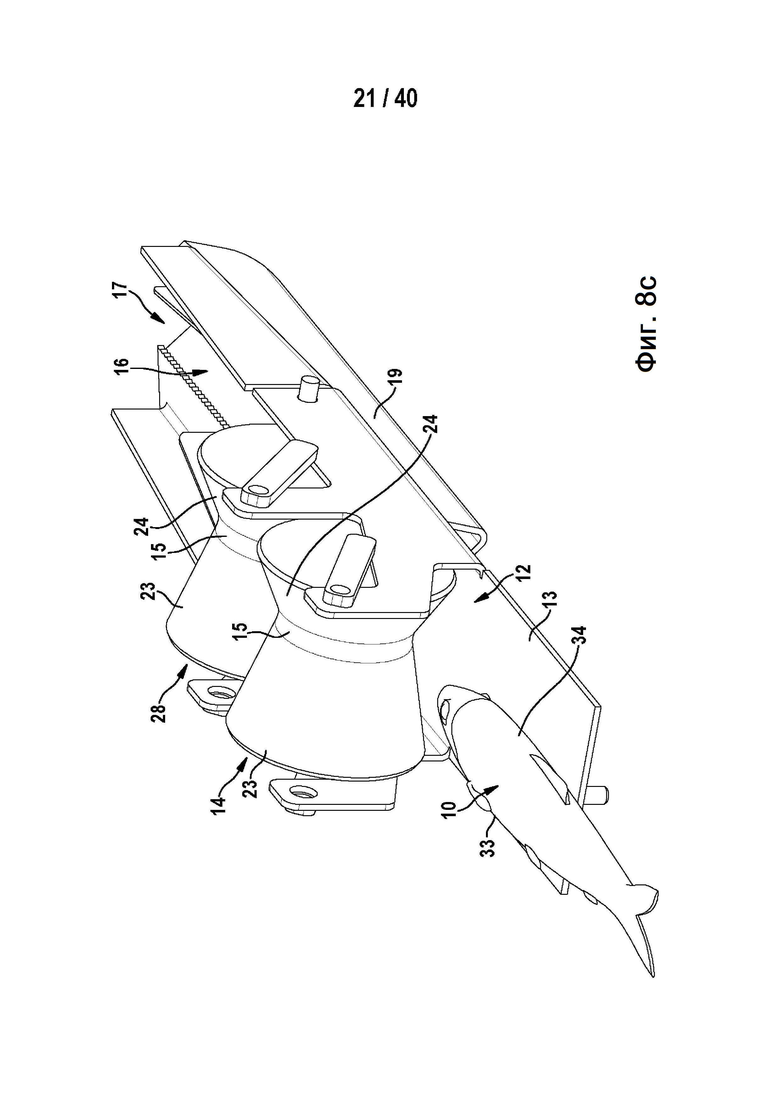
Группы Фиг. 8-14 чертежей иллюстрируют перемещение одной рыбы 10, у которой брюшная часть или спинка уже имеет требуемую ориентацию, при которой брюшная часть 33 направлена влево относительно направления 11 транспортирования.
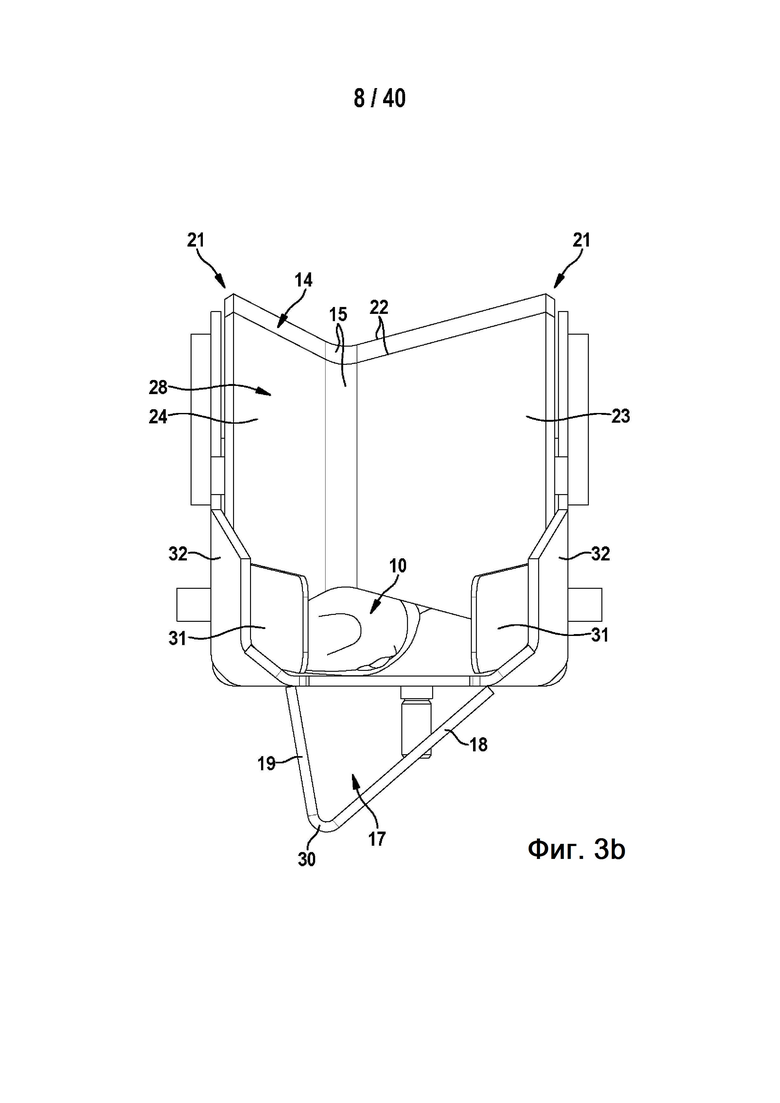
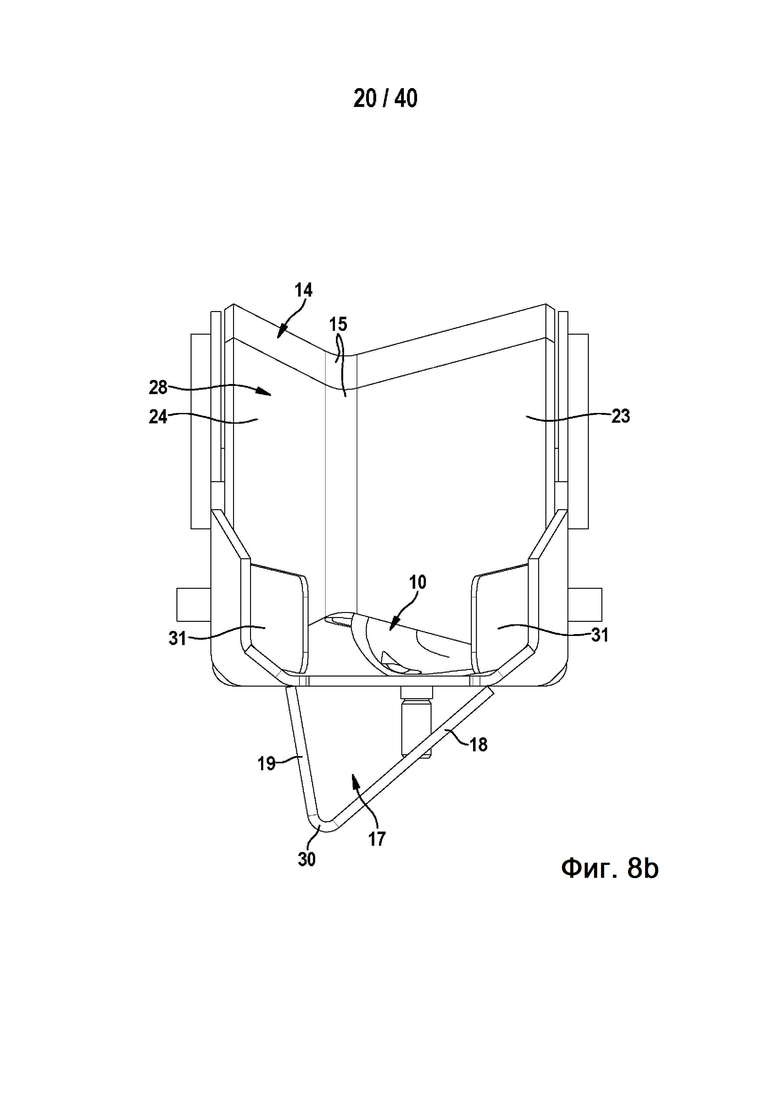
На Фиг. 8а, 8b и 8с показана рыба 10, которая имеет такую ориентацию в направлении 11 транспортирования, что ее брюшная часть 33 уже направлена влево, а спинка 34 рыбы 10 направлена вправо.
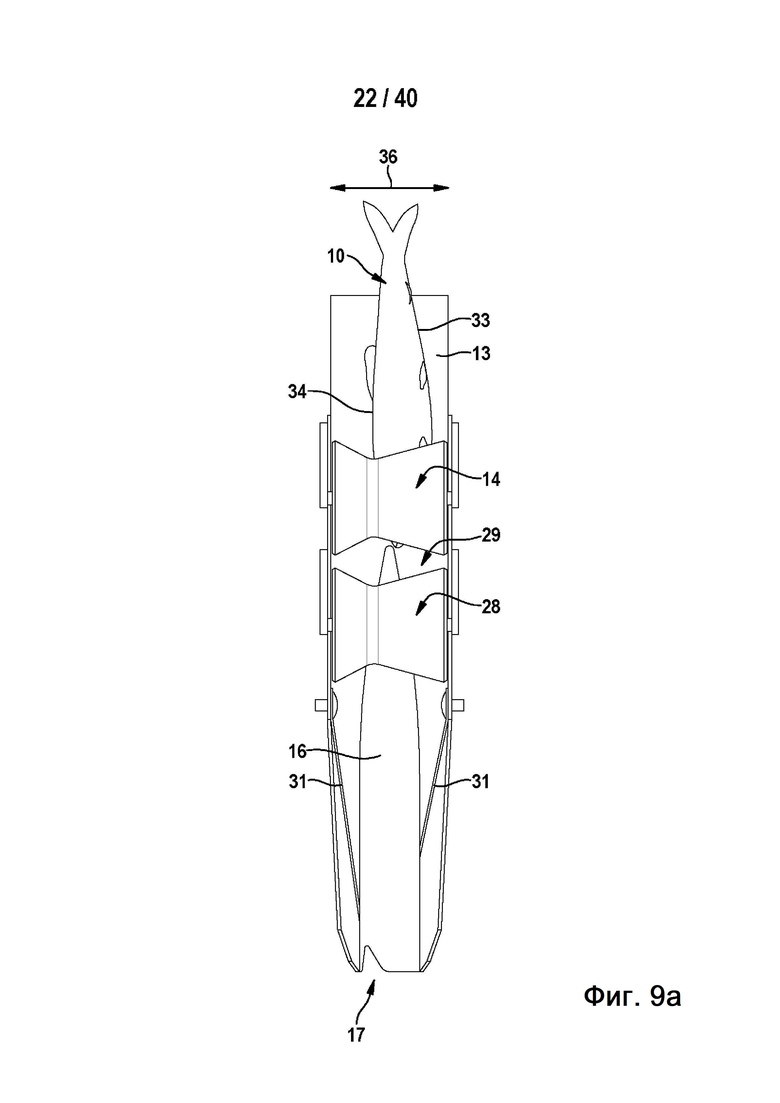
Сначала рыба 10 входит во взаимодействие с направляющим роликом 14. Поперечное расположение рыбы 10 обеспечивается благодаря описанной выше геометрии ролика 14. В этом случае рыба 10 постепенно перемещается вправо относительно направления 11 транспортирования, что ясно при сравнении групп фиг. 8 и 9 чертежей. В этом случае расположение рыбы 10 в поперечном направлении также обеспечивается посредством ролика 14 так, что участок рыбы 10 с наибольшей шириной оказывается расположенным в области секции 15 ролика 14, которая имеет поперечное сечение уменьшенного диаметра. В результате, благодаря геометрической форме рыбы и тому, что рыба 10 была загружена с правильной ориентацией брюшной части или спинки, рыба 10 транспортируется приблизительно по центру, вровень с передаточной выемкой 16.
При сравнении поперечного положения 36 рыбы 10, показанного на Фиг. 10b, с поперечным положением 36, показанным на Фиг. 4b, отчетливо видны различия.
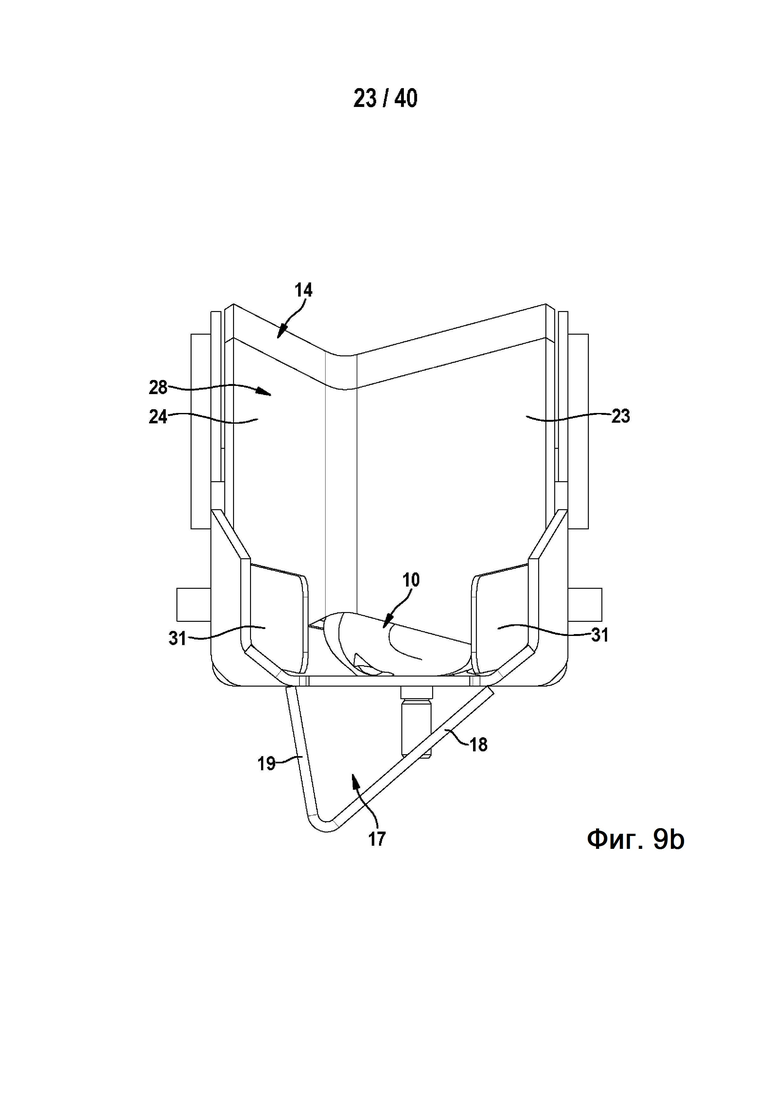
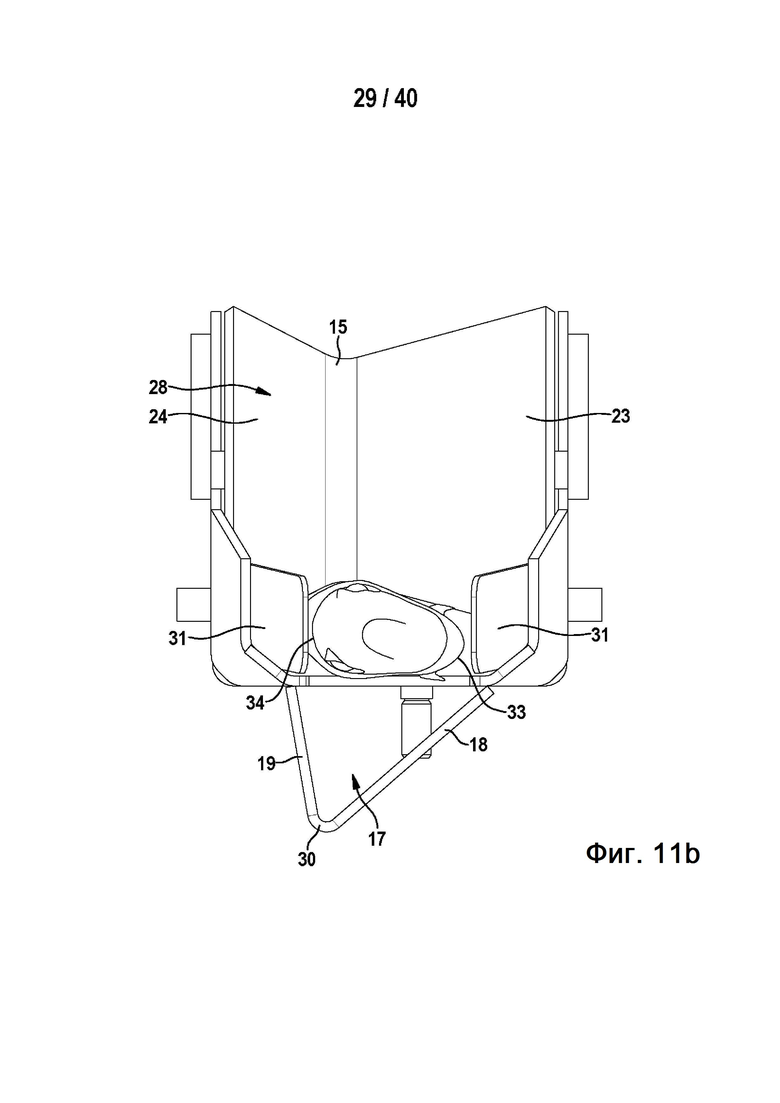
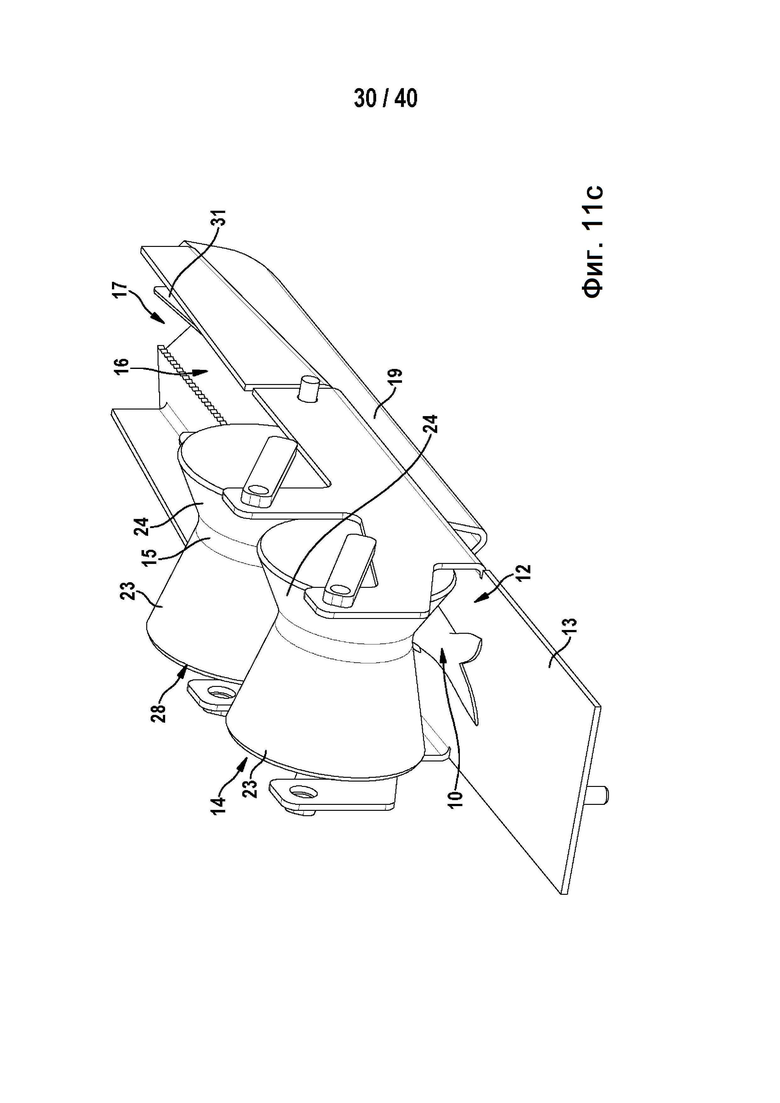
На Фиг. 11а, 11b и 11с показано, как рыба 10 поступает в передаточную выемку 16 с центрированием посередине или по существу с центрированием посередине. Постоянное нахождение в такой ориентации поддерживается с помощью дополнительного направляющего ролика 28.
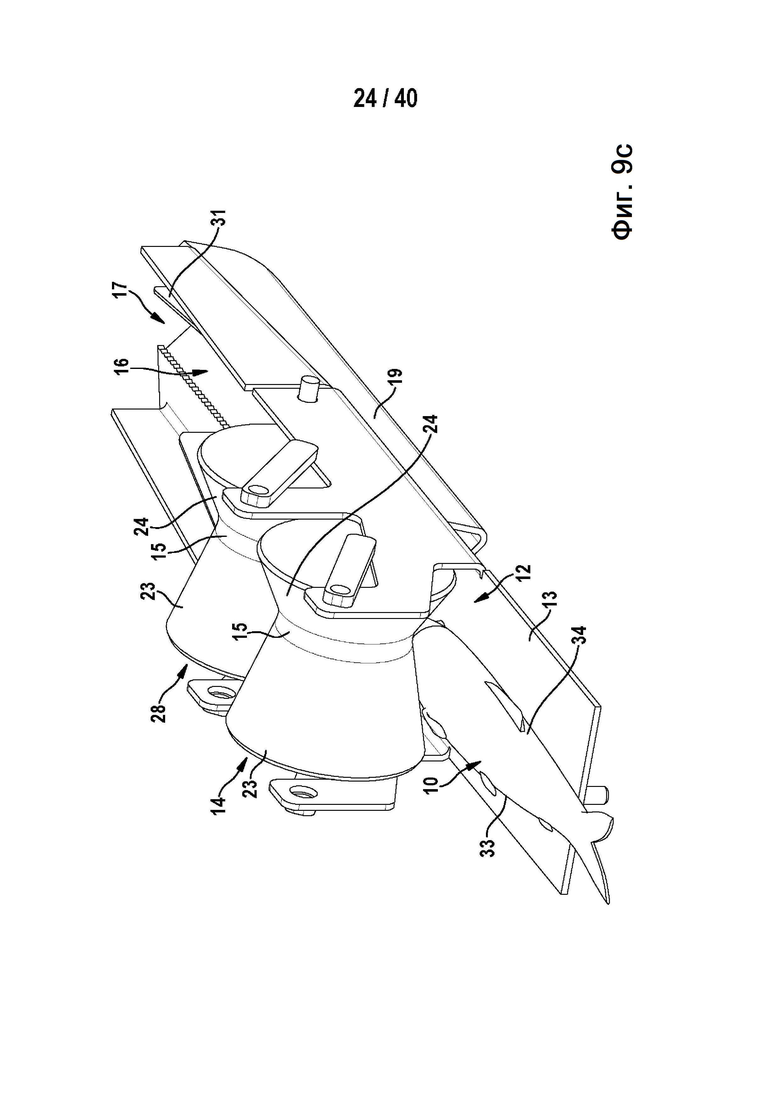
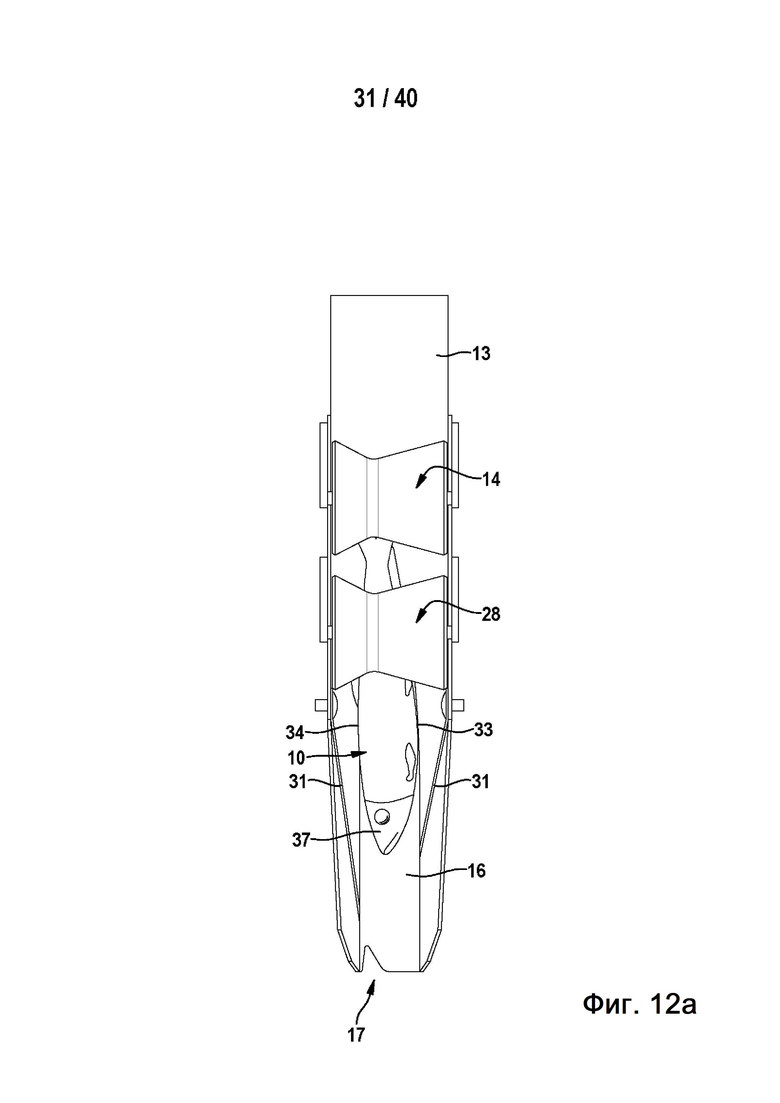
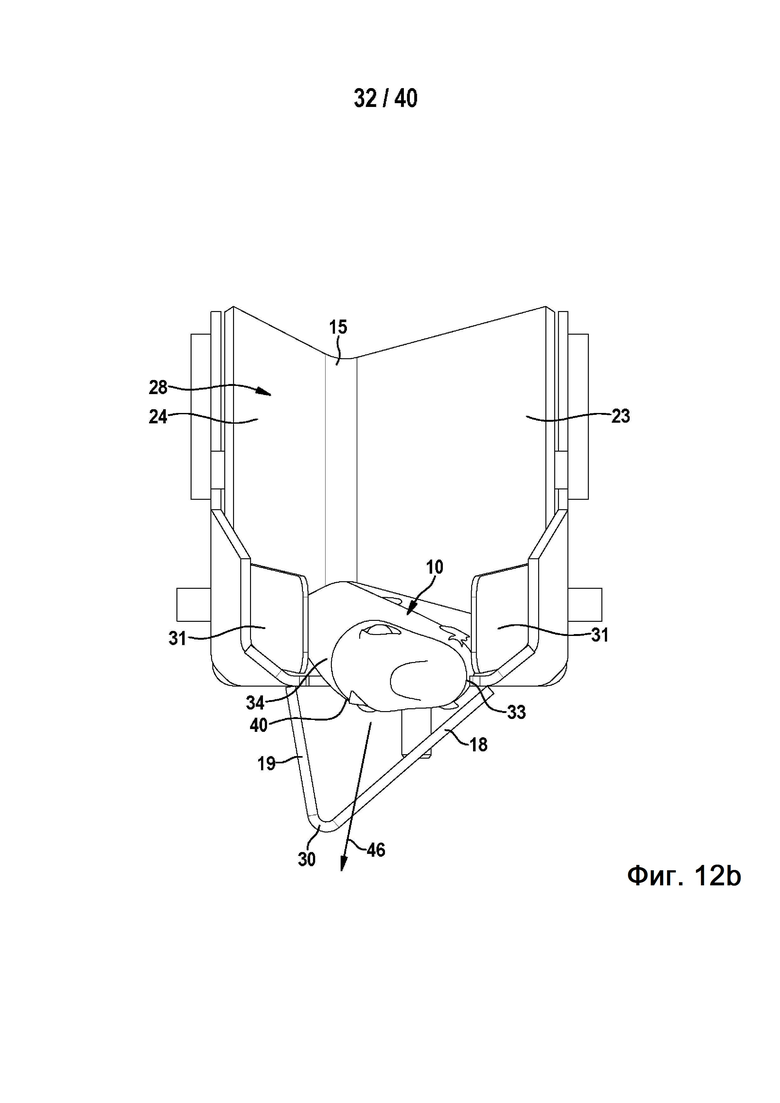
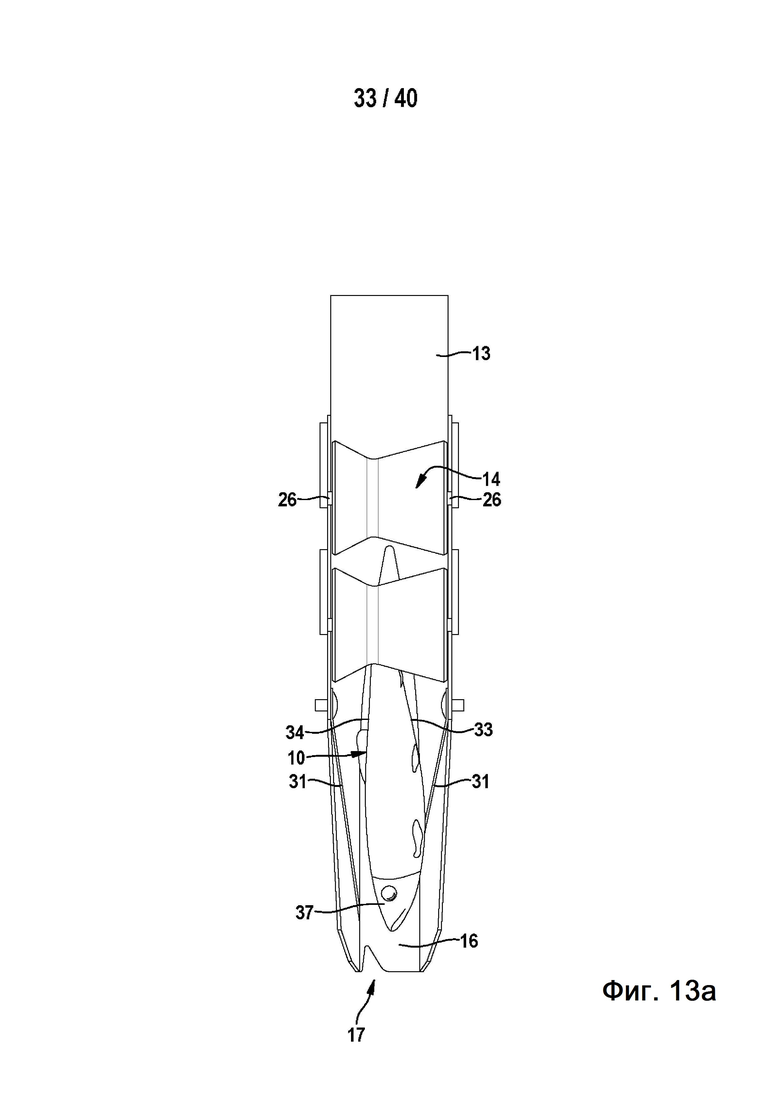
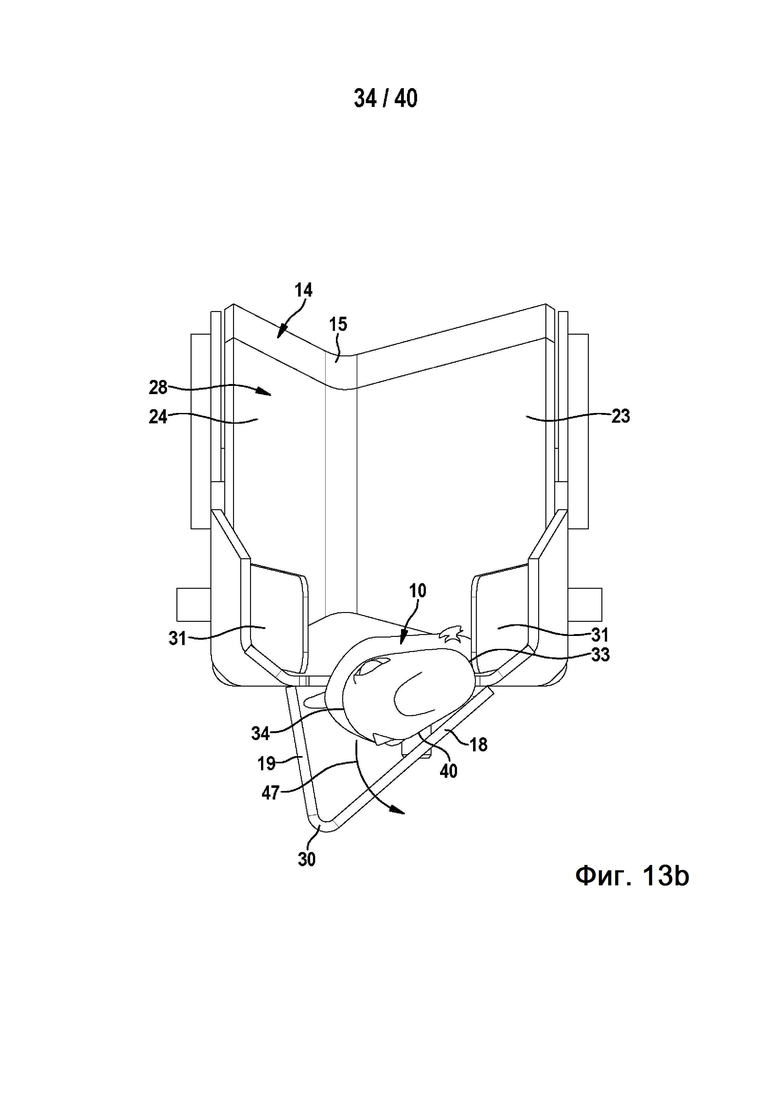
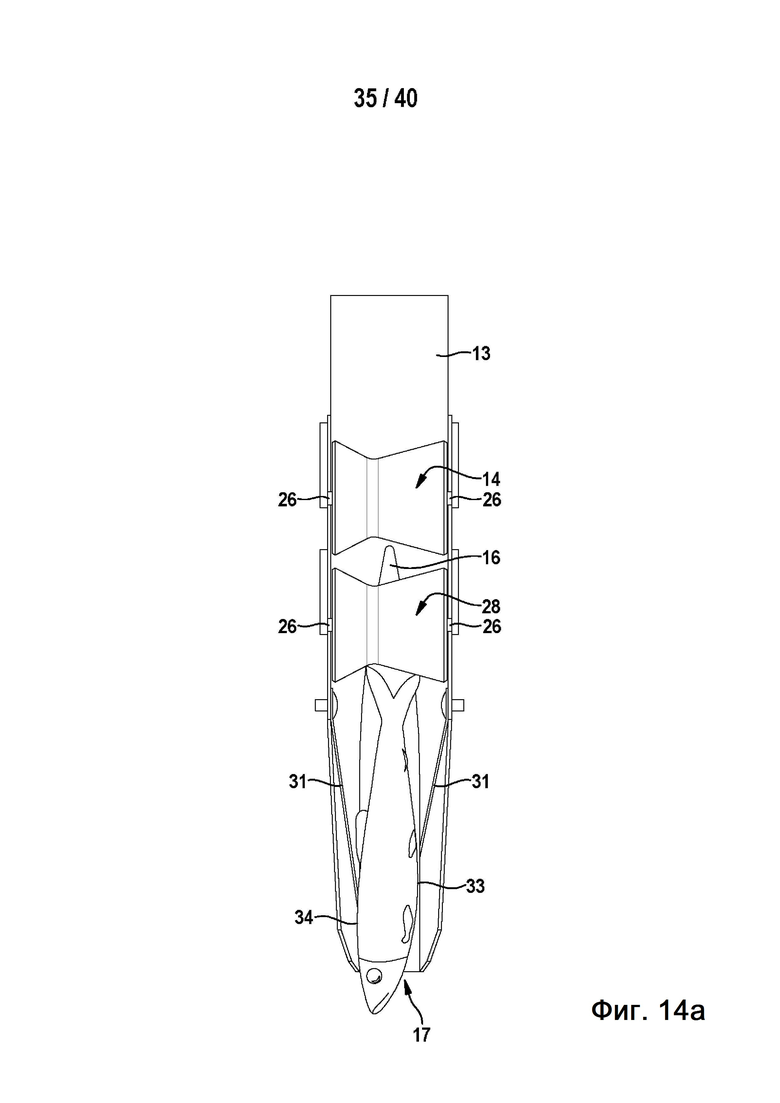
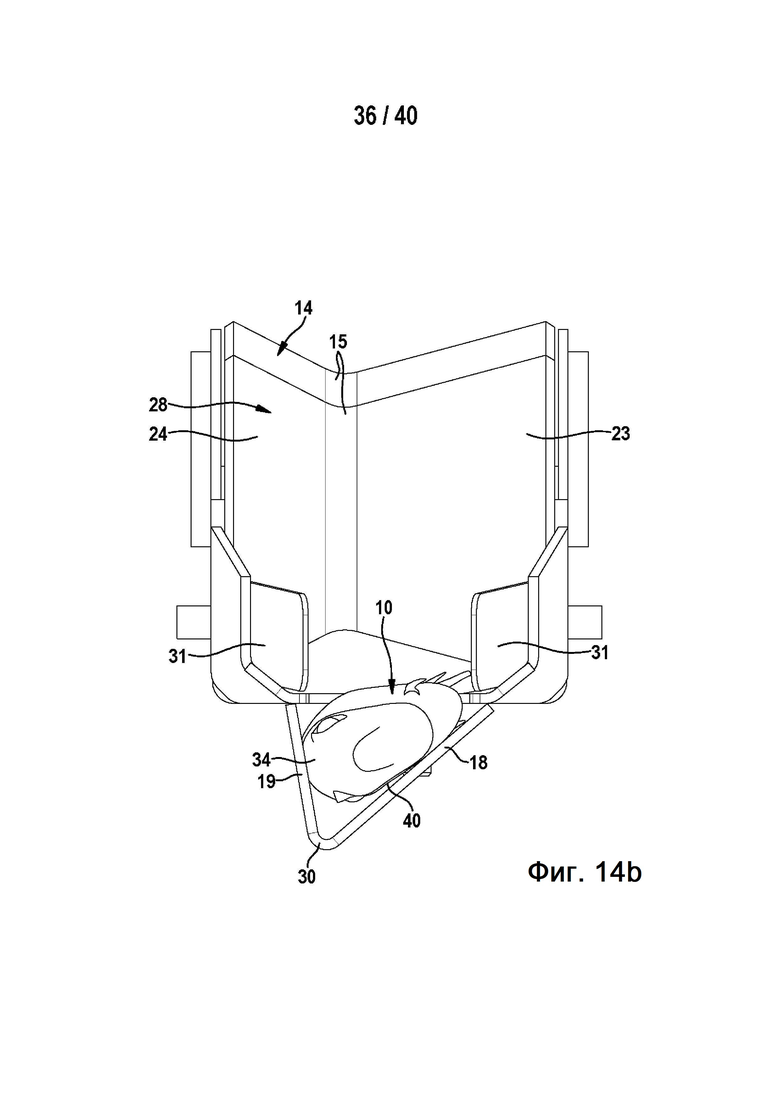
На Фиг. 12а, 12b и 13а, 13b показано, как рыба 10 при прохождении через передаточную выемку 16 падает под действием силы тяжести в направлении площадки 30 направляющего канала. Как видно на чертежах, направленная вниз боковая сторона 40 рыбы 10 перемещается к боковой направляющей поверхности 18 для того, чтобы, в конце концов, достигнуть требуемой ориентации брюшной части или спинки, как проиллюстрировано на Фиг. 14а и 14b.
В частности, иллюстрация на Фиг. 12b показывает, как сначала боковая сторона 40 рыба 10 перемещается в направлении по стрелке 46. Это перемещение изначально является по существу бесповоротным. Рыба 10 падает под действием силы тяжести в направлении по стрелке 46.
Благодаря разному наклону боковых направляющих поверхностей 18, 19 и соответствующему поддерживанию боковой стороны 40, которая не является сплошной поверхностью, рыба 10 дополнительно получает определенный вращательный импульс вокруг своей продольной оси, в результате чего рыба совершает поворот вокруг своей продольной оси в направлении стрелки 47, как показано на Фиг. 13b, чтобы, в конце концов, достигнуть требуемой ориентации брюшной части или спинки, как показано на Фиг. 14а и 14b.
Фиг. 15 изображает дополнительный вид в аксонометрии устройства согласно данному изобретению в направлении, противоположном направлению 11 транспортирования. Фиг. 16 изображает вариант выполнения, альтернативный показанному на Фиг. 15. Вместо использования рычагов 25 направляющие ролики 14, 28 установлены в удлиненных отверстиях 41. Как показано на чертеже, удлиненные отверстия 41 предпочтительно проходят под наклоном в направлении 11. В частности, в сочетании с указанным транспортированием за счет вибрации обеспечивается положительное влияние на производительность, поскольку устройство в целом настроено на обеспечение перемещения из стороны в сторону в направлении 11 при вибрационном транспортировании. В силу своей механической инерции направляющие ролики 14, 28 перемещаются вверх и вниз по осям, не показанным на чертежах, которые установлены в отверстиях 41, и придают рыбе 10 дополнительное ускорение при ее прохождении через передаточную выемку 16.
Кроме того, предпочтительно несколько предложенных устройств установлены параллельно. В качестве примера на Фиг. 17 изображен вид в аксонометрии четырех предложенных устройств, установленных параллельно, при этом загрузочный блок 42 установлен выше по потоку. Посредством загрузочного блока обеспечивается предварительная ориентация рыбы 10 и транспортирование рыбы головой 37 вперед в соответствующие загрузочные каналы 12.
Фиг. 18 изображает увеличенный подробный вид части секции, показанной на Фиг. 17. На Фиг. 18 дополнительно показаны синхронизирующие элементы 43, которые обеспечивают перемещение рыбы 10, выходящей из направляющего канала 17, к другим транспортерам 44 контролируемым образом в течение заданного периода времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТИРОВОЧНАЯ УСТАНОВКА, СПОСОБ ТРАНСПОРТИРОВКИ РЫБЫ ПОПЕРЕЧНО ЕЕ ПРОДОЛЬНОЙ ПРОТЯЖЕННОСТИ В НАПРАВЛЕНИИ ТРАНСПОРТИРОВАНИЯ И РЫБООБРАБАТЫВАЮЩАЯ МАШИНА, СОДЕРЖАЩАЯ ТАКУЮ ТРАНСПОРТИРОВОЧНУЮ УСТАНОВКУ | 2017 |
|
RU2717486C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ВЫЯВЛЕНИЯ ПОЛОЖЕНИЯ БРЮШКА/СПИНКИ РЫБЫ, ТРАНСПОРТИРУЕМОЙ С ПОМОЩЬЮ ТРАНСПОРТИРУЮЩЕГО ПРИСПОСОБЛЕНИЯ | 2017 |
|
RU2717020C1 |
| Устройство для филетирования рыбы | 1990 |
|
SU1832003A1 |
| УСТРОЙСТВО ПОЗИЦИОНИРОВАНИЯ РЫБЫ | 1996 |
|
RU2104647C1 |
| Машина для филетирования рыбы | 1981 |
|
SU993899A2 |
| Устройство для извлечения ястыков икры из тушки рыбы | 1988 |
|
SU1816196A3 |
| УСТРОЙСТВО ПОДАЧИ РЫБЫ И СПОСОБ ПОДАЧИ | 2016 |
|
RU2716206C1 |
| Устройство для филетирования рыбы | 1978 |
|
SU764634A1 |
| Машина для разделки рыбы | 1984 |
|
SU1210766A1 |
| Устройство для филетирования рыбы | 1990 |
|
SU1708237A1 |
Группа изобретений относится к рыбоперерабатывающей промышленности, а именно к способу и устройству для ориентации брюшных частей/спинок рыбы. Устройство содержит первое транспортирующее средство, выполненное с возможностью транспортирования рыбы (10) головой вперед на боковых сторонах рыбы, имеющее загрузочный канал (12), который выполнен с возможностью направления рыбы в направлении (11) транспортирования и имеет площадку (13), образующую первую плоскость транспортирования, по меньшей мере один направляющий ролик (14, 28), расположенный на расстоянии от площадки (13) и выполненный с возможностью позиционирования рыбы (10) в загрузочном канале (12) в поперечном направлении. Направляющий ролик (14, 28) проходит по ширине загрузочного канала (12) и имеет по меньшей мере одну секцию (15) с поперечным сечением уменьшенного диаметра, которая расположена эксцентрично относительно центра загрузочного канала (12), при этом диаметр поперечного сечения направляющего ролика (14, 28), начиная от секции (15), увеличивается в направлении обеих наружных секций (21) направляющего ролика (14, 28), так что секция (15) с поперечным сечением уменьшенного диаметра вместе с наружными секциями (21) образует вогнутый наружный контур (22) направляющего ролика (14, 28), образующий ответную часть для геометрии поперечного сечения рыбы (10). Площадка (13), расположенная в центре канала (12), имеет передаточную выемку (16), расширяющуюся в направлении (11) транспортирования и предназначенную для обеспечения перемещения рыбы (10) под действием силы тяжести в направляющий канал (17), расположенный ниже первой плоскости транспортирования, путем ориентации, при которой брюшные части/спинки расположены одинаково в поперечном направлении. Направляющий канал (17) имеет боковые направляющие поверхности (18, 19), каждая из которых расположена под наклоном относительно первой плоскости транспортирования, и второе транспортирующее средство (20), образующее вторую плоскость транспортирования и выполненное с возможностью транспортирования рыбы (10) на ее боковых сторонах, при этом указанное второе транспортирующее средство расположено ниже по потоку от направляющего канала (17) и предназначено для приема рыбы (10) на конце направляющего канала. 2 н. и 13 з.п. ф-лы, 18 ил.
1. Устройство для ориентации брюшных частей/спинок рыбы (10), содержащее
первое транспортирующее средство, выполненное с возможностью транспортирования рыбы (10) головой вперед на боковых сторонах рыбы, имеющее загрузочный канал (12), который выполнен с возможностью направления рыбы в направлении (11) транспортирования и имеет площадку (13), образующую первую плоскость транспортирования,
по меньшей мере один направляющий ролик (14, 28), расположенный на расстоянии от указанной площадки (13) и выполненный с возможностью позиционирования рыбы (10) в загрузочном канале (12) в поперечном направлении, причем указанный направляющий ролик проходит по ширине загрузочного канала (12) и имеет по меньшей мере одну секцию (15) с поперечным сечением уменьшенного диаметра, которая расположена эксцентрично относительно центра загрузочного канала (12), при этом диаметр поперечного сечения указанного направляющего ролика (14, 28), начиная от указанной секции (15), увеличивается в направлении обеих наружных секций (21) направляющего ролика (14, 28), так что указанная секция (15) с поперечным сечением уменьшенного диаметра вместе с наружными секциями (21) образует вогнутый наружный контур (22) указанного направляющего ролика (14, 28), образующий ответную часть для геометрии поперечного сечения рыбы (10),
причем указанная площадка (13) в центре указанного канала имеет передаточную выемку (16), расширяющуюся в указанном направлении (11) транспортирования и предназначенную для обеспечения перемещения рыбы (10) под действием силы тяжести в направляющий канал (17), расположенный ниже указанной первой плоскости транспортирования, путем ориентации, при которой брюшные части/спинки расположены одинаково в поперечном направлении,
при этом указанный направляющий канал (17) имеет боковые направляющие поверхности (18, 19), каждая из которых расположена под наклоном относительно указанной первой плоскости транспортирования, и
второе транспортирующее средство (20), образующее вторую плоскость транспортирования и выполненное с возможностью транспортирования рыбы (10) на ее боковых сторонах, при этом указанное второе транспортирующее средство расположено ниже по потоку от указанного направляющего канала (17) и предназначено для приема рыбы (10) на конце указанного направляющего канала.
2. Устройство по п. 1, отличающееся тем, что в области каждой наружной секции (21) указанный направляющий ролик (14, 28) имеет форму по меньшей мере по существу усеченного конуса.
3. Устройство по п. 1 или 2, отличающееся тем, что указанный наружный контур (22) выполнен без уступов.
4. Устройство по любому из пп. 1–3, отличающееся тем, что указанный направляющий ролик (14, 28) расположен с возможностью упругой установки.
5. Устройство по любому из пп. 1–4, отличающееся тем, что по меньшей мере один из указанных направляющих роликов (14, 28) расположен выше по потоку от указанной передаточной выемки (16) в направлении (11) транспортирования.
6. Устройство по любому из пп. 1–5, отличающееся тем, что по меньшей мере один из указанных направляющих роликов (14, 28) расположен на входном участке (29) указанной передаточной выемки (16), в пределах которого ширина указанной выемки (16) меньше ширины ее концевой части.
7. Устройство по любому из пп. 1–6, отличающееся тем, что наклоны указанных боковых направляющих поверхностей (18, 19) направляющего канала (17) отличаются друг от друга.
8. Устройство по любому из пп. 1–7, отличающееся тем, что указанный направляющий канал (17) имеет поперечное сечение по меньшей мере по существу треугольной формы.
9. Устройство по любому из пп. 1–8, отличающееся тем, что боковые направляющие поверхности (18, 19) указанного направляющего канала расположены под наклоном так, что они образуют площадку (30) направляющего канала, которая по меньшей мере по существу выровнена с указанной секцией (15) направляющего ролика (14, 28), имеющей поперечное сечение уменьшенного диаметра.
10. Устройство по любому из пп. 1–9, отличающееся тем, что по бокам с обеих сторон в загрузочном канале (12) расположены отклоняющие элементы (31), каждый из которых проходит, начиная от боковых стенок (32) указанного загрузочного канала, в направлении указанной передаточной выемки (16).
11. Устройство по любому из пп. 1–10, отличающееся тем, что указанная площадка (13) загрузочного канала (12) выполнена неровной, а указанное первое транспортирующее средство выполнено в виде вибрационного транспортера.
12. Способ ориентации брюшных частей/спинок рыбы (10), осуществляемый с помощью устройства по п. 1 и включающий следующие этапы:
транспортирование рыбы (10) головой вперед на ее боковых сторонах посредством указанного первого транспортирующего средства и направление рыбы (10) в направлении (11) транспортирования с помощью указанного загрузочного канала (12),
позиционирование рыбы (10) в указанном загрузочном канале (12) в поперечном направлении посредством указанного по меньшей мере одного направляющего ролика (14, 28), перемещение рыбы (10) под действием силы тяжести к указанному направляющему каналу (17) путем ориентации рыбы, при которой ее брюшные части/спинки расположены одинаково в поперечном направлении; и
прием рыбы (10) на конце указанного направляющего канала (17) посредством указанного второго транспортирующего средства (20) и транспортирование рыбы (10) на ее боковых сторонах посредством указанного второго транспортирующего средства (20).
13. Способ по п. 12, отличающийся тем, что при позиционировании рыбы (10) в поперечном направлении указанный направляющий ролик (14, 28) упруго отклоняется, противодействуя восстанавливающей силе.
14. Способ по п. 12 или 13, отличающийся тем, что сначала посредством указанного направляющего ролика (14, 28) ориентируют рыбу (10) в указанном загрузочном канале (12) в направлении, поперечном указанному направлению (11) транспортирования, а затем перемещают ее через указанную передаточную выемку (16).
15. Способ по любому из пп. 12–14, отличающийся тем, что рыбу (10) транспортируют посредством указанного транспортирующего средства с помощью вибрации.
| СПОСОБ КИСЛОТНОЙ ОБРАБОТКИ ПРИЗАБОЙНОЙ ЗОНЫ | 1996 |
|
RU2102590C1 |
| US 2018160692 A1, 14.06.2018 | |||
| Устройство для ориентирования рыбы | 1982 |
|
SU1124909A1 |
| US 457070784 A, 18.02.1986 | |||
| EP 2982448 A1, 10.02.2016. | |||

