Изобретение относится к области обнаружения объектов в воздушном пространстве, а более конкретно, к способам обнаружения малых беспилотных летательных аппаратов (БЛА) посредством измерения акустической скорости частиц совместно с радиолокационными измерениями.
Множество разнообразных способов обнаружения БЛА, описанных в литературе, или представленных в реализованных продуктах на современном рынке, можно классифицировать по характерным физическим признакам (сигнатурам) БЛА, используемых для их обнаружения:
- электрооптические способы на основе оптических сигнатур видимого спектра;
- инфракрасные способы на основе тепловых сигнатур;
- способы радиомониторинга на основе сканирования собственного радиочастотного излучения БЛА в различных диапазонах - радиочастотных сигнатур;
- радиолокационные активные способы на основе радиолокационных сигнатур, получаемых с помощью зондирующих электромагнитных волн;
- акустические способы на основе акустических сигнатур;
- совместные способы на основе комбинаций способов с различными физическими видами сигнатур.
Применение электрооптических способов ограничено необходимостью достаточной освещенности БЛА, обычно имеющейся лишь в дневное время суток, и требованием достаточной прозрачности атмосферы, зависящей от атмосферных осадков, туманов, пылевых и дымовых помех.
Применение инфракрасных способов ограничено тем, что современные малые БЛА оснащаются эффективными двигателями и полезной нагрузкой с низким тепловыделением.
Применение способов радиомониторинга ограничено тем, что значительное количество БЛА, особенно военного ударного назначения, способно осуществлять полет в условиях отсутствия собственных радиоизлучений с использованием инерциальных и иных автономных навигационных систем.
Применение радиолокационных активных способов ограничено тем, что современные мини- и микро-БЛА изготавливаются, преимущественно, из диэлектрических материалов, способны к полетам на низких скоростях и высотах, и имеют малую радиолокационную заметность, обладая эффективной площадью рассеяния от 0,01 до 0,1 м2.
Применение акустических способов ограничено чувствительностью и динамическим диапазоном существующих акустических приемников, что затрудняет обнаружение тихо звучащих БЛА в условиях акустических шумовых помех, например, типа стадион, рок-концерт, взлетно-посадочная полоса, поле боя.
Каждый из способов имеет свои недостатки. Поэтому панацеи для обнаружения малых БЛА не существует. Наиболее перспективными представляются совместные способы. При этом должна быть обеспечена как низкая вероятность пропуска целей, так и низкая вероятность ложных срабатываний.
Известен способ обнаружения БЛА комплекса борьбы с беспилотными летательными аппаратами [1 - патент RU 2700107 C1. Комплекс борьбы с беспилотными летательными аппаратами / Шишков С.В., Устинов Е.М., Барсуков В.А., и др. - Опубл. в Бюл. №26, 2019], характеризующийся тем, что система кругового обзора и прицеливания совместно с работой оптических, радиолокационных и акустических датчиков БЛА - самолетного типа, БЛА - мультикоптерного типа и роботизированными многофункциональными наземными платформами, после развертывания приводятся в движение и создают информационное поле для обнаружения БЛА противника в заданном районе для последующей борьбы с ними средствами поражения.
Первым недостатком способа обнаружения БЛА приведенного комплекса [1] является высокая вероятность ложных срабатываний при пролете стай птиц или отдельных птиц в заданном районе обнаружения.
Вторым недостатком способа [1] является то, что использование оптических датчиков затруднено или полностью невозможно в темное время суток и при наличии атмосферных осадков, туманов, пылевых и дымовых помех.
Известен радиолокационный способ обнаружения и классификации БЛА с использованием непрерывного частотно-модулированного зондирующего сигнала для измерений эффекта Доплера и микро-Доплера [2 - патент WO 2019/091867 A1. Radar based system and method for detection of an object and generation of plots holding radial velocity data, and system for detection and classification of unmanned aerial vehicles, UAVs / Wouter Keijer, Gerben Pakkert. - May 16, 2019]. Приведенный способ позволяет отличать полет мини- и микро-БЛА от полета стай птиц или отдельных птиц в любое время суток, а также при наличии атмосферных осадков, туманов, пылевых и дымовых помех.
Недостатком приведенного способа [2] является недостаточно низкая вероятность пропуска целей с малой радиолокационной заметностью. Вероятность пропуска цели возрастает в городских условиях, когда БЛА пролетает на малой высоте с низкой скоростью вблизи зданий.
Наиболее близким аналогом (прототипом) предложенного изобретения является способ обнаружения малозаметных БЛА с использованием средств радиолокации, пассивных акустических приемников и оптического прибора [3 - патент RU 2695015 C1. Способ обнаружения и поражения малозаметных боевых мини- и микро беспилотных летательных аппаратов / Кузнецов Н.С. - Опубл. в Бюл. №20, 2019]. Согласно способу-прототипу, вначале, с помощью пассивных акустических приемников, работающих в диапазоне частот 200-2000 Гц, по акустическому шуму от пропеллера определяют зону нахождения БЛА, а затем наводят средство радиолокации или оптический прибор с дальномером на эту зону, фиксируют БЛА, определяют расстояние от него до артиллерийского орудия и из этого орудия производят в эту зону выстрел снарядом с дистанционным взрывателем. При подрыве снаряда взрывная волна и осколки способны поразить малоразмерные БЛА на расстоянии более 50 м от точки подрыва. Многоканальная акустическая аппаратура для обнаружения акустического излучения от пропеллеров БЛА действует на основе оценки затухания сигналов, принятых на разнесенные по расстоянию акустические приемники.
Первым недостатком способа-прототипа является то, что использование оптического прибора затруднено или полностью невозможно в темное время суток и при наличии атмосферных осадков, туманов, пылевых и дымовых помех.
Вторым недостатком способа-прототипа является высокая вероятность пропуска целей при пролете стай птиц или отдельных птиц в зоне обнаружения. Причина таких пропусков целей заключается в том, что средства радиолокации, включаемые после срабатывания акустических приемников, могут ошибочно захватить птицу или стаю птиц, а истинная цель - БЛА - будет пропущена. Другими словами, ошибочное наведение средства радиолокации на ложную цель приводит к пропуску БЛА.
Третьим недостатком способа-прототипа является необходимость разнесения акустических приемников на значительные расстояния друг от друга. Дело в том, что, согласно способу-прототипу, зона источников акустических сигнатур определяется с помощью многоканальной акустической аппаратуры путем оценки затухания сигналов, принятых на разнесенные по расстоянию акустические приемники.
Четвертым недостатком способа-прототипа является то, что работа используемых акустических приемников нарушается во время выстрелов артиллеристских орудий и подрывов снарядов, что, в свою очередь, приводит к дополнительным пропускам целей.
Третий и четвертый недостатки способа-прототипа обусловлены типом используемых акустических приемников. А именно, поскольку в рамках способа-прототипа оценивается затухание мощности акустического излучения, представляющее собой скалярную величину, используемые акустические приемники измеряют величину акустического давления. При этом измерители акустического давления, такие, как традиционные микрофоны, имеют фундаментальное противоречие между чувствительностью и динамическим диапазоном. Чем выше чувствительность микрофона, тем уже его динамический диапазон, а значит ниже максимальный уровень принимаемых без существенных искажений акустических сигналов. Данное противоречие обусловлено тем, что чувствительный элемент традиционного микрофона всегда имеет подвижную часть, например мембрану, колеблющуюся вместе с изменением акустического давления.
Акустическая скорость частиц (колебательная скорость частиц) - это скорость, с которой движутся по отношению к среде в целом частицы, колеблющиеся около положения равновесия при прохождении акустической волны. Акустическую скорость частиц следует отличать от скорости движения самой среды и от скорости распространения волны. Акустическая скорость частиц является векторной величиной. Известен измерительный преобразователь акустической скорости частиц [4 - патент RU 2697518 C1. Измерительный преобразователь акустической скорости частиц / Деркачёв П.Ю., Косогор А.А., Тихов Ю.И. - Опубл. в Бюл. №23, 2019]. Измерительный преобразователь обеспечивает одновременное увеличение отношения сигнала к шуму, чувствительности и механической прочности измерительного преобразователя акустической скорости частиц на слышимых звуковых частотах. Благодаря отсутствию подвижных чувствительных элементов, измеритель обладает также расширенным динамическим диапазоном.
Технической проблемой, на решение которой направлено настоящее изобретение, является одновременное уменьшение вероятности пропуска целей и уменьшение вероятности ложных срабатываний при всепогодном и всесуточном обнаружении малых БЛА, способных к полетам на малой высоте с низкой скоростью, в том числе в условиях города, вблизи зданий, при наличии пыле-дымовых помех, при наличии летающих птиц (стай птиц или отдельных птиц), в условиях акустических помех, например, типа стадион, рок-концерт, взлетно-посадочная полоса, поле боя, а также исключение значительного пространственного разнесения используемой при осуществлении изобретения аппаратуры.
Для решения указанной технической проблемы предлагается способ обнаружения малых БЛА, при котором принимают электромагнитные волны, отраженные от БЛА, выявляя радиолокационные сигнатуры БЛА, и принимают акустические волны, испускаемые пропеллерами БЛА, выявляя акустические сигнатуры БЛА.
Согласно изобретению, возможны следующие частные случаи осуществления способа обнаружения малых БЛА:
- радиолокационные сигнатуры и акустические сигнатуры объектов, находящихся в воздушном пространстве обзора, принимают одновременно, затем сравнивают принятые сигнатуры указанных объектов с известными сигнатурами БЛА и с известными сигнатурами птиц из библиотеки известных сигнатур, и в случае совпадения сигнатур указанных объектов с, по крайней мере, одной из известных радиолокационных или акустических сигнатур БЛА, выносят решение об обнаружении БЛА, а в случае совпадения сигнатур указанных объектов с, по крайней мере, одной из известных радиолокационных сигнатур птиц, выносят решение о необнаружении БЛА;
- радиолокационные сигнатуры указанных объектов принимают посредством радиолокационных измерений спектрограмм отраженных электромагнитных волн с эффектами Доплера и микро-Доплера, а акустические сигнатуры указанных объектов в виде спектрограмм акустических волн принимают посредством измерений акустической скорости частиц акустических волн;
- в случае если принятые сигнатуры указанных объектов не обладают спектральными признаками принимаемых электромагнитных волн или акустических волн, имеющими место в известных сигнатурах, принятые сигнатуры указанных объектов признают сигнатурами, вызванными иными случайными объектами или явлениями в воздухе и отбрасывают, а в случае если принятые сигнатуры указанных объектов обладают отдельными спектральными признаками принимаемых электромагнитных волн или акустических волн, имеющими место в известных сигнатурах, но в целом не совпадают ни с известными сигнатурами БЛА, ни с известными сигнатурами птиц, принятые сигнатуры указанных объектов признают подозрительными сигнатурами и направляют на рассмотрение оператором, затем, на основе независимого экспертного анализа оператором фактической обстановки в воздушном пространстве обзора, выносят решение либо об обнаружении БЛА с последующим пополнением библиотеки известных сигнатур подозрительной сигнатурой в качестве новой сигнатуры БЛА, либо об обнаружении птиц с последующим пополнением библиотеки известных сигнатур подозрительной сигнатурой в качестве новой сигнатуры птиц, либо о необнаружении с признанием подозрительной сигнатуры фантомной и ее отбрасыванием;
- решение либо об обнаружении БЛА, в том числе с последующим пополнением библиотеки известных сигнатур подозрительной сигнатурой в качестве новой сигнатуры БЛА, либо об обнаружении птиц, в том числе с последующим пополнением библиотеки известных сигнатур подозрительной сигнатурой в качестве новой сигнатуры птиц, либо о необнаружении, в том числе с признанием подозрительной сигнатуры фантомной и ее отбрасыванием, выносят с помощью обучаемой искусственной нейронной сети.
Техническим результатом изобретения является одновременное радиолокационное измерение эффектов Доплера и микро-Доплера, вызываемых полетом БЛА с вращающимися пропеллерами и полетом птиц с взмахами крыльев, и измерение акустической скорости частиц акустических волн, испускаемых вращающимися пропеллерами БЛА, что позволяет выявлять радиолокационные и акустические сигнатуры БЛА и птиц путем сравнения с известными сигнатурами БЛА и птиц из постоянно пополняемой библиотеки известных сигнатур.
Сравнение с известными техническими решениями показывает, что сочетание отличительных признаков и свойств предлагаемого способа соответствует критериям новизны и изобретательского уровня.
Изобретение поясняется на фигуре, где изображена общая конфигурация примера осуществления предлагаемого настоящим изобретением способа (не в масштабе).
При осуществлении предлагаемого способа выполняется следующая последовательность операций.
1. Принимают электромагнитные волны, отраженные от беспилотных летательных аппаратов и принимают акустические волны, испускаемые пропеллерами беспилотных летательных аппаратов.
2. Одновременно принимают радиолокационные сигнатуры и акустические сигнатуры объектов, находящихся в воздушном пространстве обзора. Радиолокационные сигнатуры указанных объектов принимают посредством радиолокационных измерений спектрограмм отраженных электромагнитных волн с эффектами Доплера и микро-Доплера, а акустические сигнатуры указанных объектов в виде спектрограмм акустических волн принимают посредством измерений акустической скорости частиц акустических волн.
3. Сравнивают принятые сигнатуры указанных объектов с известными сигнатурами беспилотных летательных аппаратов и с известными сигнатурами птиц из библиотеки известных сигнатур.
4. В случае совпадения сигнатур указанных объектов с, по крайней мере, одной из известных радиолокационных или акустических сигнатур беспилотных летательных аппаратов, выносят решение об обнаружении беспилотного летательного аппарата, а в случае совпадения сигнатур указанных объектов с, по крайней мере, одной из известных радиолокационных сигнатур птиц, выносят решение о необнаружении беспилотного летательного аппарата.
5. В случае если принятые сигнатуры указанных объектов не обладают спектральными признаками принимаемых электромагнитных волн или акустических волн, имеющими место в известных сигнатурах, принятые сигнатуры указанных объектов признают сигнатурами, вызванными иными случайными объектами или явлениями в воздухе и отбрасывают, а в случае если принятые сигнатуры указанных объектов обладают отдельными спектральными признаками принимаемых электромагнитных волн или акустических волн, имеющими место в известных сигнатурах, но в целом не совпадают ни с известными сигнатурами беспилотных летательных аппаратов, ни с известными сигнатурами птиц, принятые сигнатуры указанных объектов признают подозрительными сигнатурами и направляют на рассмотрение оператором, затем, на основе независимого экспертного анализа оператором фактической обстановки в воздушном пространстве обзора, выносят решение либо об обнаружении беспилотного летательного аппарата с последующим пополнением библиотеки известных сигнатур подозрительной сигнатурой в качестве новой сигнатуры беспилотного летательного аппарата, либо об обнаружении птиц с последующим пополнением библиотеки известных сигнатур подозрительной сигнатурой в качестве новой сигнатуры птиц, либо о необнаружении с признанием подозрительной сигнатуры фантомной и ее отбрасыванием.
6. Выносят с помощью обучаемой искусственной нейронной сети решение либо об обнаружении беспилотного летательного аппарата, в том числе с последующим пополнением библиотеки известных сигнатур подозрительной сигнатурой в качестве новой сигнатуры беспилотного летательного аппарата, либо об обнаружении птиц, в том числе с последующим пополнением библиотеки известных сигнатур подозрительной сигнатурой в качестве новой сигнатуры птиц, либо о необнаружении, в том числе с признанием подозрительной сигнатуры фантомной и ее отбрасыванием.
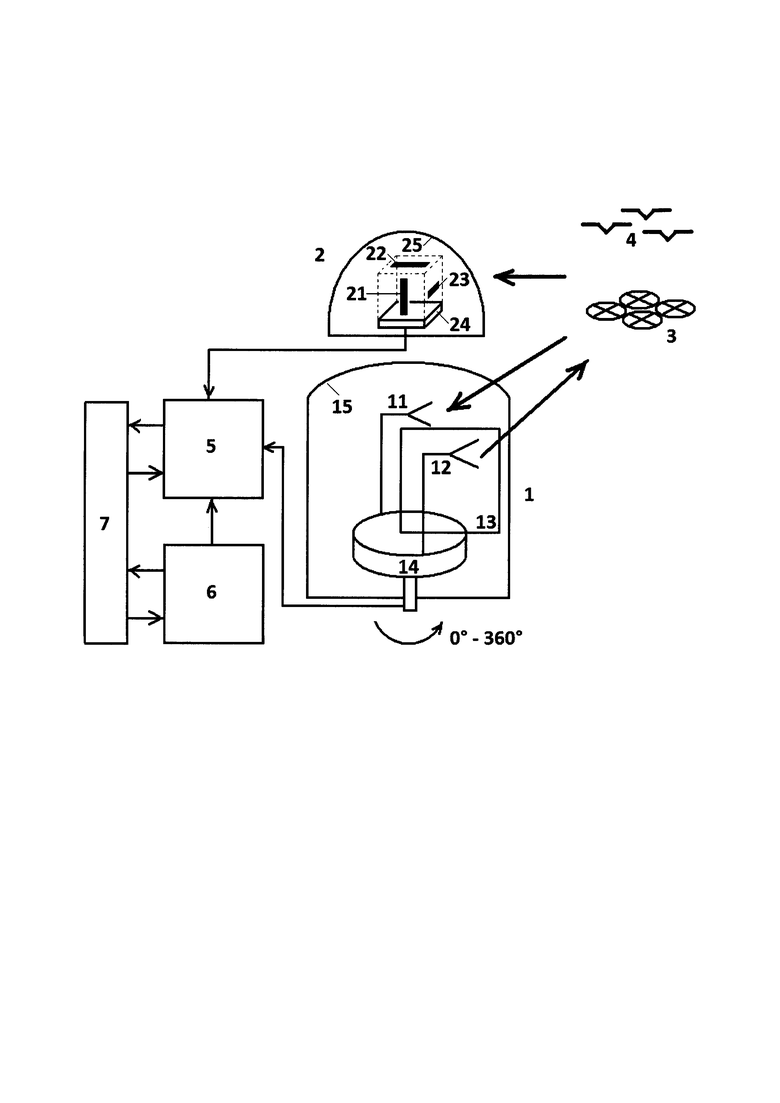
При осуществлении предлагаемого способа (фиг.) одновременно выявляют радиолокационные сигнатуры объектов в воздушном пространстве обзора, принимаемые с помощью радиолокационного измерителя (1), и акустические сигнатуры объектов в воздушном пространстве обзора, принимаемые с помощью измерителя акустической скорости частиц (2). Объектом в воздушном пространстве полагают БЛА (3), стаю птиц или отдельную птицу (4), иной случайный объект или физическое явление в воздухе, непоказанный на фигуре. Сигнатуры, принимаемые радиолокационным измерителем (1), соответствующие физике электромагнитных волн, и сигнатуры, принимаемые измерителем акустической скорости частиц (2), соответствующие физике акустических волн, выявляют с помощью устройства обработки данных (5). Устройству обработки данных (5) обеспечивают доступ к библиотеке известных сигнатур (6), содержащей известные радиолокационные сигнатуры БЛА и птиц (стай птиц или отдельных птиц), а также известные акустические сигнатуры БЛА. С помощью устройства обработки данных (5) сравнивают принимаемые сигнатуры объектов в воздушном пространстве обзора с известными сигнатурами БЛА и с известными сигнатурами птиц. В примере осуществления предлагаемого способа сравнение принимаемых сигнатур с известными сигнатурами осуществляют математическими методами корреляционного анализа спектрограмм электромагнитных волн, а также спектрограмм акустических волн. Существо и особенности указанных математических методов не входят в объем настоящего изобретения.
По результатам сравнения сигнатур, в случае совпадения сигнатур объектов в воздушном пространстве обзора с, по крайней мере, одной из известных радиолокационных или акустических сигнатур БЛА, выносят решение об обнаружении БЛА, а в случае совпадения сигнатур объектов в воздушном пространстве обзора с, по крайней мере, одной из известных радиолокационных сигнатур птиц, выносят решение о необнаружении БЛА. Данные об обнаруженном БЛА, которые могут включать данные о локации обнаруженного БЛА в воздушном пространстве обзора (например, азимут, угол места, дальность), определенные радиолокационным измерителем (1) или измерителем акустической скорости частиц (2), передают в систему управления (7).
Сигнатуры, вызванные иными случайными объектами или явлениями в воздухе, которые не обладают спектральными признаками принимаемых электромагнитных волн или акустических волн, имеющими место в известных сигнатурах, в устройстве обработки данных (5) отбрасываются.
В случае если принятые сигнатуры объектов в воздушном пространстве обзора обладают отдельными спектральными признаками принимаемых электромагнитных волн или акустических волн, имеющими место в известных сигнатурах, но в целом не совпадают ни с известными сигнатурами БЛА, ни с известными сигнатурами птиц, принятые сигнатуры указанных объектов признают подозрительными. Подозрительные сигнатуры направляют из устройства обработки данных (5) в систему управления (7) на рассмотрение оператором, затем, на основе независимого экспертного анализа оператором фактической обстановки в воздушном пространстве обзора, выносят решение либо об обнаружении БЛА с последующим пополнением библиотеки известных сигнатур (6) подозрительной сигнатурой в качестве новой сигнатуры БЛА, либо об обнаружении птиц с последующим пополнением библиотеки известных сигнатур (6) подозрительной сигнатурой в качестве новой сигнатуры птиц, либо о необнаружении с признанием подозрительной сигнатуры фантомной и ее отбрасыванием.
В примере осуществления предлагаемого способа взаимную связь устройства обработки данных (5), библиотеки известных сигнатур (6), системы управления (7), для формирования постоянно уточняемых информационных признаков БЛА и птиц, осуществляют с помощью обучаемой искусственной нейронной сети, что в конечном итоге приводит к уменьшению вероятности пропуска целей и уменьшению вероятности ложных срабатываний.
В процессе обнаружения БЛА радиолокационным измерителем (1) предпочтительно осуществляют механическое сканирование воздушного пространства обзора по азимуту от 0° до 360° в фиксированном секторе углов места. Сектор углов места задают высотой луча и регулировкой ориентации антенн в вертикальной плоскости. При этом с помощью радиолокационного измерителя (1), содержащего не менее двух антенн: приемной антенны (11) и передающей антенны (12), излучают в пространство обзора непрерывную частотно-модулированную зондирующую волну, предпочтительно в наиболее высокочастотной технически доступной части СВЧ диапазона частот, принимают отраженную от объекта в воздухе волну, и формируют спектрограмму эффекта Доплера и микро-Доплера, соответствующую движению объектов. С помощью разделительного экрана (13) обеспечивают высокую развязку приемной (11) и передающей (12) антенн. Передатчик и приемник предпочтительно объединяют в СВЧ приемопередатчик (14). Радиопрозрачный защитный кожух (15) обеспечивает удобство развертывания радиолокационного измерителя (1), например, на крышах зданий или на шасси автомобиля типа пикап. Благодаря использованию высокочастотной части СВЧ диапазона частот, применяют большую абсолютную девиацию частоты модуляции, что обеспечивает высокое пространственное разрешение по дальности. Эффект микро-Доплера проявляется в виде дополнительных спектральных составляющих в отраженной волне, возникающих из-за вращения пропеллеров БЛА или из-за взмахов крыльев птиц, что позволяет получать более информативные сигнатуры БЛА и сигнатуры стай птиц или отдельных птиц. Повышение информативности сигнатур в конечном итоге приводит к уменьшению вероятности пропуска целей и уменьшению вероятности ложных срабатываний.
Радиолокационный измеритель (1) способен функционировать всепогодно и всесуточно, устойчив к воздействию пыле-дымовых и акустических помех, не требует значительного пространственного разнесения входящих в его состав антенн и аппаратуры. Благодаря высокому пространственному разрешению, радиолокационный измеритель (1) обеспечивает дополнительное снижение вероятности пропуска целей при обнаружении мини- и микро-БЛА с эффективной площадью рассеяния от 0,01 до 0,1 м2, способных к полетам на малой высоте с низкой скоростью, в том числе в условиях города, вблизи зданий.
В процессе обнаружения БЛА измерителем акустической скорости частиц (2) сканирования воздушного пространства обзора не требуется. При этом принимают акустические волны, исходящие из любого источника в пространстве обзора с помощью измерителя акустической скорости частиц (2), содержащего не менее трех, расположенных непараллельно друг другу измерительных преобразователей акустической скорости частиц (21, 22, 23), и одного опорного датчика давления (24). Принимаемые акустические сигнатуры БЛА представляют собой спектрограммы акустических волн, возникающих от вращающихся пропеллеров БЛА в полете. Диапазон частот спектрограмм известных мини- и микро-БЛА составляет 30-5000 Гц, что позволяет получать акустические сигнатуры БЛА повышенной информативности. Повышение информативности акустических сигнатур в конечном итоге приводит к уменьшению вероятности пропуска целей и уменьшению вероятности ложных срабатываний при обнаружении малых БЛА, способных к полетам на малой высоте с низкой скоростью, в том числе в условиях города, вблизи зданий.
Благодаря векторным свойствам измеряемой акустической скорости частиц, обеспечивается возможность определять направление на источник звуков без необходимости значительного пространственного разнесения входящих в состав аппаратуры измерительных преобразователей акустической скорости частиц (21, 22, 23). В примере реализации измерителя акустической скорости частиц (2), содержащего три измерительных преобразователя акустической скорости частиц (21, 22, 23), каждый из них располагают предпочтительно ортогонально друг к другу, и все три измерительных преобразователя акустической скорости частиц (21, 22, 23) могут быть размещены практически в непосредственном контакте друг с другом и с опорным датчиком давления (24). Увеличение количества используемых измерительных преобразователей акустической скорости частиц обеспечивает увеличение точности определения направления на источник звуков. При этом очень компактные измерители акустической скорости частиц формируются и при использовании более трех непараллельных измерительных преобразователей акустической скорости частиц. Прозрачный для акустических волн защитный кожух (25) обеспечивает удобство развертывания измерителя акустической скорости частиц (2).
Измеритель акустической скорости частиц (2) способен функционировать всепогодно и всесуточно, устойчив к воздействию пыле-дымовых помех. Благодаря расширенному динамическому диапазону, увеличенному отношению сигнала к шуму, повышенной чувствительности и механической прочности используемых измерительных преобразователей акустической скорости частиц на частотах звучания пропеллеров БЛА, измеритель акустической скорости частиц (2) способен функционировать также в условиях акустических помех, например, типа стадион, рок-концерт, взлетно-посадочная полоса, поле боя.
Иные примеры осуществления заявляемого способа обнаружения малых БЛА могут содержать иные варианты реализации радиолокационного измерителя (1) и измерителя акустической скорости частиц (2), что не выходит за пределы существа и объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Акустический способ обнаружения беспилотных летательных аппаратов | 2020 |
|
RU2749651C1 |
| Мультисенсорный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2757928C1 |
| Способ обнаружения пропеллерных беспилотных летательных аппаратов | 2023 |
|
RU2801201C1 |
| Радиолокационная система сопровождения низколетящих беспилотных летательных аппаратов и объектов | 2017 |
|
RU2737058C2 |
| СПОСОБ И УСТРОЙСТВО МНОГОФАКТОРНОЙ ЗАЩИТЫ ОБЪЕКТОВ ОТ МИНИАТЮРНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2771865C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ВОЗДУШНОГО ПЕРИМЕТРА | 2023 |
|
RU2824853C1 |
| Способ дальнего обнаружения и распознавания малозаметных воздушных целей | 2022 |
|
RU2802089C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2760828C1 |
| УСТРОЙСТВО ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2017 |
|
RU2660998C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2022 |
|
RU2799866C1 |
Изобретение относится к области обнаружения объектов в воздушном пространстве, а более конкретно к способам обнаружения малых беспилотных летательных аппаратов (БЛА) посредством измерения акустической скорости частиц совместно с радиолокационными измерениями. Техническим результатом изобретения является одновременное радиолокационное измерение эффектов Доплера и микро-Доплера, вызываемых полетом БЛА с вращающимися пропеллерами и полетом птиц с взмахами крыльев, и измерение акустической скорости частиц акустических волн, испускаемых вращающимися пропеллерами БЛА, что позволяет выявлять радиолокационные и акустические сигнатуры БЛА и птиц путем сравнения с известными сигнатурами БЛА и птиц из постоянно пополняемой библиотеки известных сигнатур. Для достижения технического результата предлагается способ обнаружения малых БЛА, при котором радиолокационные сигнатуры и акустические сигнатуры объектов, находящихся в воздушном пространстве обзора, принимают одновременно, а затем сравнивают принятые сигнатуры указанных объектов с известными сигнатурами беспилотных летательных аппаратов и с известными сигнатурами птиц. 3 з.п. ф-лы, 1 ил.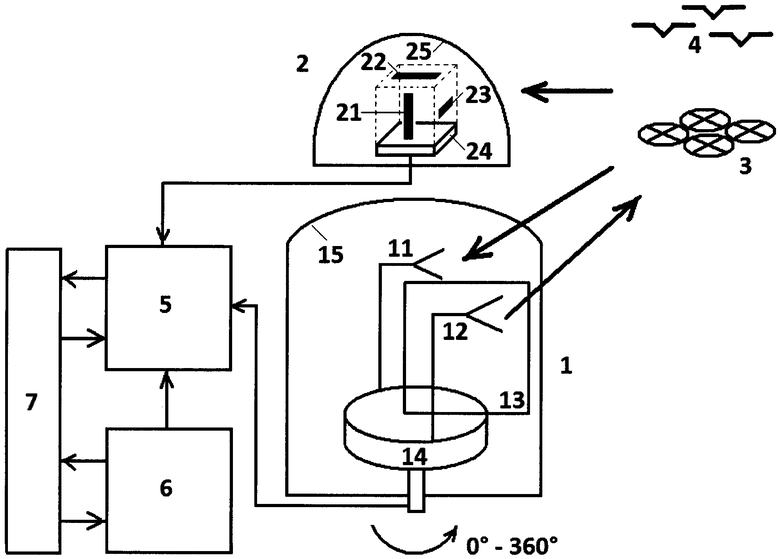
1. Способ обнаружения малых беспилотных летательных аппаратов, при котором принимают электромагнитные волны, отраженные от беспилотных летательных аппаратов, выявляя радиолокационные сигнатуры беспилотных летательных аппаратов, и принимают акустические волны, испускаемые пропеллерами беспилотных летательных аппаратов, выявляя акустические сигнатуры беспилотных летательных аппаратов, отличающийся тем, что радиолокационные сигнатуры и акустические сигнатуры объектов, находящихся в воздушном пространстве обзора, принимают одновременно, затем сравнивают принятые сигнатуры указанных объектов с известными сигнатурами беспилотных летательных аппаратов и с известными сигнатурами птиц из библиотеки известных сигнатур, и в случае совпадения сигнатур указанных объектов с по крайней мере одной из известных радиолокационных или акустических сигнатур беспилотных летательных аппаратов, выносят решение об обнаружении беспилотного летательного аппарата, а в случае совпадения сигнатур указанных объектов с по крайней мере одной из известных радиолокационных сигнатур птиц, выносят решение о необнаружении беспилотного летательного аппарата.
2. Способ по п. 1, отличающийся тем, что радиолокационные сигнатуры указанных объектов принимают посредством радиолокационных измерений спектрограмм отраженных электромагнитных волн с эффектами Доплера и микро-Доплера, а акустические сигнатуры указанных объектов в виде спектрограмм акустических волн принимают посредством измерений акустической скорости частиц акустических волн.
3. Способ по п. 2, отличающийся тем, что в случае если принятые сигнатуры указанных объектов не обладают спектральными признаками принимаемых электромагнитных волн или акустических волн, имеющими место в известных сигнатурах, принятые сигнатуры указанных объектов признают сигнатурами, вызванными иными случайными объектами или явлениями в воздухе и отбрасывают, а в случае если принятые сигнатуры указанных объектов обладают отдельными спектральными признаками принимаемых электромагнитных волн или акустических волн, имеющими место в известных сигнатурах, но в целом не совпадают ни с известными сигнатурами беспилотных летательных аппаратов, ни с известными сигнатурами птиц, принятые сигнатуры указанных объектов признают подозрительными сигнатурами и направляют на рассмотрение оператором, затем, на основе независимого экспертного анализа оператором фактической обстановки в воздушном пространстве обзора, выносят решение либо об обнаружении беспилотного летательного аппарата с последующим пополнением библиотеки известных сигнатур подозрительной сигнатурой в качестве новой сигнатуры беспилотного летательного аппарата, либо об обнаружении птиц с последующим пополнением библиотеки известных сигнатур подозрительной сигнатурой в качестве новой сигнатуры птиц, либо о необнаружении с признанием подозрительной сигнатуры фантомной и ее отбрасыванием.
4. Способ по п. 3, отличающийся тем, что решение либо об обнаружении беспилотного летательного аппарата, в том числе с последующим пополнением библиотеки известных сигнатур подозрительной сигнатурой в качестве новой сигнатуры беспилотного летательного аппарата, либо об обнаружении птиц, в том числе с последующим пополнением библиотеки известных сигнатур подозрительной сигнатурой в качестве новой сигнатуры птиц, либо о необнаружении, в том числе с признанием подозрительной сигнатуры фантомной и ее отбрасыванием, выносят с помощью обучаемой искусственной нейронной сети.
| СИСТЕМА И СПОСОБ ОБНАРУЖЕНИЯ ВИНТОКРЫЛЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2593439C1 |
| Способ обнаружения и поражения малозаметных боевых мини- и микро беспилотных летательных аппаратов | 2018 |
|
RU2695015C1 |
| МЕТОД ОБНАРУЖЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2559332C1 |
| МЕТОД ПОРАЖЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2572924C2 |
| WO 2019091867 A1, 16.05.2019 | |||
| Прессформа для изготовления резиновых образцов | 1952 |
|
SU94690A1 |

