Изобретение относится к области обнаружения объектов в воздушном пространстве, а более конкретно, к мультисенсорным способам обнаружения беспилотных летательных аппаратов (БЛА) посредством измерения акустической скорости частиц совместно с радиолокационными измерениями, и может быть использовано в системах безопасности для предотвращения несанкционированного доступа БЛА в контролируемую зону.
Основными требованиями к способам обнаружения БЛА являются низкая вероятность пропуска целей и низкая вероятность ложных срабатываний. Для удовлетворения указанным требованиям наиболее перспективными представляются мультисенсорные способы. Обнаружение БЛА мультисенсорными способами подразумевает использование различных физических признаков БЛА (сигнатур).
Известен радиолокационный способ обнаружения и классификации БЛА [1 - патент WO2019/091867A1. Radar based system and method for detection of an object and generation of plots holding radial velocity data, and system for detection and classification of unmanned aerial vehicles, UAVs / Wouter Keijer, Gerben Pakkert. - May 16, 2019]. Согласно способу [1], с использованием непрерывного частотно-модулированного электромагнитного зондирующего сигнала осуществляют сканирование воздушного пространства обзора и, измеряя эффект Доплера отраженного электромагнитного сигнала, обнаруживают БЛА.
Недостатком приведенного способа [1] является высокая вероятность пропуска целей в городских условиях, когда БЛА пролетает на малой высоте с низкой скоростью вблизи зданий.
Известен акустический способ обнаружения БЛА с использованием цифровых средств фильтрации фоновых звуковых помех [2 - патент US10032464B2. Drone detection and classification with compensation for background clutter sources / John Franklin, Brian Hearing. - July 24, 2018]. Способ [2] позволяет обнаруживать БЛА, пролетающих на малой высоте с низкой скоростью, в том числе вблизи зданий. Согласно способу [2], с помощью микрофона принимают звуковой сигнал, с помощью звуковой карты компьютера осуществляют цифровую запись сигнала и сохраняют в памяти компьютера различные образцы звуковых сигнатур как БЛА, так и источников фоновых звуков. Для разделения акустических сигнатур БЛА от сигнатур источников фоновых звуков применяют частотно-временной анализ оцифрованных звуковых сигналов.
Недостатком способа [2] является то, что обнаружение тихо звучащих БЛА нарушается во время воздействия сильных подавляющих звуковых помех, что приводит к пропускам целей, например, в условиях типа стадион, рок-концерт, взлетно-посадочная полоса, поле боя. Указанный недостаток способа [2] обусловлен тем, что традиционные микрофоны имеют фундаментальное противоречие между чувствительностью и динамическим диапазоном. Чем выше чувствительность микрофона в рабочем диапазоне частот, тем уже его динамический диапазон, а значит ниже максимальный уровень принимаемых без существенных искажений акустических сигналов. Данное противоречие обусловлено тем, что чувствительный элемент традиционного микрофона всегда имеет подвижную часть, например мембрану, колеблющуюся вместе с изменением акустического давления.
Наиболее близким аналогом (прототипом) предложенного изобретения является способ обнаружения малых БЛА, при котором принимают одновременно радиолокационные сигнатуры и акустические сигнатуры объектов, находящихся в воздушном пространстве обзора [3 - патент RU 2735070 C1. Способ обнаружения малых беспилотных летательных аппаратов / Деркачев П.Ю., Косогор АА., Тихов Ю.И. - Опубл. в Бюл. №30, 2020]. Согласно способу-прототипу [3], радиолокационные сигнатуры принимают посредством радиолокационных измерений спектрограмм отраженных электромагнитных волн с эффектами Доплера и микро-Доплера, а акустические сигнатуры в виде спектрограмм акустических волн принимают посредством измерений акустической скорости частиц. Акустическая скорость частиц (колебательная скорость частиц) - это скорость, с которой движутся по отношению к среде в целом частицы, колеблющиеся около положения равновесия при прохождении акустической волны. Акустическую скорость частиц следует отличать от скорости движения самой среды и от скорости распространения волны. Акустическая скорость частиц является векторной величиной. Известен измерительный преобразователь акустической скорости частиц [4 - патент RU 2697518 C1. Измерительный преобразователь акустической скорости частиц / Деркачев П.Ю., Косогор А.А., Тихов Ю.И. - Опубл. в Бюл. №23, 2019]. Благодаря отсутствию подвижных чувствительных элементов, измерительный преобразователь обладает расширенным динамическим диапазоном на слышимых звуковых частотах.
Недостатком способа-прототипа [3] является то, что прием слабых звуковых сигналов, исходящих от БЛА при наличии фоновых маскирующих и имитирующих звуковых помех, приводит к увеличению вероятности пропуска целей и увеличению вероятности ложных срабатываний. Примерами фоновых маскирующих и имитирующих звуковых помех являются сравнительно слабые звуки газонокосилки, вентиляционного оборудования, некоторых строительных инструментов и оборудования, близлежащих автотрасс. Частотный спектр фоновых маскирующих и имитирующих звуковых помех частично совпадает с частотами акустических волн, испускаемых БЛА, что приводит к перекрытию акустических спектрограмм БЛА и источников фоновых маскирующих и имитирующих звуковых помех.
Технической проблемой, на решение которой направлено настоящее изобретение, является уменьшение вероятности пропуска целей и уменьшение вероятности ложных срабатываний при обнаружении БЛА, способных к полетам на малой высоте с низкой скоростью, в том числе в условиях города, вблизи зданий, в условиях сильных подавляющих звуковых помех, например, типа стадион, рок-концерт, взлетно-посадочная полоса, поле боя, а также при наличии источников фоновых маскирующих и имитирующих звуковых помех, таких как газонокосилка, вентиляционное оборудование, строительные инструменты и оборудование, близлежащая автотрасса и иные источники звуков.
Настоящее изобретение развивает способ-прототип [3], являющийся также изобретением данных авторов и патентообладателя, содержание которого частично включено в настоящее описание в качестве ссылки.
Для решения указанной технической проблемы предлагается мультисенсорный способ обнаружения БЛА, при котором принимают электромагнитные волны, отраженные от БЛА, выявляя радиолокационные сигнатуры БЛА, и принимают акустические волны, испускаемые пропеллерами БЛА, выявляя акустические сигнатуры БЛА.
Согласно изобретению, способ характеризуется следующими признаками, в том числе частными случаями осуществления мультисенсорного способа обнаружения БЛА:
- радиолокационные сигнатуры БЛА принимают посредством измерений спектрограмм отраженных электромагнитных волн с эффектом Доплера, и одновременно принимают акустические сигнатуры БЛА в виде спектрограмм акустических волн посредством измерений акустической скорости частиц акустических волн с эффектом Доплера, осуществляют цифровую запись указанных спектрограмм, затем сравнивают записанные спектрограммы электромагнитных волн и акустических волн в пределах регулируемого интервала времени, начиная с заданного начального момента обзора, и в случае корреляции эффекта Доплера принимаемых электромагнитных волн и акустических волн, выносят решение об обнаружении БЛА, категорированном с низкой вероятностью ложных срабатываний;
- в случае если принята, по крайней мере, одна радиолокационная сигнатура БЛА или, по крайней мере, одна акустическая сигнатура БЛА, а указанная корреляция эффекта Доплера принимаемых электромагнитных волн и акустических волн не проявляется, выносят решение об обнаружении БЛА, категорированном с низкой вероятностью пропуска цели.
Техническим результатом изобретения является одновременное измерение спектрограмм электромагнитных волн и акустических волн, с выявлением корреляции эффекта Доплера, вызываемого движением БЛА в полете, относительно радиолокационных средств измерений электромагнитных волн и средств измерений акустической скорости частиц акустических волн.
Сравнение с известными техническими решениями показывает, что сочетание отличительных признаков и свойств предлагаемого способа из доступной литературы не известно, и предлагаемый способ соответствует критериям новизны и изобретательского уровня.
Изобретение поясняется чертежом, где изображена общая конфигурация примера осуществления предлагаемого способа (не в масштабе).
При осуществлении предлагаемого способа выполняется следующая последовательность операций.
1. Принимают электромагнитные волны, отраженные от беспилотных летательных аппаратов и принимают акустические волны, испускаемые пропеллерами беспилотных летательных аппаратов.
2. Одновременно принимают радиолокационные сигнатуры и акустические сигнатуры беспилотных летательных аппаратов. Радиолокационные сигнатуры беспилотных летательных аппаратов принимают посредством измерений спектрограмм отраженных электромагнитных волн с эффектом Доплера, а акустические сигнатуры беспилотных летательных аппаратов в виде спектрограмм акустических волн принимают посредством измерений акустической скорости частиц акустических волн с эффектом Доплера.
3. Осуществляют цифровую запись указанных спектрограмм.
4. Сравнивают записанные спектрограммы электромагнитных волн и акустических волн в пределах регулируемого интервала времени, начиная с заданного начального момента обзора.
5. В случае корреляции эффекта Доплера принимаемых электромагнитных волн и акустических волн, выносят решение об обнаружении беспилотного летательного аппарата, категорированном с низкой вероятностью ложных срабатываний.
6. В случае если принята, по крайней мере, одна радиолокационная сигнатура беспилотного летательного аппарата или, по крайней мере, одна акустическая сигнатура беспилотного летательного аппарата, а указанная корреляция эффекта Доплера принимаемых электромагнитных волн и акустических волн не проявляется, выносят решение об обнаружении беспилотного летательного аппарата, категорированном с низкой вероятностью пропуска цели.
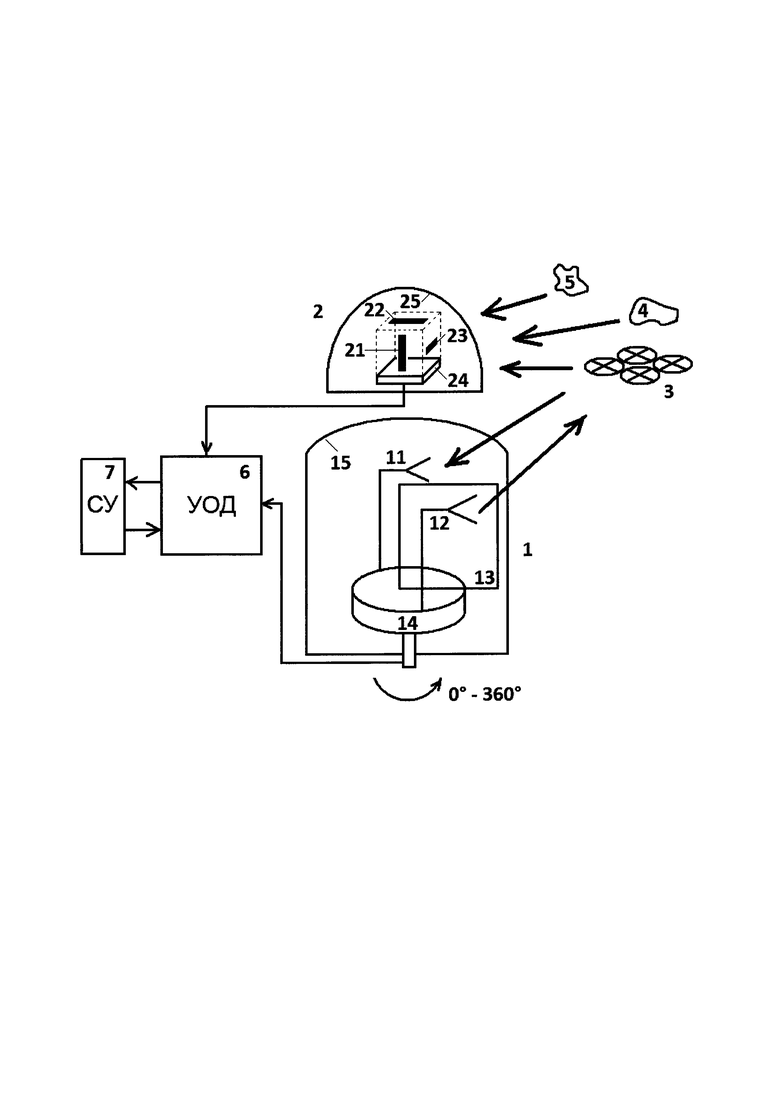
При осуществлении предлагаемого способа (чертеж) одновременно выявляют радиолокационные сигнатуры объектов в воздушном пространстве обзора, принимаемые с помощью радиолокационного измерителя (1), и акустические сигнатуры объектов в воздушном пространстве обзора, принимаемые с помощью измерителя акустической скорости частиц (2). Объектом полагают БЛА (3), источник сильных подавляющих звуковых помех (4), источник фоновых маскирующих и имитирующих звуковых помех (5). Под сильными подавляющими звуковыми помехами здесь понимаются звуковые волны высокой интенсивности на частотах, отличных от частот акустических волн, испускаемых БЛА. А под фоновыми маскирующими и имитирующими звуковыми помехами здесь понимаются звуковые волны сравнительно низкой интенсивности, но с частотами, которые могут перекрывать частоты акустических волн, испускаемых БЛА.
Сигнатуры, принимаемые радиолокационным измерителем (1), соответствующие физике электромагнитных волн, и сигнатуры, принимаемые измерителем акустической скорости частиц (2), соответствующие физике акустических волн, поступают на вход устройства обработки данных (УОД) (6).
В УОД (6) осуществляют запись указанных сигнатур в цифровом виде спектрограмм. Затем, с помощью УОД (6) сравнивают записанные спектрограммы электромагнитных волн и акустических волн в частотно-временной области в пределах регулируемого интервала времени, начиная с заданного начального момента обзора воздушного пространства. Регулировку указанного интервала времени и задавание соответствующего начального момента обзора воздушного пространства осуществляют с помощью системы управления (СУ) (7). Уточняемые в процессе обнаружения БЛА данные о начальном моменте и интервале времени обзора поступают от СУ (7) в УОД (6). По результатам сравнения спектрограмм, в случае корреляции эффекта Доплера принимаемых электромагнитных волн и акустических волн, выносят решение об обнаружении БЛА. Сигнал об обнаружении БЛА поступает от УОД (6) в СУ (7). При этом в СУ (7) данное обнаружение БЛА категорируется как обнаружение с низкой вероятностью ложных срабатываний.
В случае если принята, по крайней мере, одна радиолокационная сигнатура БЛА или, по крайней мере, одна акустическая сигнатура БЛА, а указанная корреляция эффекта Доплера принимаемых электромагнитных волн и акустических волн не проявляется, также выносят решение об обнаружении БЛА. В СУ (7) такое обнаружение БЛА категорируется как обнаружение с низкой вероятностью пропуска цели.
Категорирование обнаружений БЛА используют при выборе вариантов реагирования на обнаружение БЛА. А именно, категорированную оценку вероятности пропуска целей и вероятности ложных срабатываний используют при выборе вариантов реагирования на обнаружение БЛА в зависимости от оперативно-тактической ситуации. Существо и особенности вариантов реагирования на обнаружение БЛА не входят в объем настоящего изобретения. Данные об обнаруженном БЛА, которые могут включать данные о локации обнаруженного БЛА в воздушном пространстве обзора (например, азимут, угол места, дальность), определенные радиолокационным измерителем (1) или измерителем акустической скорости частиц (2), посредством УОД (6) передают в СУ (7).
При полете в воздушном пространстве обзора, движение БЛА относительно радиолокационного измерителя (1) вызывает эффект Доплера электромагнитных волн. При приближении БЛА к радиолокационному измерителю (1) частота принимаемых электромагнитных волн, отраженных от БЛА, возрастает. А при удалении БЛА от радиолокационного измерителя (1) частота принимаемых электромагнитных волн, отраженных от БЛА, уменьшается. Чем быстрее движется БЛА, тем значительнее изменяется частота электромагнитных волн, регистрируемая приемником радиолокационного измерителя (1). В случае, если БЛА неподвижен относительно радиолокационного измерителя (1), эффект Доплера не проявляется. Соответственно, измерение эффекта Доплера, вызванного полетом БЛА с низкой относительной скоростью, затрудняется. Радиолокационные измерения затрудняются также при полете БЛА на малой высоте из-за приема отражений зондирующих электромагнитных волн от поверхности земли. При пролете БЛА вблизи зданий радиолокационные измерения затрудняются из-за отражений зондирующих электромагнитных волн от зданий. В то же время, наличие в воздушном пространстве обзора источников сильных подавляющих звуковых помех (4) и источников фоновых маскирующих и имитирующих звуковых помех (5) практически не влияет на радиолокационные измерения.
Движение БЛА относительно измерителя акустической скорости частиц (2) вызывает эффект Доплера акустических волн. При приближении БЛА к измерителю акустической скорости частиц (2) частота принимаемых акустических волн, испускаемых БЛА, возрастает. А при удалении БЛА от измерителя акустической скорости частиц (2) частота принимаемых акустических волн, испускаемых БЛА, уменьшается. Измерение эффекта Доплера акустических волн, вызванного полетом БЛА с низкой относительной скоростью, затрудняется подобно измерению эффекта Доплера электромагнитных волн. В отличие от радиолокационных измерений, ввиду отсутствия зондирующих акустических волн и благодаря иной физике акустических волн, влияние отражений от земной поверхности и зданий акустических волн, испускаемых БЛА, не является критическим и может быть учтено аппаратными и программными средствами УОД (6). При этом наличие в воздушном пространстве обзора источников сильных подавляющих звуковых помех (4) и источников фоновых маскирующих и имитирующих звуковых помех (5) влияет на акустические измерения.
Сравнение спектрограмм электромагнитных волн и акустических волн с помощью УОД (6), благодаря выявлению корреляции эффекта Доплера, вызываемого движением БЛА в воздушном пространстве обзора относительно радиолокационного измерителя (1) и относительно измерителя акустической скорости частиц (2), позволяет разделить акустические сигнатуры БЛА от акустических сигнатур источников фоновых маскирующих и имитирующих звуковых помех (5). В свою очередь, разделение акустических сигнатур БЛА от акустических сигнатур источников фоновых маскирующих и имитирующих звуковых помех (5) снижает вероятность ложных срабатываний и вероятность пропуска целей.
В примере осуществления предлагаемого способа сравнение спектрограмм электромагнитных волн и акустических волн в частотно-временной области осуществляют математическими методами корреляционного анализа. Существо и особенности указанных математических методов не входят в объем настоящего изобретения.
В целом, благодаря тому, что наличие в воздушном пространстве обзора источников сильных подавляющих звуковых помех (4) и источников фоновых маскирующих и имитирующих звуковых помех (5) не мешает радиолокационным измерениям, а влияние отражений от земной поверхности и зданий акустических волн, испускаемых БЛА, при отсутствии зондирующих акустических волн не является критическим для акустических измерений, мультисенсорное сочетание радиолокационных и акустических измерений обеспечивает уменьшение вероятности пропуска целей и уменьшение вероятности ложных срабатываний при обнаружении БЛА, способных к полетам на малой высоте с низкой скоростью, в том числе в условиях города, вблизи зданий, в условиях сильных подавляющих звуковых помех, например, типа стадион, рок-концерт, взлетно-посадочная полоса, поле боя, а также при наличии источников фоновых маскирующих и имитирующих звуковых помех, таких как газонокосилка, вентиляционное оборудование, строительные инструменты и оборудование, близлежащая автотрасса и иные источники звуков.
В процессе обнаружения БЛА радиолокационным измерителем (1) предпочтительно осуществляют механическое сканирование воздушного пространства обзора по азимуту от 0° до 360° в фиксированном секторе углов места. Сектор углов места задают высотой луча и регулировкой ориентации антенн в вертикальной плоскости. При этом с помощью радиолокационного измерителя (1), содержащего не менее двух антенн: приемной антенны (11) и передающей антенны (12), излучают в пространство обзора непрерывную частотно-модулированную зондирующую волну, предпочтительно в наиболее высокочастотной технически доступной части СВЧ диапазона частот, принимают отраженную от БЛА волну, и формируют спектрограмму с эффектом Доплера, вызванным относительным движением БЛА. С помощью разделительного экрана (13) обеспечивают высокую развязку приемной (11) и передающей (12) антенн. Передатчик и приемник предпочтительно объединяют в СВЧ приемопередатчик (14). Радиопрозрачный защитный кожух (15) обеспечивает удобство развертывания радиолокационного измерителя (1), например, на крышах зданий или на шасси автомобиля типа пикап. Благодаря использованию высокочастотной части СВЧ диапазона частот, применяют большую абсолютную девиацию частоты модуляции, что обеспечивает высокое пространственное разрешение по дальности. Благодаря высокому пространственному разрешению, радиолокационный измеритель (1) обеспечивает дополнительное снижение вероятности пропуска целей при обнаружении мини- и микро-БЛА с эффективной площадью рассеяния от 0,01 м2 до 0,1 м2, способных к полетам на малой высоте с низкой скоростью, в том числе в условиях города, вблизи зданий.
В процессе обнаружения БЛА измерителем акустической скорости частиц (2) сканирования воздушного пространства обзора не требуется. При этом принимают акустические волны, исходящие из любого источника в пространстве обзора, с помощью измерителя акустической скорости частиц (2), содержащего не менее трех расположенных непараллельно друг другу измерительных преобразователей акустической скорости частиц (21, 22, 23), и одного опорного датчика давления (24). Принимаемые акустические сигнатуры БЛА представляют собой спектрограммы акустических волн, возникающих от вращающихся пропеллеров БЛА в полете. Диапазоны частот акустических спектрограмм известных БЛА преимущественно находятся в пределах от 30 Гц до 5000 Гц.
В примере реализации измерителя акустической скорости частиц (2), содержащего три измерительных преобразователя акустической скорости частиц (21, 22, 23), каждый из них располагают предпочтительно ортогонально друг к другу, и все три измерительных преобразователя акустической скорости частиц (21, 22, 23) могут быть размещены практически в непосредственном контакте друг с другом и с опорным датчиком давления (24). Увеличение количества используемых измерительных преобразователей акустической скорости частиц обеспечивает увеличение точности определения направления на источник звуков. При этом очень компактные измерители акустической скорости частиц формируются и при использовании более трех непараллельных измерительных преобразователей акустической скорости частиц. Прозрачный для акустических волн защитный кожух (25) обеспечивает удобство развертывания измерителя акустической скорости частиц (2).
Благодаря расширенному динамическому диапазону и механической прочности используемых измерительных преобразователей акустической скорости частиц, измеритель акустической скорости частиц (2) обеспечивает дополнительное снижение вероятности пропуска целей при наличии источников сильных подавляющих звуковых помех (4), например, типа стадион, рок-концерт, взлетно-посадочная полоса, поле боя.
Иные примеры осуществления заявляемого мультисенсорного способа обнаружения БЛА могут содержать иные варианты реализации радиолокационного измерителя (1) и измерителя акустической скорости частиц (2), что не выходит за пределы существа и объема настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обнаружения пропеллерных беспилотных летательных аппаратов | 2023 |
|
RU2801201C1 |
| Акустический способ обнаружения беспилотных летательных аппаратов | 2020 |
|
RU2749651C1 |
| Способ обнаружения малых беспилотных летательных аппаратов | 2020 |
|
RU2735070C1 |
| СПОСОБ И УСТРОЙСТВО МНОГОФАКТОРНОЙ ЗАЩИТЫ ОБЪЕКТОВ ОТ МИНИАТЮРНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2771865C1 |
| УСТРОЙСТВО ЗАХВАТА БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2017 |
|
RU2660998C1 |
| Способ и устройство противодействия беспилотным летательным аппаратам | 2023 |
|
RU2818398C1 |
| Способ дальнего обнаружения и распознавания малозаметных воздушных целей | 2022 |
|
RU2802089C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ОХРАНЫ ВОЗДУШНОГО ПЕРИМЕТРА | 2023 |
|
RU2824853C1 |
| Радиолокационный способ обнаружения беспилотных летательных аппаратов | 2021 |
|
RU2760828C1 |
| Радиолокационная станция | 2016 |
|
RU2618521C1 |
Изобретение относится к области обнаружения объектов в воздушном пространстве, а более конкретно к мультисенсорным способам обнаружения беспилотных летательных аппаратов (БЛА) посредством измерения акустической скорости частиц совместно с радиолокационными измерениями, и может быть использовано в системах безопасности для предотвращения несанкционированного доступа БЛА в контролируемую зону. Техническим результатом изобретения является снижение вероятности ложных срабатываний и вероятности пропуска цели. В заявленном способе принимают радиолокационные сигнатуры БЛА посредством измерений спектрограмм отраженных электромагнитных волн с эффектом Доплера и одновременно принимают акустические сигнатуры БЛА в виде спектрограмм акустических волн посредством измерений акустической скорости частиц акустических волн с эффектом Доплера. Затем сравнивают спектрограммы электромагнитных волн и акустических волн в пределах регулируемого интервала времени, начиная с заданного начального момента обзора. В случае корреляции эффекта Доплера принимаемых электромагнитных волн и акустических волн выносят решение об обнаружении беспилотного летательного аппарата, категорированном с низкой вероятностью ложных срабатываний. 1 з.п. ф-лы, 1 ил.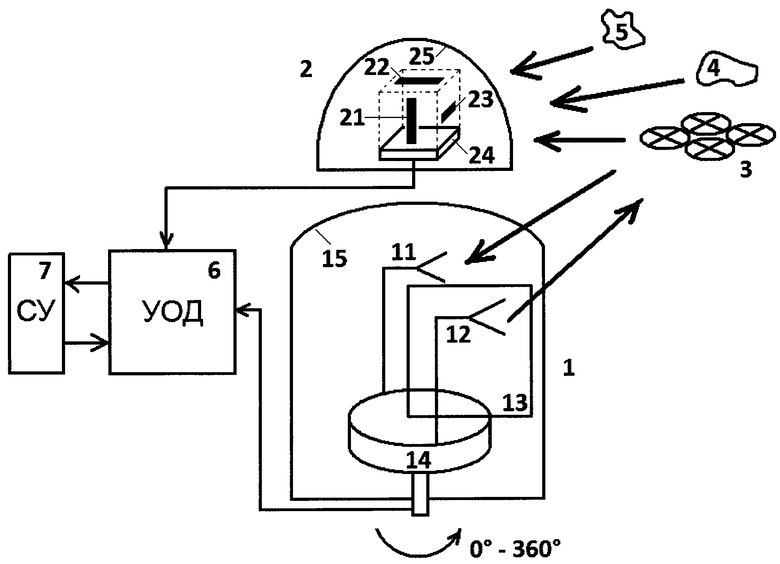
1. Мультисенсорный способ обнаружения беспилотных летательных аппаратов, при котором принимают электромагнитные волны, отраженные от беспилотных летательных аппаратов, выявляя радиолокационные сигнатуры беспилотных летательных аппаратов, и принимают акустические волны, испускаемые пропеллерами беспилотных летательных аппаратов, выявляя акустические сигнатуры беспилотных летательных аппаратов, отличающийся тем, что радиолокационные сигнатуры беспилотных летательных аппаратов принимают посредством измерений спектрограмм отраженных электромагнитных волн с эффектом Доплера, и одновременно принимают акустические сигнатуры беспилотных летательных аппаратов в виде спектрограмм акустических волн посредством измерений акустической скорости частиц акустических волн с эффектом Доплера, осуществляют цифровую запись указанных спектрограмм, затем сравнивают записанные спектрограммы электромагнитных волн и акустических волн в пределах регулируемого интервала времени, начиная с заданного начального момента обзора, и в случае корреляции эффекта Доплера принимаемых электромагнитных волн и акустических волн выносят решение об обнаружении беспилотного летательного аппарата, категорированном с низкой вероятностью ложных срабатываний.
2. Мультисенсорный способ по п. 1, отличающийся тем, что, в случае если принята, по крайней мере, одна радиолокационная сигнатура беспилотного летательного аппарата или, по крайней мере, одна акустическая сигнатура беспилотного летательного аппарата, а указанная корреляция эффекта Доплера принимаемых электромагнитных волн и акустических волн не проявляется, выносят решение об обнаружении беспилотного летательного аппарата, категорированном с низкой вероятностью пропуска цели.
| Способ обнаружения малых беспилотных летательных аппаратов | 2020 |
|
RU2735070C1 |
| СПОСОБ РАДИОМОНИТОРИНГА РАДИОМОЛЧАЩИХ ОБЪЕКТОВ | 2014 |
|
RU2571950C1 |
| СПОСОБ И УСТРОЙСТВО АКУСТИЧЕСКОГО ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2015 |
|
RU2589290C1 |
| Способ обнаружения и поражения малозаметных боевых мини- и микро беспилотных летательных аппаратов | 2018 |
|
RU2695015C1 |
| МЕТОД ОБНАРУЖЕНИЯ МАЛОГАБАРИТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2559332C1 |
| WO 2019091867 A1, 16.05.2019 | |||
| US 10032464 B2, 24.07.2018 | |||
| WO 2020144245 A1, 16.07.2020 | |||
| US 2015302858 A1, 22.10.2015. | |||

