Изобретение относится к области робототехники, а именно к навигационному обеспечению маршрута автономного необитаемого подводного аппарата (АНПА) и средствам для его осуществления. Изобретение может быть использовано для осуществления предварительной прокладки маршрута для самостоятельного перехода в подводном положении АНПА в район предназначения с учетом факторов, ограничивающих его свободное маневрирование на протяжении всего маршрута.
Известна система планирования маршрута судна Navi-Planner 4000, которая разработана российской компанией «TRANZAS» (А.Д. Акмайкин, Д.Б. Хоменко, С.Ф. Клюева. Обзор функциональных возможностей и перспективы современных автоматизированных систем планирования маршрута судна // Вестник государственного университета морского и речного флота имени адмирала С.О. Макарова. Том 9. - 2017. - №5. - С. 237-251.). Данная система позволяет обеспечить безопасную и эффективную предварительную прокладку, а также выполнение плана перехода судна по маршруту. С точки зрения функциональности система Navi-Planner 4000 представляет собой приложение обработки электронных карт ЭКНИС, а также набор баз данных, приложений и сервисов, необходимых при выполнении предварительной прокладки. Система подходит как для использования на судне в качестве дублирующего приложения, так и для применения на берегу в качестве административного инструмента. Программное обеспечение Navi-Planner 4000 создает план перехода на основе электронного редактора курса, включающего:
- предварительную прокладку от порта к порту;
- автоматическую предварительную прокладку;
- контроль глубины под килем и просвета прохода под мостами;
- проверку предварительной прокладки на предмет навигационных опасностей и информирование о найденных опасностях;
- автоматический расчет опорных точек;
- точки предоставления докладов по радио;
- списки карт ENC и SENC для бумажных и электронных карт;
- экспорт/импорт предварительной прокладки;
- интеграцию с системой Navi-Sailor 4000 ЭКНИС;
- возможность получения онлайн корректуры бумажных карт и извещений от компании Thomas Gunn Technologies;
- создание плана перехода от порта к порту и от причала до причала;
- поддержку процедур ISM и управления судном.
Система Navi-Planner 4000 позволяет построить быстрый маршрут на основе таблиц расстояний из точки А в точку В через точку С. Маршруты рассчитываются на базе таблиц морских дистанций компании AtoBviaC и могут применяться для быстрого расчета расстояний, выбора электронных карт формата (S)ENC и их последующего приобретения, а также использоваться для детального выполнения предварительной прокладки и последующего создания плана рейса. Таблицы расстояний из точки А в точку В, через точку С предлагают разнообразные варианты формирования маршрутов и правила построения маршрута. Погодная функциональность в системе Navi-Planner 4000 обеспечивает судоводителя инструментом по принятию оптимального решения при планировании маршрута с учетом погодных условий, оптимизируя при этом скорость и расход топлива, а также условия обеспечения безопасности мореплавания, экипажа судна и перевозимого груза.
Данные о погоде поступают от метеорологической службы Meteo Consult. Поступающая информация включает следующие данные: давление воздуха, прогнозы ветра и волн, прогнозы тропических циклонов, температур, атмосферных осадков и границ льда.
К недостаткам известного способа следует отнести необходимость периодичной связи с глобальной сетью Интернет для корректуры морских навигационных карт и получения прогнозов погоды с целью корректуры плана перехода, а также отслеживание местоположения судна только с помощью космических навигационных систем и невозможность учета факторов, ограничивающих возможность его свободного маневрирования (районы интенсивного судоходства и рыболовства, районы мусорных образований, районы, закрытые для плавания судов гражданских ведомств, районы дежурств военных кораблей иностранных государств).
Известен также способ определения наивыгоднейшего оптимального пути судна в зависимости от гидрометеорологических факторов (патент РФ №2570707, МПК G01C 21/00, В63В 51/00, опуб. 10.12.2015 г.), разработанный в открытом акционерном обществе «Государственный научно-исследовательский навигационно-гидрографический институт» (ОАО «ГНИНГИ»). Суть данного способа заключается в следующем. Перед выходом в море и в процессе плавания по маршруту посредством судовой аппаратуры приема и обработки метеорологической спутниковой информации, включающей комплекс программно-аппаратных средств обработки и представления гидрометеорологической информации и обеспечивающей прием APT, WEFAX, HRPT сигналов от среднеорбитальных метеорологических искусственных спутников Земли (ИСЗ) в диапазоне 137-138 МГц и от 1690 до 1710 МГц, получают параметры гидрометеорологических характеристик по маршруту движения. В ЭВМ на основе полученных гидрометеорологических данных выполняется расчет климатического пути судна, который в дальнейшем является «осью» для расчета оптимального пути, а за основу расчета может быть также взята дуга большого круга. При этом получают от внешних источников трех или пятисуточный прогноз волнения, рассчитывают величины ветроволновых потерь скорости судна для различных курсов на первые, вторые, третьи сутки плавания, посредством ЭВМ перебирают большое количество вариантов, концы суточных плаваний соединяют кривой линией - изохроной, при этом некоторая из точек изохроны, построенной на конец третьих суток, окажется ближе к пункту прихода, при этом курс судна располагают так, чтобы выйти в эту ближайшую точку, с получением нового прогноза вычисления повторяются. Посредством ЭВМ также выполняют оценку ветроволновых потерь скорости судна по величине X, равной отношению суммарной длины траектории судна, проходящей через области с неблагоприятными условиями к общей длине траектории L.
По маршруту следования судна также определяют цикличность штормов и функции распределения их количества и непрерывной продолжительности путем построения имитационной модели штормов и окон погоды. Для этого в качестве исходных данных о состоянии природной среды достаточно иметь сведения об интегральной повторяемости штормов, которые приведены в многочисленных пособиях по режиму ветра и волнения и которые хранятся в электронном виде в ПЗУ системы «Прогноз». Для построения модели используются сведения о статистических связях повторяемости штормов со средними значениями количества штормов и их непрерывной продолжительности, а также статистические связи между функциями распределения числа штормов и их непрерывной продолжительности со средними значениями количества штормов и их непрерывной продолжительности.
Известный способ является наиболее близким по технической сущности к заявляемому способу и принят в качестве прототипа.
К недостаткам данного способа следует отнести то, что при формировании маршрута он учитывает только один фактор, ограничивающий свободное маневрирование, связанный с неблагоприятными гидрометеорологическими условиями, а также необходимость связи со среднеорбитальными метеорологическими искусственными спутниками Земли для приема гидрометеорологической информации. Кроме того, не обеспечивается необходимая степень безопасности перехода АНПА по маршруту и исключается использование в глубоководных комплексах.
В основу изобретения поставлена задача разработать способ построения предварительной прокладки маршрута автономного необитаемого подводного аппарата, обеспечивающий повышение возможности безопасного прохождения маршрута АНПА за счет снижения возможности взаимодействия с ограничивающими свободное маневрирование факторами.
Поставленная задача достигается тем, что в способе построения предварительной прокладки маршрута автономного необитаемого подводного аппарата (АНПА), при котором получают предварительные параметры гидрометеорологических характеристик и параметры факторов, ограничивающих возможность его свободного маневрирования, вводят полученные исходные данные в ЭВМ, производят вычисление координат и прокладывают маршрут движения, дополнительно на морскую навигационную карту наносят обстановку факторов, ограничивающих свободное маневрирование АНПА, преимущественно стационарной системой освещения подводной обстановки (ССОПО), затем на внутреннею рамку морской навигационной карты с нанесенной обстановкой факторов, ограничивающих возможность его свободного маневрирования, наносят сетку прямоугольных координат, с помощью которой осуществляют переход от географических координат морской навигационной карты к прямоугольным координатам сетки, при этом нулевые координаты сетки совмещают с верхними левыми координатами морской навигационной карты. После чего визуально на карте определяют и выделяют квадраты с абсолютным и временным запретом на прохождение в них АНПА, квадраты, запретные для всплытия АНПА в надводное положение на сеанс связи и определения места, вычисляют координаты этих квадратов, вводят данные в ЭВМ и выполняют расчет вероятности безопасного прохождения АНПА в каждой точке сетки прямоугольных координат, относительно ССОПО. Затем вычисляют точки с наименьшей вероятностью взаимодействия с ССОПО и с учетом выявленных квадратов с абсолютным и временным запретом на прохождение в них АНПА, координаты квадратов, запретных для всплытия АНПА в надводное положение на сеанс связи и определения места. После чего осуществляют обратный переход от прямоугольных координат сетки к географическим координатам морской навигационной карты и получают географические координаты выявленных точек, по которым выполняют предварительную прокладку маршрута АНПА.
Поставленная задача достигается также тем, что вертикальные и горизонтальные линии сетки прямоугольных координат выполняют с интервалом не более 1 см.
В заявленном способе общими существенными признаками для него и для его прототипа являются:
- получают предварительные параметры гидрометеорологических характеристик и параметры факторов, ограничивающих возможность его свободного маневрирования;
- вводят полученные исходные данные в ЭВМ;
- производят вычисление координат;
- прокладывают маршрут движения.
Сопоставимый анализ существенных признаков заявленного способа и прототипа показывает, что первый в отличии от прототипа имеет следующие отличительные признаки:
- на морскую навигационную карту наносят обстановку факторов, ограничивающих свободное маневрирование АНПА, преимущественно стационарной системой освещения подводной обстановки (ССОПО),
- затем на внутреннею рамку морской навигационной карты с нанесенной обстановкой факторов ССОПО наносят сетку прямоугольных координат, с помощью которой осуществляют переход от географических координат морской навигационной карты к прямоугольным координатам сетки, при этом нулевые координаты сетки совмещают с верхними левыми координатами морской навигационной карты,
- визуально на карте определяют и выделяют квадраты с абсолютным и временным запретом на прохождение в них АНПА, квадраты, запретные для всплытия АНПА в надводное положение на сеанс связи и определения места,
- вычисляют координаты этих квадратов,
- вводят данные в ЭВМ и выполняют расчет вероятности безопасного прохождения АНПА в каждой точке сетки прямоугольных координат, относительно ССОПО,
- затем вычисляют точки с наименьшей вероятностью взаимодействия с ССОПО и с учетом выявленных квадратов с абсолютным и временным запретом на прохождение в них АНПА, координаты квадратов, запретных для всплытия АНПА в надводное положение на сеанс связи и определения места,
- после чего осуществляют обратный переход от прямоугольных координат сетки к географическим координатам морской навигационной карты и получают географические координаты выявленных точек, по которым выполняют предварительную прокладку маршрута АНПА.
Данная совокупность общих и отличительных существенных признаков обеспечивает получение технического результата. Именно такая совокупность существенных признаков заявленного способа построения предварительной прокладки маршрута автономного необитаемого подводного аппарата позволила существенно повысить возможность безопасного прохождения маршрута АНПА.
Технический результат изобретения заключается в том, что создан новый способ построения предварительной прокладки маршрута АНПА, обеспечивающий надежный переход по маршруту с учетом факторов, ограничивающих возможность свободного маневрирования, а его использование в глубоководных подводных технических средствах, преимущественно в АНПА дальнего радиуса действия, полностью исключает возможность взаимодействия с этими факторами.
На основе изложенного можно заключить, что совокупность существенных отличительных признаков заявленного способа имеет причинно-следственную связь с достигнутым техническим результатом. Следовательно, заявленный способ является новым, обладает изобретательским уровнем и пригодным для использования в глубоководных робототехнических системах дальнего радиуса действия.
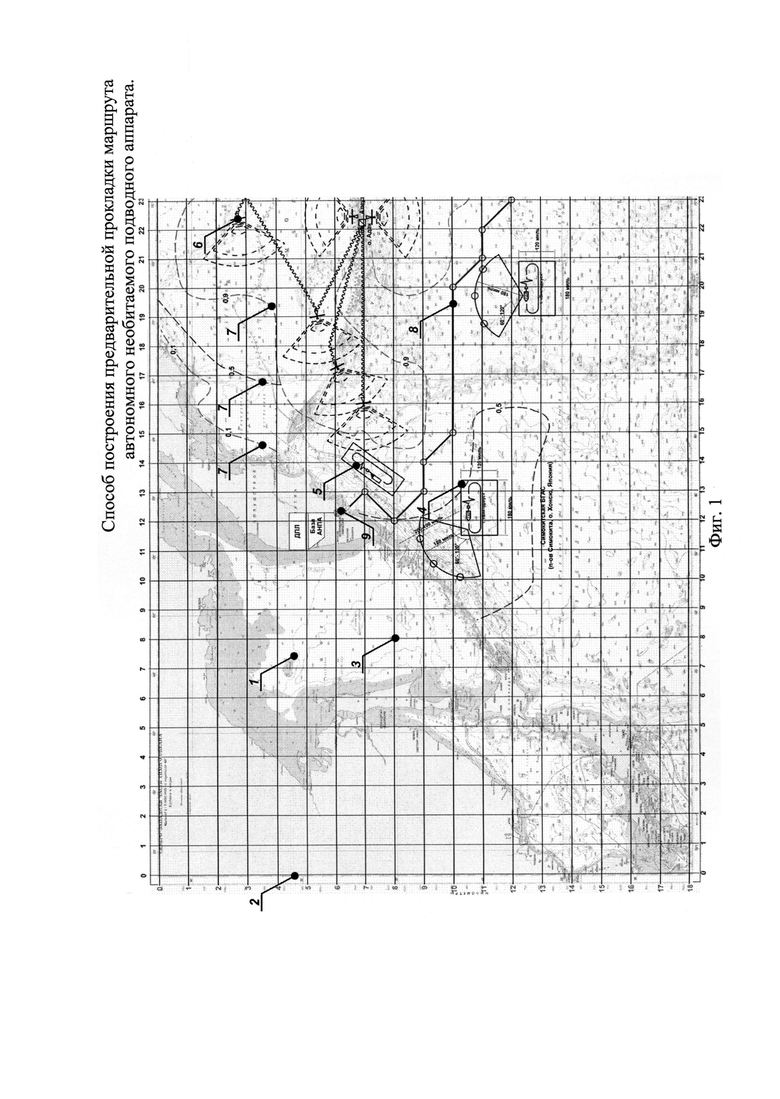
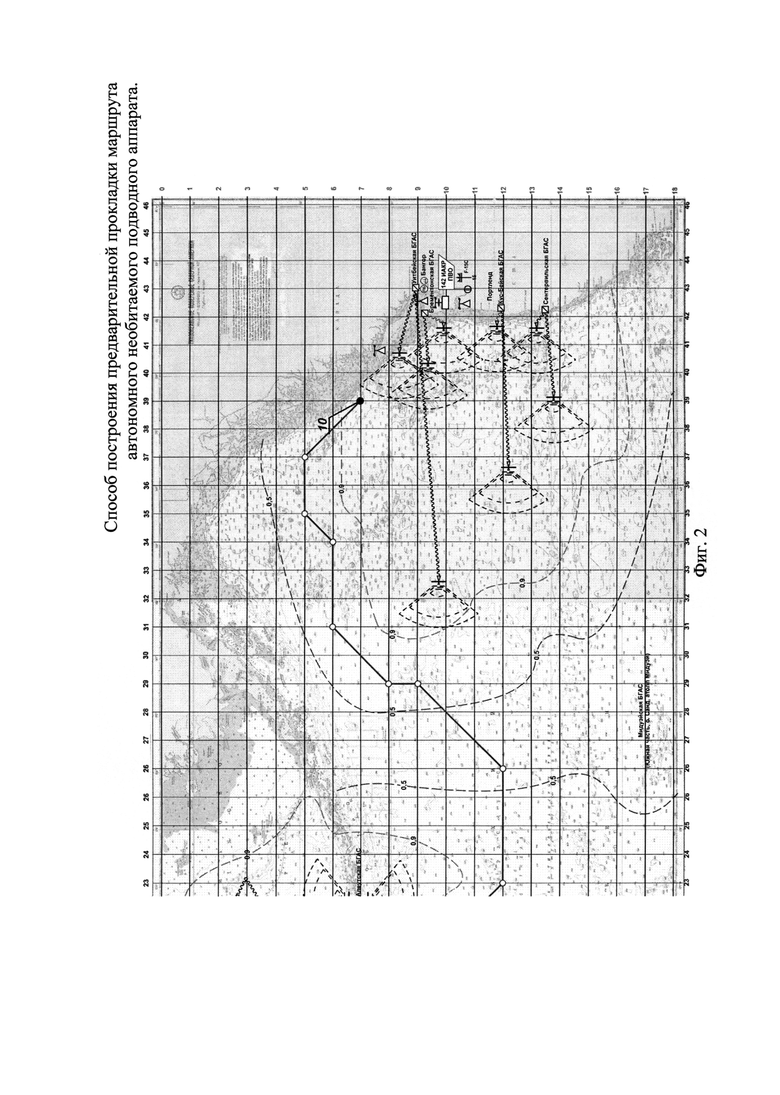
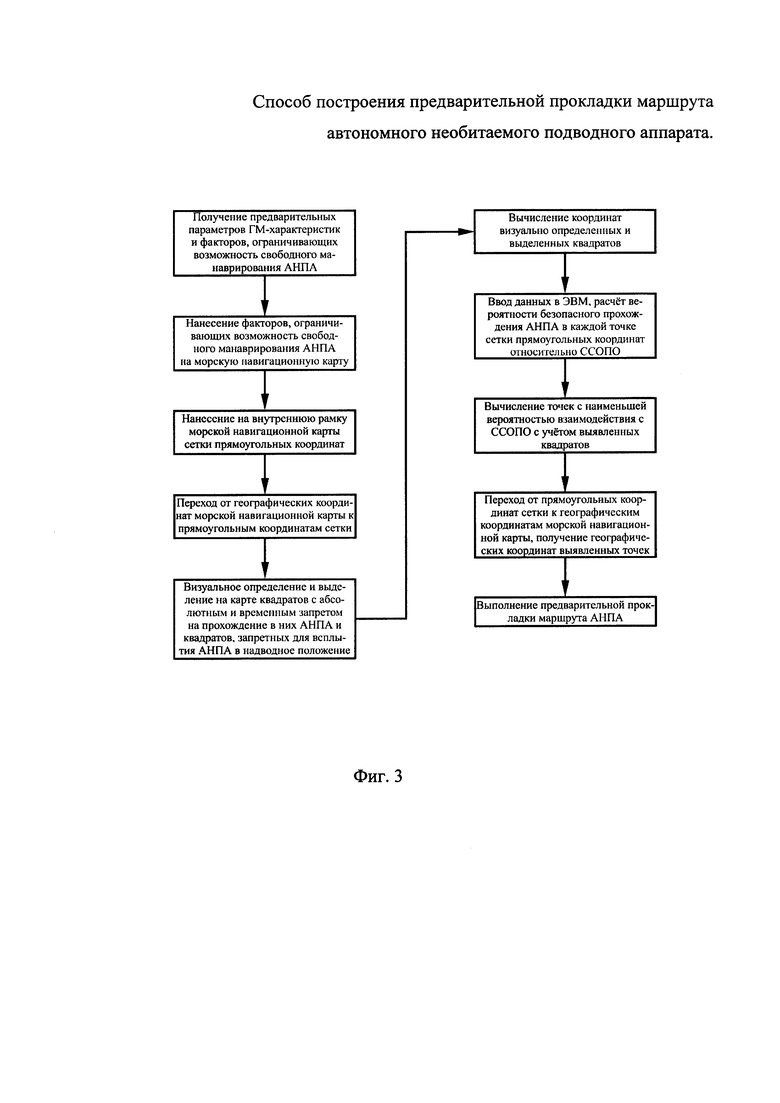
Изобретение поясняется чертежами: где на фиг. 1 и 2 представлена морская навигационная карта с обстановкой факторов, ограничивающих свободное маневрирование АНПА, сеткой прямоугольных координат и вариантом прокладки маршрута АНПА, разделенная на две фигуры, на фиг. 3 представлена блок-схема действий при построении предварительной прокладки маршрута АНПА.
На чертежах приняты следующие обозначения:
1 - морская навигационная карта;
2 - внутренняя рамка морской навигационной карты;
3 - сетка прямоугольных координат;
4 - район действия судна гидроакустической разведки;
5 - район действия подводной лодки;
6 - гидрофон ССОПО;
7 - граница зоны действия ССОПО со своей вероятностью;
8 - маршрут АНПА;
9 - начальный пункт маршрута АНПА;
10 - конечный пункт маршрута АНПА.
Способ построения предварительной прокладки маршрута автономного необитаемого подводного аппарата осуществляется следующим образом.
Перед выходом АНПА в море на морскую навигационную карту 1 наносят полученные параметры факторов 4, 5, ограничивающих свободное маневрирование АНПА, преимущественно стационарной системой освещения подводной обстановки (ССОПО) 6 и граница ее зоны действия 7. Затем на внутреннюю рамку 2 морской навигационной карты 1 с нанесенной обстановкой факторов 4, 5, 6, 7 наносят сетку прямоугольных координат 3, вертикальные и горизонтальные линии которой выполняют с интервалом не более 1 см и с помощью которой осуществляют переход от географических координат морской навигационной карты 1 к прямоугольным координатам сетки 3, при этом нулевые координаты сетки совмещают с верхними левыми координатами морской навигационной карты 1. Визуально на морской навигационной карте 1 определяют и выделяют квадраты с абсолютным и временным запретом на прохождение в них АНПА, квадраты, запретные для всплытия АНПА в надводное положение на сеанс связи и определения места. Вычисляют их координаты, вводят данные в ЭВМ и выполняют расчет вероятности безопасного прохождения АНПА в каждой точке сетки 3 прямоугольных координат, относительно факторов 6, 7. Затем выявляют точки с наименьшей вероятностью взаимодействия с ССОПО и с учетом выявленных квадратов с абсолютным и временным запретом на прохождение в них АНПА, квадратов, запретных для всплытия АНПА в надводное положение на сеанс связи и определения места. Осуществляют переход от прямоугольных координат сетки 3 к географическим координатам морской навигационной карты 1 и получают географические координаты выявленных точек, по которым выполняют предварительную прокладку маршрута 8 АНПА из начального пункта 9 в конечный пункт 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОХОДНЫЙ ГИДРОАКУСТИЧЕСКИЙ БУЙ-МАЯК И СПОСОБ НАВИГАЦИОННОГО ОБОРУДОВАНИЯ МОРСКОГО РАЙОНА | 2018 |
|
RU2710831C1 |
| Способ и система для навигационного обеспечения судовождения и определения координат | 2021 |
|
RU2773497C1 |
| СПОСОБ ЗАЩИТЫ ОХРАНЯЕМОЙ АКВАТОРИИ ОТ ПОДВОДНЫХ ДИВЕРСАНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2269449C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| СИСТЕМА ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2016 |
|
RU2648546C1 |
| Способ генерации предварительной прокладки пути судна и устройство для его реализации | 2021 |
|
RU2782617C1 |
| Система управления полётами, заходом на посадку и посадкой вертолетов для оборудования стартовых командных пунктов надводных кораблей и диспетчерских пунктов, размещаемых на судах и морских платформах | 2017 |
|
RU2667654C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАИВЫГОДНЕЙШЕГО ОПТИМАЛЬНОГО ПУТИ СУДНА | 2014 |
|
RU2570707C1 |
| СПОСОБ ОХРАНЫ ВОДНОГО РАЙОНА | 2016 |
|
RU2668494C2 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
Изобретение относится к способу построения предварительной прокладки маршрута автономного необитаемого подводного аппарата (АНПА). Для прокладки маршрута получают и вводят в ЭВМ предварительные параметры гидрометеорологических характеристик и параметры ограничивающих движение факторов, производят вычисление координат и прокладывают маршрут движения, наносят на морскую навигационную карту ограничивающие движение факторы стационарной системой освещения подводной обстановки, наносят сетку прямоугольных координат на внутреннюю рамку карты, совмещают нулевые координаты сетки с верхними левыми координатами карты, выделяют квадраты с абсолютным и временным запретами на прохождение в них АНПА, квадраты с запретом всплытия, вычисляют координаты этих квадратов и вводят их в ЭВМ, выполняют расчет вероятности безопасного прохождения в каждой точке сетки прямоугольных координат, осуществляют обратный переход к географическим координатам, осуществляют предварительную прокладку маршрута АНПА. Обеспечивается повышение возможности безопасного прохождения АНПА. 1 з.п. ф-лы, 3 ил. 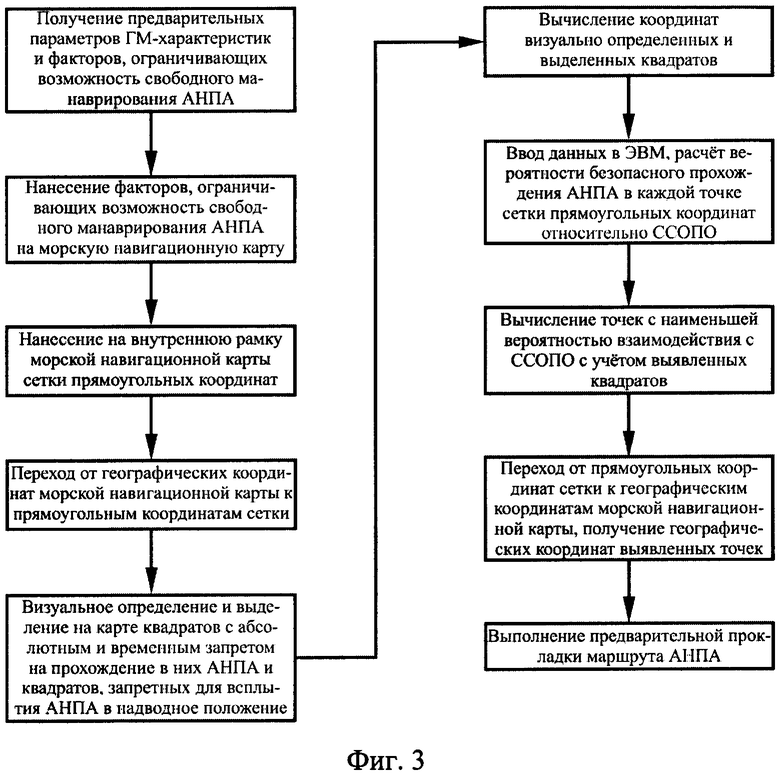
1. Способ построения предварительной прокладки маршрута автономного необитаемого подводного аппарата (АНПА), при котором получают предварительные параметры гидрометеорологических характеристик и параметры факторов, ограничивающих возможность его свободного маневрирования, вводят полученные исходные данные в ЭВМ, производят вычисление координат и прокладывают маршрут движения, отличающийся тем, что дополнительно на морскую навигационную карту наносят обстановку факторов, ограничивающих свободное маневрирование АНПА, преимущественно стационарной системой освещения подводной обстановки (ССОПО), затем на внутреннюю рамку морской навигационной карты с нанесенной обстановкой факторов ССОПО наносят сетку прямоугольных координат, с помощью которой осуществляют переход от географических координат морской навигационной карты к прямоугольным координатам сетки, при этом нулевые координаты сетки совмещают с верхними левыми координатами морской навигационной карты, визуально на карте определяют и выделяют квадраты с абсолютным и временным запретом на прохождение в них АНПА, квадраты, запретные для всплытия АНПА в надводное положение на сеанс связи и определения места, вычисляют координаты этих квадратов, вводят данные в ЭВМ и выполняют расчет вероятности безопасного прохождения АНПА в каждой точке сетки прямоугольных координат, относительно ССОПО, затем вычисляют точки с наименьшей вероятностью взаимодействия с ССОПО и с учетом выявленных квадратов с абсолютным и временным запретом на прохождение в них АНПА, координаты квадратов, запретных для всплытия АНПА в надводное положение на сеанс связи и определения места, после чего осуществляют обратный переход от прямоугольных координат сетки к географическим координатам морской навигационной карты и получают географические координаты выявленных точек, по которым выполняют предварительную прокладку маршрута АНПА.
2. Способ построения маршрута по п. 1, отличающийся тем что вертикальные и горизонтальные линии сетки прямоугольных координат выполняют с интервалом не более 1 см.
| WO 2017113367 A1, 06.07.2017 | |||
| СИСТЕМА ДЛЯ ПЛАНИРОВАНИЯ МУЛЬТИМОДАЛЬНОГО МАРШРУТА ПОЕЗДКИ | 2014 |
|
RU2572279C1 |
| US 20160320773 A1, 03.11.2016 | |||
| US 8543261 B2, 24.09.2013 | |||
| US 20120046819 A1, 23.02.2012. | |||

