Изобретение относится к области гидроакустики и может быть использовано в качестве гидроакустического вооружения подводных лодок (ПЛ), а также при исследовании Мирового океана.
Гидроакустические комплексы (ГАК) являются основой информационной системы ПЛ; с помощью ГАК решается комплексная задача наблюдения за подводной обстановкой, включающая обнаружение, определение координат и параметров движения цели (КПДЦ), классификацию различных целей. В настоящее время сформировалась типовая структура ГАК ПЛ, включающая системы шумопеленгования в среднечастотном диапазоне (ШП-СЧ) и в низкочастотном диапазоне (ШП-НЧ), системы гидролокации (ГЛ), обнаружения гидроакустических сигналов (ОГС), звукоподводной связи, классификации и др. Функционирование ГАК ПЛ обеспечивают центральная вычислительная система (ЦВС), система отображения, регистрации, документирования и управления, включающая пультовые приборы, системы технической диагностики и электропитания.
Основной системой современных ГАК ПЛ является система шумопеленгования, которая работает в пассивном режиме. В системе шумопеленгования имеются акустические антенны и аппаратура предварительной обработки (АПО). Информация, принятая антеннами и прошедшая предварительную обработку в АПО, в цифровом формате по общекомплексной шине поступает в ЦВС и, пройдя дальнейшую обработку, представляется операторам ГАК или передается во внешние системы.
Известна система шумопеленгования ГАК ГШ, описанная в патенте на полезную модель (РФ №122494, G01S 3/80 (2006.01), опубликован 27.11. 2012 г. бюлл. №33). Система шумопеленгования аналога состоит из подсистем шумопеленгования ШП-СЧ и ШП-НЧ. Система ШП-СЧ содержит первую приемную антенну (А1), расположенную в носовом обтекателе ПЛ, и первую аппаратуру предварительной обработки (АПО 1), последовательно соединенную с антенной А1. Подсистема ШП-НЧ содержит вторую приемную антенну (А2) выполненную как гибкая протяженная буксируемая антенна (ГПБА), соединенную через кабель-трос и токосъемник со второй аппаратурой предварительной обработки (АПО 2). Кроме того, в подсистему ШП-НЧ включены первая и вторая протяженные антенны, представляющие собой идентичные линейные антенны, размещенные по обоим бортам ПЛ и соединенные с первым и вторым входами дополнительной аппаратуры предварительной обработки (АПО 6), выход которой соединен со входом ЦВС.
Недостатком гидроакустического комплекса - аналога является низкая помехоустойчивость и малая дальность действия первой и второй протяженных антенн подсистемы ШП-НЧ в инфразвуковом диапазоне частот (1-100 Гц), который является наиболее информативным в проблеме обнаружения малошумных ГШ. Кроме того, сигналы, приходящие с носовых углов обзора не могут быть обнаружены подсистемой ШП-НЧ гидроакустического комплекса-аналога.
Известна также система шумопеленгования гидроакустического комплекса подводной лодки, описанная в патенте (РФ №2660377, G01S 3/80 (2006.01), опубликован 12.03. 2018 г., бюлл. №08). Система шумопеленгования содержит подсистему шумопеленгования в среднечастотном диапазоне ШП-СЧ, включающую первую приемную антенну А1 и первую аппаратуру предварительной обработки АПО 1, последовательно соединенную с первой приемной антенной А1, подсистему низкочастотного шумопеленгования ШП-НЧ, включающую вторую приемную антенну А2, которая выполнена в виде гибкой протяженной буксируемой антенны ГПБА, соединенной через кабель-трос и токосъемник со второй аппаратурой предварительной обработки АПО 2, третью приемную антенну (A3), выполненную в виде звукопрозрачной цифровой фазированной антенной решетки, расположенной на первой приемной антенне А1, и состоящей из многоканальных блоков гидроакустических приемников с последовательно соединенными модулями (АПО 3), которые через общую шину соединены с ЦВС, причем модули АПО и многоканальные блоки гидроакустических приемников герметизированы в едином конструктиве.
Данная система шумопеленгования гидроакустического комплекса ПЛ является наиболее близким аналогом к предлагаемому изобретению и принята за прототип. Система шумопеленгования устройства-прототипа имеет существенные недостатки при работе в инфразвуковом диапазоне частот (f=1÷100 Гц), а именно:
- третья приемная антенна A3, выполненная как фазированная антенная решетка из приемников звукового давления, обладает низкой направленностью, малой помехоустойчивостью и малой дальностью действия в инфразвуковом диапазоне частот в секторе углов ±(0÷90)°,
- как следствие этого недостатка подсистема шумопеленгования ШП-НЧ не различает, с какого борта, правого или левого, находится обнаруженный источник шума,
- как следствие этого недостатка подсистема шумопеленгования ШП-НЧ может работать только при выпущенной ГПБА.
Задача настоящего изобретения заключается в устранении указанных недостатков, а именно:
- в увеличении помехоустойчивости и дальности действия подсистемы ШП-НЧ в инфразвуковом диапазоне частот,
- в увеличении направленности приемной антенны A3 в инфразвуковом диапазоне частот,
- в обеспечении однозначности пеленгования с помощью ГПБА,
- в обеспечении работы подсистемы ШП-НЧ без выпуска ГПБА.
Для решения поставленных задач в системе шумопеленгования ГАК ПЛ, содержащей подсистему шумопеленгования в среднечастотном диапазоне ШП-СЧ, включающую первую приемную антенну А1, расположенную в носовом обтекателе ПЛ, и первую аппаратуру предварительной обработки АПО 1, последовательно соединенную с первой приемной антенной А1, подсистему низкочастотного шумопеленгования ШП-НЧ, включающую вторую приемную антенну А2, которая выполнена в виде гибкой протяженной буксируемой антенны ГПБА, соединенной через кабель-трос и токосъемник со второй аппаратурой предварительной обработки АПО 2, расположенную в носовом отсеке ПЛ третью приемную антенну A3 и последовательно соединенную с ней аппаратуру предварительной обработки АПО-3, третья приемная антенна A3, выполнена в виде расположенного в носовом обтекателе ПЛ приемного модуля (ПМ-1), оснащенного гидроакустическим комбинированным приемником (КП-1) в обтекателе, компасом и датчиками углового положения, причем третья аппаратура предварительной обработки АПО-3 герметизирована в едином конструктиве с КП-1, в состав ГПБА введен расположенный на ее конце второй приемный модуль (ПМ-2), оснащенный гидроакустическим приемником (КП-2) в обтекателе, компасом и датчиками углового положения, последовательно соединенный с четвертой аппаратурой предварительной обработки (АПО-4), герметизированной в едином конструктиве с КП-2, в состав центральной вычислительной системы ЦВС введены подсистема обработки скалярно-векторной информации (ПО СВИ-1), вход которой соединен с выходом блока АПО-3, подсистема обработки скалярно - векторной информации (ПО СВИ-2), вход которой соединен с выходом блока АПО-4, а информация, принятая приемными модулями ПМ-1 и ПМ-2 и прошедшая предварительную обработку в АПО-3 и АПО-4, поступает в цифровом формате по общекомплексной шине в ЦВС и, пройдя дальнейшую обработку в подсистемах обработки ПО СВИ-1, ПО СВИ-2, передается операторам ГАК или передается во внешние системы.
Приемный модуль ПМ-1, расположенный в носовом обтекателе ПЛ, крепится одним концом якорь - троса к нижнему шпангоуту носового обтекателя ПЛ, а другим концом - к плавучести, фиксирующей вертикальное положение приемного модуля в носовом обтекателе ПЛ. Способ крепления комбинированного приемника внутри обтекателя приемного модуля подробно описан в патенте на полезную модель (РФ №106880, В63С 11/48 (2006.01), G01S 15/02 (2006.01), B63G 8/00 (2006.01)), опубликован 27.07.2011, бюлл. №21).
Ось X локальной системы координат (x.y.z) комбинированного приемника КП-1 совмещается с диаметральной плоскостью ПЛ. Комбинированный приемник, оставаясь точечным приемником, обладает повышенной помехоустойчивостью в инфразвуковом диапазоне частот, которая оценивается не менее, чем в 20дБ, что позволяет решать с его помощью проблему обнаружения малошумных источников и определения пеленга на источник в диапазоне носовых курсовых углов Одиночный КП, обладающий помехоустойчивостью в 20 дБ, эквивалентен по дальности обнаружения малошумных источников линейной антенне, содержащей 100 приемников звукового давления. Однако такая антенна не может быть реализована на борту ПЛ, т.к. ее апертура в инфразвуковом диапазоне частот намного превышает габариты самой ПЛ. Алгоритмы обработки скалярно - векторной информации, обеспечивающие повышенную помехоустойчивость КП, и алгоритмы пеленгования, обеспечивающие повышенную точность при работе в мелком море в инфразвуковом диапазоне частот, описаны в патенте (РФ №2687886, В63С 11/48 (2006.01), G01S 3/80 (2006. 01), B63G 8/00 (2006. 01), опубликован 16.05.2019. Бюл. №14). Таким образом, приемный модуль ПМ-1 обеспечивает эффективную работу подсистемы ШП-НЧ в диапазоне носовых курсовых углов ±(0÷90)° без выпуска ГПБА.
Приемный модель ПМ-2, введенный в состав ГПБА, обеспечивает эффективное обнаружение малошумных источников и их пеленгование в диапазоне кормовых курсовых углов ±(90÷180)°. Он позволяет исключить неоднозначность пеленгования, свойственную ГПБА, и повысить дальность обнаружения малошумных целей при работе системы в инфразвуковом диапазоне частот.
Таким образом, именно такая совокупность существенных признаков заявленного изобретения позволяет создать подсистему шумопеленгования ШП-НЧ с повышенной дальностью действия в инфразвуковом диапазоне частот, повысить направленность подсистемы ШП-НЧ в диапазоне носовых курсовых углов и ее независимую работу без выпущенной ГПБА, устранить неоднозначность пеленгования с помощью ГПБА в секторе кормовых курсовых углов и повысить эффективность работы подсистемы ШП-НЧ в этом секторе курсовых углов путем совместной обработки скалярно - векторной информации, получаемой с помощью ГПБА и ПМ-2.
На основании изложенного можно заключить, что совокупность существенных признаков заявленного изобретения имеет причинно-следственную связь с достигнутым техническим результатом.
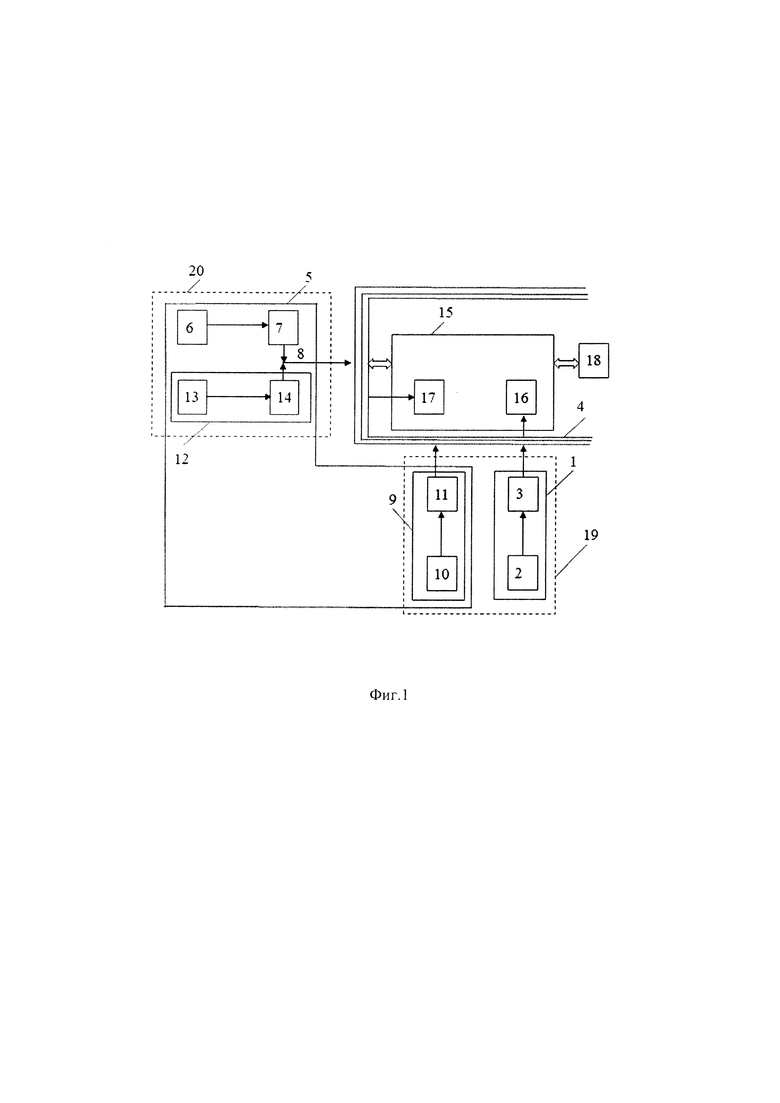
Сущность заявленного изобретения поясняется чертежами, где: на фиг. 1 представлена обобщенная блок-схема системы шумопеленгования ГАК-ПЛ, на фиг. 2 представлена блок - схема подсистемы обработки скалярно - векторной информации, идентичная для подсистем ПО СВИ-1 и ПО СВИ-2.
Система пеленгования ГАК ПЛ содержит в своем составе подсистему 1 (ШП-СЧ), состоящую из антенны 2 (А1) и последовательно соединенной с ней аппаратурой предварительной обработки 3 (АПО-1). Сигналы с выхода АПО-1 поступают в цифровом формате на общекомплексную шину 4. Подсистема низкочастотного пеленгования 5 (ШП-НЧ) содержит антенну 6, которая выполнена как гибкая протяженная буксируемая антенна ГПБА, и последовательно соединенную с ней аппаратуру предварительной обработки 7 (АПО-2), с выхода которой сигналы поступают через кабель - трос 8 и токосъемник на общекомплексную шину 4. Кроме того, в подсистему ШП-НЧ включен расположенный в носовом отсеке ПЛ приемный модуль 9 (ПМ-1), содержащий комбинированный приемник 10 (КП-1) с обтекателем, компасом и датчиками углового положения, последовательно соединенный с аппаратурой предварительной обработки 11 (АПО-3), выход которой соединен с общекомплексной шиной 4, и приемный модуль 12 (ПМ-2), содержащий комбинированный приемник 13 (КП-2) с обтекателем, компасом и датчиками углового положения, последовательно соединенный с аппаратурой предварительной обработки 14 (АПО-3), выход которой соединен кабель - тросом 8 через токосъемник с общекомплексной шиной 4. Сигналы с общекомплексной шины 4 в цифровом формате поступают в центральную вычислительную систему 15 (ЦВС), в которую включены подсистема обработки 16 скалярно - векторной информации (ПО СВИ-1), вход которой соединен с выходом блока 11 (АПО-3), подсистема обработки 17 скалярно - векторной информации (ПО СВИ-2), вход которой соединен с выходом блока 14 (АПО-4), а информация, принятая приемными модулями ПМ-1 и ПМ-2 и прошедшая предварительную обработку в АПО-3 и АПО-4, поступает в цифровом формате по общекомплексной шине в ЦВС и, пройдя дальнейшую обработку в подсистемах обработки ПО СВИ-1, ПО СВИ-2, передается операторам ГАК 18 или передается во внешние системы. Конструктивно подсистема ШП-СЧ и приемный модуль ПМ-1 расположены в носовом обтекателе 19 ПЛ, а ГПБА и ПМ-2 в буксируемом устройстве 20.
Система шумопеленгования гидроакустического комплекса ПЛ работает следующим образом. По умолчанию основным режимом работы ГАК ПЛ является режим приема, поэтому подсистема ШП-СЧ и приемный модуль ПМ-1 подсистемы ПШ-НЧ, размещенные в носовом обтекателе ПЛ, являются оперативно включенными. Эти подсистемы осуществляют обзор пространства в секторе носовых курсовых углов ±(0÷90)°. Подсистема ШП-СЧ работает в штатном режиме, который подробно описан в монографиях (Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника. СПб. Наука, 2004., - Смарышев М.Д., Добровольский Ю.Ю. Гидроакустические антенны. Л. Судостроение. 1984).
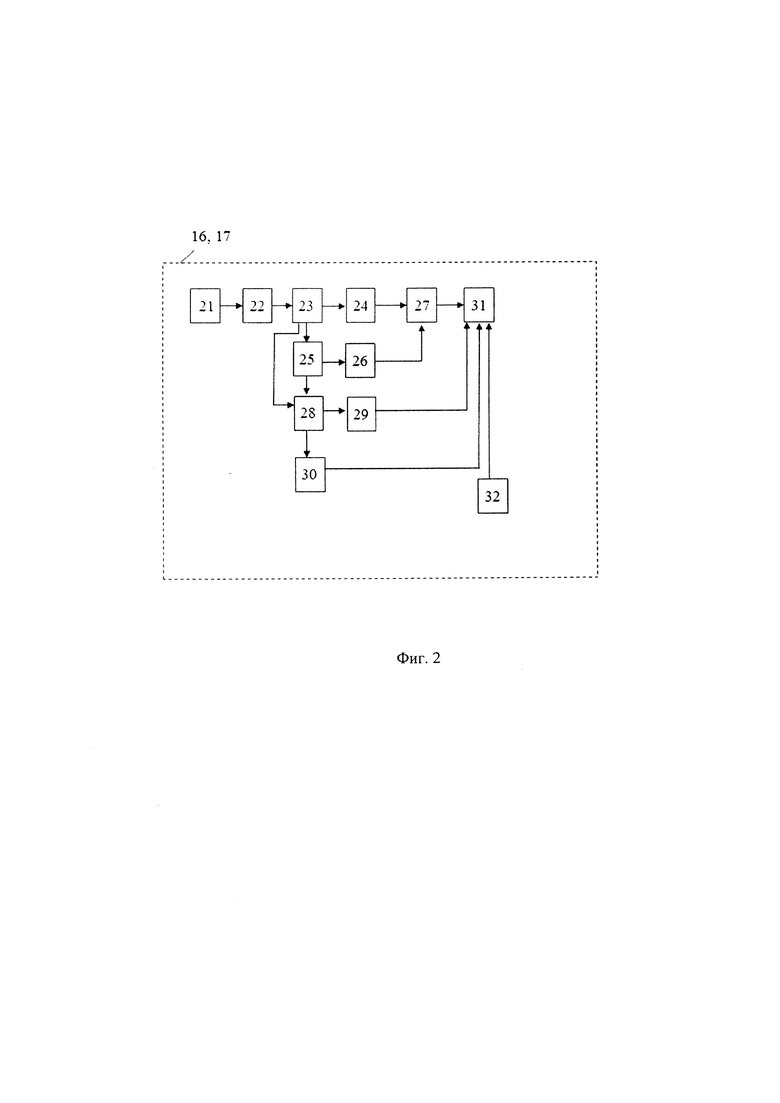
Обработка скалярно - векторной информации в подсистемах 16, 17, которая поясняется фиг. 2, происходит следующим образом.
В процессе работы в режиме шумопеленгования комбинированные приемники 10,13 измеряют звуковое давление в канале звукового давления и компоненты вектора градиента давления в векторных каналах и передают информацию в аппаратуру предварительной обработки И, 14, входы которых соединены с выходами комбинированных приемников. Предварительная обработка сводится к оцифровке и фильтрации данных, после чего сигналы передаются в общекомплексную шину 4 по электрическим или оптоволоконным каналам связи, с выхода которой сигналы поступают в системы обработки 16, 17 центральной вычислительной системы 15. Алгоритмы первичной обработки, идентичные в системах 16, 17, сводятся к вычислению в блоке 21 комплексных амплитуд спектральных составляющих принятых сигналов в каналах комбинированного приемника методом быстрого преобразования Фурье. После первичной обработки данных сигналы поступают на вход блока 22 выделения помехи (N) из суммарного случайного процесса сигнал плюс помеха (S+N) во всех каналах комбинированного приемника, вход которого соединен с выходом блока 21 первичной обработки данных.
При работе комбинированного приемника в качестве обнаружителя слабых сигналов, как правило, достаточно подробная информация о шумовом поле помехи в реальном масштабе времени отсутствует. В простейшем случае можно предположить, что спектр шумовой помехи является сплошным, а спектр сигнала содержит дискретные составляющие, для выделения которых следует использовать методы спектрального анализа высокого разрешения. С учетом этого, можно предложить различные алгоритмы аппроксимации комплексной амплитуды соответствующей спектральной составляющей шумовой помехи, основанные только на предположении о «гладкости» сплошного спектра помехи. В качестве достаточно общего алгоритма выделения помехи (N) из суммарного процесса (S+N) можно использовать следующий алгоритм
2Δƒ0 - ширина окна Хэмминга.
где ƒ0 - средняя частота частотного канала, Δƒ0 - варьируемый параметр, примерно на порядок превышающий ширину дискретной составляющей Δƒ в спектре суммарного процесса (сигнал плюс шум), AN(f0, t), AS+N(f0, t), параметры звукового поля (звуковое давление, компоненты вектора градиента давления) для помехи (N) и для суммарного процесса (S+N), М число усредняемых спектральных отсчетов.
С выхода блока 22 выделения помехи (N) из суммарного случайного процесса (S+N) сигнал поступает в блок 23 вычисления полного набора информативных параметров Ai (i=1-16) для суммарного случайного процесса (S+N) и помехи (N) по формулам
A1=|p|2, A2=ReIx, A3=ReIy, A4=ReIz, A5=ImIx, А6=ImIу, A7=ImIz, A8=|Rx|, A9=|Ry|, A10=|Rz|, A11=g1x2, A12=gly2, Al3=glz2, A14=g2x2, A15=g2y2. A16=g2z2.
где р=р1=iр2 - комплексная амплитуда звукового давления,  - комплексная амплитуда вектора градиента давления,
- комплексная амплитуда вектора градиента давления,  - комплексная амплитуда вектора интенсивности, Rx, Ry, Rz-компоненты ротора вектора интенсивности,
- комплексная амплитуда вектора интенсивности, Rx, Ry, Rz-компоненты ротора вектора интенсивности,
С первого выхода блока 23 сигналы поступает в блок 24 для усреднения горизонтальных компонент (х,у) вещественной составляющей вектора интенсивности для суммарного случайного процесса (S+N) в соответствии с формулами
где Т1 - заранее определенный интервал усреднения, удовлетворяющий условию vT1>>λ, v - предполагаемая скорость движения подводного источника звука, λ - длина волны. Усредненные компоненты вещественной составляющей вектора интенсивности определяют компоненты потенциальной составляющей вектора интенсивности:
Выделенные потенциальные составляющие вектора интенсивности поступают на первый вход блока 27 для вычисления азимутального угла на источник звука по формуле (2) по потенциальной составляющей вектора интенсивности.
Кроме того, сигналы со второго выхода блока 23 поступают на вход блока 25 вычисления азимутального угла для горизонтальной компоненты ротора вектора интенсивности по формуле

Вычисленные в блоке 25 значения азимутального угла для горизонтальной компоненты ротора вектора интенсивности усредняются в блоке 26 по формуле

где Т2 - заранее определенный интервал усреднения, удовлетворяющий условию vT2>>λ, и поступают на второй вход блока 27 для вычисления истинного азимутального угла на источник звука по формуле

где IП, IВ - потенциальная и вихревая составляющие вектора интенсивности,
Кроме того, сигналы с третьего выхода блока 23 поступают на вход блока 28 вычисления отношения сигнал-помеха (S/N) для полного набора информативных параметров по формулам

где знак 〈〉 означает операцию усреднения по формулам (4), (i=1-16).
С выхода блока 28 вычисленные отношения (S/N) для трех вещественных составляющих ротора вектора интенсивности поступают на вход первого компаратора 29, который определяет информативный параметр, которому соответствует максимальное отношение (S/N). Аналогично, со второго выхода блока 28 вычисленные отношения (S/N) для полного набора информативных параметров поступают на вход второго компаратора 30, который выбирает из полного набора информативный параметр, которому соответствует максимальное отношение (S/N). Вся полученная информация поступает в блок 31, первый вход которого соединен с выходом блока 27 вычисления истинного азимутального угла на источник звука, второй вход соединен с выходом первого компаратора 29, третий вход соединен с выходом второго компаратора 30, четвертый вход соединен с выходом датчика 32 глубины, причем за горизонт источника звука принимаются показания датчика глубины, соответствующие максимуму отношения сигнал помеха (S/N) на выходе первого компаратора, а в качестве признака обнаружения движущегося подводного источника звука принимается степень превышения максимума отношения сигнал-помеха (S/N) на выходе второго компаратора, принимаемая в качестве предварительно определенного порога обнаружения, над уровнем этой величины в поле фоновой шумовой помехи. Полученная в подсистемах 16, 17 информация об обнаружении источника звука, пеленге на источник звука и горизонте источника звука передается операторам ГАК 18 или передается во внешние системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система шумопеленгования гидроакустического комплекса подводной лодки | 2016 |
|
RU2660377C2 |
| ГИДРОАКУСТИЧЕСКИЙ КОМПЛЕКС | 2013 |
|
RU2531042C1 |
| Система противоторпедной защиты гидроакустического комплекса подводной лодки | 2016 |
|
RU2661066C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ТОРПЕДЫ | 2014 |
|
RU2568935C1 |
| СПОСОБ ГИДРОАКУСТИЧЕСКОГО ОБЕСПЕЧЕНИЯ ПРОТИВОТОРПЕДНОЙ ЗАЩИТЫ СУДОВ | 2015 |
|
RU2584355C1 |
| МНОГОДИАПАЗОННАЯ ГИБКАЯ ПРОТЯЖЕННАЯ БУКСИРУЕМАЯ АНТЕННА | 1987 |
|
SU1840453A1 |
| Шумопеленгаторная станция для подводной лодки | 2022 |
|
RU2791851C1 |
| Гидроакустическая станция контроля подводной обстановки | 2019 |
|
RU2724145C1 |
| Гидроакустический комплекс для обнаружения движущегося подводного источника звука, измерения азимутального угла на источник звука и горизонта источника звука в мелком море | 2018 |
|
RU2687886C1 |
| СТАНЦИЯ КОНТРОЛЯ УРОВНЕЙ ШУМОВ МОРСКИХ НЕФТЕГАЗОВЫХ КОМПЛЕКСОВ | 2011 |
|
RU2480789C2 |
Изобретение относится к области гидроакустики и может быть использовано в качестве гидроакустического вооружения подводных лодок (ПЛ), а также при исследовании Мирового океана. Гидроакустический комплекс подводной лодки (ГАК-ПЛ) содержит подсистему шумопеленгования в среднечастотном диапазоне (ШП-СЧ), последовательно соединенную с аппаратурой предварительной обработки (АПО-1), расположенную в носовом обтекателе ПЛ, и подсистему шумопеленгования в низкочастотном диапазоне (ШО-НЧ), выполненную как гибкая протяженная буксируемая антенна (ГПБА), последовательно соединенную с аппаратурой предварительной обработки (АПО-2), а информация от подсистем ШП-СЧ и ШП-НЧ после предварительной обработки поступает по общекомплексной шине в центральную вычислительную систему и далее передается операторам или во внешние системы. Для увеличения помехоустойчивости и дальности действия системы шумопеленгования, для увеличения ее направленности в низкочастотном диапазоне, а также для устранения неоднозначности пеленгования, свойственной ГПБА, в состав ШП-НЧ введен расположенный в носовом обтекателе ПЛ первый приемный модуль (ПМ-1), оснащенный комбинированным приемником (КП-1) в обтекателе, компасом и датчиками углового положения, последовательно соединенный с аппаратурой предварительной обработки, расположенный на конце ГПБА второй приемный модуль (ПМ-2), оснащенный комбинированным приемником (КП-2) в обтекателе, компасом и датчиками углового положения, а информация, получаемая первым и вторым приемными модулями, после предварительной обработки поступает по общекомплексной шине в первую и вторую подсистемы обработки скалярно-векторной информации, расположенные в центральной вычислительной системе, и далее передается операторам ГАК или во внешние системы. 2 ил.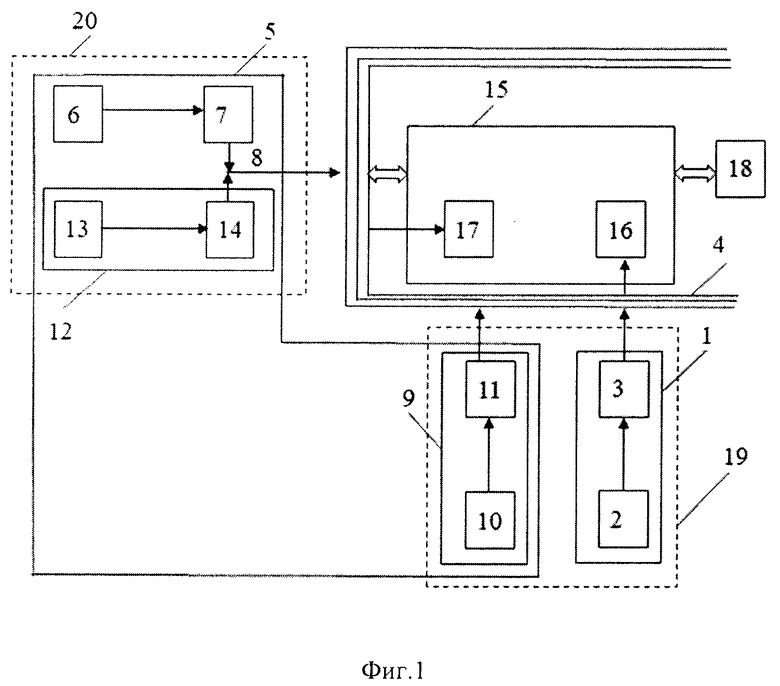
Система шумопеленгования гидроакустического комплекса подводной лодки (ГАК ПЛ), содержащая подсистему шумопеленгования в среднечастотном диапазоне (ШП-СЧ), включающую первую приемную антенну (А1), расположенную в носовом обтекателе ПЛ, и первую аппаратуру предварительной обработки (АПО 1), последовательно соединенную с первой приемной антенной А1, подсистему низкочастотного шумопеленгования (ШП-НЧ), включающую вторую приемную антенну (А2), выполненную в виде гибкой протяженной буксируемой антенны (ГПБА), соединенной через кабель-трос и токосъемник со второй аппаратурой предварительной обработки (АПО 2), расположенную в носовом отсеке ПЛ третью приемную антенну (A3) и последовательно соединенную с ней аппаратуру предварительной обработки (АПО-3), отличающаяся тем, что третья приемная антенна A3 выполнена в виде расположенного в носовом обтекателе ПЛ приемного модуля (ПМ-1), оснащенного гидроакустическим комбинированным приемником (КП-1) в обтекателе, компасом и датчиками углового положения, причем третья аппаратура предварительной обработки АПО-3 герметизирована в едином конструктиве с КП-1, в состав ГПБА введен расположенный на ее конце второй приемный модуль (ПМ-2), оснащенный гидроакустическим приемником (КП-2) в обтекателе, компасом и датчиками углового положения, последовательно соединенный с четвертой аппаратурой предварительной обработки (АПО-4), герметизированной в едином конструктиве с КП-2, в состав центральной вычислительной системы (ЦВС) введены подсистема обработки скалярно-векторной информации (ПО СВИ-1), вход которой соединен с выходом блока АПО-3, подсистема обработки скалярно-векторной информации (ПО СВИ-2), вход которой соединен с выходом блока АПО-4, а информация, принятая приемными модулями ПМ-1 и ПМ-2 и прошедшая предварительную обработку в АПО-3 и АПО-4, поступает в цифровом формате по общекомплексной шине в центральную вычислительную систему и, пройдя дальнейшую обработку в подсистемах обработки ПО СВИ-1, ПО СВИ-2, передается операторам ГАК или передается во внешние системы.
| СПОСОБ ПОЛУЧЕНИЯ АМБРИАЛЯНК^:?:С;(ЛЯ..,- -vr-'-i' ^ | 0 |
|
SU167932A1 |
| Грузозахватное приспособление | 1956 |
|
SU106880A1 |
| Способ обнаружения шумящих объектов в мелком и глубоком море | 2019 |
|
RU2702917C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| Способ определения поля давления в межлопастных каналах рабочих колес гидромашин и устройство для осуществления этого способа | 1954 |
|
SU104330A1 |
| WO 1996003662 A2, 08.02.1996. | |||

