Су1дестяу1ия(ия cjiocoo определения ииля давления и межлопастных каналах гидромапшн при помощи зшкритруоок применим ТОЛЬКО при невр;ица1011(емся рабочем колесе. Такой способ не обеспечивает возможности определения характера распределения давления в межлопастных каналах вращающегося рабочего колеса.
Способ, согласно изобретению, свободен от этого педосгатка. Сущность .его : акЛ1очается в том, что лоспринимающип давление гидравлической среды датчик nepi;.мещают через меи -топастноп канал вращаюи егося колеса турбин1 параллельно его оси вращения со скоростью, являюЛ(ейся функцией угла наклона касательно профиля лоаасти, взятого в ее цилиндричоскозг сечепии. Для осуществления такого перемещения применена рыча;кная систе.иа, получаклцая дв1гжение от П1)оФильного кулачка, враьишпдегося синхронно с валом гидромашипы.
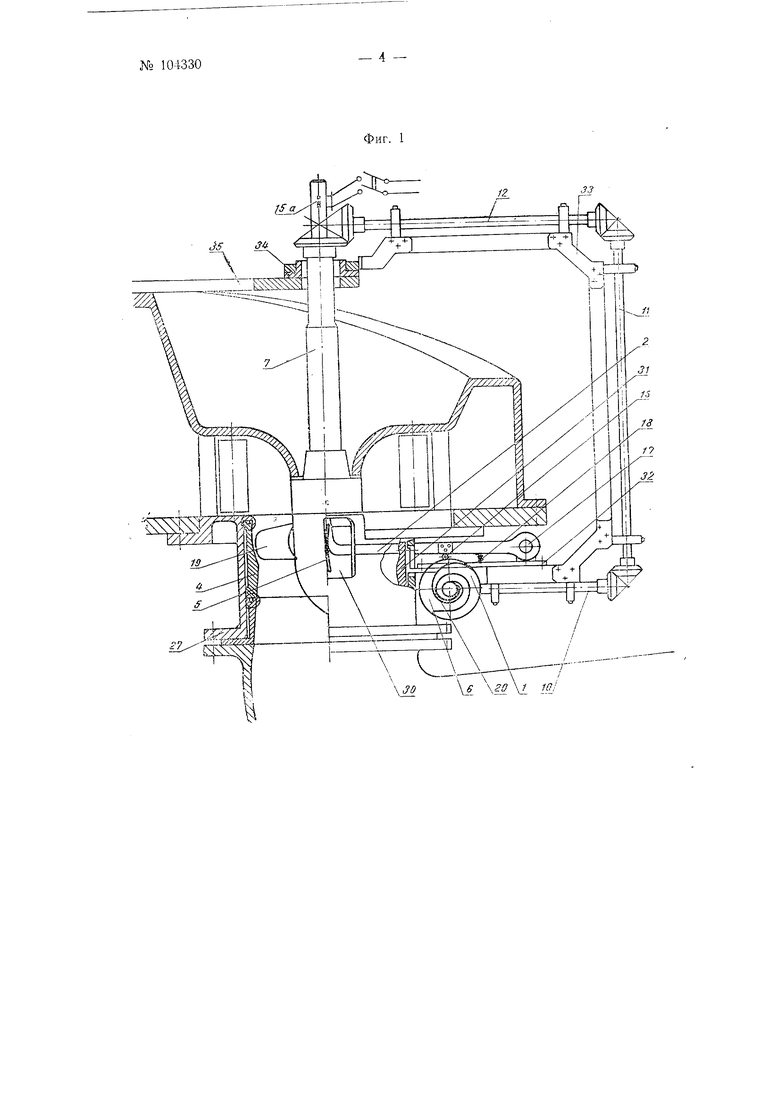
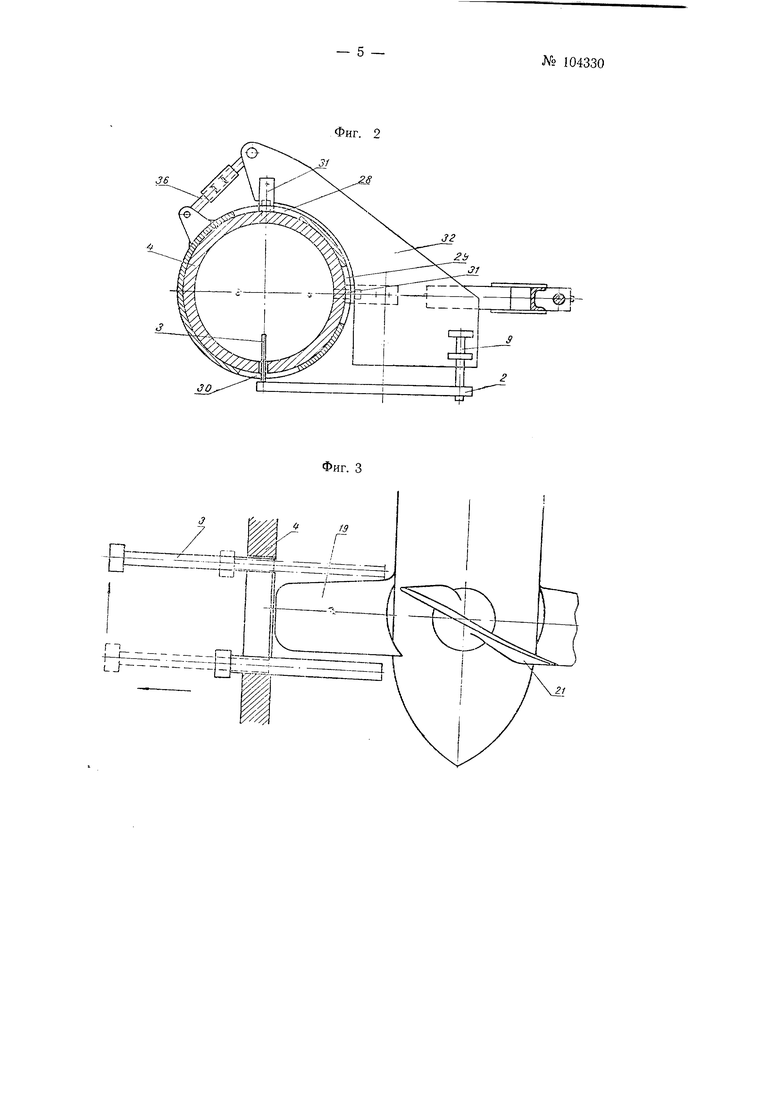
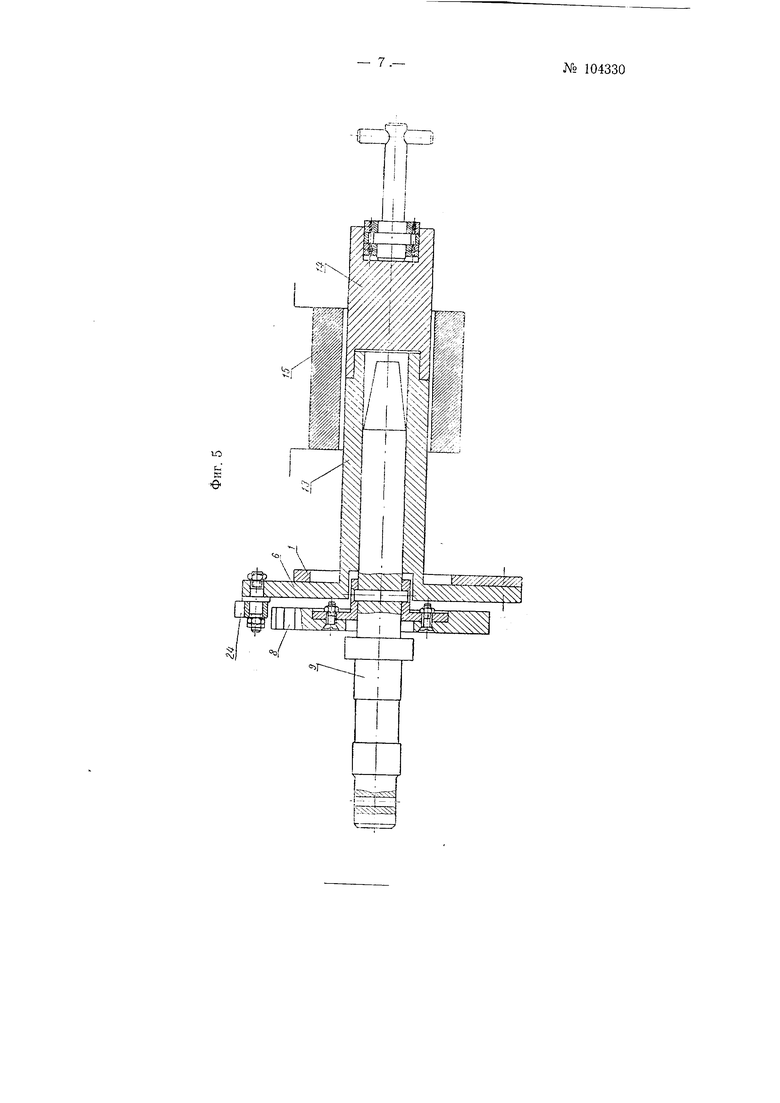
На фиг. I п. обрая;ен общи1г вид предлагаемого у;:тронства, установленного иа осевой гидротурбине; на фиг. 2 - ннд па камеру рабочего колеса сверху; на фиг. 3 - схема движения стержня, несущего датчик давления; на ifnir. 4 изображен нрофилпнып кулачок спереди; на фиг. 5 - впд на него сбоку.
Устройство ДЛЯ ocyiijecTJUcHfw cjrocoба включает в себя профильный кулачок (1), рычаг (2) и ;i;ecTKO укрепленный на нем стержень (3). несуягнй индуктивный
датчик давления, нводнмын вместе со стержнем у камеру (4) рабочего колеса гидромашины черс;; нрорезь (о).
Кулачок (I) л;сстк(; соединен с цилиндрически.м диском (6), к-инематпчески (-.вязанным с валом (7) рабочего колеса гидромаиптны через храповое колесо (8), 1 едущий валик (9) п промежуточные валики (10), (11) н (J2) и конические дшстерни.
Диск (6) изготовлен каи одно целое со втулкой (13), надетой на валик (9) и жестко соединенной с сердечником (14) соленоида (15), включаемого через выкль чатель и контактную пластину (15а). расположенную на вале (7).
При срабатывании соленоида (15) втулка (13) перемеи ается вдоль валика (9), is результате чего кулачок (1) нодходитпод опорный РОЛИК (16) рычага (2) п поддерживает его нек-оторое время своей цилиндрической частью, диаметр которой равен внешнему диаметру дпска (6). С нодходом
под опорный ролик (16) профильной ЧАСТИ
вращающегося кулачка (1) рычаг (2), поворачиваясь на осп (17) под действие.г пружины (18). переметцаег индуктивный датчик через межлопаетной канал воа.ща.ющегося рабочего колеса сверху вниз. В это время производят запись давления при 11 омощи ос цпл Л о гра фа.
Профиль кулачка (1) нодобрап так, чтобы перемещение датчика происходило, нрп его относительном движении по отноjucHiiKi к вращающейся лонасш (JJ), w KpiiBOji ,1истант1Ш11 iii)0(l)ii.:uo лг лаети, взятому в ее цилиндрическом сечшиш.
При сходе flnopH(Jo ролика (16) с iiyoi; iL4bHo:i части кулачка (1) на цилиндрическую иовпрхность итулки (13) иоморот рычага (2) и иере.мещснк датчика- ирек.ращаются. Для того тгопы ролик (16) мог свободно иройти вокруг втулки (ГЗ), близлежаии-а к делггру участок ирофилг.иого кулачка вьшоляеи откидиыл и 1рисоедингт к С-иовной eio ирофильииц части с liLi.MouUlio даифы (20).
Иосло шремсщеиии стержня (3) (МО выводят и; 1;а.мсры рабочего колеса, цорсмсщают вверх вдоль ироре; (о), од новремеюк) иоворачивая рычаг (2), и iiHoiib вводят в камеру рапоч;го колеса jibuiie 1 ходных кроМОк (21) лоиаетг, (фиг. 3). Прн этом опорный ролик (()) устанавливают ка ципиитричесши дис;;. (6).
Для онредйлония иоля данления но всему цилиндрическому сечению межлоиастиого каиала кулачок. (1) смеиуиот (irHiiситсльно хранового колеса (s) иа некоторый угол так, чтобы ироОшльная част) кулачка иодходила иод )олик (16) рглчага Ci) с ;-;aiui;ubUiaiutCM. CMcni, кулачка (1) производят без остановки шдротурбины с иолощыо рычат (22). При набегании на рычаг (22) выстуна (23) собачка {2;1) новорачивается и вв1лодит и:; зацеилення с храноклм колесом (8). Сце.вление собачки (21) с храновым келесом происходит иод действием Н1)у:/кинь.
За время расц(Ч)лснного состояния хра1 овое колесо поворачивается отнесител)но кулачка (1) на один зуб. Отвод рычага (22) в исход1 ое иолол;е {ие нре изводктся выстуИОМ (25) со бачки.
Один из зубцов (2G) храпового колеса выполнен более высоким, чем осталвные зубцы. Установка собачки (24) на этот зубец нроизводится без остановки гидротурбины, нутем гногократ)гого новорота рычага (22) до наложения (I). Положение собачки на зубце (26) соответствует такому иоло;1;ен1110 датчика, ири котором нере,шн1,енио его нроисходнт на более близком расстоянии от иоверхности лонасти. Для отвода собачки (24) от зубца (26) рычаг (22) новорачивают до иоложеиия (II).
Камера (4) рабочего колеса ввиюлнена в виде поворотного кольца, раснолоя;енного в кориусе (27), снаба;енном тремя окнами (28), (29) и (30), в двух из которых установленвт крониггейны (31), укрепленные на камере (4) и несущие нлиту (32) с монтированными на ней рычагом (2), ведущим валиком (9) и рамой (33), нотдерживаимцей нромежуточные ва.1ИКН (10), (11) и (12). Верхняя часть рамы (33) сочленена с цапфой (31) ненодiut;KHoro кронштейна (35).
Для онределения иоля давленин ири Г/азличиых ноложениях лонастей рабочего колеса относительно лонаток на1 авляющего аппарата гидротурбииы камеру (4) поворачивают вместе с илитон (32) на некоторый угол при номощи тяги (36).
Для определения иоля давления но нерабочел новер- ности лонасти рабочего колеса 1;у. (1) заменяют ил кулачок другого нрофиля.
Д.ч.ч (П)еделепия но.чя давления в ра;;нь; цилиндрических сечениях межлоиас.тного канала применяют сменные кулачки (1) с профилем, еоответству1оп ;1М,нрофилто лопасти, взятому в исследуемом сечении.
И р е д м е т и з о б р к т е и и я
1.Способ оиределепия ноля да1 ления в ме;к,лопастпых каналах )абочих колес. гидром;ииин (турбин, насосов, комнрессо1ов), о т л и ч а ю щ и и с я тем, что, с цельт обеспечения возможности определения поля давления но цилиндрическому с(ченаю канала вра да1ощегося рабочего колеса, датчик, воспринимающий давленне гидравлической среды, перемещают через 5 е йтоиастн01 канал нараллельно или ночти нараллельно оси вращения i)aбочего 1;олеса со скоростью, являютцейся (ГУпкцпс угла наклона касательной нр(филя лонасти, взятого в ее цилпидрнчееко1 сечении.
2.Устройст)0 для осуп1,ествлення снособа но п. 1. о т л и ч а ю HI, с. е с я тем, что, с н,(лью обеснечения возможности перемеп1;ения датчика давления при его относпте. движении о отношению к ,;оигсти вращаюикмося рабочего ко.теса по кривой, нкви.дистантно нрофялю лопаст, нри.ченен 1,15еденный в камеру гидр||М:1 пины стержень, кестко укрен.ННпыи па качаюи емся рычаге, нрижимаемо5 дейCTisrteii пружины к профильному кулачку, врап1,а10И1,емуся )онпо с ва.том гндромап1ипы.
3.Форма выполнения устро;;ства пи п.. 2, о т .1 и ч а 10 щ а я е я тем, что близ.лежаи нй к центру участст; нрофильпого кулачка присоединен к основной проф1ыьной его части при номощи даифы.
4.Форма вынолнения устройства но п. 2, отличающаяся тем, что кулачок жестко укреплен па диске втулки, поддерживающем рычаг is исходпом неподвижном положении.
5.Форма выполнения устройства по UH. 2 и 4, отличающаяся тем. что .д.тя нодкода нр: фнльното кулачка иод
i;; 4;uuiji,njt;i рычаг лутс.ч осевого иере.меЩ(11Ш1 втулки .ченен соленоид, включаг.кый Ч .рс:; контакт, расиолсскенный на пр;).((хся вале.
(). JCTpoiicTBO К) ни. 2 к 4, о т л ич а ю щ с е с я тем, что. с целью обеспеченпк возможности ()нределе 1ня поля давления ио лсе.чу цилиндрическому сеченню нежлонастного канала нутом углового (.1еь(ення профильного кулачка, втулка, несущая профильный кулачок, сочленена, с ведущргм вали1;(.;м нрп помощи хранови1;а, для вкл 0 с1гия сооачкгг Kiiroporu во
1-;1) iiaijOTi) гндромалшны npiiMjHiH пе1)еставляемын г,)учну)о рычаг,
7, Форма в; ;нолнен Я устройства по ин. 2, 4 н (), отличающаяся тем, что, с Щлыи и йснечсння В()з,и);кн1)сти (.нррделендя давления в ме;:,-лона1тно,м кана,1е нун ра.ч/лчиых нол(1; л:ниях .lonacrefi рабочего колеса ктносительно лоi.aTOK направлякнцего aHnaiiara, ка.мера рабочего колеса выполнена ji.t;,ipoTHon л л;естк-о соедпнена с основанием, песущпм качаюнщнся l)ычal н втулк) с нрофн; ьiiiJM i;A.ia4i;uM.
Фиг. 2
31
je
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для уплотнения стержня, вводимого в камеру рабочего колеса гидромашины | 1954 |
|
SU106616A1 |
| Врубовая машина | 1946 |
|
SU71447A1 |
| Устройство для автоматического управления циклом работы исполнительных органов гидрофицированных станков и других машин | 1951 |
|
SU95055A1 |
| ШВЕЙНАЯ МАШИНА ДЛЯ ПОЛУЧЕНИЯ ПРЯМОЙ И ЗИГЗАГООБРАЗНОЙ СТРОЧЕК | 1969 |
|
SU237575A1 |
| Счетчик единиц | 1956 |
|
SU117861A1 |
| МАШИНА ДЛЯ ИЗГОТОВЛЕНИЯ ЭЛЕКТРИЧЕСКИХ ЛАМП НАКАЛИВАНИЯ И ТОМУ ПОДОБНЫХ ПРИБОРОВ | 1926 |
|
SU45554A1 |
| КЛАВИШНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 1972 |
|
SU324662A1 |
| Автоматизированный склад | 1978 |
|
SU710874A1 |
| Станок для шаговой подачи листовой резины на обработку | 1972 |
|
SU438547A1 |
| Пробоотборник | 1954 |
|
SU103271A1 |

ft- ,r-.J-Ф
(- а