Изобретение относится к машиностроению и предназначено, главным образом, для использования при создании манипуляторов роботов и протезов.
Известны тросовые приводы шарниров манипуляторов, в том числе схватов роботов, включающие запасованный на установленные на закрепленных в подвижных элементах шарнира валах шкивы эластичный или неэластичный трос, приводящий шарнир в действие передачей на подвижные элементы шарнира усилий от источника механической энергии.
Главное достоинство тросовых приводов манипуляторов заключается в том, что они позволяют значительно снизить массогабаритные и инерционные характеристики шарниров манипулятора за счет вывода источников механической энергии из конструкций шарниров, а также снимают ограничения на массогабаритные характеристики самих источников механической энергии и позволяют установить их в удобном для закрепления и обслуживания месте.
Существует множество конструкций протезов и манипуляторов роботов с тросовыми приводами. Аналогами изобретения могут служить изобретение «Механическая кисть», защищаемое патентом RU 2245120, захватное устройство по патенту РФ 2502592, тяговый протез в работе «Анализ работы тягового протеза, расчет натяжений нити в протезе» (http://os-russia.com/SBORNIKI/KON-244-2.pdf), а также антропоморфическая кисть руки для робота, созданная робототехниками из университета Вашингтона в Сиэтле (http://roboting.ru/1963-noveyshaya-antropomorficheskaya-kist-ruki-dlya-robota.html).
Конструкции этих протезов и манипуляторов являются рычажно-шарнирными механическими системами. Шарниры в конструкциях схватов представленных аналогов приведены тросами, запасованный на шкивы или на специальные желоба в подвижных и/или несущих элементах конструкции. При этом их объединяют общие взаимосвязанные недостатки - сравнительно низкие силомоментные характеристики приведенных тросами шарниров и ограниченный угол отклонения подвижных элементов.
Главная причина низких силомоментных характеристик известных конструкций манипуляторов роботов и протезов с тросовыми приводами подвижных элементов шарниров заключается в том, что конструкции шарниров манипуляторов роботов и протезов имеют геометрические ограничения, не позволяющие создать достаточной величины плечи приложения сил натяжения тросов для создания моментов сил на подвижных элементах шарниров.
Главная причина ограничений углов отклонений подвижных элементов известных конструкций шарниров с тросовым приводом заключается в том, что величина плеча моментов сил, создаваемых тросом на подвижном элементе, и максимальный угол отклонения подвижного элемента находятся в сложной обратной зависимости:
 или
или
где М - величина момента сил на подвижном элементе, Т = величина натяжения троса, L = величина расстояния от оси шарнира до оси опорного ролика или до точки крепления троса на подвижном элементе, ϕ = величина угла относительного отклонения смежных подвижных элементов.
Таким образом, при увеличении плеча действия силы натяжения троса, создающей отклоняющий момент сил на подвижном элементе шарнира при сгибании манипулятора, уменьшается максимальный угол отклонения подвижного элемента в шарнире. То есть, уменьшается подвижность манипулятора, его способность фиксировать и удерживать объекты.
Эти свойства известных конструкций манипуляторов с тросовым приводом шарниров ограничивают их эффективность и применимость.
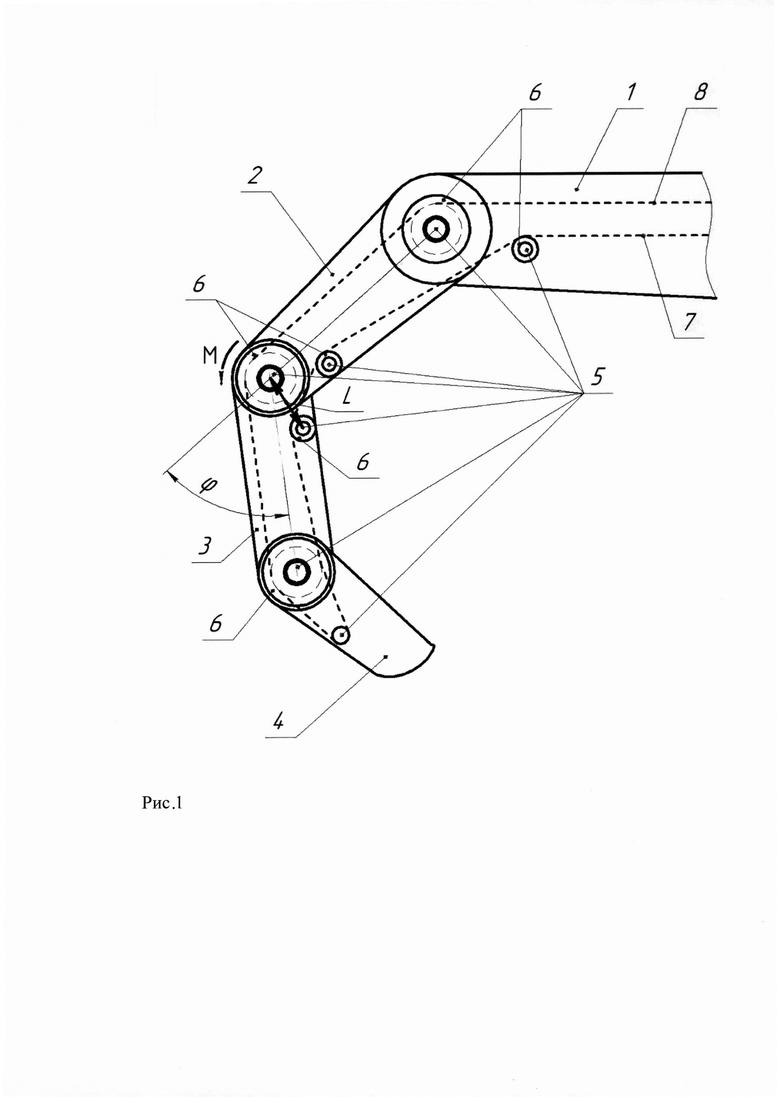
Наиболее наглядно этот недостаток конструкций представлен на схеме тягового управления пальцеобразного манипулятора протеза в работе «Анализ работы тягового протеза, расчет натяжений нити в протезе» (Рис 1).
На схеме изображены фаланги пальцеподобного манипулятора протеза, образованные подвижными элементами шарниров с фиксированными осями. Подвижные элементы 1-4 манипулятора приведены тросами сгибающим 7 и разгибающим 8, опирающимися на установленные на закрепленных в подвижных элементах валах 5 шкивы 6. Трос 7 обеспечивает сгибание манипулятора сведением подвижных элементов 1-4 шарниров. Трос 8 обеспечивает разгибание манипулятора разведением подвижных элементов шарниров. Подвижные элементы манипулятора изображены в положении предельных углов отклонений, при которых тяговые тросы остаются в пределах объема подвижных элементов. Дальнейшее сгибание пальцеподобного манипулятора с соответствующим увеличением угла отклонения фаланг приведет к выходу тросов за пределы объема фаланг и контакту тросов с охватываемым манипулятором объектом. При этом усилие, с которым пальцеподобный манипулятор может фиксировать объект, определяется моментами сил, которые создают на подвижных элементах силы давления тросов на шкивы или на точку закрепления тросов в последней.
Задачей изобретения является повышение эффективности и применимости манипуляторов с тросовым приводом.
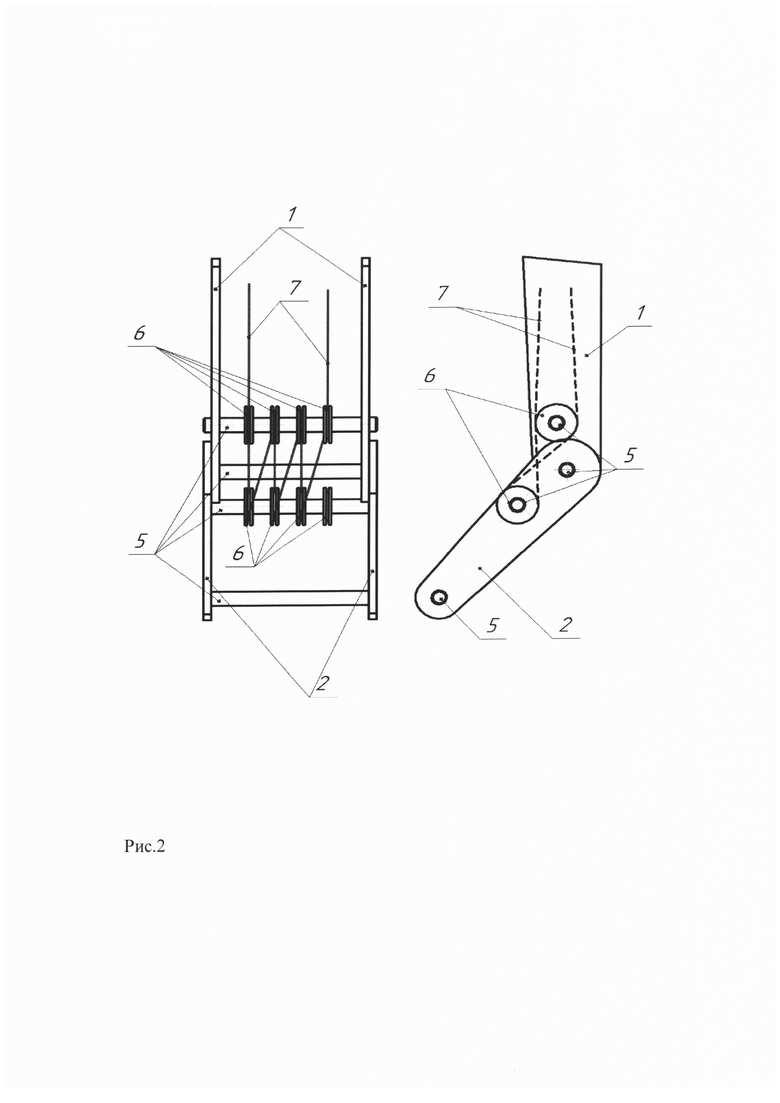
Задача решается тем, что для создания момента сил на подвижных элементах шарниров манипуляторов применяют силовой полиспаст, для чего в конструкции смежных подвижных элементов шарниров встраивают валы с установленными на них роликами и запасованным на них тросом, оба конца которого раздельно или после соединения в один трос подаются на тяговое устройство источника механической энергии. Схематическое изображение шарнира манипулятора с полиспастовым приводом сгибания подвижных элементов приведено на Рис 2 и Рис 3.
Работает такой тросовый привод следующим образом.
Тяговое устройство источника механической энергии привода создает натяжение троса/тросов 7 сгибания, запасованного/запасованных в ролики 6 полиспаста с валами 5 в подвижных элементах 1, 2 шарнира манипулятора. На валы 5 действует сводящая их сила, равная силе натяжения троса, умноженной на кратность полиспаста. Кратность полиспаста определяется количеством пар роликов, в которые запасован трос. В результате, при сохранении величины плеча действия силы натяжения тросов, кратно увеличивается момент сил, отклоняющий подвижные элементы при сгибании манипулятора и схватывании объекта. Величина момента сил на подвижном элементе, приведенном полиспастом, возрастет, примерно, как:  где k - кратность полиспаста.
где k - кратность полиспаста.
Соответственно, повышаются эффективность и применимость манипулятора за счет того, что он может манипулировать объектами большей массы или оказывать на них большие силомоментные воздействия.
Разгибание манипулятора, или разведение смежных подвижных элементов его шарниров осуществляют любым известным способом. В том числе, тросом-антагонистом с приводом от источника механической энергии, или упругими элементами различного вида и т.п.
При разгибании манипулятора происходит обращение полиспаста из силового в скоростной. Для обеспечения высокой скорости разгибания манипулятора оба конца приводного троса 7 полиспаста выполняются ходовыми. При отдаче ходовых концов обратным ходом тягового устройства источника механической энергии привода полиспаста обеспечивается быстрое разведение смежных элементов шарниров манипулятора.
Привод может быть выполнен с эластичным тросом или неэластичным.
Использование изобретения при создании протезов с приведенными активными элементами и шарнирно-рычажных манипуляторов роботов и схватов для них позволит существенно повысить эффективность их двигательных действий и расширить применимость.
| название | год | авторы | номер документа |
|---|---|---|---|
| Рычажно-полиспастный привод шарниров манипуляторов | 2020 |
|
RU2744471C1 |
| Способ создания подвижного соединения твердых тел | 2019 |
|
RU2729150C1 |
| УСТРОЙСТВО ПОЗИЦИОННОГО ОЧУВСТВЛЕНИЯ ПОДВИЖНОСТИ ПАЛЬЦЕВ ИСКУССТВЕННОЙ КИСТИ | 2019 |
|
RU2712306C1 |
| Робототехнический комплекс для безлюдного возведения строений/укрытий на Луне | 2020 |
|
RU2751836C1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ | 2013 |
|
RU2541816C2 |
| Способ градуировки многокомпонентных датчиков сил и моментов и устройство его реализующее | 2017 |
|
RU2637721C1 |
| Сервисный мобильный робот и комплект монтируемых на обслуживаемых объектах устройств для обмена сменными модулями и жидкими материалами | 2023 |
|
RU2840834C2 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| ПАЛЕЦ ТЯГОВОГО ПРОТЕЗА И УСТРОЙСТВО ПРОТЕЗА КИСТИ И ПРОТЕЗА ПРЕДПЛЕЧЬЯ С ТАКИМИ ПАЛЬЦАМИ | 2020 |
|
RU2759777C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ АКТИВНЫЙ ПРОТЕЗ РУКИ | 1993 |
|
RU2068247C1 |

Изобретение относится к медицине, а именно к тросовым приводам шарниров манипуляторов, протезов и схватов рабочих органов роботов. Привод включает закрепленные в подвижных элементах шарнира валы с установленными на них шкивами. На шкивах запасован эластичный или неэластичный трос, приводящий шарнир в действие передачей на подвижные элементы шарнира усилий от источника механической энергии. Шкивы на валах с запасованным на них тросом образуют силовой полиспаст. Достигается повышение эффективности приводов шарниров манипуляторов. 1 з.п. ф-лы, 3 ил.
1. Тросовый привод шарниров манипуляторов, в том числе протезов и схватов рабочих органов роботов, включающий закрепленные в подвижных элементах шарнира валы с установленными на них шкивами и запасованный на шкивах эластичный или неэластичный трос, приводящий шарнир в действие передачей на подвижные элементы шарнира усилий от источника механической энергии, отличающийся тем, что шкивы на валах с запасованным на них тросом образуют силовой полиспаст.
2. Тросовый привод шарниров манипуляторов по п. 1, отличающийся тем, что заходящая и сходящая ветви троса на полиспасте являются ходовыми и соединяются с тяговым устройством источника механической энергии порознь или после соединения в один трос.
| ШАРНИРНЫЙ УЗЕЛ МАНИПУЛЯТОРА | 1995 |
|
RU2156688C2 |
| US 5570920 A1, 05.11.1996 | |||
| US 5501498 A1, 26.03.1996 | |||
| US 4865376 A1, 12.09.1989 | |||
| US 5207114 A1, 04.05.1993. | |||

