Изобретение относится к судостроению, а именно к способам испытаний безэкипажных и автономных надводных судов. Способ может быть использован для определения маневренных характеристик судов в условиях различных гидродинамических нагрузок.
Маневренные характеристики судна - это численные значения элементов циркуляции, рыскания, устойчивости на курсе и тормозного пути, определяемые при проведении натурных испытаний. Существующие способы определения маневренных и ходовых характеристик судов регламентируются Руководством по определению маневренных характеристик судов, НД № 2-030101-007 – Российский морской регистр судоходства, 2005 г., Резолюцией Комитета по безопасности на море Международной морской организации MSC. 137(76) «Стандарты маневренных качеств судов», при этом данные документы не приводят точных способов выполнения маневренных испытаний и аппаратуры для регистрации параметров в процессе испытаний. Стандарты маневренных качеств судов выделяют 6 основных качеств маневренности, которые оцениваются путем нормирования соответствующих характеристик: собственная динамическая устойчивость, устойчивость на курсе, начальная поворотливость/способность изменения курса, возможность удерживания судна при повороте, поворотливость и тормозная способность.
Маневренные испытания судов при наличии экипажа на борту выполняются путем подачи команд капитаном или другим лицом, проводящим испытания. При этом суть всех команд сводится к управлению главными двигателями, движителями и рулем (подруливающими устройствами). Результатом выполнения команд являются маневры типа набор скорости или торможение судна, движение при постоянном курсе, «циркуляция», «зигзаг», разворот и т.п. В ходе испытаний фиксируются и измеряются следующие параметры: позиция (координаты) судна; направление диаметральной плоскости судна; скорость судна; угол перекладки руля и скорость перекладки; число оборотов движителя; шаг гребного винта в случае винта регулируемого шага; скорость и направление ветра и т.п. В результате испытаний определяются предельные тактико-технические возможности судна при движении и маневрировании.
Для безэкипажных или автономных судов, управление движением которых производится с использованием аппаратно-программных технических средств, приведенный способ не приемлем.
Известен способ испытаний модели судна в опытовом бассейне по патенту RU 2132796, заключающийся в определении кинематических параметров движения модели буксируемого судна и гидродинамических нагрузок, действующих на нее, при движении модели судна в опытовом бассейне по заданной криволинейной траектории с заданным радиусом циркуляции.
Недостатком известного способа является то, что в процессе испытаний фиксируются параметры движения модели судна по заданной траектории движения тележки в опытовом бассейне, тогда как на реальное судно в условиях открытой водной акватории действуют дополнительные внешние воздействия, связанные с ветровыми нагрузками, течениями воды и неравномерностью работы приводного двигателя, движителей и рулевых устройств, команд членов экипажа судна, что существенно влияет на маневренные качества судна.
Известен способ контроля мореходности судна и устройство для его осуществления, описанный в патенте RU № 2467914, опубл. 27.11.2012. Способ основан на измерении периода бортовой качки, осадки носом и кормой, периода волны, курсового угла и скорости судна на нерегулярном волнении, определении метацентрической высоты и измерении углового перемещения судна относительно продольной, поперечной и вертикальной центральных осей, измерение истинных высоты волн и курсовых углов прихода волн относительно диаметральной плоскости судна и определении скорости и курсового угла течения и величины потери скорости судна от ветра и волнения. Дополнительно используются спутниковые системы высокого разрешения типа ASTER или SRTM данного района плавания, по которым посредством программ моделирования водной поверхности, атмосферных и астрономических явлений производится рендеринг окружающей обстановки, восстанавливается топология корпуса судна путем построения цифровой модели с учетом волнового и ветрового воздействий.
Недостатком известного аналога является сложность его реализации, связанная с большим количеством измерительных датчиков, которые необходимо устанавливать на судне, тарировать, настраивать и т.п. Кроме того для обработки поступающих данных необходимо использовать несколько разнородных по своему функционалу программных комплексов.
Среди известных аналогов наиболее близким по технической сущности и назначению является способ экспериментального определения параметров движения судна с использованием оборудования по патенту RU 144079, опубл. 10.08.2014. Натурные испытания судна основаны на определении набора параметров движения судна с использованием установленного на судне измерительного комплекса определения траектории по заданному углу перекладки руля.
В состав оборудования, реализующего способ, включены датчик угла перекладки руля, инерциальный измерительный модуль, мультиантенная приемная аппаратура спутниковых навигационных систем, антенный модуль, управляющий компьютер и связанная с ними регистрирующая аппаратура. При проведении испытаний антенный модуль принимает сигналы со спутников навигации, затем передает их на мультиантенную приемную аппаратуру спутниковых навигационных систем, где эти сигналы обрабатываются и преобразуются в данные (скорость судна, широта, долгота, а также координаты в декартовой системе, высота в географической системе координат, угол курса судна). Инерциальный измерительный модуль регистрирует значения угла крена и угла дифферента, затем дополняет ими данные, полученные с мультиантенной приемной аппаратуры спутниковых навигационных систем, и передает их на регистрирующую аппаратуру. На регистрирующей аппаратуре происходит запись полученных данных дополненных показаниями датчика угла перекладки руля. Измерения и запись данных проводится в режиме реального времени. Управление работой инерциального измерительного модуля производится при помощи управляющего компьютера.
Недостатком данного способа является то, что его невозможно использовать для безэкипажных или автономных судов, поскольку они имеют более сложный движительный комплекс, состоящий из нескольких винторулевых колонок или движительно-двигательных комплексов типа «Азипод» и для оценки их маневренных параметров недостаточно показаний одного датчика угла перекладки руля. Кроме того, судно может быть оснащено подруливающими устройствами на носу или корме, и в случае инструментального определения угла перекладки каждого из возможных движителей, комплекс не обеспечивает достоверность соответствия траектории движения судна заданным углам их перекладки.
Техническим результатом от использования изобретения является расширение функциональных возможностей способа за счет возможности проведения испытаний безэкипажных и автономных судов, повышение точности результатов испытаний, упрощение технических средств для маневренных испытаний судов.
Для достижения указанного результата используется следующая совокупность существенных признаков: в способе натурных испытаний безэкипажных судов, (основанном также как прототип на измерении параметров движения судна с использованием установленного на судне измерительного комплекса с входящей в его состав мультиантенной системы приема сигналов спутниковых навигационных систем и микрокомпьютера для обработки сигналов мультиантенной системы) в отличие от прототипа, измеренные параметры сравниваются с проектными характеристиками судна с возможностью передачи полученных результатов по радиоканалу на автоматизированное рабочее место оператора для последующего хранения, обработки и анализа переданных результатов, при этом измерительный комплекс выполнен функционально не зависимым от бортовой навигационной аппаратуры
Для получения необходимого технического результата в способе выполняется следующая последовательность действий: оператором с автоматизированного рабочего места задается движение судну со скоростью Vi по маршрутным точкам П1, П2, … Пn, определяемым географическими координатами (широтой, долготой), с формированием прямолинейных участков с заданной длиной S1, S2, …. Sn и разворотных участков с заданным радиусом разворота R1, R2, … Rn, при этом каждый прямолинейный и радиусный участок (Sz и Rz) формируют отдельный этап испытаний – Z, каждый последующий из которых – Z+1 усложняется за счет сокращения прямолинейного участка Sz+1 и уменьшения радиуса разворотного участка Rz+1, при этом при прохождении каждого этапа испытаний с помощью мультиантенной системы сигналов спутниковых навигационных систем измеряют фактическую длину пройденного маршрута на участке – sz, фактический радиус разворота при переходе между прямолинейными участками – rz, фактическую скорость прохождения участка – vz, фактическое время прохождения расстояния – tz, максимальное боковое отклонение от заданной линии пути – bz между маршрутными точками, полученные данные передаются оператору для определения соотношения измеренных и заданных параметров движения судна:  ,
,
 при этом, если при прохождении судном соответствующего участка соотношения указанных параметров находятся в пределах 90–110%, то считают, что судно удачно прошло этот этап испытаний и может быть допущено до следующего этапа, если соотношения выходят за пределы 110%, то считают, что судно не прошло этот этап и достигло своих максимальных ходовых и маневренных характеристик.
при этом, если при прохождении судном соответствующего участка соотношения указанных параметров находятся в пределах 90–110%, то считают, что судно удачно прошло этот этап испытаний и может быть допущено до следующего этапа, если соотношения выходят за пределы 110%, то считают, что судно не прошло этот этап и достигло своих максимальных ходовых и маневренных характеристик.
Сущность предлагаемого способа заключается в определении маневренных и ходовых характеристик безэкипажного судна путем сравнения измеренных параметров движения судна с его проектными характеристиками в условиях поэтапного усложнения маршрута движения и выполнения маневров судном, включающего прямые и разворотные участки. Указанный результат достигается за счет использования независимого измерительного комплекса, обеспечивающего определение текущего географического положения (широта, долгота), скорости и курса движения судна. Эти данные обрабатываются в автоматическом режиме с использованием микрокомпьютера, делается вывод о различных отклонениях от расчетного маршрута движения судна, результаты по радиоканалу передаются оператору. Таким образом, способ позволяет экспериментальными средствами определить параметры движения судна и выявить маневренные и ходовые качества в различных гидрометеорологических условиях и передать информацию на автоматизированное рабочее место оператора с помощью радиомодема или по сетям мобильной связи для последующего хранения, обработки и анализа данных.
Предлагаемый способ может быть реализован устройством, содержащим: мультиантенную систему приема сигналов спутниковых навигационных систем, микрокомпьютер для обработки сигналов мультиантенной системы и радиомодем. Устройство выполнено в отдельном корпусе и не связано с навигационной или управляющей системой судна, что обеспечивает его полную независимость от указанной аппаратуры при проведении натурных испытаний безэкипажных судов.
Сопоставление предлагаемого способа и прототипа показало, что поставленная задача – возможность проведения маневренных испытаний безэкипажных и автономных судов решается в результате новой совокупности признаков, что доказывает соответствие предлагаемого изобретения критерию патентоспособности «новизна».
В свою очередь, проведенный информационный поиск в области судостроения не выявил решений, содержащих отдельные отличительные признаки заявляемого способа, что позволяет сделать вывод о соответствии способа критерию «изобретательский уровень».
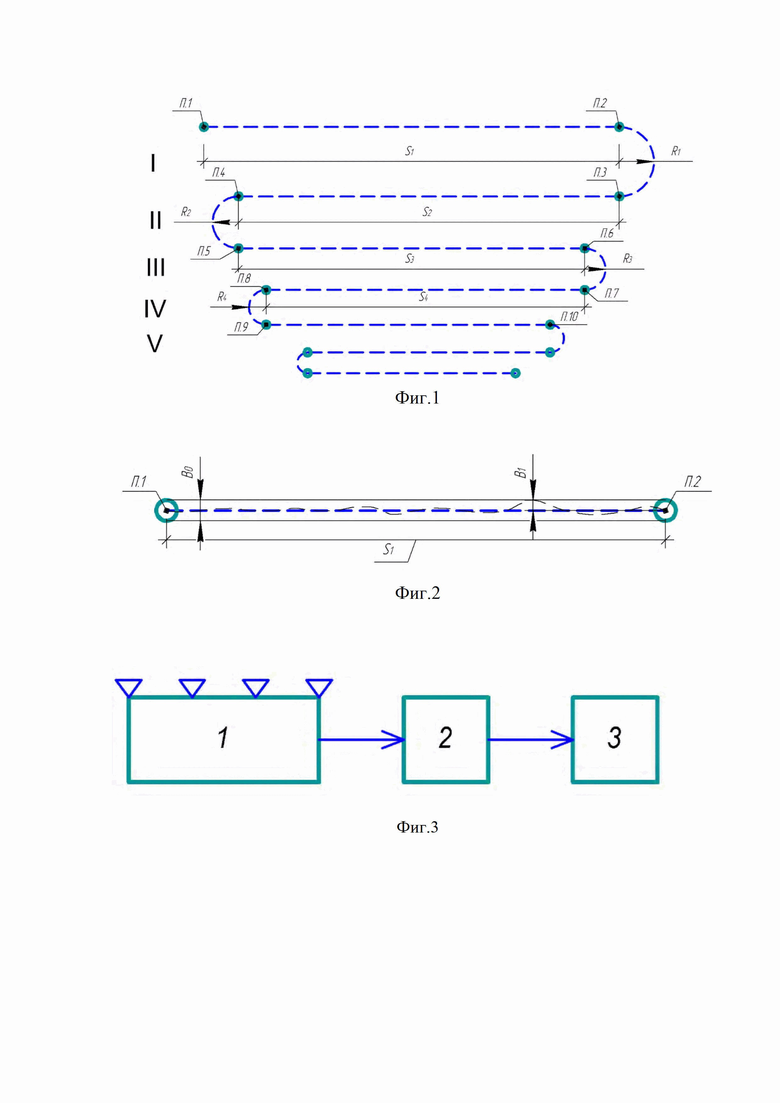
Сущность указанного способа поясняется графическими материалами, где: на фиг.1 представлена схема этапов испытаний безэкипажного судна, на фиг.2 - схема определения максимального бокового отклонения судна, на фиг.3 – структурная схема устройства, реализующая способ.
На фиг.1, 2 обозначены: П1, П2, … Пn – заданные путевые точки для движения безэкипажного судна; S1, S2, …. Sn – заданное расстояние между путевыми точками (длина прямолинейного участка 1, 2, … n); R1, R2, … Rn – заданный радиус разворота при переходе между прямолинейными участками; I, II, III … – этапы испытаний. На фиг.3 представлен измерительный комплекс содержащий: мультиантенную систему приема сигналов спутниковых навигационных систем 1, микрокомпьютер для обработки сигналов мультиантенной системы 2, радиомодем 3.
Предлагаемый способ включает следующую последовательность действий: Оператор с помощью радиомодема 3 выдает судну задание на движение со скоростью Vi по маршруту, обозначенному точками П1, П2, … Пn, которые формируют прямолинейные участки с расчетной длиной S1, S2, …. Sn и разворотные участки с радиусом разворота R1, R2, … Rn. При этом каждый прямолинейный и разворотный участок (например – Sz и Rz) соответствует отдельному этапу испытаний – Z. Каждый последующий этап – Z+1 усложняется за счет сокращения прямолинейного участка Sz+1 и уменьшения радиуса разворотного участка Rz+1.
Кинематические характеристики движения испытуемого судна измеряют с помощью независимой мультиантенной системы приема сигналов спутниковых навигационных систем. Полученные данные могут быть обработаны микрокомпьютером непосредственно на борту судна или оператором на автоматизированном рабочем месте. С целью оценки ходовых и маневренных качеств судна программным методом рассчитываются 5 следующих нормируемых параметров:
 – отношение фактической (измеренной) длины прямолинейного участка i к заданной длине участка i;
– отношение фактической (измеренной) длины прямолинейного участка i к заданной длине участка i;  – отношение фактического (измеренного) радиуса разворотного участка i к заданному радиусу разворота i;
– отношение фактического (измеренного) радиуса разворотного участка i к заданному радиусу разворота i;  – отношение фактической (измеренной) скорости движения судна на прямолинейном участке i к заданной скорости движения судна на участке i;
– отношение фактической (измеренной) скорости движения судна на прямолинейном участке i к заданной скорости движения судна на участке i;  – отношение фактического (измеренного) времени прохождения судном участка i к заданному времени прохождения участка i;
– отношение фактического (измеренного) времени прохождения судном участка i к заданному времени прохождения участка i;  – отношение фактического (измеренного) максимального бокового отклонения судна при прохождении судном участка i на заданной линии пути к заданной ширине участка i.
– отношение фактического (измеренного) максимального бокового отклонения судна при прохождении судном участка i на заданной линии пути к заданной ширине участка i.
По значениям полученных соотношений оператор делает вывод о маневренных характеристиках исследуемого судна. Если при прохождении этапа Z судном, соотношения находятся в пределах 90–110%, считается что судно удачно прошло этап испытаний Z и допускается до следующего этапа Z+1. Если они вышли за пределы 110%, считается, что судно не прошло этот этап и достигло своих максимальных ходовых и маневренных характеристик.
Пример
Для апробирования способа было выполнено моделирование испытаний надводного судна проекта Волгодон 507Б в безэкипажном режиме на навигационном тренажере в Ладожском озере. При тренажерном моделировании судно управлялось с использованием компьютерного дифференциального регулирования, т.е. в отсутствие экипажа. С учетом маневренных характеристик судна был синтезирован расчетный маршрут движения, состоящий из пяти прямолинейных галсов (I – V) различной протяженности и четырех циркуляционных галсов, расположенных по маршруту с уменьшением расстояния и радиуса кривизны. Начало циркуляционного радиуса обозначено четной путевой точкой (П2, П4, П6, П8, П10), окончание нечетной (П1, П3, П5, П7, П9).Таким образом общее количество путевых точек, использованных для построения маршрута, составляет 10 (П1 – П10).
Ширина ходовой полосы и левой части ходовой полосы определены с учетом фактической гидрометеорологической обстановки в момент проведения испытания. В рассматриваемом примере ширина ходовой полосы принята равной двойной ширине судна проекта Волгодон 507Б – 34 метра, ширина левой части ходовой полосы принята 17 метров. Соответственно для циркуляционного галса ширина ходовой полосы определена с учетом возможного прямого и обратного смещения и принята равной половине длины судна – 70 метров.
Координаты путевых точек испытательного маршрута представлены в таблице 1.
Таблица 1
Параметры прямолинейных и циркуляционных галсов представлены в таблице 2.
Таблица 2
(метры)
(метры)
Результаты эксперимента по критерию длины представлены в таблице 3.
Таблица 3
(метры)
(метры)
Результаты эксперимента по критерию радиуса 
Таблица 4
(метры)
(метры)
Результаты эксперимента по критерию скорости  представлены в таблице 5.
представлены в таблице 5.
Таблица 5
(м/с)
(м/с)
Результаты эксперимента по критерию времени  представлены в таблице 6.
представлены в таблице 6.
Таблица 6
(метры)
(метры)
Результаты эксперимента по критерию бокового отклонения  представлены в таблице 7. Расчет критерия осуществляется только в том случае, если судно вышло за пределы ходовой полосы. Если судно не вышло за пределы ходовой полосы, считается, что условие выполнено.
представлены в таблице 7. Расчет критерия осуществляется только в том случае, если судно вышло за пределы ходовой полосы. Если судно не вышло за пределы ходовой полосы, считается, что условие выполнено.
Таблица 7
(метры)
(метры)
Из приведенных выше результатов видно, что большая часть фактических (измеренных) параметров соответствует заданным. Иными словами, измеренные ходовые характеристики испытуемого судна практически полностью совпадают с его паспортными техническими данным, что позволяет сделать вывод о возможности использования способа для проведения натурных испытаний безэкипажных судов, дающих объективную оценку.
Предлагаемое изобретение было создано сотрудниками ФГБОУ ВО «Государственный университет морского и речного флота имени адмирала С.О. Макарова» в составе научно-исследовательских работ.
В дальнейшем, способ предполагается использовать для определения ходовых и маневренных характеристик безэкипажных или автономных надводных судов в различных метеорологических условиях.
Изложенное позволяет сделать вывод о соответствии изобретения критерию «промышленная применимость».
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ натурных испытаний безэкипажных судов | 2022 |
|
RU2797701C1 |
| СПОСОБ РАННЕЙ ДИАГНОСТИКИ НЕДИФФЕРЕНЦИРОВАННОЙ СОЕДИНИТЕЛЬНОТКАННОЙ ДИСПЛАЗИИ У ДЕТЕЙ ПЕРВОГО ГОДА ЖИЗНИ | 2010 |
|
RU2454922C1 |
| СПОСОБ ПРОГНОЗА ФОРМИРОВАНИЯ НАРУШЕНИЙ ВЕГЕТАТИВНОЙ НЕРВНОЙ СИСТЕМЫ У ДЕТЕЙ РАННЕГО ВОЗРАСТА, ПЕРЕНЕСШИХ ЦЕРЕБРАЛЬНУЮ ИШЕМИЮ В ПЕРИОДЕ НОВОРОЖДЕННОСТИ | 2010 |
|
RU2449722C2 |
| СПОСОБ ПРОГНОЗИРОВАНИЯ ОСЛОЖНЕНИЙ КИШЕЧНЫХ СТОМ | 2024 |
|
RU2839442C1 |
| СПОСОБ ДИАГНОСТИКИ ДЕПРЕССИИ У МУЖЧИН С ДЕФИЦИТОМ ТЕСТОСТЕРОНА | 2024 |
|
RU2826209C1 |
| СПОСОБ ДИАГНОСТИКИ РАССЕЯННОГО СКЛЕРОЗА | 2014 |
|
RU2581028C1 |
| ПОЕЗДНАЯ МОДУЛЬНАЯ ПЕРЕДАЮЩАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2017 |
|
RU2683592C1 |
| СПОСОБ ТОЧНОЙ ПОСАДКИ ВОЗДУШНЫХ СУДОВ | 1998 |
|
RU2199472C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА ОБРЫВА НА ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 2013 |
|
RU2540443C1 |
| ТРЕХФАЗНАЯ ПОЛЮСОПЕРЕКЛЮЧАЕМАЯ ОБМОТКА | 1990 |
|
RU2014711C1 |
Изобретение относится к способу натурных испытаний безэкипажных судов. При проведении испытаний измеряют параметры движения судна с использованием установленного на судне измерительного комплекса с мультиантенной системой приема сигналов спутниковых навигационных систем и микрокомпьютера, сравнивают измеренные параметры с проектными характеристиками судна, передают полученные результаты по радиоканалу на автоматизированное рабочее место оператора для последующего их хранения, обработки и анализа. Обеспечивается повышение точности результатов испытаний, упрощение технических средств для проведения маневренных испытаний судов. 1 з.п. ф-лы, 1 пр., 7 табл., 3 ил.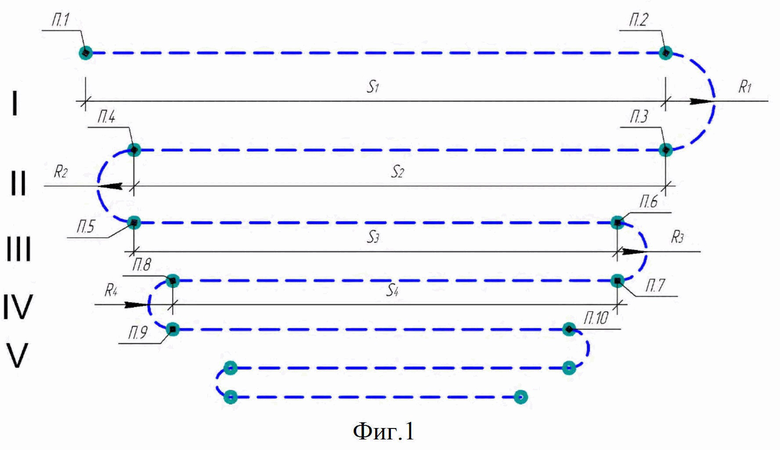
1. Способ натурных испытаний безэкипажных судов, основанный на измерении параметров движения судна с использованием установленного на судне измерительного комплекса с входящей в его состав мультиантенной системы приема сигналов спутниковых навигационных систем и микрокомпьютера для обработки сигналов мультиантенной системы, отличающийся тем, что измеренные параметры сравниваются с проектными характеристиками судна с возможностью передачи полученных результатов по радиоканалу на автоматизированное рабочее место оператора для последующего хранения, обработки и анализа переданных результатов, при этом измерительный комплекс выполнен функционально не зависимым от бортовой навигационной аппаратуры.
2. Способ по п.1, отличающийся тем, что оператором с автоматизированного рабочего места задается движение судну со скоростью Vi по маршрутным точкам П1, П2, … Пn, определяемым географическими координатами (широтой, долготой), с формированием прямолинейных участков с заданной длиной S1, S2, …. Sn и разворотных участков с заданным радиусом разворота R1, R2, … Rn, при этом каждый прямолинейный и радиусный участок (Sz и Rz) формируют отдельный этап испытаний – Z, каждый последующий из которых – Z+1 усложняется за счет сокращения прямолинейного участка Sz+1 и уменьшения радиуса разворотного участка Rz+1, при этом при прохождении каждого этапа испытаний с помощью мультиантенной системы сигналов спутниковых навигационных систем измеряют фактическую длину пройденного маршрута на участке – sz, фактический радиус разворота при переходе между прямолинейными участками – rz, фактическую скорость прохождения участка – vz, фактическое время прохождения расстояния – tz, максимальное боковое отклонение от заданной линии пути – bz между маршрутными точками, полученные данные передаются оператору для определения соотношения измеренных и заданных параметров движения судна: 
 при этом, если при прохождении судном соответствующего участка соотношения указанных параметров находятся в пределах 90–110%, то считают, что судно удачно прошло этот этап испытаний и может быть допущено до следующего этапа, если соотношения выходят за пределы 110%, то считают, что судно не прошло этот этап и достигло своих максимальных ходовых и маневренных характеристик.
при этом, если при прохождении судном соответствующего участка соотношения указанных параметров находятся в пределах 90–110%, то считают, что судно удачно прошло этот этап испытаний и может быть допущено до следующего этапа, если соотношения выходят за пределы 110%, то считают, что судно не прошло этот этап и достигло своих максимальных ходовых и маневренных характеристик.
| Трехходовой клапанный кран для пневматических систем | 1960 |
|
SU144079A1 |
| СПОСОБ МАНЕВРЕННЫХ ИСПЫТАНИЙ МОДЕЛИ СУДНА В ОПЫТОВОМ БАССЕЙНЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2132796C1 |
| CN 106568444 A, 19.04.2017 | |||
| CN 110516877 A, 29.11.2019 | |||
| CN 110979594 A, 10.04.2020. | |||

