Область техники
[0001]
Настоящее изобретение относится к способам управления движением транспортного средства и устройствам управления движением транспортного средства.
УРОВЕНЬ ТЕХНИКИ
[0002]
Была раскрыта традиционная методика, в которой в случае, когда транспортное средство приближается к ETC (зарегистрированный товарный знак), выполняется управление скоростью, а в случае, когда транспортное средство приближается к пункту сбора оплаты с человеком, пользователь уведомляется о выключении управления скоростью.
СПИСОК ЦИТИРУЕМОЙ ЛИТЕРАТУРЫ
ПАТЕНТНАЯ ЛИТЕРАТУРА
[0003]
Патентная литература 1: Публикация заявки на патент Японии № 2004-355145
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
ТЕХНИЧЕСКАЯ ПРОБЛЕМА
[0004]
Вышеупомянутая технология основана на допущении, что для пункта сбора оплаты с человеком водитель осуществляет руление транспортным средством после уведомления, потому что водитель уведомляется об отключении управления скоростью. Следовательно, если водитель не осуществляет руление транспортным средством должным образом, транспортное средство может не подойти достаточно близко к пункту сбора оплаты с человеком, что затрудняет выполнение таких действий, как уплата сбора.
[0005]
Настоящее изобретение было сделано в свете вышеупомянутой проблемы, и его задача состоит в том, чтобы предоставить способ управления движением транспортного средства и устройство управления движением транспортного средства, которые способны направлять транспортное средство к пункту взимания платы, предусмотренному на полосе движения без рулевого управления водителя.
РЕШЕНИЕ ПРОБЛЕМЫ
[0006]
Способ управления движением транспортного средства в соответствии с аспектом настоящего изобретения включает в себя, этап, на котором, после того как определено, что транспортное средство въехало в полосу движения, на которой предусмотрен пункт взимания платы, направляют транспортное средство в положение, смещенное от центра полосы движения к пункту взимания платы в направлении ширины полосы движения, к моменту, когда транспортное средство достигает пункта взимания платы.
ПРЕИМУЩЕСТВЕННЫЕ ЭФФЕКТЫ ИЗОБРЕТЕНИЯ
[0007]
Настоящее изобретение позволяет направлять транспортное средство к пункту взимания платы, расположенному на полосе движения, без рулевого управления водителя.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008]
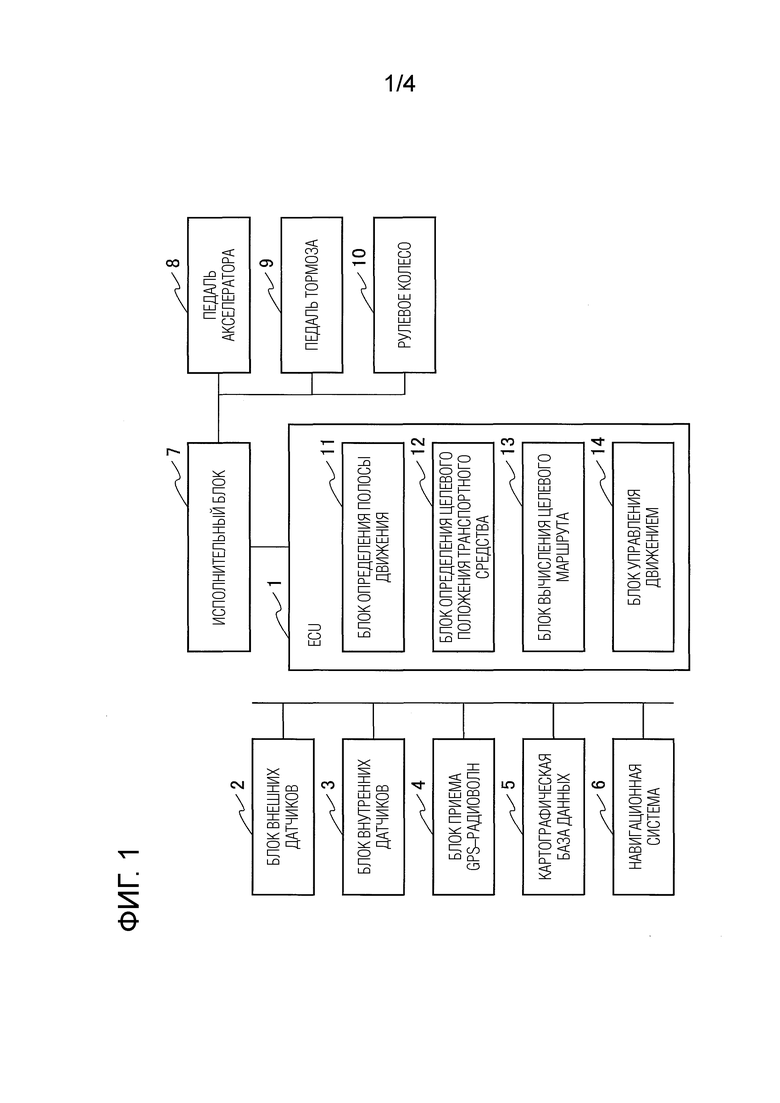
[Фиг. 1] Фиг. 1 является функциональной блок-схемой, иллюстрирующей часть транспортного средства, оборудованного устройством управления движением транспортного средства согласно варианту осуществления настоящего изобретения.
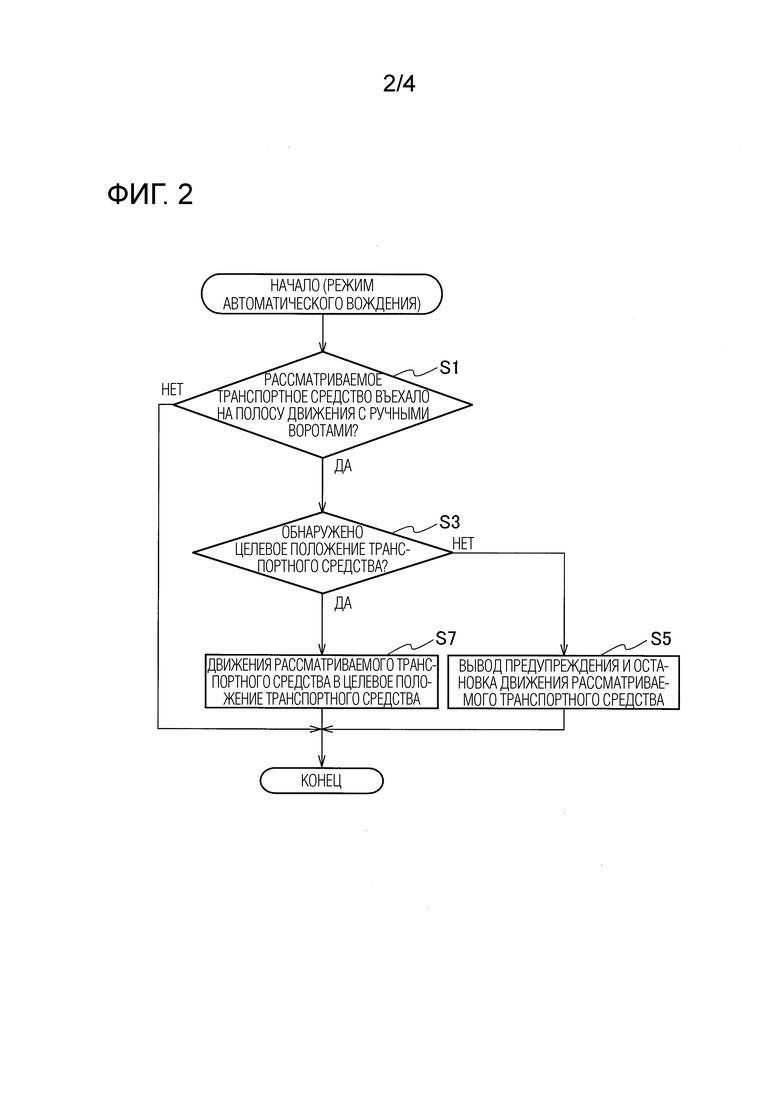
[Фиг. 2] Фиг. 2 - блок-схема последовательности операций, поясняющая способ управления движением транспортного средства, выполняемый ECU (ЭБУ) 1.
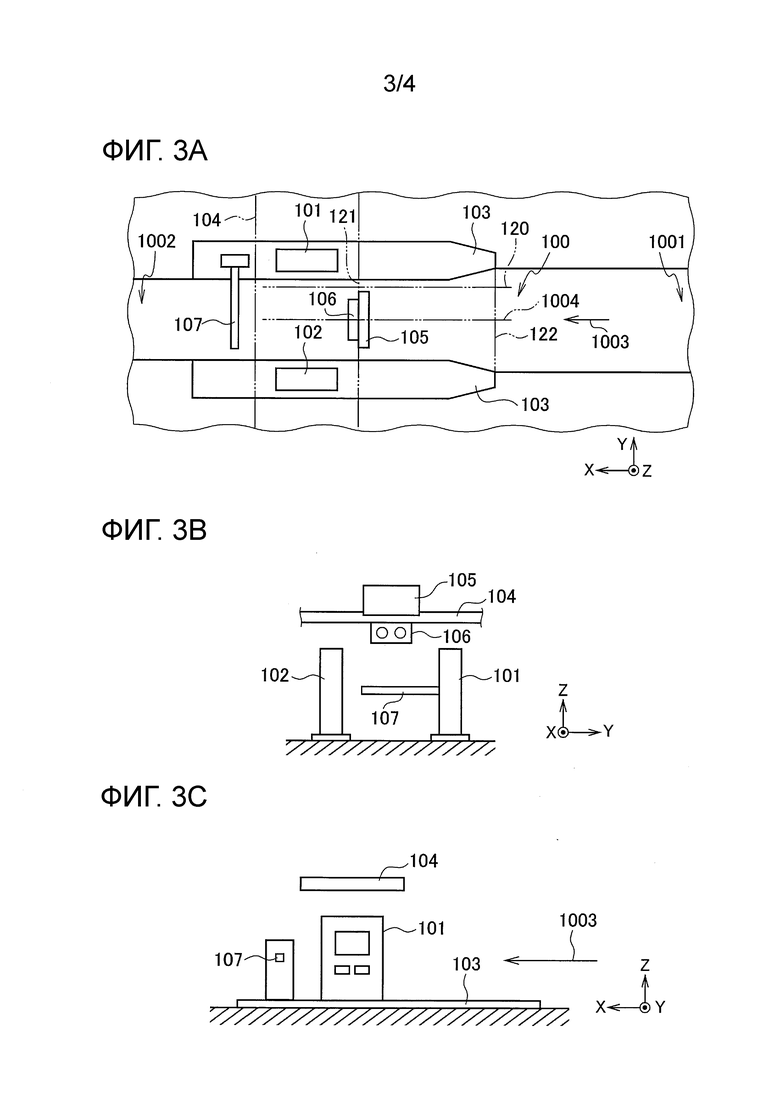
[Фиг. 3A] Фиг. 3A - вид сверху примера структуры полосы движения с ручными воротами и целевого положения транспортного средства.
[Фиг. 3B] Фиг. 3B - вид спереди примера структуры полосы движения с ручными воротами.
[Фиг. 3C] Фиг. 3C - вид сбоку примера структуры полосы движения с ручными воротами.
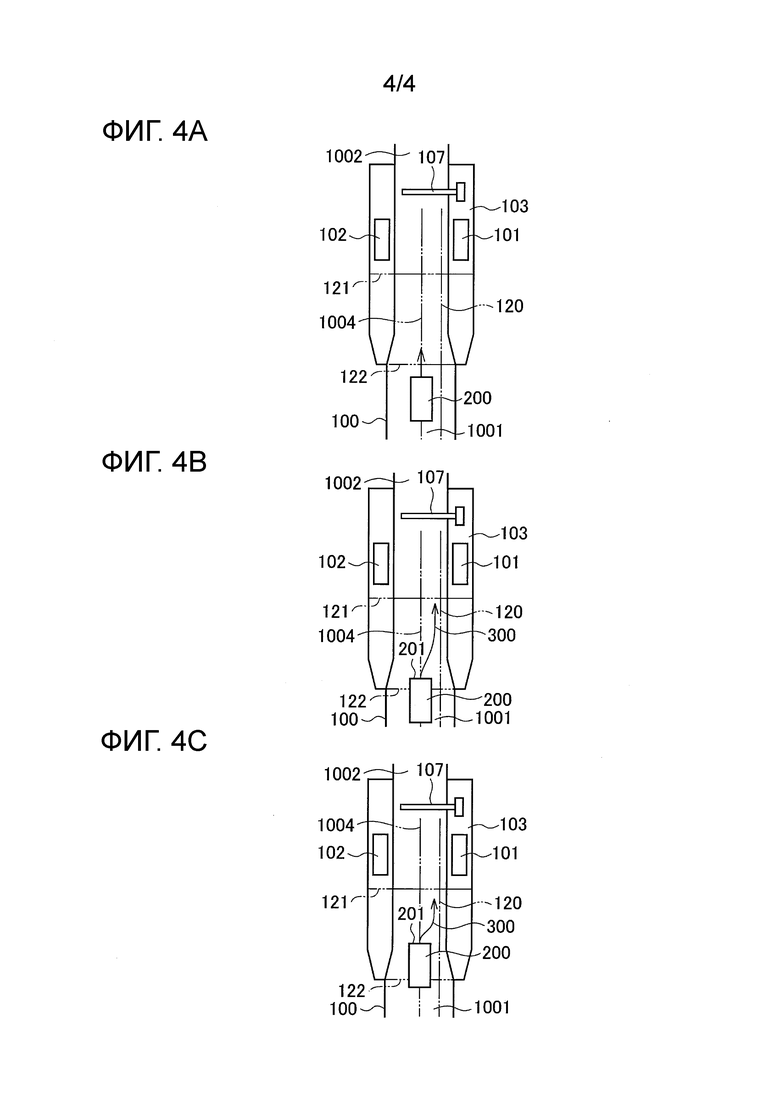
[Фиг. 4A] Фиг. 4A - вид сверху примера состояния, когда транспортное средство въехало в полосу движения с ручными воротами.
[Фиг. 4B] Фиг. 4B - вид сверху примера целевого маршрута, по которому транспортное средство подъезжает к аппарату сбора платежей в направлении ширины полосы движения.
[Фиг. 4C] Фиг. 4C - вид сверху другого примера целевого маршрута, по которому транспортное средство подъезжает к аппарату сбора платежей в направлении ширины полосы движения.
Описание вариантов осуществления
[0009]
Далее будет подробно описан вариант осуществления настоящего изобретения со ссылкой на чертежи. В описании одинаковые составляющие будут обозначены одинаковыми символами, и их повторное описание будет опущено.
[0010]
Как показано на фиг. 1, транспортное средство включает в себя ECU (электронный блок управления) 1, блок 2 внешних датчиков, блок 3 внутренних датчиков, блок 4 приема GPS-радиоволн (глобальная система позиционирования), картографическую базу 5 данных, навигационную систему 6, исполнительный блок 7, педаль 8 акселератора, педаль 9 тормоза и рулевое колесо 10. Это транспортное средство называют «рассматриваемым транспортным средством», чтобы предотвратить путаницу этого транспортного средства с другими транспортными средствами.
[0011]
ECU 1 соответствует устройству управления движением транспортного средства, которое автоматически осуществляет руление транспортным средством и может быть реализовано с использованием микрокомпьютера, включающего в себя CPU (центральный процессор), память и блок ввода-вывода. Компьютерная программа, которая предписывает микрокомпьютеру функционировать как ECU 1, устанавливается и выполняется микрокомпьютером. Это позволяет микрокомпьютеру функционировать как ECU 1. Следует отметить, что хотя здесь будет описан пример, в котором ECU 1 реализован с помощью программного обеспечения, само собой разумеется, что ECU 1 может быть реализован с помощью выделенного аппаратного обеспечения, подготовленного для выполнения каждой обработки информации, которая будет описана ниже.
[0012]
Блок 2 внешних датчиков включает в себя радиолокационное устройство или камеру (обе не показаны) и выводит в ECU 1 изображения или информацию о положении объектов вокруг рассматриваемого транспортного средства, полученные от радиолокационного устройства или камеры. Камера также обнаруживает полосы движения. Блок 3 внутренних датчиков определяет величину приведения в действие педали 8 акселератора (движущая сила), величину приведения в действие педали 9 тормоза (тормозное усилие) и угол поворота рулевого колеса 10 (величина рулевого управления) и выводит результаты обнаружения в ECU 1.
[0013]
Блок 4 приема GPS-радиоволн получает положение рассматриваемого транспортного средства, принимая радиоволны от трех или более спутников GPS, и выводит положение в ECU 1 и навигационную систему 6.
[0014]
Картографическая база 5 данных включает в себя картографическую информацию областей, в которых движется рассматриваемое транспортное средство, и ECU 1 и навигационная система 6 ссылаются на картографическую информацию. Картографическая информация включает в себя информацию о расположении и прочем в отношении дорог, перекрестков и пунктов взимания платы, расположенных на платных дорогах.
[0015]
Информация о пунктах взимания платы включает в себя информацию о полосах движения, снабженных «автоматическими пунктами сбора оплаты», в которых транспортное средство может передавать или получать плату и билеты по беспроводной связи транспортного средства с дорогой без остановки (полоса движения с автоматическими пунктом сбора оплаты) и информацию о полосах движения, снабженных «ручными воротами», на которых транспортное средство временно останавливается, чтобы пользователи транспортных средств могли передать или получить плату и билеты (полоса движения с ручными воротами). Здесь, как описано выше, полосы движения, на которых не предусмотрены автоматические пункты сбора оплаты, называются «полосами движения с ручными воротами». Понятно, что полосы движения, которые снабжены автоматическими пунктами сбора оплаты, которые, тем не менее, вышли из строя и на которых человеку необходимо выполнять такие действия, как получение оплаты, рассматриваются как полосы движения с ручными воротами. Понятно также, что полосы движения, на которых вместо автоматического пункта сбора оплаты предусмотрен пункт взимания платы с человеком, считаются полосами движения с ручными воротами. На полосе движения с ручными воротами транспортное средство должно остановиться в пункте взимания платы, чтобы человек мог передать или получить плату и билет.
[0016]
Информация о полосе движения с ручными воротами включает в себя положение полосы движения с ручными воротами, положения въезда и выезда полосы движения с ручными воротами для транспортных средств, ширину полосы движения и длину полосы с ручными воротами. Здесь и далее въезд и выезд полосы движения с ручными воротами для транспортных средств просто называются въездом и выездом полосы движения с ручными воротами.
[0017]
Навигационная система 6 направляет рассматриваемое транспортное средство к месту назначения, установленному пользователем, таким как водитель рассматриваемого транспортного средства. Навигационная система 6 на основе каждого фрагмента информации, выводимого блоком 2 внешних датчиков, блоком 3 внутренних датчиков и блоком 4 приема GPS-радиоволн, рассчитывает запланированные пути движения к месту назначения и направляет рассматриваемое транспортное средство к месту назначения. Пользователь устанавливает, следует ли проезжать через ручные ворота или автоматические пункты сбора оплаты, и на основе этой информации о настройках устанавливаются ворота, через которые следует проезжать, на запланированных путях. Следует отметить, что ворота могут быть автоматически определены в соответствии с состоянием устройства в транспортном средстве (например, вставлена ли карта для проезда через автоматические пункты сбора оплаты).
[0018]
Исполнительный блок 7 включает в себя исполнительный механизм для изменения величины приведения в действие педали 8 акселератора, исполнительный механизм для изменения величины приведения в действие педали 9 тормоза и исполнительный механизм для изменения угла поворота рулевого колеса 10. Например, исполнительный блок 7 автоматически выполняет рулевое управление и управление тормозным усилием по целевому маршруту. Исполнительный блок 7 также способен автоматически осуществлять руление транспортным средством на основе информации о полосе движения, полученной камерой блока 2 внешних датчиков, обнаруживающей полосы движения.
[0019]
ECU 1 включает в себя блок 11 определения полосы движения, блок 12 определения целевого положения транспортного средства, блок 13 вычисления целевого маршрута и блок 14 управления движением в качестве функциональных составляющих, реализованных посредством выполнения компьютерной программы.
[0020]
Блок 11 определения полосы движения определяет, въехало ли рассматриваемое транспортное средство на полосу движения с ручными воротами, на основании положения рассматриваемого транспортного средства и информации о полосах движения с ручными воротами. Блок 12 определения целевого положения транспортного средства обнаруживает положение, в котором должно находиться рассматриваемое транспортное средство после того, как рассматриваемое транспортное средство подъезжает к аппарату сбора платежей на полосе движения с ручными воротами, в который могут быть брошены платежи, или к кабине, в которой располагается человек, который отвечает за сбор платежей. Здесь и далее аппараты, кабины и тому подобное, у которых транспортные средства останавливаются, как описано выше, в совокупности называются «пунктами взимания платы». Положение, в котором рассматриваемое транспортное средство должно находиться после того, как оно подъезжает к аппарату сбора платежей или к кабине, называется «целевым положением транспортного средства».
[0021]
Целевое положение транспортного средства в совокупности включает в себя то, что определяет положение рассматриваемого транспортного средства в направлении ширины полосы движения после того, как рассматриваемое транспортное средство подъезжает к пункту взимания платы и до того, как рассматриваемое транспортное средство останавливается у пункта взимания платы (далее именуемое «целевое положение 120 транспортного средства»), и что определяет положение рассматриваемого транспортного средства в направлении длины полосы движения (направление движения) после того, как рассматриваемое транспортное средство подъезжает к пункту взимания платы и до того, как рассматриваемое транспортное средство останавливается у пункта взимания платы (в дальнейшем называемое «целевое положение 121 транспортного средства»). Другими словами, целевое положение транспортного средства - это положение рассматриваемого транспортного средства до того, как рассматриваемое транспортное средство останавливается в пункте оплаты за проезду пункта взимания платы после того, как рассматриваемое транспортное средство подъезжает к пункту взимания платы. Как описано выше, направление транспортного средства к пункту взимания платы на полосе движения включает в себя перемещение транспортного средства в направлении ширины полосы движения ближе к пункту взимания платы, предусмотренному на полосе движения.
[0022]
Блок 13 вычисления целевого маршрута вычисляет целевой маршрут от позиции рассматриваемого транспортного средства, когда оно въезжает на полосу движения с ручными воротами, к целевому положению транспортного средства. Блок 14 управления движением автоматически управляет тормозным усилием, движущей силой и величиной рулевого управления, используя исполнительный блок 7, и, таким образом, выполняет управление движением транспортного средства для рассматриваемого транспортного средства. Состояние, в котором блок 14 управления движением выполняет управление движением транспортного средства, называется «режимом автоматического вождения», а состояние, в котором блок 14 управления движением не выполняет управление движением транспортного средства, называется «режимом ручного вождения». В режиме ручного вождения водитель должен сам управлять рулением, ускорением и замедлением рассматриваемого транспортного средства.
[0023]
Далее способ управления движением транспортного средства, выполняемый ECU 1, будет описан со ссылкой на фиг. 2. Здесь предполагается, что блок 14 управления движением выполняет управление движением транспортного средства на рассматриваемом транспортном средстве в соответствии с указаниями навигационной системы 6 на основе информации о запланированных путях движения. Другими словами, предполагается, что рассматриваемое транспортное средство находится в режиме автоматического вождения. ECU 1 последовательно выполняет управление движением транспортного средства, показанное на блок-схеме последовательности операций на фиг. 2.
[0024]
Как показано на фиг. 2, во-первых, блок 11 определения полосы движения определяет диапазон полосы движения с ручными воротами на основе положения полосы движения с ручными воротами, ширины полосы движения и длины полосы движения с ручными воротами, а затем определяет, въехало ли рассматриваемое транспортное средство на полосу движения с ручными воротами, сравнивая положение рассматриваемого транспортного средства и диапазон полосы движения с ручными воротами (S1). В случае, когда рассматриваемое транспортное средство не въехало на полосу движения с ручными воротами (НЕТ на S1), процесс заканчивается.
[0025]
Следует отметить, что блок 11 определения полосы движения может получать информацию о запланированном пути движения, рассчитанном навигационной системой 6, и определять, въехало ли рассматриваемое транспортное средство на полосу движения с ручными воротами, на которой предусмотрен пункт взимания платы, установленный на запланированном пути движения (S1).
[0026]
В случае, когда рассматриваемое транспортное средство въехало на полосу движения с ручными воротами (ДА на S1), блок 12 определения целевого положения транспортного средства пытается получить целевое положение транспортного средства на основе информации, выведенной блоком 2 внешних датчиков, и информации о полосе движения с ручными воротами (S3).
[0027]
Например, есть случаи, когда на полосе движения с ручными воротами есть упавший объект или что-то подобное, и трудно направить рассматриваемое транспортное средство к пункту взимания платы, другими словами, есть случаи, когда целевое положение транспортного средства не может быть обнаруженным (НЕТ на S3). В этом случае ECU 1 выводит голосовое предупреждение из навигационной системы 6, например, «Транспортное средство не может подъехать к аппарату сбора платежей. Транспортное средство выполнит аварийную остановку.» и блок 14 управления движением управляет исполнительным блоком 7, чтобы немедленно остановить движение рассматриваемого транспортного средства (S5), и затем процесс заканчивается.
[0028]
С другой стороны, например, в случае, когда нет упавшего предмета и т.п., и целевое положение транспортного средства может быть обнаружено (ДА на S3), процесс переходит к этапу S7.
[0029]
На этапе S7 ECU 1 выводит голосовое сообщение из навигационной системы 6, например, «Транспортное средство автоматически подъедет к аппарату сбора платежей.» и блок 14 управления движением управляет исполнительным блоком 7 таким образом, что рассматриваемое транспортное средство продолжает движение для перемещения в целевое положение транспортного средства до того, как рассматриваемое транспортное средство достигает пункта взимания платы (S7), и затем процесс заканчивается.
[0030]
Как описано выше, рассматриваемое транспортное средство автоматически перемещается в целевое положение транспортного средства до того, как рассматриваемое транспортное средство достигает пункта взимания платы, другими словами, рассматриваемое транспортное средство подъезжает к пункту взимания платы, и, таким образом, водителю не нужно осуществлять руление рассматриваемым транспортным средством (не нужно осуществлять руление ручкой), что снижает нагрузку на водителя. Если автоматическое управление движением прекращается, когда транспортное средство въезжает на полосу движения с ручными воротами, водитель должен осуществлять руление транспортным средством, чтобы направить его к пункту взимания платы. Однако, такое рулевое управление не является необходимым в этом случае.
[0031]
На этапе S7, например, блок 13 вычисления целевого маршрута вычисляет целевой маршрут от положения рассматриваемого транспортного средства, когда оно въезжает на полосу движения с ручными воротами, к целевому положению транспортного средства, и блок 14 управления движением управляет исполнительным блоком 7 таким образом, что рассматриваемое транспортное средство движется по целевому маршруту и перемещается в целевое положение транспортного средства. Другими словами, блок 14 управления движением автоматически выполняет рулевое управление и управление тормозным усилием по целевому маршруту.
[0032]
Кроме того, на этапе S7 пользователь транспортного средства заранее уведомляется посредством голосового сообщения, как описано выше, что такое управление движением транспортного средства будет выполняться. Следует отметить, что ECU 1 может отображать текст или что-то подобное, например «Транспортное средство автоматически подъедет к аппарату сбора платежей» на навигационной системе 6, чтобы уведомить пользователя об управлении движением транспортного средства. Поскольку пользователь транспортного средства заранее уведомляется об управлении движением транспортного средства, как описано выше, посредством голосового сообщения или отображения, пользователь транспортного средства может заранее знать, что будет выполнено управление движением транспортного средства. Таким образом, можно уменьшить умственную нагрузку пользователя.
[0033]
Далее будет проиллюстрирована структура полосы движения с ручными воротами, и способ управления движением транспортного средства в этом варианте осуществления будет описан конкретно.
[0034]
Как показано на фиг. 3A, 3B и 3C, имеется аппарат 101 сбора платежей, иными словами, пункт взимания платы, в котором пользователи транспортных средств выполняют действия, такие как оплата платежей, на полосе 100 движения с ручными воротами. В данном случае пункт взимания платы означает аппарат или кабину, причем предполагается, что в положении рядом с ним (на боковой стороне пункта взимания платы) будут временно останавливаться транспортные средства. Это определение не зависит от того, есть ли персонал или нет, и обрабатываются ли деньги. Пункты взимания платы в этом определении не ограничиваются платными дорогами, но включают в себя аппараты или кабины для управления въездом и выездом транспортных средств на стоянки и со стоянок или тому подобное. Пункты взимания платы в этом определении также включают в себя аппараты, которые автоматически выдают билеты для въезда, и аппараты, включающие в себя устройство считывания карт для аутентификации карточек водителей для въезда и выезда. Следует отметить, что в странах или регионах, где транспортные средства движутся по левой стороне дороги, аппарат 101 сбора платежей расположен с правой стороны полосы 100 движения с ручными воротами, как видно из въезда 1001 полосы 100 движения с ручными воротами, другими словами, если смотреть в направлении движения 1003 транспортного средства. На рис. 3А, 3В и 3С, направления просмотра обозначены X, Y и Z.
[0035]
Через полосу 100 движения с ручными воротами от аппарата 101 сбора платежей расположен аппарат 102 сбора платежей, который предназначен для следующей полосы движения с ручными воротами. Аппараты 101 и 102 сбора платежей находятся на островах 103, которые на один уровень выше полос движения с ручными воротами.
[0036]
Аппараты 101 и 102 сбора платежей являются примерами «пункта взимания платы, предусмотренного на полосе движения», а «пункт взимания платы, предусмотренный на полосе движения» означает пункт взимания платы, предусмотренный, чтобы быть обращенным к полосе движения, чтобы транспортные средства, движущиеся по полосе движения могли выполнять действия в пункте взимания платы. Транспортные средства, движущиеся по полосе 100 движения с ручными воротами, могут выполнять действия с аппаратом 101 сбора платежей. Другими словами, аппарат 101 сбора платежей является примером пункта взимания платы, предусмотренного быть обращенным к полосе 100 движения с ручными воротами, и представляет собой пункт взимания платы, примыкающий к полосе 100 движения с ручными воротами. Транспортные средства, движущиеся по полосе 100 движения с ручными воротами, не могут выполнять действия с аппаратом 102 сбора платежей. Другими словами, поскольку аппарат 102 сбора платежей не предусмотрен быть обращенным к полосе 100 движения с ручными воротами, аппарат 102 сбора платежей не является пунктом взимания платы, примыкающим к полосе 100 движения с ручными воротами.
[0037]
Аппараты 101 и 102 сбора платежей имеют общую крышу 104 над ними. Вывеска 105 и сигнал 106 светофора прикреплены к концевым частям крыши 104 на ближней стороне в направлении движения транспортного средства, так что их можно увидеть с ближней стороны в направлении движения транспортного средства. Вывеска 105 и сигнал 106 светофора расположены, например, на концевых участках крыши 104 на ближней стороне в направлении движения транспортного средства.
[0038]
Рядом с выездом 1002 из полосы 100 движения с ручными воротами расположен шлагбаум 107. Как показано на чертежах, когда шлагбаум 107 блокирует верхнюю часть полосы 100 движения с ручными воротами, транспортные средства не могут выехать с полосы 100 движения с ручными воротами. Когда шлагбаум 107 не блокирует полосу движения, транспортные средства могут выезжать с полосы 100 движения с ручными воротами.
[0039]
Как показано на фиг. 3А, целевое положение 120 транспортного средства установлено в положение, смещенное от центра 1004 полосы движения к аппарату 101 сбора платежей в направлении ширины полосы движения для полосы 100 движения с ручными воротами.
[0040]
Поскольку аппарат 101 сбора платежей предусмотрен на острове 103, блок 12 определения целевого положения транспортного средства обнаруживает остров 103, например, путем обработки изображения, снятого камерой блока 2 внешних датчиков, и оценивает расстояние от положения рассматриваемого транспортного средства до острова 103. Затем блок 12 определения целевого положения транспортного средства устанавливает целевое положение 120 транспортного средства на основе расстояния и положения рассматриваемого транспортного средства. Блок 12 определения целевого положения транспортного средства может определять ширину полосы движения на полосе 100 движения с ручными воротами из изображения, захваченного камерой блока 2 внешних датчиков, и устанавливать целевое положение 120 транспортного средства на основе ширины полосы движения и положения рассматриваемого транспортного средства.
[0041]
В качестве альтернативы, например, поскольку вывеска 105 и сигнал 106 светофора расположены перед аппаратом 101 сбора платежей в направлении движения транспортного средства, целевое положение 121 транспортного средства устанавливается в положение под вывеской 105 и сигналом 106 светофора. Целевое положение 121 транспортного средства может быть установлено в положение под концом крыши 104 на ближней стороне в направлении движения транспортного средства.
[0042]
В этом случае, например, блок 12 определения целевого положения транспортного средства обнаруживает область вывески 105 или тому подобного по изображению впереди рассматриваемого транспортного средства, захваченному камерой блока 2 внешних датчиков, и измеряет расстояние между рассматриваемым транспортным средством и вывеской 105 или тому подобным на основании изменения во времени размера обнаруженной области. Блок 12 определения целевого положения транспортного средства устанавливает целевое положение 121 транспортного средства на основании расстояния и положения рассматриваемого транспортного средства.
[0043]
Следует отметить, что высота вывески 105 или тому подобного может быть предварительно сохранена, и горизонтальное расстояние между рассматриваемым транспортным средством и вывеской 105 или тому подобным может быть определено на основе расстояния, определенного из изображения, и высоты.
[0044]
Блок 12 определения целевого положения транспортного средства устанавливает положение 122 начала управления, которое служит в качестве руководства для запуска управления движением транспортного средства на этапе S7. Поскольку конец острова 103 на ближней стороне в направлении движения транспортного средства расположен перед целевым положением 121 транспортного средства (под вывеской 105 и сигналом 106 светофора) в направлении движения транспортного средства, положение 122 начала управления устанавливается, например, к боковой части конца острова 103 на ближней стороне в направлении движения транспортного средства.
[0045]
В этом случае, так же, как и для целевого положения 121 транспортного средства, блок 12 определения целевого положения транспортного средства, например, измеряет расстояние между рассматриваемым транспортным средством и концом острова 103 на ближней стороне в направлении движения транспортного средства на основе изображения впереди рассматриваемого транспортного средства, захваченного камерой блока 2 внешних датчиков. Блок 12 определения целевого положения транспортного средства устанавливает положение 122 начала управления на основе расстояния и положения рассматриваемого транспортного средства.
[0046]
Следует отметить, что высокоточная карта, на которой хранятся контуры таких структур, как вывеска 105 и остров 103, может храниться заранее. Когда целевые положения 120 и 121 транспортного средства и положение 122 начала управления обнаружены, сигналы или изображение, полученное от радиолокационного устройства или камеры блока 2 внешних датчиков, сравниваются с высокоточной картой, и расстояние до структур может измеряться с использованием результатов сравнения.
[0047]
Кроме того, для целевых положений 120 и 121 транспортного средства и положения 122 начала управления могут использоваться положения, полученные путем соответствующего смещения положений, полученных посредством обнаружения, вместо того, чтобы использовать их как есть.
[0048]
Рассматриваемое транспортное средство 200, показанное на фиг. 4А, въехало на полосу 100 движения с ручными воротами. Блок 12 определения целевого положения транспортного средства этого рассматриваемого транспортного средства 200 обнаруживает целевые положения 120 и 121 транспортного средства из положения рассматриваемого транспортного средства 200.
[0049]
Затем, как показано на фиг. 4В, блок 13 вычисления целевого маршрута вычисляет целевой маршрут 300 от положения рассматриваемого транспортного средства 200, в качестве начальной точки, до положения транспортного средства, в котором боковая поверхность 202 или тому подобное рассматриваемого транспортного средства 200 располагается в целевом положении 120 транспортного средства, и передний конец 201 или тому подобное рассматриваемого транспортного средства 200 расположен в целевом положении 121 транспортного средства, другими словами, до целевого положения транспортного средства. Следует отметить, что часть рассматриваемого транспортного средства 200, настроенная на целевое положение 120 транспортного средства, может быть другой частью рассматриваемого транспортного средства 200 (например, колесом) вместо переднего конца 201. Часть рассматриваемого транспортного средства 200, настроенная на целевое положение 121 транспортного средства, может быть другой частью рассматриваемого транспортного средства 200 (например, центральной частью в направлении ширины транспортного средства) вместо боковой поверхности 202.
[0050]
Затем, как показано на фиг. 4В, например, после того, как передний конец 201 рассматриваемого транспортного средства 200 проходит положение 122 начала управления, блок 14 управления движением управляет исполнительным блоком 7 для движения рассматриваемого транспортного средства 200 по целевому маршруту 300. Установка большого расстояния между целевым положением 121 транспортного средства и положением 122 начала управления обеспечивает движение без быстрого рулевого управления.
[0051]
В случае, когда целевое положение 121 транспортного средства установлено, например, в положение перед аппаратом 101 сбора платежей, вместо положения до аппарата 101 сбора платежей в направлении движения транспортного средства, целевой маршрут 300, включающий в себя быстрое рулевое управление, должен быть рассчитан в некоторых случаях. В настоящем варианте осуществления, поскольку целевое положение 121 транспортного средства устанавливается в положение до аппарата 101 сбора платежей в направлении движения транспортного средства, как описано выше, до вычисления целевого маршрута 300, целевой маршрут 300, не связанный с быстрым рулевым управлением, может быть рассчитан. Другими словами, возможно направить рассматриваемое транспортное средство 200 к аппарату 101 сбора платежей в подходящее время.
[0052]
Водитель рассматриваемого транспортного средства 200, которое переместилось в целевые положения 120 и 121 транспортного средства, может перемещать рассматриваемое транспортное средство 200 просто прямо и останавливать рассматриваемое транспортное средство 200 у аппарата 101 сбора платежей, чтобы выполнять такие действия, как уплата платежа. Когда водитель выполняет такие действия, как уплата платежа за проезд, шлагбаум 107, который блокировал полосу 100 движения с ручными воротами, подпрыгивает, и рассматриваемое транспортное средство 200 может выезжать из полосы 100 движения с ручными воротами. Следует отметить, что блок 14 управления движением может управлять исполнительным блоком 7 для автоматической остановки рассматриваемого транспортного средства 200 перед аппаратом 101 сбора платежей. В этом случае водителю не нужно нажимать педаль тормоза. Голосовое сообщение или экранное отображение могут использоваться перед аппаратом 101 сбора платедей, чтобы побудить водителя остановиться.
[0053]
Как было описано выше, поскольку настоящий вариант осуществления позволяет направить рассматриваемое транспортное средство 200 в положение, сдвинутое от центра полосы движения к пункту взимания платы, такому как аппарат 101 сбора платежей, в направлении ширины полосы движения, в соответствующий момент времени после того, как рассматриваемое транспортное средство 200 въезжает на полосу 100 движения с ручными воротами, можно уменьшить нагрузку на операцию рулевого управления водителя для ручного направления рассматриваемого транспортного средства 200 к пункту взимания платы. Другими словами, настоящий вариант осуществления позволяет направить рассматриваемое транспортное средство 200 к пункту взимания платы, не полагаясь на операцию рулевого управления водителя в полосе 100 движения с ручными воротами.
[0054]
Здесь будет описан предпочтительный пример целевого маршрута 300. Как проиллюстрировано на фиг. 4C, блок 13 вычисления целевого маршрута вычисляет целевой маршрут 300 таким образом, что рассматриваемое транспортное средство 200 движется в центре 1004 в направлении ширины полосы движения для полосы 100 движения с ручными воротами, прежде чем подъезжать к пункту взимания платы, и блок 14 управления движением управляет рассматриваемым транспортным средством 200 вдоль целевого маршрута 300.
[0055]
Если рассматриваемое транспортное средство 200 не движется в центре 1004, но рассматриваемое транспортное средство 200 подъезжает к аппарату 101 сбора платежей перед въездом в полосу 100 движения с ручными воротами, весьма вероятно, что скорость транспортного средства в этот момент времени является высокой и что рассматриваемое транспортное средство 200 должно быть замедлено, пока оно подъезжает к аппарату 101 сбора платежей.
[0056]
С другой стороны, в случае, когда рассматриваемое транспортное средство 200 движется в центре 1004 полосы 100 движения с ручными воротами в направлении ширины полосы движения, во многих случаях замедление рассматриваемого транспортного средства 200 заканчивается в этот момент времени. Таким образом, можно направлять рассматриваемое транспортное средство 200 к аппарату 101 сбора оплаты, в то время как рассматриваемое транспортное средство 200 движется с низкой скоростью после замедления. Эта операция дает водителю меньший дискомфорт по сравнению со случаем, когда рассматриваемое транспортное средство 200 не движется в центре 1004.
[0057]
Для управления движением транспортного средства, в котором рассматриваемое транспортное средство 200 движется в центре 1004 полосы 100 движения с ручными воротами, также предпочтительно, чтобы водитель был заранее уведомлен о том, что это управление предназначено для таких действий, как оплата дорожного сбора или подобное. Это обеспечивает эффект, что водитель может легко понять, что управление движением транспортного средства предназначено для таких действий, как оплата дорожного сбора.
[0058]
Следует отметить, что в настоящем варианте осуществления, в случае, когда почти нет возможности того, что целевые положения 120 и 121 транспортного средства не могут быть обнаружены, процесс может непосредственно перейти к этапу S7 без выполнения этапа S3. Кроме того, хотя предпочтительно перемещаться в центре 1004 полосы 100 движения с ручными воротами при перемещении в целевое положение транспортного средства, это не является существенным. На этапе S7 нет необходимости заранее уведомлять пользователя об управлении движением транспортного средства. В альтернативном варианте целевое положение 121 транспортного средства в направлении движения не устанавливается, но на этапе S7 рассматриваемое транспортное средство перемещается только в целевое положение 120 транспортного средства в направлении ширины полосы движения.
[0059]
Хотя в настоящем варианте осуществления устройство управления движением транспортного средства установлено на целевом транспортном средстве, на котором выполняется управление движением транспортного средства, настоящее изобретение не ограничивается этим примером. Устройство управления движением транспортного средства может быть установлено на серверном устройстве, выполненным с возможностью связи с целевым транспортным средством, или на другом транспортном средстве, которое не является целевым транспортным средством. Необходимая информация и инструкции могут обмениваться посредством связи между серверным устройством или другим транспортным средством и целевым транспортным средством для удаленного выполнения того же или аналогичного способа управления движением транспортного средства. Связь между серверным устройством и целевым транспортным средством может быть выполнена посредством беспроводной связи или связи между транспортным средством и дорогой. Связь между другим транспортным средством и целевым транспортным средством может быть выполнена посредством так называемой связи между транспортными средствами (vehicle-to-vehicle communication).
[0060]
Хотя вариант осуществления настоящего изобретения был описан выше, не следует понимать, что описания и чертежи, составляющие часть этого раскрытия, ограничивают изобретение. Из этого раскрытия для специалистов в данной области техники будут очевидны различные альтернативные варианты осуществления, примеры и методы работы.
ПЕРЕЧЕНЬ ПОЗИЦИОННЫХ ОБОЗНАЧЕНИЙ
[0061]
1 ECU
2 блок внешних датчиков
3 блок внутренних датчиков
4 блок приема GPS-радиоволн
5 картографическая база данных
6 навигационная система
7 исполнительный блок
8 педаль акселератора
9 педаль тормоза
10 рулевое колесо
11 блок определения полосы движения
12 блок определения целевого положения транспортного средства
13 блок вычисления целевого маршрута
14 блок управления движением
100 полоса движения с ручными воротами
101, 102 аппарат сбора платежей
103 остров
104 крыша
105 вывеска
106 сигнал светофора
107 шлагбаум
120, 121 целевое положение транспортного средства
122 положение начала управления
200 рассматриваемое транспортное средство
201 передний конец рассматриваемого транспортного средства
202 боковая поверхность рассматриваемого транспортного средства
300 целевой маршрут
1001 въезд в полосу движения с ручными воротами
1002 выезд с полосы движения с ручными воротами
1003 направление движения
1004 центр полосы движения с ручными воротами
Изобретение относится к способам и устройствам управления движением транспортного средства. Способ управления движением транспортного средства содержит этапы, на которых определяют, въехало ли транспортное средство на полосу движения, на которой предусмотрен пункт взимания платы, и после того, как определено, что транспортное средство въехало в упомянутую полосу движения, направляют транспортное средство в положение, смещенное от центра полосы движения к пункту взимания платы в направлении ширины полосы движения, к моменту, когда транспортное средство достигает пункта взимания платы. Устройство управления движением транспортного средства, которое содержит камеру, которая обнаруживает полосы движения, и исполнительный механизм, который автоматически осуществляет руление транспортным средством на основе информации о полосе движения. Причем устройство содержит блок определения полосы движения и блок управления движением. Достигается повышение безопасности водителя транспортного средства. 2 н. и 9 з.п. ф-лы, 8 ил.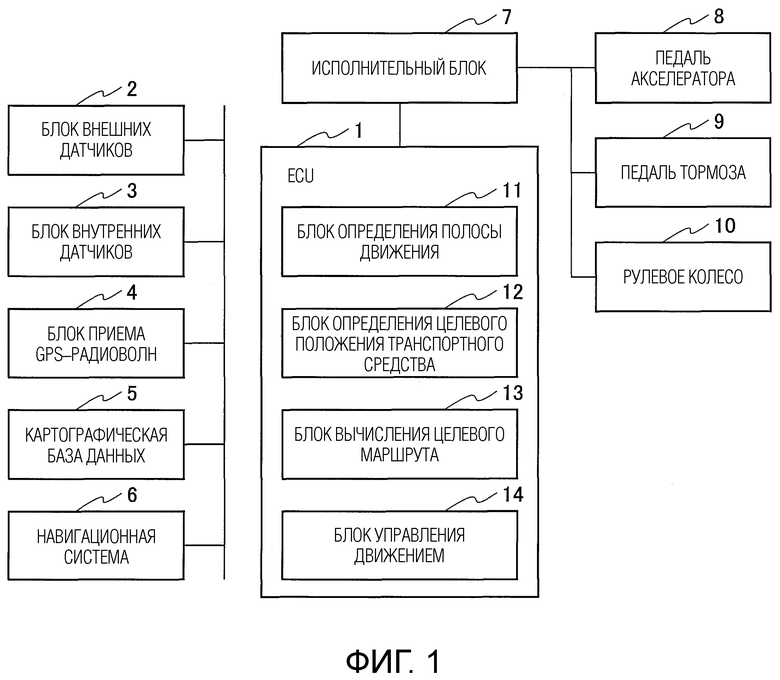
1. Способ управления движением транспортного средства для устройства управления движением транспортного средства, которое автоматически осуществляет руление транспортным средством, содержащий этапы, на которых:
определяют, въехало ли транспортное средство на полосу движения, на которой предусмотрен пункт взимания платы; и
после того, как определено, что транспортное средство въехало в упомянутую полосу движения, направляют транспортное средство в положение, смещенное от центра полосы движения к пункту взимания платы в направлении ширины полосы движения, к моменту, когда транспортное средство достигает пункта взимания платы.
2. Способ управления движением транспортного средства по п. 1, дополнительно содержащий этап, на котором:
останавливают транспортное средство в положении перед пунктом взимания платы в направлении движения транспортного средства.
3. Способ управления движением транспортного средства по п. 1 или 2, дополнительно содержащий этапы, на которых:
устанавливают целевое положение транспортного средства, в котором транспортное средство должно быть остановлено, в положение перед пунктом взимания платы в направлении движения транспортного средства;
вычисляют целевой маршрут от положения транспортного средства в момент, когда транспортное средство въезжает на полосу движения, к целевому положению транспортного средства; и
выполняют рулевое управление и управление тормозным усилием автоматически по целевому маршруту.
4. Способ управления движением транспортного средства по п. 3, в котором
транспортное средство, въезжающее на полосу движения, инициирует вычисление целевого маршрута.
5. Способ управления движением транспортного средства по п. 3, в котором
целевой маршрут вычисляется так, что транспортное средство движется в центре в направлении ширины полосы движения на полосе движения до того, как транспортное средство подъезжает к пункту взимания платы.
6. Способ управления движением транспортного средства по п. 5, в котором
транспортное средство движется в центре в направлении ширины полосы движения на полосе движения и, после того как транспортное средство замедляется, транспортное средство подъезжает к пункту взимания платы.
7. Способ управления движением транспортного средства по п. 1 или 2, дополнительно включающий в себя этап, на котором
уведомляют пользователя транспортного средства заранее о том, что транспортное средство собирается подъехать к пункту взимания платы.
8. Способ управления движением транспортного средства по п. 1 или 2, дополнительно включающий в себя этап, на котором
подсказывают, посредством звука или отображения, пользователю транспортного средства остановить транспортное средство в положении перед пунктом взимания платы.
9. Способ управления движением транспортного средства по п. 1 или 2, дополнительно включающий в себя этап, на котором
в случае, когда транспортное средство не собирается подъезжать к пункту взимания платы, уведомляют пользователя транспортного средства о том, что транспортное средство не собирается подъезжать к пункту взимания платы.
10. Способ управления движением транспортного средства по п. 1 или 2, дополнительно включающий в себя этап, на котором
определяют, является ли полоса движения полосой движения с ручными воротами или полосой движения с автоматическим пунктом сбора оплаты, причем
в случае, когда полоса движения является полосой движения с автоматическим пунктом сбора оплаты, транспортное средство движется в центре полосы движения с автоматическим пунктом сбора оплаты.
11. Устройство управления движением транспортного средства, которое содержит камеру, которая обнаруживает полосы движения, и исполнительный механизм, который автоматически осуществляет руление транспортным средством на основе информации о полосе движения, причем устройство содержит:
блок определения полосы движения, который определяет, въехало ли транспортное средство на полосу движения, на которой предусмотрен пункт взимания платы; и
блок управления движением, который после того, как определено, что транспортное средство въехало на упомянутую полосу движения, направляет транспортное средство в положение, смещенное от центра полосы движения к пункту взимания платы в направлении ширины полосы движения.
| JP 2013086580 A 13.05.2013 | |||
| JP 2017065454 A, 06.04.2017 | |||
| JP 2016222170 A, 28.12.2016. |

