ОБЛАСТЬ ТЕХНИКИ
[0001] Варианты реализации настоящего раскрытия в целом относятся к системам и способам компенсации порыва воздушной массы для воздушных летательных аппаратов и, в частности, к системам и способам, которые могут быть использованы для механического уменьшения воздействия порывов воздушной массы по отношению к воздушному летательному аппарату.
УРОВЕНЬ ТЕХНИКИ
[0002] Воздушные летательные аппараты часто сталкиваются с атмосферной турбулентностью, такой как быстрые перепады скорости и/или направления ветра от усредненного или среднего потока воздуха. Например, атмосферная турбулентность может включать в себя, помимо прочего, сдвиг ветра, градиенты ветра, турбулентность при ясном небе, турбулентность в спутном следе, воздушные ямы и т.п. Атмосферная турбулентность может включать в себя вертикальные и горизонтальные сдвиги ветра или порывы ветра. Вертикальный сдвиг или порывы ветра, как правило, возникают на более высоких высотах в атмосфере, а также выше или вблизи вертикальной поверхности, такой как гора. Горизонтальный сдвиг может возникать вблизи фронтов погоды или вблизи прибрежного района. По возможности пилоты стараются избегать летать в условиях турбулентности.
[0003] Во время полета коммерческий транспортный воздушный летательный аппарат часто работает в обычной крейсерской конфигурации, которая сводит к минимуму или иным образом снижает расход топлива. В обычной крейсерской конфигурации различные поверхности управления воздушного летательного аппарата могут находиться в убранном или таком другом положении, которое сводит к минимуму или иным образом снижает лобовое сопротивление. Тем не менее, крейсерская конфигурация не всегда может хорошо подходить для компенсации нагрузок на конструкцию крыльев и других поверхностей воздушного летательного аппарата, вызываемых порывами воздушной массы.
[0004] Аэродинамически эффективные конфигурации поверхностей управления не всегда могут хорошо подходить для работы с порывом воздушной массы. Воздушные летательные аппараты должны соответствовать критериям нагрузки от дискретных порывов воздушной массы, как определено Федеральным управлением гражданской авиации (FAA). По существу, когда воздушный летательный аппарат сталкивается с порывом воздушной массы, происходит отклонение одной или более поверхностей управления. Говоря кратко, некоторые конфигурации крыла являются предпочтительными для перераспределения нагрузки вследствие порыва воздушной массы. Таким образом, вместо увеличения веса конструкции воздушного летательного аппарата, которое обеспечивает достаточный запас прочности конструкции в отношении нагрузки вследствие порыва воздушной массы, может потребоваться меньшая конструкция, когда при этом выполняют изменение конфигурации поверхностей управления для компенсации нагрузки вследствие порыва воздушной массы. Тем не менее, хотя во время полета воздушный летательный аппарат с отклоненными поверхностями управления обладает конструктивной эффективностью по весу в отношении нагрузки вследствие порыва воздушной массы, такая конфигурация для работы в условиях порывов воздушной массы не является топливосберегающей, поскольку отклоненные поверхности вызывают сопротивление.
[0005] В целом, общая нагрузка на воздушный летательный аппарат включает в себя: "нагрузку 1g", которая представляет силы и моменты, обычно выдерживаемые при прямом полете на эшелоне без ускорений; нагрузку при выполнении маневра, которая является результатом временных вызываемых пилотом отклонений от прямого полета на эшелоне без ускорений; и нагрузку вследствие порыва воздушной массы, которая является результатом атмосферных возмущений.
[0006] Кроме того, воздушный летательный аппарат может включать в себя одну или более систем текущего контроля, которые обнаруживают порывы воздушной массы с целью облегчения нагрузки или демпфирования воздушных порывов. Например, коэффициент нагрузки может быть использован в качестве индикатора порыва воздушной массы, а также для изменения конфигурации поверхностей управления воздушного летательного аппарата. Тем не менее, такие сигналы не отличают преднамеренные маневры воздушного летательного аппарата от порывов воздушной массы. Кроме того, использование коэффициента нагрузки обычно требует, чтобы воздушный летательный аппарат вошел в условия порыва воздушной массы и среагировал на него, до того как поверхности управления окажутся в состоянии изменить конфигурацию. По существу, использование коэффициента нагрузки в качестве сигнала обратной связи не обеспечивает достаточного времени для оптимального изменения конфигурации поверхностей управления до наступления пиковой нагрузки.
[0007] Соответственно, существует потребность в системе и способе задания эффективной конфигурации летательного аппарата для компенсации порывов воздушной массы. Существует необходимость в системе и способе обеспечения противостояния порывам ветра, которые не увеличивают общий вес конструкции воздушного летательного аппарата.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0008] Некоторые варианты реализации настоящего раскрытия обеспечивают создание системы компенсации порыва воздушной массы, выполненной с возможностью адаптивного уменьшения нагрузки вследствие порыва воздушной массы, воздействующего на воздушный летательный аппарат. Система компенсации порыва воздушной массы может включать в себя подсистему датчиков, установленных на воздушном летательном аппарате. Подсистема датчиков выполнена с возможностью выдачи одного или более сигналов. Система компенсации порыва воздушной массы также может включать в себя подсистему сигналов порыва воздушной массы, выполненную с возможностью приема указанного сигнала (указанных сигналов) от подсистемы датчиков и выработки сигнала порыва воздушной массы на основе анализа указанного сигнала (указанных сигналов). Подсистема оценки порыва воздушной массы выполнена с возможностью выдачи сигнала порыва воздушной массы для перемещения поверхностей управления в ответ на сигнал оценки порыва воздушной массы. По меньшей мере в одном варианте реализации изобретения подсистема датчиков может включать в себя первый датчик, размещенный возле передней части воздушного летательного аппарата, причем первый датчик выполнен с возможностью выдачи первого сигнала, и второй датчик, выполненный с возможностью выдачи второго сигнала. Подсистема сигналов порыва воздушной массы выполнена с возможностью приема первого и второго сигналов и выработки сигнала порыва воздушной массы на основе анализа первого и второго сигналов.
[0009] Некоторые варианты реализации настоящего раскрытия обеспечивают создание системы компенсации порыва воздушной массы, выполненной с возможностью адаптивного уменьшения нагрузки вследствие порыва воздушной массы, воздействующего на воздушный летательный аппарат. Система компенсации порыва воздушной массы может включать в себя первый датчик, размещенный возле передней части воздушного летательного аппарата. Первый датчик выполнен с возможностью выдачи первого сигнала. Второй датчик выполнен с возможностью выдачи второго сигнала. Второй датчик может использовать чувствительный механизм, который отличается от чувствительного механизма первого датчика. Подсистема сигналов порыва воздушной массы выполнена с возможностью приема первого и второго сигналов и выработки сигнала порыва воздушной массы на основе анализа первого и второго сигналов. Подсистема сигналов порыва воздушной массы может быть выполнена с возможностью выдачи сигнала порыва воздушной массы для перемещения поверхностей управления в ответ на сигнал порыва воздушной массы. По меньшей мере в одном варианте реализации изобретения различные датчики, такие как датчик упреждения или трубки для измерения давления, могут подавать сигналы в подсистему сигналов порыва воздушной массы. По меньшей мере еще в одном варианте реализации изобретения вместо двух датчиков может быть использован один датчик в сочетании с подсистемой сигналов порыва воздушной массы.
[0010] Некоторые варианты реализации настоящего раскрытия обеспечивают создание системы компенсации порыва воздушной массы, которая выполнена с возможностью адаптивного уменьшения нагрузки вследствие порыва воздушной массы, воздействующего на воздушный летательный аппарат. Система компенсации порыва воздушной массы может включать в себя первый датчик, размещенный возле передней части воздушного летательного аппарата. Первый датчик выполнен с возможностью выдачи первого сигнала. Второй датчик может быть расположен на удалении от передней части воздушного летательного аппарата (то есть, второй датчик находится дальше от передней части воздушного летательного аппарата, чем второй датчик). Второй датчик выполнен с возможностью выдачи второго сигнала. Подсистема сигналов порыва воздушной массы может быть выполнена с возможностью приема первого и второго сигналов и выработки сигнала порыва воздушной массы на основе анализа первого и второго сигналов. Подсистема сигналов порыва воздушной массы может выдавать сигнал порыва воздушной массы для изменения сигнала параметра нагрузки (такого как сигнал нормального ускорения, сигнал угла атаки, сигнал нагрузки, сигнал давления, сигнал подъема и т.п.) в ответ на сигнал порыва воздушной массы, превышающий порог демпфирования.
[0011] Сигнал параметра нагрузки, измененный сигналом порыва воздушной массы, может заставить поверхности управления воздушного летательного аппарата изменить нормальную конфигурацию на конфигурацию уменьшения нагрузки вследствие порыва воздушной массы. По меньшей мере в одном варианте реализации изобретения система может включать в себя подсистему демпфирования воздушных порывов (LA), функционально соединенную с одной или более поверхностями управления воздушного летательного аппарата. Подсистема LA демпфирования воздушных порывов может быть выполнена с возможностью обнаружения или выработки сигнала параметра нагрузки. Подсистема LA демпфирования воздушных порывов выполнена с возможностью сохранения поверхности (поверхностей) управления в нормальной конфигурации (которые все еще могут быть применимы к измененной конфигурации, используемой для перемещения нагрузок при выполнении маневра, например), когда сигнал параметра нагрузки не изменен сигналом порыва воздушной массы. Например, сигнал нормального ускорения, например, не измененный сигналом порыва воздушной массы, может заставить поверхности управления совершить переход в конфигурацию демпфирования для нагрузок при выполнении маневра. Подсистема LA демпфирования воздушных порывов выполнена с возможностью перемещения поверхности (поверхностей) управления в конфигурацию уменьшения нагрузки вследствие порыва воздушной массы в ответ на изменение сигнала параметра нагрузки сигналом порыва воздушной массы.
[0012] По меньшей мере в одном варианте реализации изобретения первый датчик может представлять собой флюгерный датчик, который выполнен с возможностью выдачи первого сигнала в качестве сигнала угла атаки от флюгерного датчика. Второй датчик может быть инерциальным датчиком, который выполнен с возможностью выдачи второго сигнала, такого как инерционный сигнал угла атаки. Флюгерный датчик может быть размещен возле носовой части воздушного летательного аппарата. Инерциальный датчик может быть размещен на крыле или в крыле воздушного летательного аппарата или в других различных местах. По меньшей мере в одном варианте реализации изобретения один или оба из первого и второго датчиков могут включать в себя акселерометр.
[0013] Порог демпфирования может включать в себя величину нагрузки, которая превышает нагрузку на крыло воздушного летательного аппарата, вызванную преднамеренным маневрированием воздушного летательного аппарата. Например, величина нагрузки может быть больше, чем значение силы, действующей на поверхность крыла, которая вызвана преднамеренным маневром воздушного летательного аппарата (например, вызванным пилотом). По меньшей мере еще в одном варианте реализации изобретения поверхности управления могут перемещаться пропорционально в зависимости от превышения порога демпфирования.
[0014] Подсистема сигналов порыва воздушной массы может включать в себя по меньшей мере один блок управления, функционально соединенный по меньшей мере с одним запоминающим устройством. В качестве примера, подсистема сигналов порыва воздушной массы может быть выполнена с возможностью выработки сигнала порыва воздушной массы согласно следующему выражению:

где
α_gust является сигналом порыва воздушной массы,
θ является углом тангажа воздушного летательного аппарата,
β является углом бокового скольжения воздушного летательного аппарата,
Ф является углом крена воздушного летательного аппарата,
q является угловой скоростью тангажа воздушного летательного аппарата,
VS является вертикальной скоростью воздушного летательного аппарата,
TAS является истинной воздушной скоростью воздушного летательного аппарата,
и
α_air является углом атаки для флюгерного датчика.
[0015] Некоторые варианты реализации настоящего раскрытия обеспечивают создание способа компенсации порыва воздушной массы, обеспечивающего возможность адаптивного уменьшения нагрузки вследствие порыва воздушной массы, воздействующего на воздушный летательный аппарат. Способ компенсации порыва воздушной массы может включать в себя обнаружение по меньшей мере одного параметра (такого как угол атаки) воздушного летательного аппарата с помощью первого датчика, размещенного возле передней части воздушного летательного аппарата, выдачу первого сигнала на основе параметра (параметров) от первого датчика, обнаружение параметра (параметров) воздушного летательного аппарата с помощью второго датчика, который расположен на удалении от передней части воздушного летательного аппарата, выдачу второго сигнала на основе параметра (параметров) от второго датчика, использование подсистемы сигналов порыва воздушной массы для выработки сигнала порыва воздушной массы на основе анализа первого и второго сигналов, сравнение сигнала порыва воздушной массы с порогом демпфирования и изменение сигнала параметра нагрузки с помощью сигнала порыва воздушной массы в ответ на сигнал порыва воздушной массы, превышающий порог демпфирования.
[0016] Некоторые варианты реализации настоящего раскрытия обеспечивают создание воздушного летательного аппарата, который может включать в себя фюзеляж, включающий в себя внутренний салон, имеющий кабину экипажа, первое и второе крылья, проходящие от фюзеляжа, по меньшей мере один вертикальный стабилизатор, по меньшей мере один горизонтальный стабилизатор, одну или более поверхностей управления, прикрепленных с возможностью перемещения к одному или более из следующего: первое и второе крылья, вертикальный стабилизатор (вертикальные стабилизаторы) и горизонтальный стабилизатор (горизонтальные стабилизаторы), а также систему компенсации порыва воздушной массы, выполненную с возможностью адаптивного уменьшения нагрузки вследствие порыва воздушной массы, воздействующего на воздушный летательный аппарат. Система компенсации порыва воздушной массы может включать в себя первый датчик, закрепленный возле кабины экипажа. Первый датчик выполнен с возможностью выдачи первого сигнала. Второй датчик может быть расположен на удалении от кабины экипажа. Второй датчик выполнен с возможностью выдачи второго сигнала. Подсистема сигналов порыва воздушной массы выполнена с возможностью приема первого и второго сигналов и выработки сигнала порыва воздушной массы на основе анализа первого и второго сигналов. Подсистема сигналов порыва воздушной массы выполнена с возможностью выдачи сигнала порыва воздушной массы для изменения сигнала параметра нагрузки в ответ на сигнал порыва воздушной массы, превышающий порог демпфирования. Подсистема демпфирования воздушных порывов (LA) может быть функционально соединена с поверхностью (поверхностями) управления. Подсистема LA демпфирования воздушных порывов выполнена с возможностью обнаружения сигнала параметра нагрузки. Подсистема LA демпфирования воздушных порывов выполнена с возможностью сохранения поверхности (поверхностей) управления в нормальной конфигурации, когда сигнал параметра нагрузки не изменен сигналом порыва воздушной массы. Подсистема LA демпфирования воздушных порывов выполнена с возможностью перемещения поверхности (поверхностей) управления в конфигурацию уменьшения нагрузки вследствие порыва воздушной массы в ответ на изменение сигнала параметра нагрузки сигналом порыва воздушной массы.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0017] На ФИГ. 1 показан перспективный вид сверху воздушного летательного аппарата согласно варианту реализации настоящего раскрытия.
[0018] На ФИГ. 2 показана блок-схема системы компенсации порыва воздушной массы согласно варианту реализации настоящего раскрытия.
[0019] На ФИГ. 3 показана блок-схема системы компенсации порыва воздушной массы согласно варианту реализации настоящего раскрытия.
[0020] На ФИГ. 4 показана блок-схема последовательности этапов способа компенсации порыва воздушной массы для воздушного летательного аппарата согласно варианту реализации настоящего раскрытия.
[0021] На ФИГ. 5 показан перспективный вид спереди воздушного летательного аппарата согласно варианту реализации настоящего раскрытия.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[0022] Предшествующий раздел описания "Раскрытие изобретения", а также последующий раздел "Осуществление изобретения" с подробным описанием некоторых вариантов реализации изобретения будут лучше поняты при прочтении совместно с прилагаемыми чертежами. При использовании в настоящем документе элемент или этап, который представлен в единственном числе и которому предшествует слово "а" или "an" (неопределенный артикль английского языка), следует понимать как не обязательно исключающий множественное число этих элементов или этапов. Кроме того, ссылки на "один вариант реализации изобретения" не предназначены для истолкования как исключающие существование дополнительных вариантов реализации изобретения, которые также включают перечисленные признаки. Более того, если явно не указано обратное, варианты реализации изобретения "содержащие " или "имеющие" элемент или множество элементов, имеющих определенное свойство, могут включать в себя дополнительные элементы, не обладающие этим свойством.
[0023] Некоторые варианты реализации настоящего раскрытия обеспечивают создание систем и способов быстрого и точного определения порыва ветра или нагрузки вследствие порыва ветра на крыло воздушного летательного аппарата. Системы и способы обеспечивают быстрое срабатывание в случае, если порыв ветра является достаточным, чтобы потребовалось отклонение различных поверхностей управления крыла. Системы и способы также обеспечивают возможность отличить порыв ветра от маневра, инициированного пилотом. Предоставление этой информации быстрее, чем это обеспечивается известными системами и способами, уменьшает нагрузку вследствие порыва воздушной массы на крылья и, следовательно, количественно уменьшает конструкцию, используемую в настоящее время для обеспечения соответствия нормативным требованиям Федерального управления гражданской авиации (FAA). Уменьшение общей конструкции воздушного летательного аппарата приводит к уменьшению веса воздушного летательного аппарата и увеличению топливной эффективности.
[0024] Различные воздушные летательные аппараты включают в себя инерциальные датчики, такие как акселерометры, которые могут быть установлены на крыльях, например. Инерциальные датчики используются для обнаружения возникновения порыва воздушной массы. Нагрузка на крылья может быть уменьшена, например, посредством отклонения участков поверхностей крыльев до того, как полная нагрузка вследствие порыва ветра окажет воздействие на крылья. Соответственно, данные могут быть получены от одного или более флюгерных датчиков угла атаки, размещенных в передней части воздушного летательного аппарата, для облегчения обнаружения порыва ветра. При обнаружении порыва воздушной массы, например, с помощью информации, полученной от флюгерного датчика (флюгерных датчиков) угла атаки и/или инерциальных датчиков, варианты реализации настоящего раскрытия обеспечивают возможность анализа указанной информации, и отклоняют крылья раньше (по сравнению с известными способами) для уменьшения нагрузки, действующей на крылья. Таким образом, предполагается, что конструктивный вес воздушного летательного аппарата может быть уменьшен, благодаря чему уменьшается расход топлива при одновременном соблюдении требований безопасности, предъявляемых Федеральным управлением гражданской авиации (FAA) в отношении порывов ветра.
[0025] Некоторые варианты реализации настоящего раскрытия обеспечивают создание способа оценки порывов ветра, который может включать в себя прием по меньшей мере одного входного сигнала по меньшей мере от одного флюгерного датчика угла атаки, прием по меньшей мере одного входного сигнала от одного или более инерциальных датчиков (таких как один или более акселерометров), расположенных далее по потоку относительно флюгерного датчика (флюгерных датчиков) угла атаки, расчет величины порыва ветра с использованием полученных данных, и отклонение по меньшей мере участка крыла воздушного летательного аппарата на основе рассчитанной величины. По меньшей мере в одном варианте реализации изобретения флюгерный датчик угла атаки может быть размещен возле носовой части воздушного летательного аппарата. Инерциальный датчик (инерциальные датчики) может (могут) быть установлен(ы) на крыле воздушного летательного аппарата или расположен(ы) в других местах.
[0026] Некоторые варианты реализации настоящего раскрытия обеспечивают создание способа различения порыва ветра и маневра, совершаемого пилотом. Способ может включать в себя прием на компьютере входных сигналов, поступающих от пилота, прием на указанном компьютере входных сигналов по меньшей мере от одного датчика и по меньшей мере одного флюгерного датчика угла атаки, определение, приписывается ли нагрузка на крыло воздушного летательного аппарата команде, поступающей от пилота, или порыву ветра, и отклонение по меньшей мере участка крыла воздушного летательного аппарата, если ожидается, что нагрузка на крыло будет иметь место вследствие этого порыва ветра.
[0027] Некоторые варианты реализации настоящего раскрытия обеспечивают создание систем и способов, которые обеспечивают возможность уменьшения нагрузок на конструкцию воздушного летательного аппарата, вызванных дискретными порывами воздушной массы. Например, некоторые варианты реализации настоящего раскрытия могут обеспечить создание системы обнаружения порывов воздушной массы, основанной на угле атаки и других параметрах воздуха и базы инерционных данных, и подсистемы отклонения поверхностей управления, выполненной для обеспечения уменьшения конструктивных нагрузок.
[0028] Некоторые варианты реализации настоящего раскрытия обеспечивают создание системы компенсации порыва воздушной массы и способа, которые обеспечивают возможность оценки порыва воздушной массы путем сравнения угла атаки для флюгерного датчика с углом атаки (который может быть определен как разностный угол между положением по тангажу и траекторией полета на основе движения воздушного летательного аппарата в целом). В различных воздушных летательных аппаратах на общее движение влияет воздушный поток поверх плоскостей крыльев и хвостового оперения. Флюгерный датчик имеет относительно низкую инерцию. Таким образом, флюгерный датчик может мгновенно реагировать на изменения локального воздушного потока. Кроме того, флюгерный датчик обычно размещен в носовой части воздушного летательного аппарата, благодаря чему обеспечивается хорошая возможность восприятия порыва воздушной массы, прежде чем в него попадает крыло и хвостовое оперение. Когда угол атаки от флюгерного датчика и инерционный угол атаки значительно отличаются, эта разница указывает на аэродинамическое возмущение, которое еще не оказывает влияния на движение воздушного летательного аппарата. Иными словами, варианты реализации настоящего раскрытия могут быть выполнены для обнаружения порыва воздушной массы до того, как произойдет встреча с ним в полном объеме.
[0029] В вариантах реализации настоящего раскрытия могут быть использованы различные датчики других типов для обнаружения порыва воздушной массы. Например, могут быть использованы датчики ЛИДАР, выполненные по технологии светового обнаружения и определения дальности (LIDAR), датчики перепада давления и т.п.
[0030] Варианты реализации настоящего раскрытия обеспечивают создание систем и способов, которые могут обеспечивать возможность обнаружения порыва воздушной массы, превышающего определенный порог. Например, изменение конфигурации поверхности крыльев может подходить для порывов воздушной массы выше определенного порогового значения. Пороги обнаружения могут быть настроены для максимального использования топливосберегающей конфигурации аэродинамически чистого крыла при сохранении достигнутого улучшения в отношении нагрузок на конструкцию в ситуациях, когда оно благоприятно сказывается на весе конструкции.
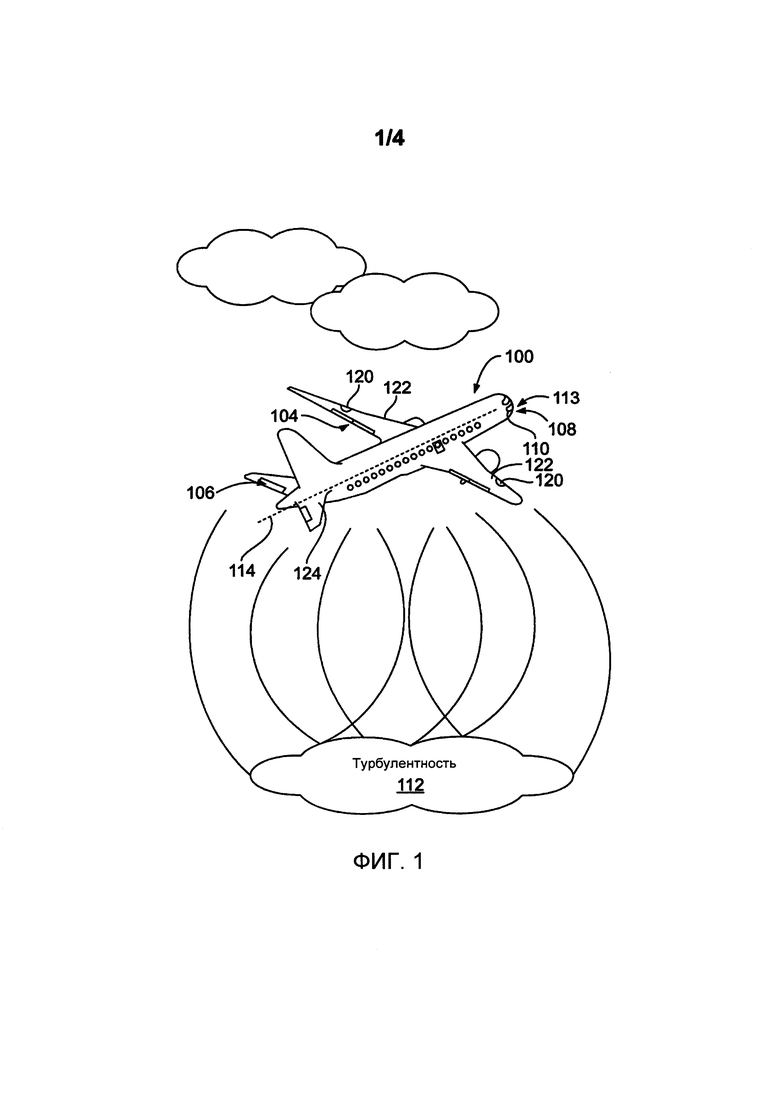
[0031] На ФИГ. 1 показан перспективный вид сверху воздушного летательного аппарата 100 согласно варианту реализации настоящего раскрытия. Воздушный летательный аппарат 100 может включать в себя поверхности управления такие как, помимо прочего, флапероны или элероны 104, руль 106 высоты, переднее горизонтальное оперение 108, интерцепторы и т.п. Поверхности управления, создающие подъемную силу, (такие как флапероны или элероны 104) могут представлять собой поверхности управления, шарнирно прикрепленные к задней кромке крыла воздушного летательного аппарата с неподвижным крылом. Флапероны или элероны 104 могут управлять креном (величиной поворота вокруг продольной оси) воздушного летательного аппарата 100. По меньшей мере в одном варианте реализации изобретения флапероны 104 на каждом крыле могут быть опущены вместе, чтобы работать так, как работает предназначенный для этого набор закрылков. В других вариантах реализации изобретения элероны 104 на каждом крыле могут быть задействованы по-разному, например с одним опущенным элероном и другим поднятым элероном для управления креном воздушного летательного аппарата 100.
[0032] Руль 106 высоты и переднее горизонтальное оперение 108 могут быть использованы для управления движением по тангажу воздушного летательного аппарата 100 и известны в качестве поверхностей управления тангажом. Руль 106 высоты может быть размещен в задней части воздушного летательного аппарата и помогает управлению вертикальным перемещением воздушного летательного аппарата 100. Может быть выполнено два руля 106 высоты, каждый из которых закреплен с каждой стороны фюзеляжа. Кроме того, руль 106 высоты управляет положением носовой части воздушного летательного аппарата 100 и углом атаки крыла. Переднее горизонтальное оперение 108 установлено на передней части воздушного летательного аппарата 100 и работает наподобие руля 106 высоты.
[0033] Как раскрыто ниже, воздушный летательный аппарат 100 может включать в себя систему компенсации порыва воздушной массы, которая может представлять собой систему управления эксплуатируемого воздушного летательного аппарата, выполненную с возможностью уменьшения реагирования воздушного летательного аппарата на турбулентность 112. Выражение "турбулентность" может быть взаимозаменяемым с выражением "порыв ветра". Система управления эксплуатируемого воздушного летательного аппарата может быть быстро приведена в действие при возникновении турбулентности 112 во время полета. Например, прогнозы погоды могут быть неточными, существующее предупреждение от радара может не сообщать об обнаруженной турбулентности, пока нет присутствия влаги, и время или возможность для уклонения воздушного летательного аппарата 100 от полета в турбулентности 112 могут быть упущены. При восприятии турбулентности 112 система компенсации порыва воздушной массы может работать совместно с множеством других устройств, которые могут быть использованы для восприятия и измерения турбулентности, выработки команды средствам управления полетом воздушного летательного аппарата и/или приведения в движение поверхностей непосредственного управления подъемной силой и поверхностей управления тангажом.
[0034] Воздушный летательный аппарат 100 может включать в себя флюгерный датчик 110, который может быть выполнен возле носовой части 113 воздушного летательного аппарата 100. Флюгерный датчик 110 может быть выполнен в качестве датчика угла атаки и использоваться для измерения угла локального воздушного потока по отношению к продольной базовой плоскости 114 воздушного летательного аппарата 100.
[0035] Воздушный летательный аппарат 100 также может включать в себя один или более инерциальных датчиков 120. Например, инерциальные датчики 120 могут представлять собой или включать в себя акселерометры. Инерциальные датчики 120 могут быть установлены на крыльях 122 воздушного летательного аппарата 100. По существу, инерциальные датчики 120 могут быть выполнены с возможностью обнаружения угла атаки крыльев 122, к которым они прикреплены.
[0036] Как показано на чертежах, флюгерный датчик 110 может быть размещен спереди по потоку (а именно, в месте, на которое воздушный поток воздействует раньше) относительно инерциальных датчиков 120. Флюгерный датчик 110 может быть размещен в таком месте воздушного летательного аппарата 100, которое находится ближе к носовой части 113, чем инерциальные датчики 120. Таким образом, флюгерный датчик 110 может встречать порыв воздушной массы раньше инерциальных датчиков 120.
[0037] Дополнительно воздушный летательный аппарат 100 может включать в себя дополнительные флюгерные датчики или другие датчики, выполненные спереди по потоку от крыльев. Кроме того, воздушный летательный аппарат 100 может включать в себя больше или меньше инерциальных датчиков 120, чем показано. Кроме того, инерциальные датчики 120 могут быть размещены в различных других областях воздушного летательного аппарата 100. Например, инерциальные датчики 120 могут быть размещены спереди по потоку относительно крыльев, но дальше по потоку (например, расположены на удалении от носовой части 113) относительно флюгерного датчика 110. По меньшей мере в одном варианте реализации изобретения один или большее количество инерциальных датчиков 120 могут быть установлены в хвостовой части 124 воздушного летательного аппарата 100.
[0038] В процессе эксплуатации воздушный сигнал, такой как сигнал угла атаки от флюгерного датчика, выдают первым датчиком, таким как флюгерный датчик 110, и принимают блоком управления (не показано на ФИГ. 1) системы компенсации порыва воздушной массы. Аналогично, один или большее количество инерционных сигналов, таких как инерционные сигналы угла атаки, выдают одним или большим количеством вторых датчиков, таким как инерциальные датчики 120, и принимают блоком управления. Блок управления затем анализирует воздушный сигнал и инерционный сигнал для определения наличия порыва воздушной массы, как описано ниже.
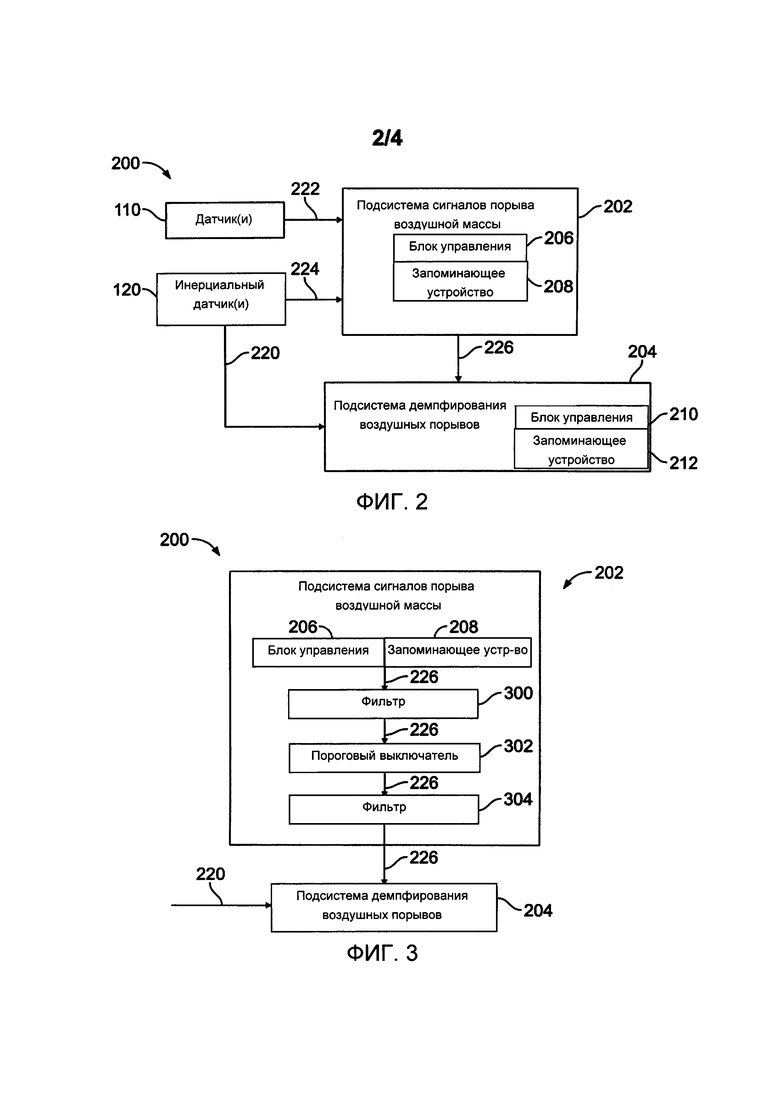
[0039] На ФИГ. 2 показана блок-схема системы 200 компенсации порыва воздушной массы согласно варианту реализации настоящего раскрытия. Система 200 компенсации порыва воздушной массы может включать в себя подсистему 202 сигналов порыва воздушной массы, имеющую сигнальное сообщение с флюгерным датчиком 110 и инерциальным датчиком (инерциальными датчиками) 120 с помощью одного или более средств проводной или беспроводной связи. Вместо флюгерного датчика датчик(и) 110 могут быть датчиками других различных типов. Например, датчик(и) 110 может (могут) представлять собой или включать в себя одно или более из следующего: датчик упреждения, трубка для измерения давления, установленная на крыле или корпусе, реактивный датчик (такой как акселерометр) и/или т.п. Подсистема 202 сигналов порыва воздушной массы, в свою очередь, может быть функционально соединена с (например, с помощью одного или более средств проводной или беспроводной связи) подсистемой 204 демпфирования воздушных порывов (LA). Подсистема LA 204 демпфирования воздушных порывов может быть использована для демпфирования нагрузок, связанных с маневрированием воздушного летательного аппарата при полете с перегрузкой 1g и порывами воздушной массы. Подсистема LA 204 демпфирования воздушных порывов может включать в себя систему демпфирования воздушных порывов при выполнении маневра, имеющую систему подавления вертикального порыва воздушной массы (VGS), такую, как описано в патенте США №8,774,987, озаглавленном "Vertical Gust Suppression System for Transport Aircraft" (Система подавления вертикального порыва воздушной массы для транспортного воздушного летательного аппарата), который полностью включен в настоящий документ посредством ссылки.
[0040] Подсистема 202 сигналов порыва воздушной массы может включать в себя блок 206 управления и запоминающее устройство 208. По меньшей мере в одном варианте реализации изобретения блок 206 управления может включать в себя запоминающее устройство 208 или наоборот. Дополнительно, блок 206 управления может быть выполнен отдельно и обособлено от запоминающего устройства 208. Аналогично, подсистема LA 204 демпфирования воздушных порывов может включать в себя блок 210 управления и запоминающее устройство 212. По меньшей мере в одном варианте реализации изобретения блок 210 управления может включать в себя запоминающее устройство 212 или наоборот. Дополнительно, блок 210 управления может быть выполнен отдельно и обособлено от запоминающего устройства 212. В альтернативном варианте реализации изобретения один блок управления и запоминающее устройство могут быть использованы в отношении подсистемы 202 сигналов порыва воздушной массы и подсистемы LA 204 демпфирования воздушных порывов. Например, система 200 компенсации порыва воздушной массы может включать в себя один блок управления и/или запоминающее устройство, которое используют для управления работой средств оценки порывов воздушной массы и демпфирования воздушных порывов.
[0041] В процессе эксплуатации подсистема LA 204 демпфирования воздушных порывов может принимать сигнал 220 параметра нагрузки от инерциального датчика (инерциальных датчиков) 120. Сигнал 220 параметра нагрузки может представлять собой или включать в себя одно или более из следующего: инерционный сигнал 224 угла атаки, показатель нагрузки (как предполагаемой, так и измеренной или прогнозируемой), показатель подъемной силы (как предполагаемой, так и измеренной или прогнозируемой), показатель давления, сигнал угла бокового скольжения, сигнал поперечного ускорения или т.п., которые выдают в подсистему 202 сигналов порыва воздушной массы. Сигнал 220 параметра нагрузки может включать в себя сигнал нормального ускорения, который относится к ускорению воздушного летательного аппарата, рассматриваемого по нормали к длине плоскости, например, к центральной продольной плоскости 114 воздушного летательного аппарата 100 (показано на ФИГ. 1). Нормальное ускорение может быть перпендикулярным длине воздушного летательного аппарата 100 (например, направленный вверх порыв ветра, который воздействует на нижние поверхности крыльев, или направленный вбок порыв ветра, который воздействует на фюзеляж и вертикальный стабилизатор). На основе сигнала 220 параметра нагрузки блок 210 управления может определять порыв воздушной массы, воздействующий на области воздушного летательного аппарата, в которых размещен(ы) инерциальный датчик (инерциальные датчики) 120. Блок 210 управления может изменять конфигурацию поверхностей управления воздушного летательного аппарата (таких как элероны, флапероны, рули высоты, переднее горизонтальное оперение, интерцепторы и т.п.) на основе анализа сигнала 220 параметра нагрузки. Например, сигнал 220 параметра нагрузки может представлять силу порыва воздушной массы, действующую по нормали к поверхностям крыла, на которых размещен(ы) инерциальный датчик (инерциальные датчики) 120. Посредством анализирования сигнала 220 параметра нагрузки блок 210 управления может определять порыв воздушной массы. Инструкции для работы подсистемы LA 204 демпфирования воздушных порывов могут быть сохранены в запоминающем устройстве 212.
[0042] Следует отметить, что сигнал 220 параметра нагрузки зависит от силы порыва воздушной массы, воздействующего на крылья, например. По существу, конфигурация поверхностей управления крыльев может быть изменена подсистемой LA демпфирования воздушных порывов посредством анализа сигнала 220 параметра нагрузки в ответ на воздействие порыва воздушной массы на крылья. Однако может присутствовать временная задержка между временем первоначального обнаружения порыва воздушной массы посредством сигнала 220 параметра нагрузки и временем последующего изменения конфигурации поверхностей управления. Подсистему 202 сигналов порыва воздушной массы используют для оценки, измерения или прогнозирования порыва воздушной массы до того, как он окажет воздействие на крылья, с тем чтобы изменять конфигурацию поверхностей управления перед воздействием порыва воздушной массы на (и/или перед воздействием пиковой нагрузки на) крылья, например.
[0043] Подсистема 202 сигналов порыва воздушной массы принимает воздушный сигнал (например, сигнал 222 угла атаки от флюгерного датчика) от первого датчика, такого как флюгерный датчик 110, и инерционный сигнал (такой как инерционный сигнал 224 угла атаки) от инерциального датчика (инерциальных датчиков) 120. Хотя первый датчик показан в качестве флюгерного датчика 110, следует отметить, что первый датчик также может представлять собой датчик любых других типов. Блок 206 управления сравнивает сигнал 222 угла атаки от флюгерного датчика с инерционным сигналом 224 угла атаки. Если сигнал 222 угла атаки от флюгерного датчика и инерционный сигнал 224 угла атаки равны или находятся в пределах определенного диапазона, блок 206 управления может воздерживаться от выдачи сигнала порыва воздушной массы в подсистему LA 204 демпфирования воздушных порывов. Если, однако, сигнал 222 угла атаки от флюгерного датчика отличается от инерционного сигнала угла атаки (например, разница больше определенных пределов диапазона), тогда подсистема 202 сигналов порыва воздушной массы может выдавать сигнал 226 порыва воздушной массы в подсистему LA 204 демпфирования воздушных порывов, которая может затем изменять конфигурацию поверхности управления воздушного летательного аппарата на основе сигнала 226 порыва воздушной массы. По меньшей мере в одном варианте реализации изобретения сигнал 226 порыва воздушной массы может быть использован для изменения сигнала 220 параметра нагрузки, который используется подсистемой LA 204 демпфирования воздушных порывов, чтобы привести одну или более поверхностей управления воздушного летательного аппарата из нормальной конфигурации в конфигурацию уменьшения нагрузки вследствие порыва воздушной массы.
[0044] По меньшей мере в одном варианте реализации изобретения подсистема 202 сигналов порыва воздушной массы может анализировать принятые сигналы от первого датчика, такого как флюгерный датчик 110, и второго датчика, такого как по меньшей мере один из инерциальных датчиков 120. Подсистема 202 сигналов порыва воздушной массы может определять сигнал 226 порыва воздушной массы посредством одного или более из следующего: угол тангажа или положение по тангажу, вертикальная скорость, истинная воздушная скорость, угол или положение крена, угловая скоростью тангажа, угол бокового скольжения, угол атаки для флюгерного датчика и/или т.п. В качестве примера, блок 206 управления подсистемы 202 сигналов порыва воздушной массы может определять сигнал 226 порыва воздушной массы согласно следующему выражению:

где
α_gust является сигналом 226 порыва воздушной массы,
θ является углом тангажа в градусах,
β является углом бокового скольжения в градусах,
Ф является углом крена в градусах,
q является угловой скоростью тангажа в градусах в секунду,
VS является вертикальной скоростью в футах в секунду,
TAS является истинной воздушной скоростью в футах в секунду, и
α_air является углом атаки для флюгерного датчика.
В альтернативном варианте реализации изобретения блок 206 управления может определять сигнал 226 порыва воздушной массы с помощью других формул и/или способов.
[0045] Флюгерный датчик реагирует на порыв воздушной массы раньше инерциальных датчиков, поскольку угол атаки изменяется мгновенно, а инерциальные датчики ждут, пока разовьется подъемная сила крыла. По существу, сигнал 226 порыва воздушной массы может быть определен быстрее, чем сигнал 220 параметра нагрузки. Следовательно, сигнал 226 порыва воздушной массы обеспечивает для подсистемы LA 204 демпфирования воздушных порывов возможность изменять конфигурацию поверхностей управления воздушного летательного аппарата до того, как крылья, например, или другие области, на которых или в которых размещены инерциальные датчики 120, испытывают воздействие порыва воздушной массы. Таким образом, конфигурация поверхностей управления может быть изменена на конфигурацию уменьшения нагрузки вследствие порыва воздушной массы перед воздействием пиковой нагрузки вследствие порыва воздушной массы на крылья, например. Инструкции для работы подсистемы 202 сигналов порыва воздушной массы могут быть сохранены в запоминающем устройстве 208.
[0046] Как отмечено, флюгерный датчик 110 обеспечивает первый датчик, который выполнен с возможностью выдачи первого сигнала, а каждый инерциальный датчик 120 обеспечивает второй датчик, который выполнен с возможностью выдачи второго сигнала. Первый и второй сигналы подвергают анализу для определения сигнала порыва воздушной массы. Например, второй сигнал может вычитаться из первого сигнала для определения разницы, которая может быть использована в качестве первоначального сигнала порыва воздушной массы.
[0047] В альтернативном варианте реализации изобретения вместо флюгерного датчика 110, первый датчик может представлять собой датчик любых других типов, которые могут быть использованы для определения воздушного сигнала, такого как сигнал угла атаки. Например, первый датчик может представлять собой акселерометр, датчик ЛИДАР, датчик перепада давления и/или т.п., который может быть размещен спереди по потоку относительно второго датчика, который может быть инерциальным датчиком, таким как дополнительный акселерометр. По меньшей мере еще в одном варианте реализации изобретения указанная система может включать в себя больше или меньше датчиков, чем показано. Например, система 200 может включать в себя один датчик, соединенный с подсистемой 202 устройства оценки порыва воздушной массы и подсистемой LA 204 демпфирования воздушных порывов.
[0048] Как отмечено, подсистема 202 сигналов порыва воздушной массы анализирует сигналы угла атаки, выдаваемые посредством флюгерного датчика 110 и инерциального датчика (инерциальных датчиков) 120. Дополнительно, подсистема 202 сигналов порыва воздушной массы может анализировать различные параметры воздушного летательного аппарата, отличающиеся от угла атаки. Например, датчики могут быть датчиками давления, а подсистема 202 сигналов порыва воздушной массы может быть выполнена с возможностью анализирования сигналов давления воздуха. По меньшей мере еще в одном варианте реализации изобретения датчики могут быть датчиками воздушной скорости, а подсистема 202 сигналов порыва воздушной массы может быть выполнена с возможностью анализирования сигналов воздушной скорости.
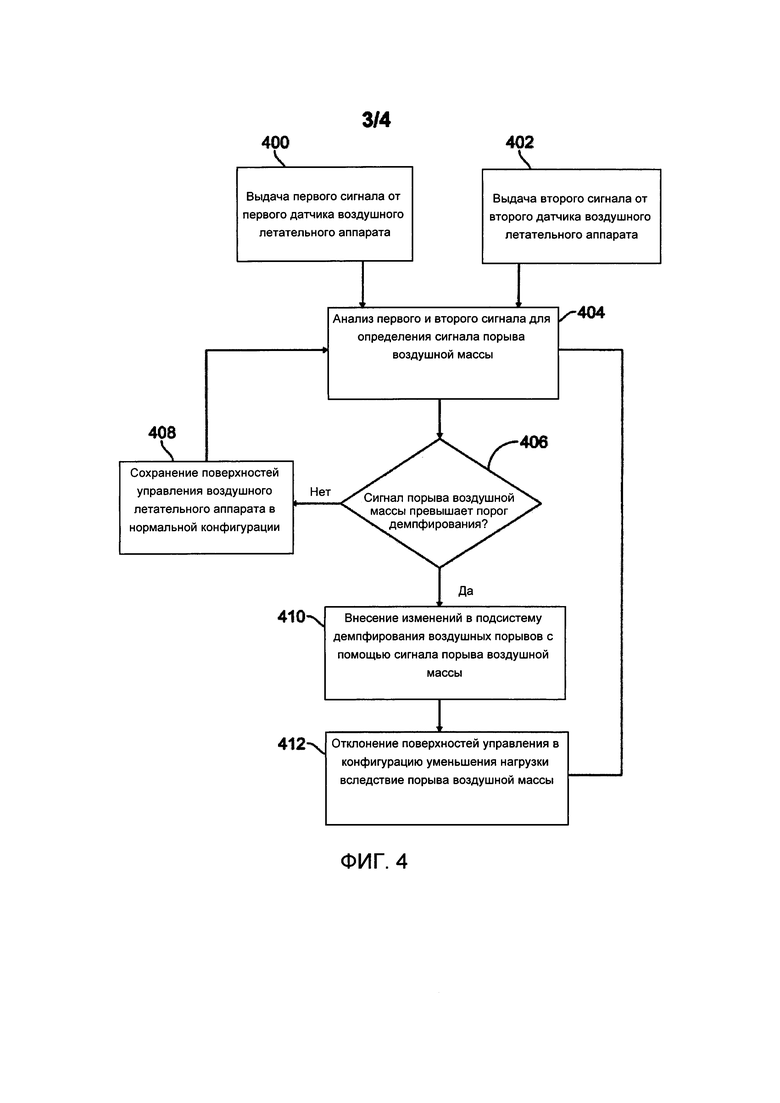
[0049] На ФИГ. 3 показана блок-схема системы 202 компенсации порыва воздушной массы согласно варианту реализации настоящего раскрытия. Подсистема 202 сигналов порыва воздушной массы может включать в себя фильтр 300 (например, фильтр сглаживания перехода), пороговый выключатель 302 и фильтр 304 (например, фильтр с запаздыванием). Хотя элементы показаны выполненными отдельно и обособлено, в альтернативном варианте реализации изобретения блок 206 управления может включать в себя фильтр 300, пороговый выключатель 302 и фильтр 304. В альтернативном варианте реализации изобретения подсистема 202 сигналов порыва воздушной массы может не включать в себя один или оба из фильтров 300 или 304.
[0050] В процессе эксплуатации подсистема 202 сигналов порыва воздушной массы может определять сигнал 226 порыва воздушной массы, как описано выше. Например, блок 206 управления обеспечивает возможность анализа сигнала 222 угла атаки от флюгерного датчика (показано на ФИГ. 2) и инерционного сигнала 224 угла атаки (показано на ФИГ. 2). Каждый из сигнала 222 угла атаки от флюгерного датчика и инерционного сигнала 224 угла атаки может зависеть от продольной базовой плоскости 114 (показано на ФИГ. 1) воздушного летательного аппарата 100 (показано на ФИГ. 1). По существу, каждый из сигналов 222 и 224 угла атаки может представлять собой угловые измерения (например, в градусах) относительно продольной базовой плоскости 114 воздушного летательного аппарата 100. Дополнительно, сигналы 222 и 224 угла атаки могут зависеть от боковых порывов воздушной массы, например. По меньшей мере в одном варианте реализации изобретения блок 206 управления может преобразовывать указанные угловые измерения в измерения скорости и/или ускорения. Например, конкретное угловое измерение может совпадать с скоростью воздушного потока, воздействующего на участок воздушного летательного аппарата, на котором размещены флюгерный датчик 110 и инерциальный датчик (инерциальные датчики) 120.
[0051] Блок 206 управления может определять разницу между сигналом 222 угла атаки от флюгерного датчика и инерционным сигналом 224 угла атаки, а также вырабатывать сигнал 226 порыва воздушной массы. Сигнал 226 порыва воздушной массы может быть отфильтрован фильтром 300 сглаживания перехода, который может быть выполнен с возможностью повторного перемещения компонента постоянного состояния для сигнала 226 порыва воздушной массы, например. Фильтр 300 сглаживания перехода может быть выполнен с возможностью приема дискретных порывов воздушной массы в определенном диапазоне частот нагрузки и игнорирования постоянных порывов воздушной массы, которые могут не подавляться. В альтернативном варианте реализации изобретения подсистема 202 сигналов порыва воздушной массы может не включать в себя фильтр 300 сглаживания перехода.
[0052] После фильтрации фильтром 300 сглаживания перехода сигнал 226 порыва воздушной массы может быть принят пороговым выключателем 302. Пороговый выключатель 302 выполнен с возможностью выдачи сигнала 226 порыва воздушной массы в подсистему LA 204 демпфирования воздушных порывов, когда сигнал 226 порыва воздушной массы соответствует пороговой величине или превышает ее, и которая может быть сохранена в запоминающем устройстве 208. В качестве неограничивающего примера, пороговая величина может составлять 10-20 футов в секунду (3-6 м/с). Соответственно, если пороговая величина превышает 10-20 футов в секунду (3-6 м/с), может быть определено, что нагрузки, воздействующие на крылья, не являются следствием нормального маневрирования воздушного летательного аппарата. В альтернативном варианте реализации изобретения пороговая величина может составлять больше или меньше, чем 10-20 футов в секунду (3-6 м/с). Кроме того, пороговая величина может быть измерена в других единицах, таких как угловые измерения, или единицах силы и/или ускорения. Если сигнал 226 порыва воздушной массы не превышает пороговой величины, подсистема 202 сигналов порыва воздушной массы воздерживается от выдачи сигнала 226 порыва воздушной массы в подсистему LA 204 демпфирования воздушных порывов. В альтернативном варианте реализации изобретения подсистема 202 сигналов порыва воздушной массы может непрерывно выдавать сигнал 226 порыва воздушной массы.
[0053] По меньшей мере в одном варианте реализации изобретения пороговая величина может быть адаптирована на основе входных сигналов управления, вводимых пилотом. Например, когда пилот осуществляет маневрирование самолета, пороговая величина может увеличиваться или уменьшаться на основе необходимого маневра. Если, например, пилот преднамеренно направляет самолет на подъем или снижение, пороговая величина может быть больше, чем если бы воздушный летательный аппарат находился на крейсерской высоте.
[0054] Если сигнал 226 порыва воздушной массы превышает пороговую величину, пороговый выключатель 302 переключается в состояние выдачи. Состояние выдачи может представлять собой или включать в себя коэффициент силы, такой как показатель смещения вследствие порыва воздушной массы. В качестве неограничивающего примера, коэффициент силы может быть числом, кратным силе тяжести, таким как 0,10-0,20 g. Дополнительно, коэффициент силы может быть больше или меньше чем 0,10-0,20 g. По существу, сигнал 226 порыва воздушной массы может быть изменен коэффициентом силы и получен фильтром 304 с запаздыванием. Фильтр 304 с запаздыванием может быть использован для сглаживания сигнала 226 порыва воздушной массы перед его выдачей в подсистему LA 204 демпфирования воздушных порывов. В альтернативном варианте реализации изобретения подсистема 202 сигналов порыва воздушной массы может не включать в себя фильтр 304 с запаздыванием.
[0055] Как описано выше, пороговый выключатель 302 выполнен с возможностью переключения между двумя состояниями: первое состояние, в котором сигнал 226 порыва воздушной массы не выдается в подсистему LA 204 демпфирования воздушных порывов, и второе состояние, в котором сигнал 226 порыва воздушной массы измененяется коэффициентом силы и выдается в подсистему LA 204 демпфирования воздушных порывов. Сигнал 226 порыва воздушной массы, выданный в подсистему LA 204 демпфирования воздушных порывов, может не быть пропорциональным силе порыва воздушной массы, воздействующего на воздушный летательный аппарат. Например, когда пороговая величина превышена, сигнал 226 порыва воздушной массы, который выдают в подсистему LA 204 демпфирования воздушных порывов, может оставаться таким же, не зависимо от того, составляет ли сигнал порыва воздушной массы 20 футов в секунду (6 м/с), 30 футов в секунду (9 м/с), 50 футов в секунду (15 м/с) или т.п. Таким образом, сигнал 226 порыва воздушной массы может быть не пропорциональным фактическому порыву воздушной массы, воздействующему на воздушный летательный аппарат. Вместо этого, выдача сигнала 226 порыва воздушной массы может быть использована для изменения сигнала 220 параметра нагрузки. Сигнал 220 параметра нагрузки, наоборот, может быть пропорционален порыву воздушной массы, воздействующему на воздушный летательный аппарат. Сигнал 226 порыва воздушной массы может изменять сигнал 220 параметра нагрузки и используется для обеспечения возможности для подсистемы LA 204 демпфирования воздушных порывов начать отклонения определенных поверхностей управления воздушного летательного аппарата перед фактическим воздействием порыва воздушной массы на такие участки, как крылья воздушного летательного аппарата. Говоря кратко, сигнал 226 порыва воздушной массы может быть использован для превентивного отклонения поверхностей управления перед воздействием порыва воздушной массы на определенные несущие поверхности (например, крылья) воздушного летательного аппарата. В альтернативном варианте реализации изобретения пороговый выключатель 302 может быть выполнен с возможностью выдачи пропорциональных сигналов порывов воздушной массы в подсистему LA 204 демпфирования воздушных порывов.
[0056] Когда подсистема LA 204 демпфирования воздушных порывов принимает сигнал 226 порыва воздушной массы, подсистема LA 204 демпфирования воздушных порывов может начать отклонение поверхностей управления для уменьшения силы порыва воздушной массы (например, нагрузки вследствие порыва воздушной массы). Сигнал 226 порыва воздушной массы может быть принят подсистемой LA демпфирования воздушных порывов перед анализированием сигнала 220 параметра нагрузки подсистемой LA 204 демпфирования воздушных порывов. Следовательно, подсистема LA 204 демпфирования воздушных порывов посредством сигнала 226 порыва воздушной массы, ожидает порыва воздушной массы и начинает отклонение поверхности (поверхностей) управления воздушного летательного аппарата для подавления порыва воздушной массы до того, как участки воздушного летательного аппарата (такие как крылья) испытают воздействие порыва воздушной массы.
[0057] Хотя это не показано, подсистема LA 204 демпфирования воздушных порывов также может включать в себя различные фильтры. Например, структурный узкополосный режекторный фильтр может быть использован подсистемой LA 204 демпфирования воздушных порывов для фильтрации сигнала 220 параметра нагрузки. Кроме того, нелинейный фильтр может быть использован для фильтрации комбинированного сигнала, который может включать в себя сигнал параметра нагрузки, измененный принятым сигналом 226 порыва воздушной массы. В альтернативном варианте реализации изобретения подсистема LA 204 демпфирования воздушных порывов может включать в себя больше или меньше фильтров, чем описано.
[0058] Со ссылкой на ФИГ. 1-3, порыв воздушной массы может воздействовать на воздушный летательный аппарат 100. Первый датчик воздушного летательного аппарата, такой как флюгерный датчик, обнаруживает порыв воздушной массы и выдает первый сигнал. Например, первый сигнал может быть сигналом угла атаки. Изменение угла атаки по сравнению с сохраненным сигналом нормального ускорения может указывать на порыв воздушной массы. Первый датчик обнаруживает порыв воздушной массы перед вторым датчиком, таким как инерциальный датчик. Подсистема 202 сигналов порыва воздушной массы затем вычисляет сигнал порыва воздушной массы на основе анализа сигналов, принятых от подсистемы датчиков, например посредством (но без ограничения) сравнения первого сигнала, принятого от первого датчика и второго сигнала, принятого от второго датчика. По меньшей мере в одном варианте реализации изобретения подсистема 202 сигналов порыва воздушной массы может преобразовывать угловые измерения первого и второго сигналов в сигналы скорости и/или ускорения. Подсистема 202 сигналов порыва воздушной массы может сравнивать первый и второй сигналы для определения разницы между ними. Если указанная разница превышает пороговую величину, такую как порог активации смещения с учетом порыва воздушной массы, подсистема 202 сигналов порыва воздушной массы выдает сигнал 226 порыва воздушной массы в подсистему LA 204 демпфирования воздушных порывов. Таким образом, выдача сигнала 226 порыва воздушной массы может представлять сигнал активации смещения с учетом порыва воздушной массы, который заставляет подсистему LA демпфирования воздушных порывов совершать отклонение поверхностей управления воздушного летательного аппарата 100 в конфигурацию уменьшения нагрузки вследствие порыва воздушной массы до того, как порыв воздушной массы достигает определенной поверхности, такой как крылья воздушного летательного аппарата. Соответственно, подсистема LA 204 демпфирования воздушных порывов может совершать переход в конфигурацию уменьшения нагрузки вследствие порыва воздушной массы перед воздействием пиковой нагрузки порыва воздушной массы на определенные поверхности, такие как крылья, воздушного летательного аппарата.
[0059] Подсистема 202 сигналов порыва воздушной массы может быть использована для обнаружения дискретных порывов воздушной массы, которые превышают определенный порог. В ответ на выдачу подсистемой 202 сигналов порыва воздушной массы сигнала 226 порыва воздушной массы, который превышает указанный порог, подсистема LA 204 демпфирования воздушных порывов быстро изменяет конфигурацию поверхностей управления (таких как элероны, интерцепторы и т.п.) на конфигурацию уменьшения нагрузки вследствие порыва воздушной массы, выполненную с возможностью уменьшения нагрузки от дискретных порывов воздушной массы на воздушный летательный аппарат 100. Подсистема 202 сигналов порыва воздушной массы подавляет нагрузку вследствие порыва воздушной массы больше, чем, если используется только подсистема LA 204 демпфирования воздушных порывов. Подсистема 202 сигналов порыва воздушной массы выдает сигнал 226 порыва воздушной массы (когда разница между датчиками превышает порог демпфирования воздушных порывов) для добавления показателя смещения вследствие порыва воздушной массы в сигнал 220 параметра нагрузки, благодаря чему осуществляется быстрый переход в конфигурацию уменьшения нагрузки вследствие порыва воздушной массы. Как отмечено, первый датчик (первые датчики) может быть размещен спереди по потоку относительно второго датчика (вторых датчиков) (который может быть размещен на крыльях) и, следовательно, обеспечивает возможность обнаружения порыва воздушной массы до того, как он достигает крыльев.
[0060] При использовании в настоящем документе термин "контроллер", "центральный обрабатывающий блок", "CPU", "компьютер" или т.п. может включать в себя любую систему на основе процессора или микропроцессора, включая системы, использующие микроконтроллеры, компьютеры с сокращенным набором команд (RISC), специализированные интегральные схемы (ASIC), логические схемы и любые другие схемы или процессоры, выполненные с возможностью реализации функций, описанных в настоящем документе. Описанные выше примеры являются лишь иллюстративными и не предназначены для ограничения каким-либо образом определения и/или значения таких терминов.
[0061] Со ссылкой на ФИГ. 2 и 3, блок блок(и) управления (такие как блоки 206 и 210 управления) может (могут) быть выполнен(ы) с возможностью исполнения набора инструкций, которые сохранены в одном или более элементах хранения (таких как запоминающие устройства 208 и 212), чтобы осуществлять обработку данных. Например, каждый блок управления может включать в себя одно или более запоминающих устройств. Элементы хранения могут также хранить данные или другую необходимую или требующуюся информацию. Элемент хранения может быть выполнен в форме источника информации или физического элемента памяти в обрабатывающей машине.
[0062] Набор инструкций может включать в себя различные команды, которые инструктируют блок(и) управления для работы в качестве обрабатывающей машины для выполнения определенных операций, таких как способы и процессы согласно различным вариантам реализации объекта изобретения, описанным в настоящем документе. Набор инструкций может быть выполнен в форме программного обеспечения. Программное обеспечение может быть выполнено в различных формах, таких как системное программное обеспечение или программное обеспечение приложения. Кроме того, программное обеспечение может быть выполнено в виде набора отдельных программ или модулей, программного модуля в составе большой программы или части программного модуля. Программное обеспечение также может включать в себя модульное программирование в форме объектно-ориентированного программирования. Обработка входных данных обрабатывающей машиной может быть проведена в ответ на команды пользователя, или в ответ на результаты предыдущей обработки, или в ответ на запрос, выполненный другой обрабатывающей машиной.
[0063] Схематические изображения вариантов реализации изобретения, представленные в настоящем документе, могут иллюстрировать один или более блоков управления или обработки. Необходимо отметить, что блоки управления или обработки могут представлять собой схемные модули, которые могут быть реализованы в качестве аппаратных средств с соответствующими инструкциями (например, программное обеспечение, сохраненное на материальном и энергонезависимом компьютерочитаемом носителе хранения, таком как компьютерный жесткий диск, ПЗУ, ОЗУ или т.п.), которые выполняют операции, описанные в настоящем документе. Аппаратные средства могут включать в себя схему конечного автомата, реализованную аппаратно для выполнения функций, описанных в настоящем документе. При необходимости аппаратные средства могут включать в себя электронные схемы, которые включают в себя и/или могут быть подключены к одному или более устройствам, выполненным на основе логических схем, таким как микропроцессоры, процессоры, контроллеры или т.п. При необходимости блоки или модули могут представлять собой схему обработки, такую как одно или более из следующего: программируемая вентильная матрица (FPGA), специализированная интегральная схема (ASIC), микропроцессор (микропроцессоры), устройство для квантовых вычислений и/или т.п. Схемы в различных вариантах реализации изобретения могут быть выполнены с возможностью исполнения одного или более алгоритмов для реализации функций, описанных в настоящем документе. Указанные один или более алгоритмов могут включать в себя аспекты вариантов реализации, раскрытых в настоящем документе, независимо от их явного выражения в структурной схеме или способе.
[0064] При использовании в настоящем документе термины "программное обеспечение" и "программно-аппаратные средства" (firmware) являются взаимозаменяемыми и включают в себя любую компьютерную программу, сохраненную в памяти для выполнения компьютером, в том числе в памяти ОЗУ (RAM), памяти ПЗУ (ROM), памяти СППЗУ (EPROM), памяти ЭСППЗУ (EEPROM) и энергонезависимой памяти ОЗУ (NVRAM). Вышеуказанные типы запоминающих устройств являются только примерными и, таким образом, не ограничивают типы запоминающих устройств, выполненных с возможностью использования для хранения компьютерной программы.
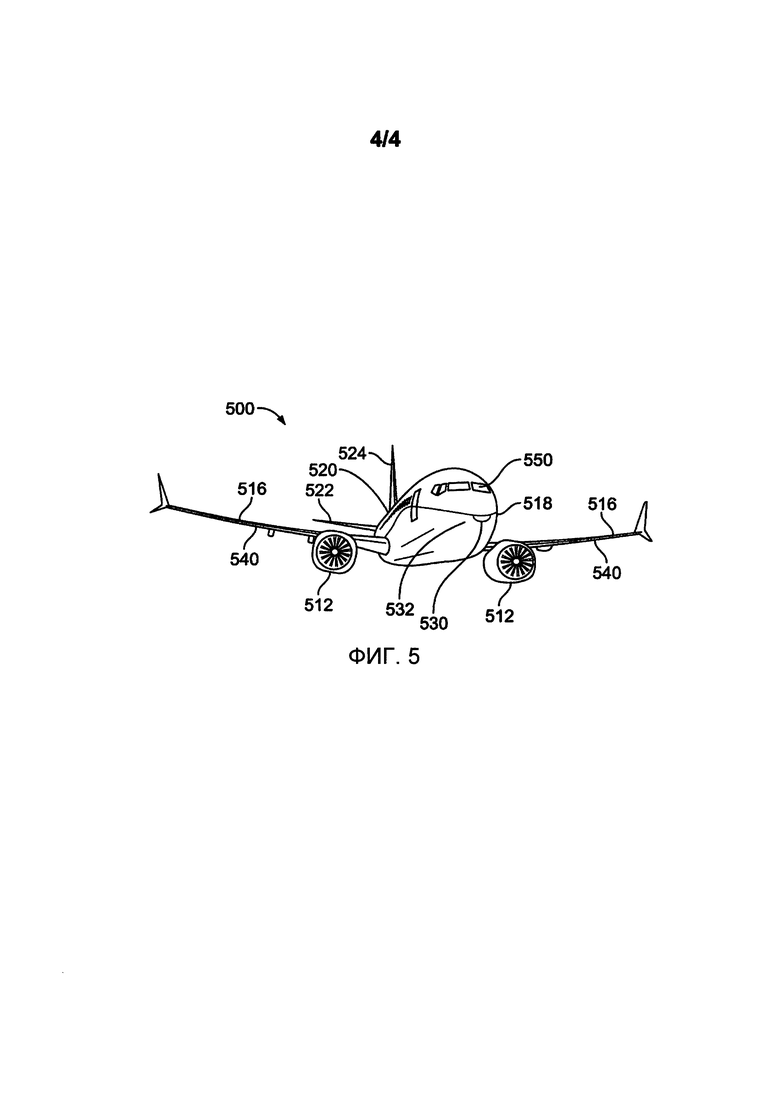
[0065] На ФИГ. 4 показана блок-схема последовательности этапов способа компенсации порыва воздушной массы для воздушного летательного аппарата согласно варианту реализации настоящего раскрытия. На этапе 400 первый датчик (такой как флюгерный датчик, размещенный возле носовой части воздушного летательного аппарата) используют для выдачи первого сигнала (такого как сигнал угла атаки). На этапе 402, второй датчик (такой как инерциальный датчик, размещенный на крыле или в крыле воздушного летательного аппарата или в различных других местах) используют для выдачи второго сигнала (такого как инерционный сигнал угла атаки).
[0066] Первый и второй сигналы могут быть приняты подсистемой сигналов порыва воздушной массы. На этапе 404 первый и второй сигналы подвергают анализу для определения сигнала порыва воздушной массы. По меньшей мере в одном варианте реализации изобретения первый и второй сигналы могут быть выданы в качестве угловых измерений, которые могут быть преобразованы в соответствующие показатели скорости ветра и/или ускорения.
[0067] На этапе 406 определяют, подтверждает ли сигнал порыва воздушной массы команду на разгрузку. Например, определяют, превышает ли сигнал порыва воздушной массы определенный порог демпфирования. Порог демпфирования может иметь пороговое количественное значение, например скорости ветра или нагрузки, которое может быть больше, чем скорость ветра или нагрузка, воздействующая на крылья воздушного летательного аппарата во время преднамеренных летных маневров. Если сигнал порыва воздушной массы не превышает порог демпфирования, согласно способу переходят к этапу 408, на котором поверхности управления воздушного летательного аппарата сохраняют нормальную конфигурацию. Затем согласно способу возвращаются к этапу 404.
[0068] Если, однако, сигнал порыва воздушной массы превышает заранее определенный порог демпфирования на этапе 406, согласно способу переходят к этапу 410, на котором сигнал параметра нагрузки, обнаруженный подсистемой LA демпфирования воздушных порывов, изменяют сигналом порыва воздушной массы. Затем, на этапе 412 подсистема LA демпфирования воздушных порывов отклоняет поверхности управления в конфигурацию уменьшения нагрузки вследствие порыва воздушной массы на основе измененного сигнала параметра нагрузки. Далее процесс возвращают к этапу 404.
[0069] На ФИГ. 5 показан перспективный вид спереди воздушного летательного аппарата 500 согласно варианту реализации настоящего раскрытия. Воздушный летательный аппарат 500 может включать в себя систему обеспечения движения, которая может включать в себя два турбовентиляторных двигателя 512, например. При необходимости система обеспечения движения может включать в себя больше двигателей 512, чем показано. Двигатели 512 размещены на крыльях 516 воздушного летательного аппарата 500. В других вариантах реализации изобретения двигатели 512 могут быть размещены на фюзеляже 518 и/или хвостовом оперении 520. Хвостовое оперение 520 может также быть опорой для горизонтальных стабилизаторов 522 и вертикального стабилизатора 524.
[0070] Крылья 516, горизонтальные стабилизаторы 522 и вертикальный стабилизатор 524 могут каждый включать в себя одну или более поверхностей управления. Первый датчик 530 (или множество первых датчиков), такой как флюгерный датчик, может быть размещен на носовой части 532 воздушного летательного аппарата 500 или возле нее. Второй датчик 540, такой как инерциальный датчик (например, акселерометр) может быть соединен с каждым крылом 516 или иметь другие различные места расположения. Подсистема сигналов порыва воздушной массы и подсистема LA демпфирования воздушных порывов может быть размещена в фюзеляже 518, например, внутри кабины экипажа 550 или других частях внутреннего салона. Подсистема сигналов порыва воздушной массы может иметь сигнальную связь с первым датчиком 530 и вторым датчиком (вторыми датчиками) 540. Подсистема LA демпфирования воздушных порывов может иметь сигнальную связь со вторым датчиком (вторыми датчиками) 540 и подсистемой сигналов порыва воздушной массы.
[0071] Со ссылкой на ФИГ. 1-5, варианты реализации настоящего обеспечивают создание систем и способов быстрого и эффективного конфигурирования воздушного летательного аппарата для компенсации порывов воздушной массы. Варианты реализации настоящего раскрытия обеспечивают создание систем и способов обеспечения противостояния порывам ветра, которые не увеличивают общий вес конструкции воздушного летательного аппарата.
[0072] По меньшей мере в одном варианте реализации изобретения первый и второй датчики могут обнаруживать порыв воздушной массы. На основе анализа сигналов, выданных первым и вторым датчиками, один или более блоков управления могут вырабатывать показатель измерения или прогнозирования порывов воздушной массы. Блок(и) управления может (могут) затем рассчитать команду, относящуюся к показателю измерения или прогнозирования порывов воздушной массы (такую как команда на изменение конфигурации одной или более поверхностей управления). Эта команда также может вызвать изменение конфигурации поверхностей управления для уменьшения нагрузки вследствие порыва воздушной массы. Если блок(и) управления определяет (определяют), что разгрузка не является необходимой (например, если сигнал порыва воздушной массы не превышает определенный порог), изменения конфигурации поверхности управления не происходит, вместо этого сохраняется конфигурация минимального сопротивления.
[0073] Варианты реализации настоящего раскрытия обеспечивают создание систем компенсации порыва воздушной массы и способов, которые обеспечивают возможность адаптивного уменьшения нагрузки вследствие порыва воздушной массы, воздействующего на воздушный летательный аппарат. Например, при обнаружении порыва воздушной массы варианты реализации настоящего раскрытия могут переключать поверхности управления воздушного летательного аппарата из нормальной конфигурации в конфигурацию уменьшения нагрузки вследствие порыва воздушной массы (при которой одна или более поверхностей управления отклонены).
[0074] Варианты реализации настоящего раскрытия могут быть использованы для уменьшения нагрузки на фюзеляж, крыло (крылья), хвостовое оперение и/или т.п. воздушного летательного аппарата. Варианты реализации настоящего раскрытия обеспечивают создание по отдельности или совместно систем и способов уменьшения нагрузки вследствие порыва воздушной массы и маневров. Поверхности управления могут быть задействованы по отдельности или в сочетании друг с другом для уменьшения нагрузки. Кроме того, некоторые варианты реализации настоящего раскрытия могут быть использованы для компенсирования непреднамеренных и переходных возмущений воздушного летательного аппарата в результате отклонения поверхностей управления в конфигурацию демпфирования воздушных порывов.
[0075] Хотя для описания вариантов реализации настоящего раскрытия могут быть использованы различные термины в отношении пространства и направления, такие как верхний, днищевой, нижний, серединный, боковой, горизонтальный, вертикальный, передний и т.п., следует отметить, что такие термины использованы только в отношении ориентации, показанных на чертежах. Ориентации могут быть перевернуты, повернуты или иным образом изменены, так что верхний участок становится нижним участком и наоборот, горизонтальный становится вертикальным и т.п.
[0076] При использовании в настоящем документе конструкция, ограничение или элемент, который "выполнен с возможностью" выполнения задания или операции, конструктивно выполнен, изготовлен или приспособлен конкретно таким образом, чтобы он соответствовал этому заданию или этой операции. Для целей пояснения и во избежание недоразумений, при использовании в настоящем документе, объект, который просто обладает способностью изменения для выполнения задания или операции, не является "выполненным с возможностью" выполнения этого задания или этой операции.
[0077] Следует понимать, что представленное выше описание предназначается для иллюстрации и не является ограничительным. Например, описанные выше варианты реализации изобретения (и/или их аспекты) могут быть использованы в комбинации друг с другом. В дополнение, для адаптации к конкретной ситуации или материалу может быть выполнено множество модификаций идей различных вариантов реализации раскрытия без отхода от его сущности. Хотя размеры и типы материалов, описанные в настоящем документе, предназначены для задания параметров различных вариантов реализации раскрытия, указанные варианты реализации никоим образом не являются ограничительными и представляют собой примерные варианты реализации. Специалистам в данной области техники при рассмотрении приведенного выше описания будут очевидны многие другие варианты реализации изобретения. Следовательно, объем различных вариантов реализации раскрытия должен быть определен со ссылкой на прилагаемую формулу изобретения вместе с полным объемом эквивалентов, на которые такая формула изобретения имеет право. В прилагаемой формуле изобретения выражения "включающий в себя" и "в котором" (in which) использованы в качестве простых английских эквивалентов соответствующих выражений "содержащий/включающий" и "в котором" (wherein). Более того, выражения "первый", "второй" и "третий" и т.п. использованы только в качестве обозначений и не предназначены для наложения численных требований к их объектам. Кроме того, ограничения следующей формулы изобретения не записаны в формате "средство-плюс-функция" и не предназначены для интерпретации на основе раздела 35 U.S.C. §112(f), если только для таких ограничений формулы изобретения явным образом не используется выражение "средство для", за которым следует изложение функции без последующей конструкции.
[0078] В этом письменном описании используются примеры для раскрытия различных вариантов его реализации, включающих в себя наилучший вариант, а также обеспечивается возможность любому специалисту в данной области техники применения на практике различных вариантов реализации раскрытия, включающих в себя выполнение и использование любых устройств или систем и использование любых включенных способов. Патентоспособный объем различных вариантов реализации раскрытия определяется формулой изобретения и может включать в себя другие примеры, которые окажутся очевидными для специалистов в данной области техники. Такие другие примеры предназначены для включения в пределы объема формулы изобретения, если указанные примеры имеют структурные элементы, которые не отличаются от буквального изложения формулы изобретения, или если указанные примеры включают в себя эквивалентные структурные элементы, которые имеют несущественные отличия от буквального изложения формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА АДАПТИВНОЙ ФИЛЬТРАЦИИ ДЛЯ АЭРОДИНАМИЧЕСКИХ УГЛОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2735751C2 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ВИХРЕВОЙ БЕЗОПАСНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2324953C2 |
| ЛЕГКИЙ МНОГОРЕЖИМНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2007 |
|
RU2348568C1 |
| СПОСОБ И УСТРОЙСТВО ВЫЧИСЛЕНИЯ ТЕКУЩЕГО ЗНАЧЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2663315C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ВОЗДУШНЫХ ПАРАМЕТРОВ ПОЛЕТА | 2005 |
|
RU2290646C1 |
| Способ обеспечения вихревой безопасности летательного аппарата | 2021 |
|
RU2774083C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| Интеллектуальная система поддержки экипажа летательного аппарата | 2024 |
|
RU2839176C1 |
Группа изобретений относится к системе и способу компенсации порыва воздушной массы, воздушному летательному аппарату. Система содержит подсистему датчиков, подсистему сигналов порыва воздушной массы, выполненную с возможностью выдачи сигнала для перемещения поверхностей управления в ответ на этот сигнал. Способ включает обнаружение по меньшей мере одного параметра воздушного летательного аппарата с помощью первого датчика, размещенного возле передней части воздушного летательного аппарата, выдачу первого сигнала на основе указанного по меньшей мере одного параметра от первого датчика, обнаружение указанного по меньшей мере одного параметра воздушного летательного аппарата с помощью второго датчика, выдачу второго сигнала на основе указанного по меньшей мере одного параметра от второго датчика, использование подсистемы сигналов порыва воздушной массы для выработки сигнала порыва воздушной массы на основе анализа первого и второго сигналов, изменение сигнала параметра нагрузки с помощью сигнала порыва воздушной массы в ответ на сигнал порыва воздушной массы. Воздушный летательный аппарата содержит систему компенсации порыва воздушной массы, выполненную с возможностью адаптивного уменьшения нагрузки вследствие порыва воздушной массы, воздействующего на воздушный летательный аппарат. Обеспечивается адаптивное уменьшение нагрузки вследствие порыва воздушной массы, воздействующего на воздушный летательный аппарат. 3 н. и 17 з.п. ф-лы, 5 ил.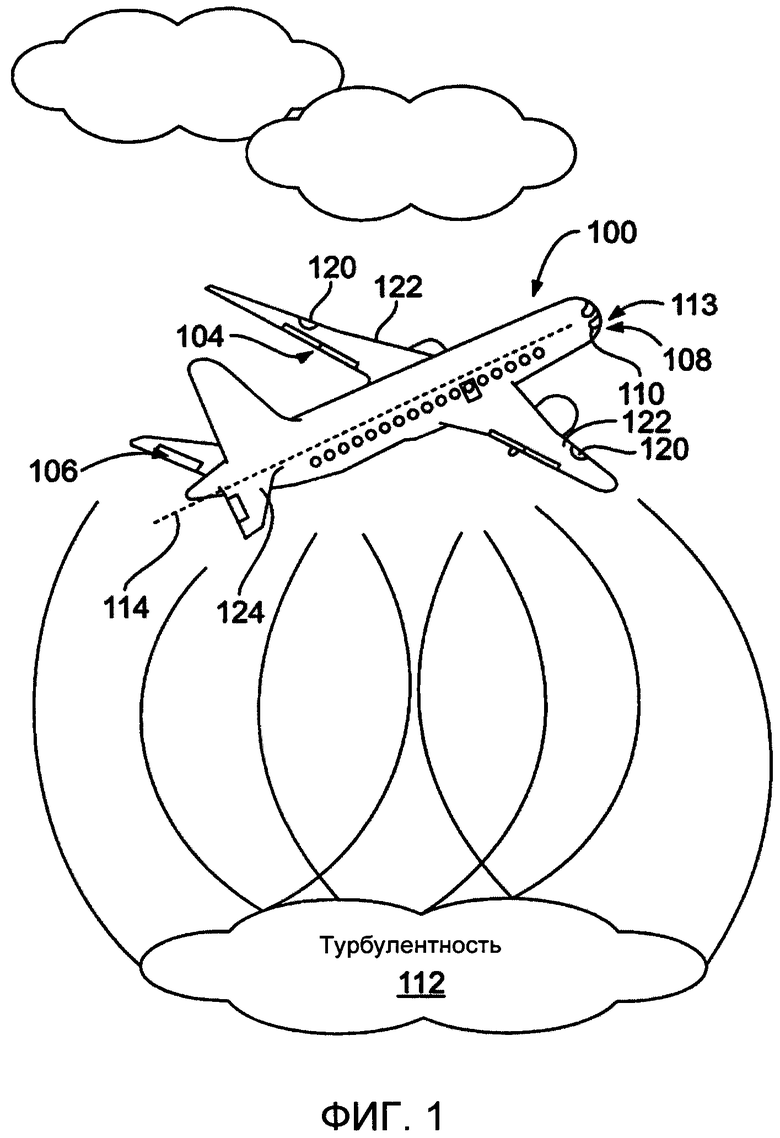
1. Система компенсации порыва воздушной массы, выполненная с возможностью адаптивного уменьшения нагрузки вследствие порыва воздушной массы, воздействующего на воздушный летательный аппарат, содержащая:
- подсистему датчиков, соединенную с воздушным летательным аппаратом, при этом подсистема датчиков выполнена с возможностью выдачи одного или более сигналов; и
- подсистему сигналов порыва воздушной массы, выполненную с возможностью приема указанных одного или более сигналов и выработки сигнала порыва воздушной массы на основе анализа указанных одного или более сигналов, причем подсистема сигналов порыва воздушной массы выполнена с возможностью выдачи сигнала порыва воздушной массы для перемещения поверхностей управления в ответ на этот сигнал.
2. Система компенсации порыва воздушной массы по п. 1, в которой подсистема датчиков содержит:
- первый датчик, размещенный возле передней части воздушного летательного аппарата и выполненный с возможностью выдачи первого сигнала; и
- второй датчик, расположенный на удалении от передней части воздушного летательного аппарата и выполненный с возможностью выдачи второго сигнала, причем
подсистема сигналов порыва воздушной массы выполнена с возможностью приема первого и второго сигналов и выработки сигнала порыва воздушной массы на основе анализа первого и второго сигналов, и
подсистема сигналов порыва воздушной массы выполнена с возможностью выдачи сигнала порыва воздушной массы для перемещения поверхностей управления в ответ на сигнал порыва воздушной массы.
3. Система компенсации порыва воздушной массы по п. 1, в которой подсистема сигналов порыва воздушной массы выполнена с возможностью выдачи сигнала порыва воздушной массы для изменения сигнала параметра нагрузки в ответ на сигнал порыва воздушной массы, превышающий порог демпфирования воздушных порывов.
4. Система компенсации порыва воздушной массы по п. 1, в которой сигнал параметра нагрузки, измененный сигналом порыва воздушной массы, заставляет поверхности управления воздушного летательного аппарата изменить нормальную конфигурацию на конфигурацию уменьшения нагрузки вследствие порыва воздушной массы.
5. Система компенсации порыва воздушной массы по п. 1, дополнительно содержащая подсистему демпфирования воздушных порывов (LA), функционально соединенную с одной или более поверхностями управления воздушного летательного аппарата, причем
подсистема LA демпфирования воздушных порывов выполнена с возможностью обнаружения сигнала параметра нагрузки, при этом
подсистема LA демпфирования воздушных порывов выполнена с возможностью сохранения указанных одной или более поверхностей управления в нормальной конфигурации, когда сигнал параметра нагрузки не изменен сигналом порыва воздушной массы, и
подсистема LA демпфирования воздушных порывов выполнена с возможностью перемещения указанных одной или более поверхностей управления в конфигурацию уменьшения нагрузки вследствие порыва воздушной массы в ответ на изменение сигнала параметра нагрузки сигналом порыва воздушной массы.
6. Система компенсации порыва воздушной массы по п. 2, в которой
первый датчик содержит флюгерный датчик, который выполнен с возможностью выдачи первого сигнала, такого как сигнал угла атаки от флюгерного датчика, а
второй датчик является инерциальным датчиком, который выполнен с возможностью выдачи второго сигнала, такого как инерционный сигнал угла атаки.
7. Система компенсации порыва воздушной массы по п. 5, в которой флюгерный датчик размещен возле носовой части воздушного летательного аппарата, а
инерциальный датчик размещен на или в крыле или фюзеляже воздушного летательного аппарата.
8. Система компенсации порыва воздушной массы по п. 2, в которой один или оба из первого и второго датчиков выполнены с возможностью одного или более из следующего: прямое измерение порыва воздушной массы, измерение угла атаки, вызванного порывом воздушной массы, или обнаружение давления или силы.
9. Система компенсации порыва воздушной массы по п. 1, в которой порог демпфирования воздушных порывов содержит величину нагрузки, которая превышает нагрузку, действующую на крыло воздушного летательного аппарата, вызванную преднамеренным маневрированием воздушного летательного аппарата.
10. Система компенсации порыва воздушной массы по п. 1, в которой подсистема сигналов порыва воздушной массы содержит по меньшей мере один блок управления, функционально соединенный по меньшей мере с одним запоминающим устройством.
11. Система компенсации порыва воздушной массы по п. 1, в которой подсистема сигналов порыва воздушной массы выполнена с возможностью выработки сигнала порыва воздушной массы согласно следующему выражению:
α_gust=α_air+(sin-1((VS-L*q*π/180)/TAS)+β*sinФ-θ)/cosФ,
где
α_gust является сигналом порыва воздушной массы,
θ является углом тангажа воздушного летательного аппарата,
β является углом бокового скольжения воздушного летательного аппарата,
Ф является углом крена воздушного летательного аппарата,
q является угловой скоростью тангажа воздушного летательного аппарата,
VS является вертикальной скоростью воздушного летательного аппарата,
TAS является истинной воздушной скоростью воздушного летательного аппарата, и
α_air является углом атаки для флюгерного датчика.
12. Способ компенсации порыва воздушной массы, обеспечивающий возможность адаптивного уменьшения воздействия порывов воздушной массы на воздушный летательный аппарат, включающий:
обнаружение по меньшей мере одного параметра воздушного летательного аппарата с помощью первого датчика, размещенного возле передней части воздушного летательного аппарата;
выдачу первого сигнала на основе указанного по меньшей мере одного параметра от первого датчика;
обнаружение указанного по меньшей мере одного параметра воздушного летательного аппарата с помощью второго датчика;
выдачу второго сигнала на основе указанного по меньшей мере одного параметра от второго датчика;
использование подсистемы сигналов порыва воздушной массы для выработки сигнала порыва воздушной массы на основе анализа первого и второго сигналов и
изменение сигнала параметра нагрузки с помощью сигнала порыва воздушной массы в ответ на сигнал порыва воздушной массы.
13. Способ компенсации порыва воздушной массы по п. 12, согласно которому второй датчик расположен на удалении от передней части воздушного летательного аппарата, причем
способ компенсации порыва воздушной массы дополнительно включает сравнение сигнала порыва воздушной массы с порогом демпфирования воздушных порывов, а
изменение работы включает изменение сигнала параметра нагрузки с помощью сигнала порыва воздушной массы в ответ на сигнал порыва воздушной массы, превышающего порог демпфирования воздушных порывов.
14. Способ компенсации порыва воздушной массы по п. 12, согласно которому дополнительно заставляют поверхности управления воздушного летательного аппарата изменить нормальную конфигурацию на конфигурацию уменьшения нагрузки вследствие порыва воздушной массы в ответ на изменение работы.
15. Способ компенсации порыва воздушной массы по п. 12, также включающий:
обработку сигнала параметра нагрузки с помощью подсистемы демпфирования воздушных порывов (LA);
сохранение поверхностей управления в нормальной конфигурации, когда сигнал параметра нагрузки не изменен сигналом порыва воздушной массы, и
перемещение поверхностей управления в конфигурацию уменьшения нагрузки вследствие порыва воздушной массы в ответ на изменение работы.
16. Способ компенсации порыва воздушной массы по п. 12, в котором порог демпфирования воздушных порывов содержит величину нагрузки, которая превышает нагрузку, действующую на крыло воздушного летательного аппарата, вызванную преднамеренным маневрированием воздушного летательного аппарата.
17. Способ компенсации порыва воздушной массы по п. 10, в котором сигнал порыва воздушной массы определяют согласно следующему выражению:
α_gust=α_air+(sin-1VS-L*q*π/180)/TAS)+β*sinФ-θ)/cosФ,
где
α_gust является сигналом порыва воздушной массы,
θ является углом тангажа воздушного летательного аппарата,
β является углом бокового скольжения воздушного летательного аппарата,
Ф является углом крена воздушного летательного аппарата,
q является угловой скоростью тангажа воздушного летательного аппарата,
VS является вертикальной скоростью воздушного летательного аппарата,
TAS является истинной воздушной скоростью воздушного летательного аппарата, и
α_air является углом атаки для флюгерного датчика.
18. Воздушный летательный аппарат, содержащий:
- фюзеляж, включающий в себя внутренний салон, имеющий кабину экипажа, размещенную возле носовой части воздушного летательного аппарата;
- первое и второе крылья, проходящие от фюзеляжа; по меньшей мере один вертикальный стабилизатор;
- по меньшей мере один горизонтальный стабилизатор;
- одну или более поверхностей управления, прикрепленных с возможностью перемещения к одному или более из следующего: первое и второе крылья, по меньшей мере один вертикальный стабилизатор и по меньшей мере один горизонтальный стабилизатор; и
- систему компенсации порыва воздушной массы, выполненную с возможностью адаптивного уменьшения нагрузки вследствие порыва воздушной массы, воздействующего на воздушный летательный аппарат, содержащую:
- первый датчик, закрепленный возле носовой части и выполненный с возможностью выдачи первого сигнала;
-- второй датчик, расположенный на удалении от носовой части и выполненный с возможностью выдачи второго сигнала;
-- подсистему сигналов порыва воздушной массы, выполненную с возможностью приема первого и второго сигналов и выработки сигнала порыва воздушной массы на основе анализа первого и второго сигналов, при этом
подсистема сигналов порыва воздушной массы выполнена с возможностью выдачи сигнала порыва воздушной массы для изменения сигнала параметра нагрузки в ответ на сигнал порыва воздушной массы, превышающий порог демпфирования воздушных порывов; и
-- подсистему демпфирования воздушных порывов (LA), функционально соединенную с указанными одной или более поверхностями управления, при этом
подсистема LA демпфирования воздушных порывов выполнена с возможностью обнаружения сигнала параметра нагрузки, а также
подсистема LA демпфирования воздушных порывов выполнена с возможностью сохранения указанных одной или более поверхностей управления в нормальной конфигурации, когда сигнал параметра нагрузки не изменен сигналом порыва воздушной массы, и
подсистема LA демпфирования воздушных порывов выполнена с возможностью перемещения указанных одной или более поверхностей управления в конфигурацию уменьшения нагрузки вследствие порыва воздушной массы в ответ на изменение сигнала параметра нагрузки сигналом порыва воздушной массы.
19. Воздушный летательный аппарат по п. 18, в котором
первый датчик является флюгерным датчиком, который выполнен с возможностью выдачи первого сигнала в качестве сигнала угла атаки от флюгерного датчика,
второй датчик является инерциальным датчиком, прикрепленным к фюзеляжу или одному из первого и второго крыльев, причем
инерциальный датчик выполнен с возможностью выдачи второго сигнала, такого как инерционный сигнал угла атаки.
20. Воздушный летательный аппарат по п. 18, в котором подсистема сигналов порыва воздушной массы выполнена с возможностью выработки сигнала порыва воздушной массы согласно следующему выражению:
α_gust=α_air+(sin-1((VS-L*q*π/180)/TAS)+β*sinФ-θ)/cosФ,
где
α_gust является сигналом порыва воздушной массы,
θ является углом тангажа воздушного летательного аппарата,
β является углом бокового скольжения воздушного летательного аппарата,
Ф является углом крена воздушного летательного аппарата,
q является угловой скоростью тангажа воздушного летательного аппарата,
VS является вертикальной скоростью воздушного летательного аппарата,
TAS является истинной воздушной скоростью воздушного летательного аппарата, и
α_air является углом атаки для флюгерного датчика.
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОСЛАБЛЕНИЯ ВОЗДЕЙСТВИЙ ВЕРТИКАЛЬНОЙ ТУРБУЛЕНТНОСТИ НА ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2006 |
|
RU2377159C1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| DE 102006003199 B3, 02.08.2007 | |||
| DE 102004029196 A1, 12.01.2006 | |||
| US 20130166110 A1, 27.06.2013. | |||

