Область техники
Настоящее изобретение относится к способу и устройству определения поворота направо-налево для транспортного средства с содействием вождению.
Уровень техники
[0002] В предшествующем уровне техники известны способы определения поворота налево/направо, в которых отображение, побуждающее встречное транспортное средство совершать поворот направо или налево, выполняется, когда встречное транспортное средство совершает поворот направо через полосу движения, на которой рассматриваемое транспортное средство движется, и рассматриваемое транспортное средство определяется как остановившееся (например, см. патентную ссылку 1).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентная ссылка 1: JP-A 2011-180965
Раскрытие сущности изобретения
Проблемы, решаемые изобретением
[0004] Однако эти способы определения поворота направо/налево предшествующего уровня техники представляют собой методики, в которых рассматриваемое транспортное средство, которое движется прямо относительно встречного транспортного средства, совершающего поворот направо, уступает путь продвижения вперед и определяется, разрешать ли транспортному средству, движущемуся прямо, сделать поворот налево или направо. Следовательно, ничего не раскрывается в отношении определения, разрешать ли движение для поворота направо или налево в транспортном средстве, которое должно повернуть направо или налево через полосу встречного движения, и возможно, что движение для поворота направо или налево в подходящее время является невозможным.
[0005] Настоящее изобретение было разработано с акцентом на проблему, описанную выше, поскольку задачей изобретения является создание способа и устройства определения поворота направо-налево для транспортного средства с содействием вождению, посредством которого можно соответствующим образом определять, разрешать ли движение для поворота направо или налево через полосу встречного движения.
Средства, используемые для решения упомянутых выше проблем
[0006] Для решения задачи, описанной выше, настоящее изобретение представляет собой способ определения поворота направо-налево для транспортного средства с содействием вождению, которое содержит бортовой датчик, который получает информацию о периферии рассматриваемого транспортного средства и информацию о рассматриваемом транспортном средстве, и контроллер, который выполняет определение разрешения для движения для поворота направо/налево через полосу встречного движения на основе информации, полученной бортовым датчиком. В этом способе определения поворота направо/налево, во-первых, определяют, остановилось ли рассматриваемое транспортное средство с намеченным движением для поворота направо/налево. Затем, когда выполняется определение остановки для поворота налево/направо для рассматриваемого транспортного средства, определяют, имеется ли встречное транспортное средство на предполагаемой траектории движения рассматриваемого транспортного средства. Затем, когда определяется, что встречное транспортное средство не присутствует на предполагаемой траектории движения, определяют то, остановилось ли встречное транспортное средство на дальней стороне на полосе встречного движения, которое присутствует на дальней стороне намеченной траектории движения. Когда определяется, что встречное транспортное средство на дальней стороне остановилось, движение для поворота налево/направо разрешается.
ЭФФЕКТ ИЗОБРЕТЕНИЯ
[0007] Следовательно, в настоящем изобретении может быть надлежащим образом определено, разрешать ли движение для поворота налево/направо через полосу встречного движения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
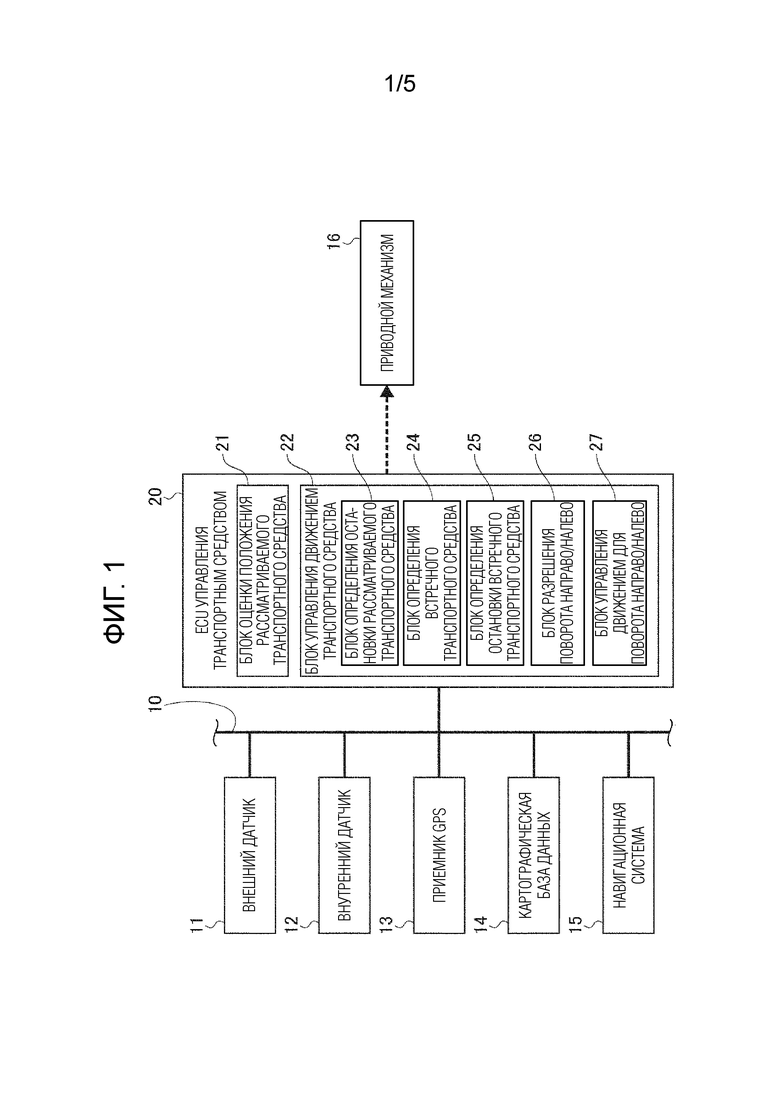
[0008] Фиг.1 - общий чертеж конфигурации системы определения поворота направо первого варианта осуществления;
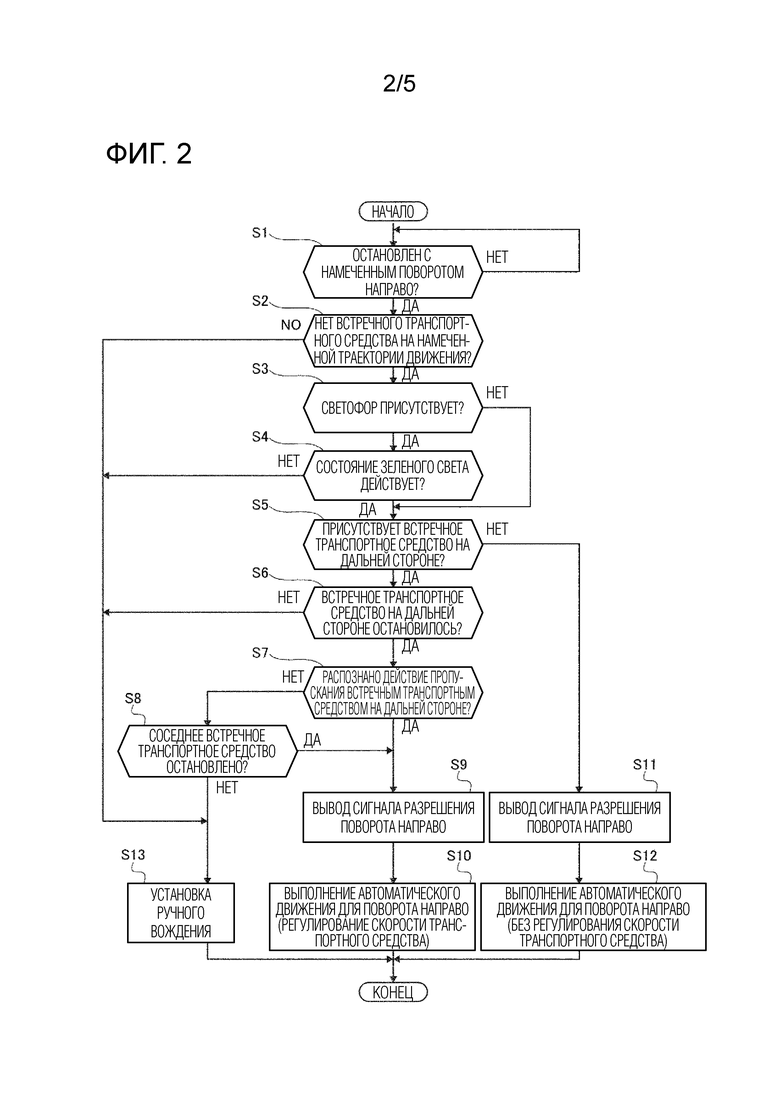
Фиг.2 - блок-схема последовательности операций процесса управления поворотом направо/налево, выполняемого блоком управления движением транспортного средства первого варианта осуществления;
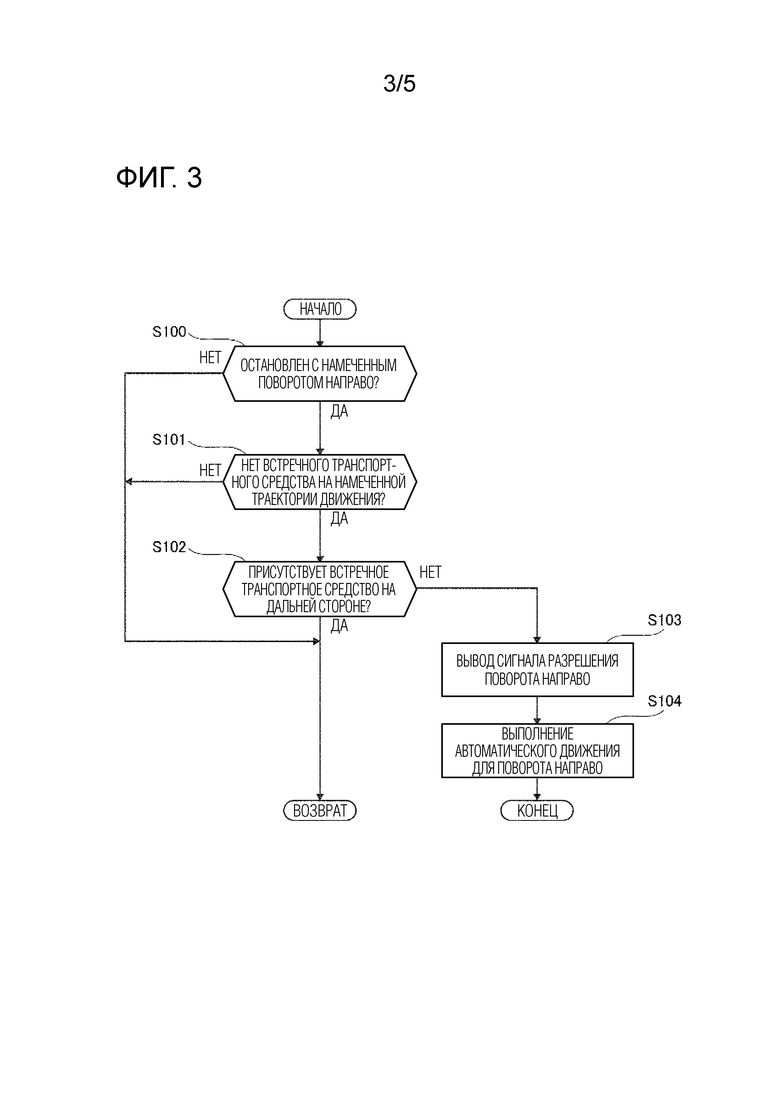
Фиг.3 - блок-схема последовательности операций управления поворотом направо/налево сравнительного примера;
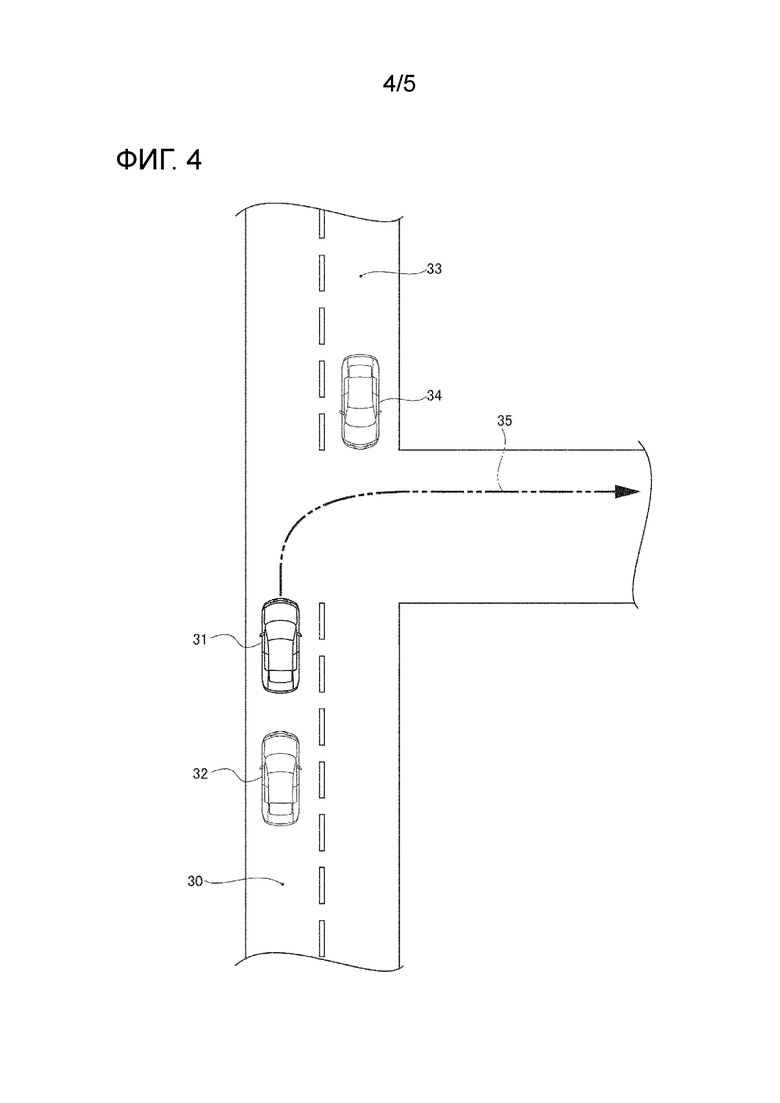
Фиг.4 - схема ситуации на перекрестке, в которой рассматриваемое транспортное средство находится в остановленном состоянии с предполагаемым движением для поворота направо; и
Фиг.5 - схема ситуации на перекрестке, в которой транспортное средство с содействием вождению, в котором применяется способ определения поворота направо/налево по первому варианту осуществления, находится в остановленном состоянии с намеченным движением для поворота направо.
Предпочтительные варианты осуществления изобретения
[0009] Предпочтительный вариант осуществления способа и устройства определения поворота направо-налево для транспортного средства с содействием вождению по настоящему изобретению описан ниже на основе первого варианта осуществления, показанного на чертежах.
[0010] [Первый вариант осуществления]
Сначала будет описана конфигурация. Способ определения поворота направо/налево и устройство определения поворота направо/налево в первом варианте осуществления применяются к транспортному средству с содействием вождению, которое оборудовано системой определения поворота направо, которая определяет, следует ли разрешить поворот направо, когда намечено движение для поворота направо через полосу встречного движения, и которое выполнено с возможностью автономного вождения, при котором движение для поворота направо выполняется автоматически, когда поворот направо разрешен. Описание конфигурации первого варианта осуществления ниже разделено на «Общая конфигурация системы для системы определения поворота направо», «Подробная конфигурация блока управления определением поворота направо» и «Конфигурация процесса управления поворотом направо».
[0011] [Общая конфигурация системы для системы определения поворота направо]
Система 1 определения поворота направо по первому варианту осуществления снабжена внешним датчиком 11, внутренним датчиком 12, приемником 13 GPS, картографической базой 14 данных и навигационной системой 15, как показано на фиг.1. Система дополнительно снабжена ECU (ЭБУ) 20 управления транспортным средством и приводным механизмом (актуатором) 16.
[0012] Внешний датчик 11 предусмотрен для рассматриваемого транспортного средства и является датчиком (бортовым датчиком) для получения информации о периферии рассматриваемого транспортного средства во время движения. Внешний датчик 11 в соответствии с первым вариантом осуществления представляет собой обычно используемую стереокамеру и получает информацию о периферии рассматриваемого транспортного средства путем анализа данных сфотографированного изображения. Информация о периферии рассматриваемого транспортного средства, полученная внешним датчиком 11, выводится в ECU 20 управления транспортным средством и навигационную систему 15 через линию 10 связи CAN. Вместо стереокамеры внешним датчиком 11 может быть парктроник с использованием ультразвуковых волн, лазерный дальномер с использованием инфракрасного лазера и т.д.
[0013] Внутренний датчик 12 предусмотрен для рассматриваемого транспортного средства и является датчиком (бортовым датчиком) для обнаружения состояния движения рассматриваемого транспортного средства. В этом варианте осуществления внутренний датчик 12 представляет собой датчик скорости транспортного средства, датчик угла рыскания, датчик угла поворота рулевого колеса и т.д. Информация о рассматриваемом транспортном средстве, указывающая состояние движения рассматриваемого транспортного средства, полученная внутренним датчиком 12, выводится в ECU 20 управления транспортным средством и навигационную систему 15 через линию 10 связи CAN.
[0014] Приемник 13 GPS принимает сигналы от трех или более спутников GPS, извлекает данные, необходимые для определения положения, основываясь на этих сигналах, и получает информацию GPS, указывающую положение рассматриваемого транспортного средства. Информация GPS, полученная приемником 13 GPS, выводится в ECU 20 управления транспортным средством и в навигационную систему 15 по линии 10 связи CAN.
[0015] Картографическая база 14 данных хранится в бортовой памяти (не показана) и представляет собой базу данных, снабженную картографической информацией, в которую записываются: информация о движении, такая как наклон и ограничение скорости; информация о периферии дорог, такая как светофоры, знаки, телефонные столбы, сооружения (туннели, мосты, пешеходные переходы и т.д.), магазины и автостоянки; и индикаторная информация, такая как белые линии и стоп-линии. На информацию из картографической базы 14 данных ссылаются из ECU 20 управления транспортным средством и навигационной системы 15 по линии 10 связи CAN.
[0016] Навигационная система 15 оценивает положение рассматриваемого транспортного средства (собственное положение) на карте с использованием различных элементов информации, вводимых от внешнего датчика 11, внутреннего датчика 12, приемника 13 GPS и картографической базы 14 данных. Намеченный маршрут движения к пункту назначения генерируется на основе оцененной информации о рассматриваемом положении, информации о пункте назначения, установленной на карте водителем рассматриваемого транспортного средства, и т.д. Кроме того, руководство для сгенерированного намеченного маршрута движения передается водителю. Информация о маршруте движения и информация о рассматриваемом положении, генерируемая навигационной системой 15, выводится в ECU 20 управления транспортным средством через линию 10 связи CAN.
[0017] ECU 20 управления транспортным средством представляет собой интегрированный контроллер, который использует различные элементы информации, введенные от внешнего датчика 11, внутреннего датчика 12, приемника 13 GPS, картографической базы 14 данных, навигационной системы 15 и бортовой памяти (не показано) для вывода управляющей команды, предписывающей рассматриваемому транспортному средству двигаться по намеченному маршруту движения. Управляющая команда, выводимая из ECU 20 управления транспортным средством, вводится в приводной механизм 16 по мере необходимости. ECU 20 управления транспортным средством имеет блок 21 оценки положения рассматриваемого транспортного средства и блок 22 управления движением транспортного средства.
[0018] Блок 21 оценки положения рассматриваемого транспортного средства оценивает положение движения рассматриваемого транспортного средства, используя различные элементы информации, введенные от внешнего датчика 11, внутреннего датчика 12, приемника 13 GPS, картографической базы 14 данных и навигационной системы. 15.
[0019] Когда рассматриваемое транспортное средство определяется блоком 21 оценки положения рассматриваемого транспортного средства как остановившееся, блок 22 управления движением транспортного средства (контроллер) определяет, является ли эта остановка остановкой, для которой намечено движение для поворота направо через полосу встречного движения. Когда определено, что транспортное средство остановилось с намеченным движением для поворота направо через полосу встречного движения, выполняется управление определением разрешения поворота направо. При управлении определением разрешения поворота направо различные элементы информации, вводимые из внешнего датчика 11, внутреннего датчика 12, приемника 13 GPS, картографической базы 14 данных и навигационной системы 15, используются для определения того, является ли движение для поворота направо возможным для рассматриваемого транспортного средства, и разрешение на движение для поворота направо выводится в соответствии с результатом определения. В блоке 22 управления движением транспортного средства сигнал управления поворотом направо, который предписывает рассматриваемому транспортному средству совершать поворот направо, выводится, когда выводится разрешение для поворота направо.
[0020] Приводной механизм 16 содержит различные исполнительные механизмы, которые приводят в действие педаль акселератора, тормоз и рулевое колесо, которые управляют транспортным средством. Приводной механизм 16 приводится в действие на основе команды управления движением, выводимой из блока 22 управления движением транспортного средства.
[0021] [Подробная конфигурация блока управления движением транспортного средства]
Блок 22 управления движением транспортного средства по первому варианту осуществления имеет блок 23 определения остановки рассматриваемого транспортного средства, блок 24 определения встречного транспортного средства, блок 25 определения остановки встречного транспортного средства, блок 26 разрешения поворота направо/налево и блок 27 управления движением для поворота направо/налево, как показано на фиг.1.
[0022] От внутреннего датчика 12 блок 23 определения остановки рассматриваемого транспортного средства получает информацию о рассматриваемом транспортном средстве, включая скорость рассматриваемого транспортного средства и о том, работает или нет индикатор поворота. Этот блок определения также получает информацию о маршруте движения из навигационной системы 15. На основе информации о рассматриваемом транспортном средстве и информации о маршруте движения, когда транспортное средство остановлено, достигнув скорости, равной нулю, этот блок определения определяет, является ли остановка остановкой, для которой намечено движение для поворота направо через полосу встречного движения. В частности, блок 23 определения остановки рассматриваемого транспортного средства определяет, остановилось ли рассматриваемое транспортное средство с намеченным движением для поворота направо через полосу встречного движения.
[0023] Блок 24 определения встречного транспортного средства обращается к картографической базе 14 данных для получения картографической информации, когда транспортное средство определено посредством блока 23 определения остановки рассматриваемого транспортного средства как остановившееся с намеченным движением для поворота направо. Блок 24 определения встречного транспортного средства также получает информацию о маршруте движения из навигационной системы 15. Этот блок определения ищет намеченную траекторию движения для рассматриваемого транспортного средства во время поворота направо на основе картографической информации и информации о маршруте движения. После того, как намеченная траектория движения найдена, блок 24 определения встречного транспортного средства получает информацию о положении встречного транспортного средства на основе информации о периферии от внешнего датчика 11 и определяет, имеется ли встречное транспортное средство на намеченной траектории движения.
[0024] Когда блок 24 определения встречного транспортного средства определил, что на намеченной траектории движения нет встречного транспортного средства, блок 25 определения остановки встречного транспортного средства определяет, существует или нет встречное транспортное средство на дальней стороне, на основе информации о положении встречного транспортного средства. Когда блок 24 определения встречного транспортного средства определил, что существует встречное транспортное средство на дальней стороне, блок 25 определения остановки встречного транспортного средства определяет, остановилось ли это встречное транспортное средство на дальней стороне.
[0025] Когда блок 25 определения остановки встречного транспортного средства определил, что встречное транспортное средство на дальней стороне остановилось, выполняется определение в отношении того, было ли распознано действие пропускания, выполненное дальним встречным транспортным средством. Когда не может быть распознано действие пропускания этого встречного транспортного средства на дальней стороне, блок 25 определения остановки встречного транспортного средства определяет, остановилось ли соседнее встречное транспортное средство. Кроме того, когда блок 25 определения остановки встречного транспортного средства определил, что встречное транспортное средство на дальней стороне остановилось, выполняется определение того, есть ли светофор перед рассматриваемым транспортным средством, на основе информации о маршруте движения, полученной из навигационная система 15 и информации о периферии, полученной внешним датчиком 11. Когда выполняется определение того, что имеется светофор, выполняется определение относительно того, существует или нет распознавание того, что этот светофор находится в состоянии зеленого света.
[0026] В этом варианте осуществления «встречное транспортное средство на дальней стороне» обозначает первое транспортное средство среди встречных транспортных средств, присутствующих на дальней стороне, если смотреть со стороны рассматриваемого транспортного средства, относительно намеченной траектории движения, проходящей через полосу встречного движения. «Соседнее встречное транспортное средство» обозначает последнее транспортное средство среди встречных транспортных средств, присутствующих на ближней стороне, если смотреть со стороны рассматриваемого транспортного средства, относительно намеченной траектории движения, проходящей через полосу встречного движения, и обозначает встречное транспортное средство в положении, по существу, смежном с остановленным рассматриваемым транспортным средством. Другими словами, соседнее встречное транспортное средство располагается впереди намеченной траектории движения, а встречное транспортное средство на дальней стороне располагается сзади намеченной траектории движения. Кроме того, «действие пропускания» обозначает действие, выполняемое водителем встречного транспортного средства, побуждающее рассматриваемое транспортное средство продвигаться вперед, и представляет собой поведение, отображающее намерение водителя встречного транспортного средства уступить путь продвижения вперед рассматриваемому транспортному средству. Например, действие - это мигание фар, сигнал водителя и т.д. «Остановлено» в этом варианте осуществления означает, что скорость транспортного средства равна нулю.
[0027] Когда встречное транспортное средство на дальней стороне определено как остановившееся блоком 25 определения остановки встречного транспортного средства, и выполнено определение, что распознано действие пропускания, выполняемое встречным транспортным средством на дальней стороне, блок 26 разрешения поворота направо/налево разрешает движение для поворота направо рассматриваемым транспортным средством и выдает сигнал разрешения поворота направо. Когда встречное транспортное средство на дальней стороне определено как остановившееся, и соседнее встречное транспортное средство определено как остановившееся, то есть когда оба встречных транспортных средства спереди и сзади от намеченной траектории движения определены как остановившиеся, движение блок 26 разрешения поворота направо/налево разрешает движение для поворота направо рассматриваемым транспортным средством и выдает сигнал разрешения поворота направо.
[0028] Кроме того, когда определено, что впереди рассматриваемого транспортного средства находится светофор, и выполнено определение, что сигнал светофора распознается как находящийся в состоянии зеленого света, блок 26 разрешения поворота направо/налево определяет, было ли распознано действие пропускания или определяет соседнее встречное транспортное средство, которое должно быть остановлено, и выдает сигнал разрешения поворота направо/налево в соответствии с результатом. В частности, когда определено, что светофор находится впереди рассматриваемого транспортного средства, блок 26 разрешения поворота направо/налево не выводит сигнал разрешения поворота направо, если не было определено, что светофор распознается как находящийся в состоянии зеленого света.
[0029] Блок 26 разрешения поворота направо/налево разрешает движение для поворота направо рассматриваемого транспортного средства и выдает сигнал разрешения поворота направо, даже когда блок 24 определения встречного транспортного средства определил, что нет встречного транспортного средства на дальней стороне. Сигнал разрешения поворота направо вводится в блок 27 управления движением для поворота направо/налево.
[0030] Когда сигнал разрешения поворота направо вводится из блока 26 разрешения поворота направо/налево, блок 27 управления движением для поворота направо/налево выводит команду управления движением, которая предписывает рассматриваемому транспортному средству двигаться по намеченной траектории движения и выполнять движение для поворота направо через полосу встречного движения. Эта команда управления движением вводится в приводной механизм 16. В этом варианте осуществления скорость движения во время движения для поворота направо, когда определяется, что присутствует встречное транспортное средство на дальней стороне, устанавливается на регулируемую скорость, которая медленнее, чем предварительно установленная опорная скорость. Скорость движения во время движения для поворота направо, когда блок 24 определения встречного транспортного средства определил, что встречного транспортного средства на дальней стороне нет, устанавливается на предварительно установленную опорную скорость. Благодаря этой конфигурации скорость движения во время движения для поворота направо, когда блок 24 определения встречного транспортного средства определил, что присутствует встречное транспортное средство на дальней стороне, задается ниже, чем скорость движения во время движения для поворота направо, когда блок 24 определения встречного транспортного средства определил, что нет встречного транспортного средства на дальней стороне, и когда встречное транспортное средство на дальней стороне присутствует, движение для поворота направо выполняется медленнее, чем при отсутствии встречного транспортного средства на дальней стороне.
[0031] [Конфигурация процесса управления поворотом направо/налево]
Фиг.2 - блок-схема последовательности операций процесса управления поворотом направо/налево, выполняемого блоком управления движением транспортного средства первого варианта осуществления. Процесс управления поворотом направо/налево первого варианта осуществления описан ниже на основе фиг.2.
[0032] На этапе S1 выполняется определение относительно того, остановилось ли рассматриваемое транспортное средство с намеченным движением для поворота направо. Когда определением является ДА (остановка с намеченным поворотом направо), процесс переходит к этапу S2. Когда определением является НЕТ (не остановка с намеченным поворотом направо), определяется, что движение поворота направо не намечено, и этап S1 повторяется. На этом этапе определяется, намечено или нет движение для поворота направо, на основе намеченного маршрута движения, работает ли указатель поворота и т.д. Определение остановки выполняется на основе того, является ли скорость рассматриваемого транспортного средства нулевой, как обнаружено датчиком скорости транспортного средства.
[0033] На этапе S2, в продолжение определения на этапе S1, что встречное транспортное средство остановлено с намеченным поворотом направо, ищется намеченная траектория движения для рассматриваемого транспортного средства во время поворота направо, и выполняется определение, отсутствует ли на этой намеченной траектории движения встречное транспортное средство. Когда определением является ДА (нет встречного транспортного средства), процесс переходит к этапу S3. Когда определением является НЕТ (имеется встречное транспортное средство), существует возможность помешать движению встречного транспортного средства по намеченной траектории движения, если будет выполнено движение для поворота направо, и поэтому процесс переходит к этапу S13 при условии, что движение для поворота направо не может быть разрешено. В этом варианте осуществления, существует или нет встречное транспортное средство, определяется из информации о положении встречного транспортного средства, полученной на основе информации о периферии от внешнего датчика 11.
[0034] На этапе S3, в продолжение определения на этапе S2, что на намеченной траектории движения нет встречного транспортного средства, выполняется определение того, существует ли светофор для рассматриваемого транспортного средства, впереди рассматриваемого транспортного средства. Когда определением является ДА (есть светофор), процесс переходит к этапу S4. Когда определением является НЕТ (светофор отсутствует), процесс переходит к этапу S5. Наличие или отсутствие светофора для рассматриваемого транспортного средства определяется, в частности, на основании информации о периферии, полученной внешним датчиком 11.
[0035] На этапе S4, в продолжение определения на этапе S3 наличия светофора для рассматриваемого транспортного средства, выполняется определение относительно того, может ли этот светофор быть распознан как находящийся в состоянии зеленого света. Когда определением является ДА (распознается состояние зеленого света), процесс переходит к этапу S5. Когда определением является НЕТ (состояние зеленого света не распознано), рассматриваемое транспортное средство должно остановиться, и поэтому процесс переходит к этапу S13, исходя из того, что движение для поворота направо не может быть разрешено. В этом варианте осуществления состояние света светофора распознается на основе информации о периферии, полученной внешним датчиком 11.
[0036] На этапе S5, в продолжение определения на этапе S3 отсутствия светофора для рассматриваемого транспортного средства или определения на этапе S4, что состояние зеленого света распознано, выполняется определение относительно того, присутствует ли встречное транспортное средство на дальней стороне. Когда определением является ДА (присутствует встречное транспортное средство на дальней стороне), процесс переходит к этапу S6. Когда определением является НЕТ (нет встречного транспортного средства на дальней стороне), процесс переходит к этапу S11. В этом варианте осуществления «встречное транспортное средство на дальней стороне» обозначает транспортное средство на полосе встречного движения, расположенное на дальней стороне от намеченной траектории движения. Наличие или отсутствие встречного транспортного средства на дальней стороне определяется из информации о положении встречного транспортного средства, полученной на основе информации о периферии от внешнего датчика 11.
[0037] На этапе S6, в продолжение определения на этапе S5, что существует встречное транспортное средство на дальней стороне, выполняется определение в отношении того, остановилось ли встречное транспортное средство на дальней стороне, при условии, что намеченная траектория движения встречного транспортного средства на дальней стороне и намеченная траектория движения рассматриваемого транспортного средства пересекаются. Когда определением является ДА (встречное транспортное средство на дальней стороне остановлено), процесс переходит к этапу S7. Когда определено НЕТ (встречное транспортное средства на дальней стороне движется), встречное транспортное средство на дальней стороне не остановилось, и существует возможность помешать движению встречного транспортного средства на дальней стороне, если будет выполнено движение для поворота направо, и процесс переходит к этапу S13, исходя из того, что движение для поворота направо не может быть разрешено. В этом варианте осуществления то, остановилось или нет встречное транспортное средство на дальней стороне, определяется из информации о положении встречного транспортного средства, полученной на основе информации о периферии от внешнего датчика 11.
[0038] На этапе S7, в продолжение определения на этапе S6 того, что встречное транспортное средство на дальней стороне остановилось, выполняется определение относительно того, распознано ли действие пропускания встречным транспортным средством на дальней стороне, которое было определено на этапе S5 как присутствующее. Когда определением является ДА (распознано действие пропускания), процесс переходит к этапу S9. Когда определением является НЕТ (действие пропускания не распознано), процесс переходит к этапу S8. В этом варианте осуществления, существует или нет распознавание действия пропускания, определяется на основе информации о периферии, полученной внешним датчиком 11.
[0039] На этапе S8, в продолжение определения на этапе S7, что нет распознавания действия пропускания встречным транспортным средством на дальней стороне, выполняется определение того, остановилось ли соседнее встречное транспортное средство, исходя из того, что неясно, будет ли встречное транспортное средство на дальней стороне продолжать оставаться в остановленном состоянии. Когда определением является ДА (соседнее встречное транспортное средство остановлено), процесс переходит к этапу S9. Если выбрано НЕТ (соседнее встречное транспортное средство не остановлено), существует вероятность, что встречное транспортное средство на дальней стороне будет отправлено в движение, а также возможность помешать движению встречного транспортного средства на дальней стороне, если движение для поворота направо будет выполняется, и процесс переходит к этапу S13, исходя из того, что движение для поворота направо не может быть разрешено. В этом варианте осуществления «соседнее встречное транспортное средство» представляет собой транспортное средство на полосе встречного движения, присутствующее на ближней стороне от намеченной траектории движения. Существует или нет соседнее встречное транспортное средство, определяется из информации о положении встречного транспортного средства, полученной на основе информации о периферии от внешнего датчика 11. Определение «соседнее встречное транспортное средство не остановлено» выполняется не только тогда, когда соседнее встречное транспортное средство движется, но также и когда соседнего встречного транспортного средства нет.
[0040] На этапе S9, в дополнение к определению на этапе S7, что существует распознавание действия пропускания встречным транспортным средством на дальней стороне, или определению на этапе S8, что соседнее встречное транспортное средство остановилось, сигнал разрешения поворота направо выводится, и процесс переходит к этапу S10, исходя из того, что остановленное состояние встречного транспортного средства на дальней стороне будет продолжаться, и возможно движение для поворота направо.
[0041] На этапе S10, в продолжение вывода сигнала разрешения поворота направо на этапе S9, выводится команда управления движением, которая вызывает выполнение движения для поворота направо через полосу встречного движения, и процесс переходит к END. Благодаря этому действию рассматриваемое транспортное средство движется по намеченной траектории движения, и движение для поворота направо выполняется посредством автономного вождения. В это время, чтобы знать о слепых зонах, создаваемых остановкой встречного транспортного средства на дальней стороне, скорость движения во время движения для поворота направо устанавливается на регулируемую скорость (например, около 5 км/ч), которая ниже чем предварительно установленная опорная скорость.
[0042] На этапе S11, в продолжение определения на этапе S5, что нет встречного транспортного средства на дальней стороне, выдается сигнал разрешения поворота направо, и процесс переходит к этапу S12, исходя из того, что ничто не вызывает помех для движения для поворота направо рассматриваемого транспортного средства и движение для поворота направо возможно.
[0043] На этапе S12, в продолжение вывода сигнала разрешения поворота направо на этапе S11, выводится команда управления движением, которая вызывает выполнение движения для поворота направо через полосу встречного движения, и процесс переходит к END. Благодаря этому действию рассматриваемое транспортное средство движется по намеченной траектории движения, и движение для поворота направо выполняется посредством автономного вождения. В настоящее время слепая зона не создается, поскольку нет встречного транспортного средства на дальней стороне; поэтому скорость движения во время движения для поворота направо устанавливается на предварительно установленную опорную скорость (например, около 10 км/ч), и регулирование скорости не выполняется.
[0044] На этапе S13, в продолжение определения на этапе S2, что встречное транспортное средство присутствует на намеченной траектории движения, определения на этапе S4, что распознается состояние без зеленого света, определения на этапе S6, что встречное транспортное средство на дальней стороне движется, или определения на этапе S8, что соседнее встречное транспортное средство не остановилось, управление вождением для рассматриваемого транспортного средства устанавливается на ручное вождение водителем, исходя из того, что движение для поворота направо не может быть разрешено, и процесс продвигается к END. В этом варианте осуществления «ручное вождение» может обозначать вождение, при котором рулевое управление и управление ускорением рассматриваемого транспортного средства выполняются посредством операции со стороны водителя, или может обозначать вождение, в котором рулевое управление рассматриваемым транспортным средством выполняется посредством автономного вождения на основе команды управления движением, а управление ускорением выполняется операцией со стороны водителя. Другими словами, «автономное вождение» в первом варианте осуществления означает, что без какой-либо зависимости от операции со стороны водителя рулевое управление и управление ускорением рассматриваемого транспортного средства выполняются посредством действий приводного механизма 16 на основе команды управления движением и «ручное вождение» означает, что рулевое управление и управление ускорением рассматриваемого транспортного средства выполняются по меньшей мере с одной из операций со стороны водителя.
[0045] Далее будет описано действие. Сначала будет описан поток управления поворотом направо/налево в сравнительном примере и проблемы, связанные с ним, и действие разрешения поворота направо/налево в способе и устройстве определения поворота направо/налево для транспортного средства с содействием вождению по первому варианту осуществления будет описано далее.
[0046] [Поток управления поворотом направо/налево в сравнительном примере и проблемы с ним]
Фиг.3 - блок-схема последовательности операций управления поворотом направо/налево в сравнительном примере. На фиг.4 показана схема ситуации на перекрестке, в которой рассматриваемое транспортное средство находится в остановленном состоянии с намерением поворота направо. Поток управления поворотом направо/налево в сравнительном примере и проблемы с ним описаны ниже на основе фиг.3 и 4.
[0047] Когда рассматриваемое транспортное средство 31 поворачивает направо через полосу 33 встречного движения на перекрестке и т.д., как показано на фиг. 4, движущееся прямо встречное транспортное средство (встречное транспортное средство 34 на дальней стороне) является так называемым главным транспортным средством, и, как правило, рассматриваемое транспортное средство 31 не должно препятствовать движению вперед этого встречного транспортного средства 34 на дальней стороне.
[0048] Ввиду этого в процессе управления поворотом направо/налево сравнительного примера управление поворотом направо/налево выполняется согласно последовательности операций, показанной на блок-схеме последовательности операций на фиг.3. В частности, на этапе S100 выполняется определение относительно того, является ли остановка рассматриваемого транспортного средства 31 остановкой с намерением поворота направо. Когда определением является ДА (намечен поворот направо), процесс переходит к этапу S101. Когда определением является НЕТ (поворот направо не намечен), этап S100 повторяется при условии, что движение для поворота направо не намечено.
[0049] На этапе S101, в продолжение определения на этапе S100, что рассматриваемое транспортное средство остановилось с намеченным поворотом направо, ищется намеченная траектория 35 движения для рассматриваемого транспортного средства 31 во время поворота направо, и выполняется определение относительно того, есть или нет встречное транспортное средство на намеченной траектории 35 движения. Когда определением является ДА (нет встречного транспортного средства), процесс переходит к этапу S102. Если определением является НЕТ (имеется встречное транспортное средство), существует возможность помешать движению встречного транспортного средства, если будет выполнено движение для поворота направо, и поэтому процесс переходит к RETURN, исходя из того, что движение для поворота направо не может быть разрешено.
[0050] На этапе S102, в продолжение определения на этапе S101 отсутствия встречного транспортного средства на намеченной траектории 35 движения, выполняется определение того, существует или нет встречное транспортное средство 34 на дальней стороне. Если определением является ДА (имеется встречное транспортное средство на дальней стороне), процесс переходит к RETURN, исходя из того, что движение для поворота направо не может быть разрешено. Когда определением является НЕТ (нет встречного транспортного средства на дальней стороне), процесс переходит к этапу S103.
[0051] На этапе S103, в продолжение определения на этапе S102 того, что нет встречного транспортного средства 34 на дальней стороне, выводится сигнал разрешения поворота направо, и процесс переходит к этапу S104, исходя из того, что ничто не вызывает помех с поворотом направо рассматриваемого транспортного средства 31 и движения для поворота направо возможно.
[0052] На этапе S104, в продолжение вывода сигнала разрешения поворота направо на этапе S103, выводится команда управления движением, которая вызывает выполнение движения для поворота направо через полосу 33 встречного движения, и процесс переходит к END.
[0053] Вследствие этой конфигурации разрешается поворот направо, и движение для поворота направо через полосу 33 встречного движения посредством автономного вождения возможно только в том случае, если на дальней стороне намеченной траектории 35 движения нет встречного транспортного средства 34 на дальней стороне. Следовательно, в сценарии, в котором имеется встречное транспортное средство 34 на дальней стороне, как показано на фиг.4, рассматриваемое транспортное средство 31 остается остановленным до тех пор, пока встречное транспортное средство 34 на дальней стороне полностью не проедет мимо.
[0054] В отличие от этого, недавно стала известна технология в области автономного вождения, в которой, когда встречное транспортное средство собирается повернуть направо на перекрестке, путь продвижения вперед уступается встречному транспортному средству (встречному транспортному средству разрешено выполнять движение для поворота направо до того, как рассматриваемое транспортное средство движется прямо вперед), благодаря чему предотвращаются задержки в рассматриваемой полосе движения и полосе встречного движения, и достигается среда с плавным движением.
[0055] В частности, раскрыта технология, в которой рассматриваемое транспортное средство останавливается в пределах перекрестка, чтобы не мешать движению встречного транспортного средства, которое въезжает на перекресток с поворотом направо. Также раскрыта технология, в которой передний дисплей, подсказывающий встречному транспортному средству поворачивать направо, выполняется, когда определено, что рассматриваемое транспортное средство остановится в перекрестке.
[0056] Однако эти технологии относятся к стороне, которая уступает путь продвижения вперед встречному транспортному средству, планирующему поворот направо, при этом еще не была раскрыта какая-либо технология для стороны уступки (сторона поворачивающая направо) не была раскрыта. Другими словами, когда рассматриваемое транспортное средство 31 остановилось с намеченным движением для поворота направо, как показано, например, на фиг.4, и встречное транспортное средство 34 на дальней стороне останавливается, чтобы уступать путь продвижения вперед рассматриваемому транспортному средству 31, желательно, чтобы рассматриваемое транспортное средство 31 выполняло движение для поворота направо по намеченной траектории 35 движения, чтобы предотвратить задержку для следующего транспортного средства 32 позади рассматриваемого транспортного средства 31 или задержку на полосе 33 встречного движения.
[0057] Однако, в процессе управления поворотом направо/налево сравнительного примера, показанного на фиг.3, поворот направо разрешается, когда нет встречного транспортного средства 34 на дальней стороне (главного транспортного средства), и поэтому рассматриваемое транспортное средство 31 остается остановленным, пока встречное транспортное средство 34 на дальней стороне полностью не проедет мимо. Как результат, существует возможность вызвать задержку в рассматриваемой полосе 30 движения и полосе 33 встречного движения.
[0058] [Действие разрешения поворота направо/налево]
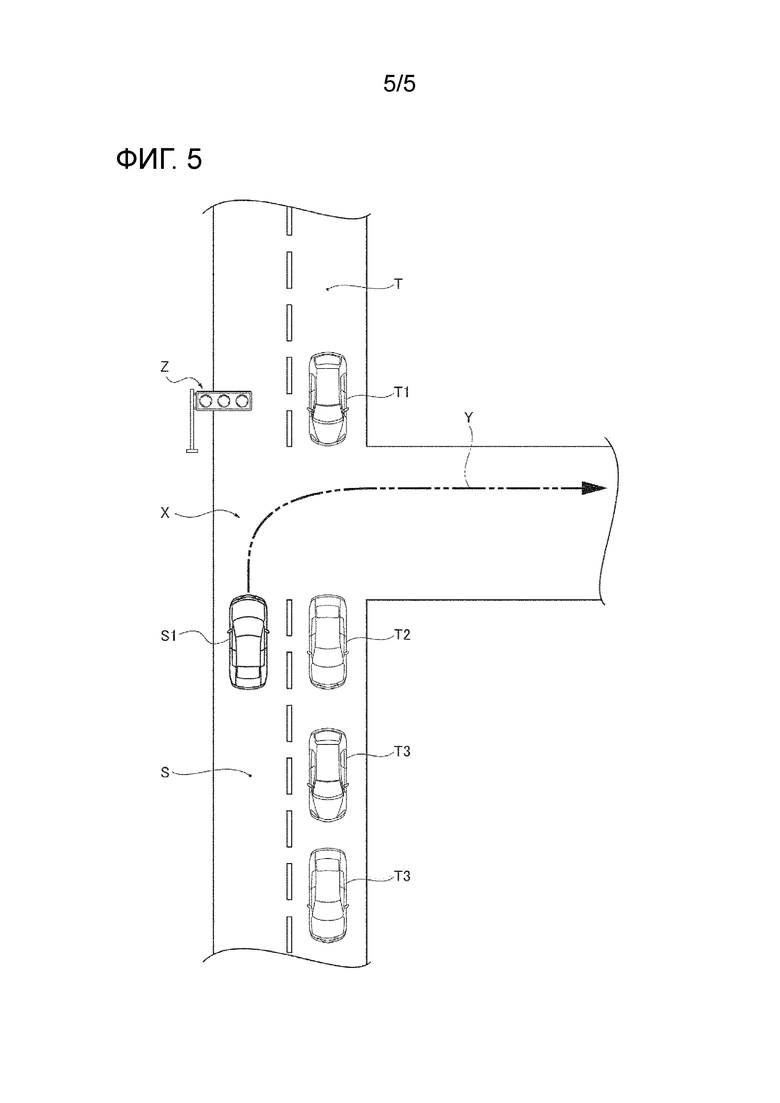
Фиг.5 представляет собой диаграмму ситуации на перекрестке, в котором транспортное средство с содействием вождению, к которому применяется способ определения поворота направо/налево по первому варианту осуществления, находится в остановленном состоянии с намерением поворота направо. Действие разрешения поворота направо первого варианта осуществления описано ниже со ссылкой на фиг.2 и 5.
[0059] Как показано на фиг.5, представлен случай, в котором транспортное средство с содействием вождению (называемое ниже «рассматриваемым транспортным средством S1»), способное к автономному вождению, в котором способ определения поворота направо/налево первого варианта осуществления был применен, поворачивает направо на перекрестке X по намеченной траектории Y движения.
[0060] На этапе S1 блок-схемы последовательности операций, показанной на фиг.2, выполняется определение того, остановилось ли рассматриваемое транспортное средство S1 с намеченным движением для поворота направо. В случае, показанном на фиг. 5, транспортное средство остановилось с намеченным движением для поворота направо; следовательно, процесс переходит к этапу S2, и делается определение относительно того, нет ли встречного транспортного средства на намеченной траектории Y движения.
[0061] На фиг.5 нет встречного транспортного средства на намеченной траектории Y движения, потому что на перекрестке X не остановлено транспортное средство. Следовательно, процесс переходит к этапу S3. Когда встречное транспортное средство находится на намеченной траектории Y движения, процесс переходит к этапу S13, так что не будет никаких помех с движением встречного транспортного средства, вождение устанавливается на ручное управление, и вождение поручается водителю.
[0062] На этапе S3 выполняется определение относительно того, существует ли светофор Z впереди рассматриваемого транспортного средства S1, и на этапе S4 выполняется определение относительно того, находится ли этот светофор Z в состоянии зеленого света. В частности, если есть светофор Z в состоянии зеленого света, процесс переходит с этапа S3 на этап S4 на этап S5. В частности, на перекрестке без светофора Z процесс переходит от этапа S3 к этапу S5. В случае, когда есть светофор Z, но не в состоянии зеленого света (то есть, когда светофор Z горит желтым или красным), рассматриваемое транспортное средство S1 должно остановиться; следовательно, процесс переходит от этапа S4 к этапу S13, вождение устанавливается на ручное управление, и вождение поручается водителю.
[0063] В отличие от этого, в случае, показанном на фиг.5, поскольку светофор Z находится в состоянии зеленого света, процесс переходит от этапа S3 к этапу S4, к этапу S5, и определяется, существует или нет встречное транспортное средство Т1 на дальней стороне. В случае, показанном на фиг.5, на дальней стороне намеченной траектории Y движения находится встречное транспортное средство T1 на дальней стороне. Следовательно, процесс переходит с этапа S5 на этап S6, и делается определение того, действительно ли встречное транспортное средство T1 на дальней стороне остановилось.
[0064] В случае, показанном на фиг.5, в полосе встречного движения T имеется задержка, и соседнее встречное транспортное средство T2 на ближней стороне от намеченной траектории Y движения остановилось, как и транспортное средство T3 впереди этого соседнего встречного транспортного средства Т2. Следовательно, встречное транспортное средство T1 на дальней стороне также останавливается без движения вперед. Вследствие этих действий определяется, что встречное транспортное средство T1 на дальней стороне остановлено, и процесс переходит от этапа S6 к этапу S7. Когда встречное транспортное средство T1 на дальней стороне не остановилось, процесс переходит от этапа S6 к этапу S13, вождение устанавливается на ручное управление, и вождение поручается водителю, при условии, что существует вероятность помех с движением встречного транспортного средства T1 на дальней стороне, если рассматриваемое транспортное средство S1 поворачивает направо.
[0065] Когда процесс переходит к этапу S7, выполняется определение в отношении того, было ли распознано действие пропускания встречным транспортным средством T1 на дальней стороне. Когда может быть определено, что действие пропускания было распознано, процесс переходит от этапа S7 к этапу S9, к этапу S10, выводится сигнал разрешения поворота направо и выполняется движение для поворота направо рассматриваемого транспортного средства S1, исходя из того, что водитель встречного транспортного средства T1 на дальней стороне намеревается отдать приоритет движения для поворота направо рассматриваемого транспортного средства S1. Когда не может быть определено, что распознано действие пропускания встречным транспортным средством T1 на дальней стороне, процесс переходит к этапу S8, и выполняется определение относительно того, остановилось ли соседнее встречное транспортное средство T2.
[0066] Если соседнее встречное транспортное средство T2 остановилось, как показано на фиг.5, встречное транспортное средство T1 на дальней стороне, неспособное выехать, поддерживает остановленное состояние; следовательно, процесс переходит от этапа S9 к этапу S10, выводится сигнал разрешения поворота направо и выполняется движение для поворота направо рассматриваемого транспортного средства S1 посредством автоматического движения. Когда соседнее встречное транспортное средство T2 отправляется в движение или когда нет соседнего встречного транспортного средства T2, процесс переходит к этапу S13, вождение устанавливается на ручное, и вождение поручается водителю, при условии, что существует вероятность того, что встречное транспортное средство T1 на дальней стороне начнет движение и въедет на перекресток.
[0067] Кроме того, в отличие от случая, показанного на фиг.5, когда нет встречного транспортного средства T1 на дальней стороне, процесс переходит от этапа S5, к этапу S11, к этапу S12, выводится сигнал разрешения поворота направо и движение для поворота направо рассматриваемого транспортного средства S1 выполняется с помощью автоматического движения.
[0068] Таким образом, в способе определения поворота направо/налево по первому варианту осуществления должно быть встречное транспортное средство T1 на дальней стороне на дальней стороне от намеченной траектории Y движения, когда рассматриваемое транспортное средство S1 остановилось с намеченным движением для поворота направо, определяется остановленное состояние встречного транспортного средства T1 на дальней стороне, и движение для поворота направо рассматриваемого транспортного средства S1 может быть разрешено, когда встречное транспортное средство T1 на дальней стороне остановилось.
[0069] Из-за этой конфигурации может быть надлежащим образом выполнено определение, разрешающее движение для поворота направо/налево через полосу встречного движения T, и когда встречное транспортное средство T1 на дальней стороне уступает путь продвижения вперед рассматриваемому транспортному средству S1, движение для поворота направо рассматриваемого транспортного средства S1 может быть выполнено, даже если встречное транспортное средство T1 на дальней стороне является главным транспортным средством. Следовательно, ненужная остановка рассматриваемого транспортного средства S1 может быть устранена, и задержки в рассматриваемой полосе S движения и в полосе T встречного движения могут быть предотвращены.
[0070] В первом варианте осуществления сигнал разрешения поворота направо выдается, когда встречное транспортное средство T1 на дальней стороне остановилось, и распознано действие пропускания встречным транспортным средством T1 на дальней стороне. В частности, сигнал разрешения поворота направо выводится не только тогда, когда подтверждено, что T1 остановилось, но также после того, как было подтверждено поведение, отображающее намерение уступить путь продвижения вперед водителя встречного транспортного средства T1 на дальней стороне. Таким образом, становится возможным более точно определить намерение встречного транспортного средства T1 на дальней стороне уступить путь продвижения вперед рассматриваемому транспортному средству S1 и определить, что поворот направо может быть разрешен.
[0071] Когда соседнее встречное транспортное средство T2 остановилось в случае, когда встречное транспортное средство T1 на дальней стороне остановилось, но действие пропускания встречным транспортным средством T1 на дальней стороне не может быть распознано, выводится сигнал разрешения поворота направо. В частности, сигнал разрешения поворота направо выводится не только тогда, когда подтверждается остановка встречного транспортного средства T1 на дальней стороне, но также и после подтверждения того, что встречное транспортное средство T1 на дальней стороне будет оставаться остановленным. Таким образом, можно надлежащим образом определить, что остановленное состояние встречного транспортного средства T1 на дальней стороне будет продолжаться, и выполнять определение о разрешении поворота направо.
[0072] Кроме того, в первом варианте осуществления сигнал разрешения поворота направо выводится, когда перед рассматриваемым транспортным средством S1 находится светофор Z и распознается состояние зеленого света этого светофора Z. Таким образом, может быть надлежащим образом выполнено определение о разрешении движения для поворота направо в соответствии со светофором Z, расположенным перед рассматриваемым транспортным средством S1.
[0073] В этом первом варианте осуществления сигнал разрешения поворота направо выводится даже тогда, когда встречное транспортное средство T1 на дальней стороне остановилось, и когда выполняется движение для поворота направо через полосу встречного движения T, скорость движения во время движения для поворота направо устанавливается на регулируемую скорость, которая ниже, чем предварительно установленная опорная скорость. Сигнал разрешения поворота направо выводится, когда нет встречного транспортного средства T1 на дальней стороне, и когда выполняется движение для поворота направо через полосу встречного движения T, скорость движения во время движения для поворота направо устанавливается на предварительно установленную опорную скорость. Благодаря этой конфигурации рассматриваемое транспортное средство может двигаться, зная о слепой зоне, создаваемой встречным транспортным средством T1 на дальней стороне; например, будучи осведомленным о присутствии двухколесного транспортного средства, въезжающего на перекресток X через слепую зону, созданную встречным транспортным средством T1 на дальней стороне.
[0074] В этом первом варианте осуществления, в случаях, когда встречное транспортное средство находится на намеченной траектории Y движения, встречное транспортное средство T1 на дальней стороне движется, светофор Z находится в состоянии без зеленого света, или соседнее встречное транспортное средство T2 находится в неостановленном состоянии, процесс переходит к этапу S13, и вождение устанавливается на ручное вождение, которое должен выполнять водитель, занимающий рассматриваемое транспортное средство S1. Благодаря этим действиям движение для поворота направо рассматриваемого транспортного средства S1 поручается вождению со стороны водителя, и движение для поворота направо может выполняться в соответствии с определением водителя.
[0075] Далее должны быть описаны эффекты. Эффекты, представленные ниже, достигаются с помощью способа и устройства определения поворота направо-налево для транспортного средства с содействием вождению по первому варианту осуществления.
[0076] (1) Этот способ определения поворота направо-налево для транспортного средства с содействием вождению, которое содержит бортовой датчик (внешний датчик 11, внутренний датчик 12), который получает информацию о периферии рассматриваемого транспортного средства S1 и информацию о рассматриваемом транспортном средстве, и контроллер (блок 22 управления движением транспортного средства), который выполняет определение разрешения для движения для поворота направо/налево через полосу встречного движения T на основе информации, полученной бортовым датчиком (внешний датчик 11, внутренний датчик 12), сконфигурирован так, что:
выполняется определение в отношении того, остановилось ли рассматриваемое транспортное средство S1 с намеченным движением для поворота направо/налево (этап S1);
когда определение остановки поворота направо/налево выполняется для рассматриваемого транспортного средства S1, выполняется определение в отношении того, имеется ли встречное транспортное средство на намеченной траектории Y движения рассматриваемого транспортного средства S1 (этап S2);
когда определяется, что встречное транспортное средство не присутствует на намеченной траектории Y движения, выполняется определение того, остановилось ли встречное транспортное средство T1 на дальней стороне в полосе встречного движения T, которое находится на дальней стороне от намеченной траектории Y движения (этап S5, этап S6); и
когда определяется, что встречное транспортное средство T1 на дальней стороне остановилось, движение для поворота налево/направо разрешается (этап S9).
Таким образом, можно надлежащим образом выполнить определение того, разрешать ли поворот направо/налево через полосу встречного движения T.
[0077] (2) Этот способ также сконфигурирован так, что: когда выполняется определение того, что встречное транспортное средство T1 на дальней стороне остановилось, выполняется определение в отношении того, остановилось ли соседнее встречное транспортное средство T2 в полосе встречного движения T, присутствующее на ближней стороне от намеченной траектории Y движения (этап S8); и
когда определено, что соседнее встречное транспортное средство T2 остановилось, движение для поворота направо/налево разрешается (этап S9).
Таким образом, возможно, в дополнение к эффекту (1), надлежащим образом определить уступку пути продвижения вперед рассматриваемому транспортному средству S1 встречным транспортным средством T1 на дальней стороне и определить разрешение поворота направо.
[0078] (3) Этот способ также сконфигурирован так, что: когда выполняется определение, что встречное транспортное средство T1 на дальней стороне остановилось, выполняется определение в отношении того, распознано или нет действие пропускания встречным транспортным средством T1 на дальней стороне (этап S7); и
когда действие пропускания было распознано, движение для поворота направо/налево разрешается (этап S9).
В дополнение к эффекту (1), таким образом, можно более точно определить намерение встречного транспортного средства T1 на дальней стороне уступить путь продвижения вперед рассматриваемому транспортному средству S1 и определить разрешение поворота направо.
[0079] (4) Этот способ также сконфигурирован так, что: когда выполняется определение, что встречное транспортное средство T1 на дальней стороне остановилось, выполняется определение в отношении того, присутствует ли светофор Z перед рассматриваемым транспортным средством S1 (этап S3);
когда определено, что светофор Z присутствует, определяется, было ли распознано состояние зеленого света светофора Z (этап S4); и
когда состояние зеленого света было распознано, движение для поворота направо/налево разрешается (этап S9).
В дополнение к эффектам любого из (1) - (3), таким образом, можно надлежащим образом выполнить определение, чтобы разрешить движение для поворота направо в соответствии со светофором Z, расположенным перед рассматриваемым транспортным средством S1.
[0080] (5) Этот способ также сконфигурирован так, что: рассматриваемое транспортное средство S1 является транспортным средством с автономным приводом, в котором движение для поворота налево/направо выполняется автоматически на основе сигнала от контроллера (блок 22 управления движением транспортного средства); и
когда определено, что разрешено движение для поворота направо/налево, то движение для поворота направо/налево выполняется автоматически, и скорость движения во время движения для поворота направо/налево, когда присутствует встречное транспортное средство T1 на дальней стороне, устанавливается ниже, чем скорость движения во время движения для поворота направо/налево, когда встречное транспортное средство T1 на дальней стороне отсутствует.
Таким образом, становится возможным выполнять движение с осознанием о слепой зоне, создаваемой встречным транспортным средством T1 на дальней стороне, во время движения для поворота направо/налево.
(6) Это устройство определения поворота направо-налево для транспортного средства с содействием вождению, которое содержит бортовой датчик (внешний датчик 11, внутренний датчик 12), который получает информацию о периферии рассматриваемого транспортного средства S1 и информацию о рассматриваемом транспортном средстве, и контроллер (блок 22 управления движением транспортного средства), который выполняет определение разрешения для движения для поворота направо/налево через полосу встречного движения T на основе информации, полученной бортовым датчиком (внешний датчик 11, внутренний датчик 12), сконфигурировано так, что
контроллер (блок 22 управления движением транспортного средства) содержит:
блок 23 определения остановки рассматриваемого транспортного средства, который определяет, остановилось ли рассматриваемое транспортное средство S1 с намеченным движением для поворота направо/налево;
блок 24 определения встречного транспортного средства, который определяет, существует или нет встречное транспортное средство на намеченной траектории Y движения рассматриваемого транспортного средства S1, когда рассматриваемое транспортное средство S1 определяется блоком 23 определения остановки рассматриваемого транспортного средства как остановившееся с намеченным движением для поворота направо/налево;
блок 25 определения остановки встречного транспортного средства, который определяет, остановилось ли встречное транспортное средство T1 на дальней стороне на полосе встречного движения T, присутствующее на дальней стороне от намеченной траектории Y движения, когда встречное транспортное средство определяется блоком 24 определения встречного транспортного средства как отсутствующее на намеченной траектории Y движения; и
блок 26 разрешения поворота направо/налево, который разрешает движение для поворота направо/налево, когда встречное транспортное средство T1 на дальней стороне определяется блоком 25 определения остановки встречного транспортного средства как остановившееся.
Таким образом, можно соответствующим образом выполнить определение, чтобы разрешать движения для поворота направо/налево через полосу встречного движения T.
[0082] Способ и устройство определения поворота направо-налево для транспортного средства с содействием вождению в соответствии с настоящим изобретением были описаны выше на основе первого варианта осуществления, но этот пример не предоставляется в качестве ограничения конкретной конфигурации; модификации, дополнения и другие изменения в конструкции допускаются при условии, что они не отклоняются от объема изобретения, как в формуле изобретения.
[0083] В первом варианте осуществления был представлен пример, в котором, в дополнение к выполняемому определению остановки для встречного транспортного средства T1 на дальней стороне, распознается действие пропускания, выполняемое встречным транспортным средством T1 на дальней стороне, или определение разрешения поворота направо выполняется, когда соседнее встречное транспортное средство T2 определяется как остановившееся. Другими словами, в первом варианте осуществления поворот направо не допускается просто из-за того, что встречное транспортное средство T1 на дальней стороне определено как остановившееся. Однако этот пример не приведен в качестве ограничения. Например, поворот направо может быть разрешен в момент, когда определяется, что встречное транспортное средство T1 на дальней стороне остановилось. Кроме того, изобретение может быть сконфигурировано так, что поворот направо не разрешен, если не определено, что соседнее встречное транспортное средство T2 остановилось, независимо от того, существует ли определение, что действие пропускания было распознано. Альтернативно, изобретение может быть сконфигурировано так, что поворот направо не разрешен, если действие пропускания встречного транспортного средства T1 на дальней стороне не распознается, независимо от того, существует или нет определение остановки для соседнего встречного транспортного средства T2.
[0084] Другими словами, изобретение может быть сконфигурировано так, чтобы разрешение поворота направо выполнялось в соответствии с результатом определения остановки для встречного транспортного средства T1 на дальней стороне, или изобретение может быть сконфигурировано так, чтобы определение выполняется только в отношении того, было ли распознано действие пропускания после того, как встречное транспортное средство Т1 на дальней стороне остановилось, и разрешение поворота направо выполняется в соответствии с этим результатом определения. Кроме того, изобретение может быть сконфигурировано так, что после определения остановки для встречного транспортного средства T1 на дальней стороне определяется только то, что соседнее встречное транспортное средство остановилось, и разрешение поворота направо выполняется в соответствии с этим результатом определения .
[0085] Изобретение также может быть сконфигурировано так, чтобы определение разрешения поворота направо выполнялось без выполнения определения того, имеется ли светофор Z перед рассматриваемым транспортным средством S1 или есть или нет распознавание состояния зеленого света светофора Z.
[0086] В первом варианте осуществления был представлен пример, в котором, когда выполняется определение разрешения поворота направо, выводится команда управления движением и выполняется движение для поворота направо посредством автономного вождения, и когда определение разрешения поворота направо не выполняется, вождение устанавливается на ручное. Тем не менее, этот пример не предоставляется в качестве ограничения; например, в тех случаях, когда изобретение применяется к транспортному средству, не оборудованному функцией автономного вождения, после того, как определение разрешения поворота направо выполнено, водитель может быть уведомлен о результате определения с помощью звука, дисплея, голоса и т.д., указывающих, что поворот направо разрешен.
[0087] В первом варианте осуществления был представлен пример, в котором, когда рассматриваемое транспортное средство S1 планирует движение для поворота направо на перекрестке X, выполняется определение разрешения для этого поворота направо. Однако сценарии, в которых выполняется определение поворота направо/налево, не ограничиваются этим примером. Например, изобретение может быть применено к сценарию, такому как, когда рассматриваемое транспортное средство пересечет полосу встречного движения, чтобы въехать на стоянку и т.д., смежную с полосой встречного движения.
[0088] В первом варианте осуществления был представлен пример сценария, в котором левостороннее движение используется в качестве эталона, и движение для поворота направо выполняется через полосу встречного движения. Однако этот вариант осуществления не предоставляется в качестве ограничения; способ определения поворота направо/налево настоящего изобретения также может применяться к случаю правостороннего движения в сценарии, включающем движение налево через полосу встречного движения. Другими словами, способ определения поворота направо/налево и устройство определения поворота направо/налево настоящего изобретения могут применяться в случае движения для поворота направо/налево через полосу встречного движения.
Изобретение относится к транспортным средствам. В способе определения поворота направо/налево для транспортного средства с содействием вождению определяют, остановилось ли рассматриваемое транспортное средство с намеченным движением для поворота направо/налево. Определяют, есть ли встречное транспортное средство на намеченной траектории движения рассматриваемого транспортного средства, когда выполняется определение остановки поворота направо/налево. Затем определяют, остановилось ли встречное транспортное средство на дальней стороне, которое является первым транспортным средством на полосе встречного движения, когда определяется, что встречное транспортное средство не присутствует на намеченной траектории движения. Разрешают движение для поворота направо/налево, когда встречное транспортное средство определено как остановившееся в то время, как рассматриваемое транспортное средство остановилось с намеченным движением для поворота направо/налево, и выполняют поворот. Расширяются функциональные возможности. 2 н. и 4 з.п. ф-лы, 5 ил.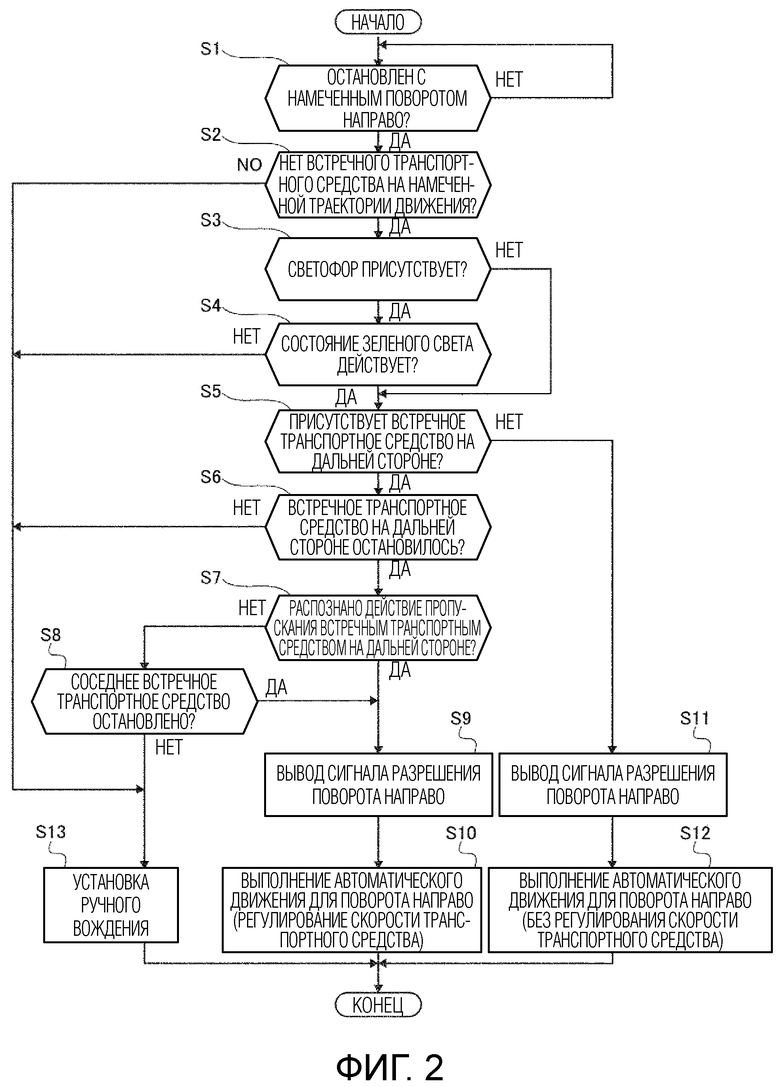
1. Способ определения поворота направо/налево для транспортного средства с содействием вождению, содержащего бортовой датчик, который получает информацию о периферии рассматриваемого транспортного средства и информацию о рассматриваемом транспортном средстве, и контроллер, который выполняет определение разрешения для движения для поворота направо/налево через полосу встречного движения во время остановки, при которой намечено движение для поворота направо/налево на основе информации, полученной бортовым датчиком,
причем способ определения поворота направо/налево для транспортного средства с содействием вождению характеризуется этапами, на которых:
определяют, остановилось ли рассматриваемое транспортное средство с намеченным движением для поворота направо/налево;
определяют, имеется или нет встречное транспортное средство на намеченной траектории движения рассматриваемого транспортного средства, когда для рассматриваемого транспортного средства выполняется определение остановки поворота направо/налево;
определяют, остановилось ли встречное транспортное средство на дальней стороне, которое является первым транспортным средством на полосе встречного движения, когда определяется, что встречное транспортное средство не присутствует на намеченной траектории движения; и
разрешают движение для поворота направо/налево, когда встречное транспортное средство на дальней стороне определено как остановившееся в то время, как рассматриваемое транспортное средство остановилось с намеченным движением для поворота направо/налево; и
выполняют движение для поворота направо/налево.
2. Способ определения поворота направо/налево для транспортного средства с содействием вождению по п. 1, отличающийся тем, что:
определяют, остановилось ли соседнее встречное транспортное средство на полосе встречного движения, находящееся на ближней стороне от намеченной траектории движения, когда выполняется определение, что встречное транспортное средство на дальней стороне остановилось; и
разрешают движение для поворота направо/налево, когда выполняется определение, что соседнее встречное транспортное средство остановилось.
3. Способ определения поворота направо/налево для транспортного средства с содействием вождению по п. 1, отличающийся тем, что:
определяют, было ли распознано действие пропускания, выполняемое встречным транспортным средством на дальней стороне, когда выполняется определение, что встречное транспортное средство на дальней стороне остановилось; и
разрешают движение для поворота направо/налево, когда действие пропускания было распознано.
4. Способ определения поворота направо/налево для транспортного средства с содействием вождению по любому из пп. 1-3, отличающийся тем, что:
определяют, присутствует ли светофор перед рассматриваемым транспортным средством, когда выполняется определение, что встречное транспортное средство на дальней стороне остановилось;
определяют, было ли распознано состояние зеленого света светофора, когда определено, что светофор присутствует; и
разрешают движение для поворота направо/налево, когда распознано состояние зеленого света.
5. Способ определения поворота направо/налево для транспортного средства с содействием вождению по любому из пп. 1-4, отличающийся тем, что:
рассматриваемое транспортное средство является транспортным средством с автономным приводом и автономно выполняет движение для поворота направо/налево на основе сигнала от контроллера; и
когда выполняется определение разрешить движение для поворота направо/налево, автономно выполняют движение для поворота направо/налево и задают скорость движения во время движения для поворота направо/налево, когда встречное транспортное средство на дальней стороне присутствует, ниже скорости движения во время движения для поворота направо/налево, когда встречного транспортного средства на дальней стороне нет.
6. Устройство определения поворота направо/налево для транспортного средства с содействием вождению, содержащее:
бортовой датчик, который получает информацию о периферии рассматриваемого транспортного средства и информацию о рассматриваемом транспортном средстве; и
контроллер, который выполняет определение разрешения движения для поворота направо/налево через полосу встречного движения на основе информации, полученной бортовым датчиком,
причем контроллер включает в себя:
блок определения остановки рассматриваемого транспортного средства, который определяет, остановилось ли рассматриваемое транспортное средство с намеченным движением для поворота направо/налево;
блок определения встречного транспортного средства, который определяет, присутствует ли встречное транспортное средство на намеченной траектории движения рассматриваемого транспортного средства, когда рассматриваемое транспортное средство определено блоком определения остановки рассматриваемого транспортного средства как остановившееся с намеченным движением для поворота направо/налево;
блок определения остановки встречного транспортного средства, который определяет, остановилось ли встречное транспортное средство на дальней стороне на полосе встречного движения, присутствующее на дальней стороне от намеченной траектории движения, когда блок определения встречного транспортного средства определил, что встречное транспортное средство отсутствует на намеченной траектории движения; и
блок разрешения поворота направо/налево, который разрешает движение для поворота направо/налево, когда встречное транспортное средство на дальней стороне определяется блоком определения остановки встречного транспортного средства как остановившееся.
| JP 2009116692 A, 28.05.2009 | |||
| JP 2005222148 A, 18.08.2005 | |||
| JP 2009031968 A, 12.02.2009 | |||
| JP 2005231450 A, 02.09.2005. |

