Область техники, к которой относится изобретение
[0001]
Настоящее изобретение относится к способу помощи при вождении и устройству помощи при вождении.
Уровень техники
[0002]
В качестве технологии, помогающей при вождении уклоняться от припаркованного транспортного средства и проезжать его, известно устройство помощи при вождении, описанное в PTL 1.
Устройство помощи при вождении, описанное в PTL 1, устанавливает целевое состояние движения (скорость проезда и боковой интервал) в случае, когда собственное транспортное средство проезжает рядом с припаркованным транспортным средством, или тому подобного, посредством использования карты, сформированной на основе действий при вождении, предпринимаемых опытными водителями, и выполняет помощь при вождении таким образом, чтобы собственное транспортное средство проезжало рядом с припаркованным транспортным средством или тому подобным, находясь в целевом состоянии движения.
Список цитированных источников
Патентная литература
[0003]
PTL 1: JP 2013-109705 A
Раскрытие изобретения
Техническая проблема
[0004]
В некоторых случаях, если при помощи при вождении для выполнения поворота (например, поворота направо или налево на перекрестке или при въезде на объект) перед припаркованным транспортным средством или позади него, рулевое управление для поворота и рулевое управление для уклонения от припаркованного транспортного средства выполняется по отдельности, рулевое управление становится частым, и невозможно плавно уклониться от припаркованного транспортного средства.
Задача настоящего изобретения состоит в обеспечении плавного уклонения транспортного средства от припаркованного транспортного средства и плавного проезда его при помощи при вождении для выполнения поворота перед припаркованным транспортным средством или позади него.
Решение проблемы
[0005]
Согласно одному аспекту настоящего изобретения предложен способ помощи при вождении, включающий в себя побуждение контроллера выполнять: обработку для определения наличия или отсутствия припаркованного транспортного средства впереди на маршруте собственного транспортного средства; обработку для определения, следует ли выполнить поворот собственного транспортного средства; обработку для определения, соответствует ли расстояние между положением поворота, в котором выполняется поворот, и припаркованным транспортным средством заданному условию; обработку для формирования траектории для формирования целевой траектории движения таким образом, чтобы, если расстояние между положением поворота и припаркованным транспортным средством соответствует заданному условию, собственное транспортное средство проезжало рядом с припаркованным транспортным средством в заданном боковом положении с заданным интервалом между припаркованным транспортным средством и собственным транспортным средством с одной стороны от припаркованного транспортного средства, и положение окончания поворота в случае поворота в положении перед положением припаркованного транспортного средства или положение начала поворота в случае поворота после проезда рядом с припаркованным транспортным средством на маршруте совпадает с заданным боковым положением в направлении ширины дороги, на которой припарковано транспортное средство; и обработку для выполнения управления движением на основании целевой траектории движения.
Полезные эффекты изобретения
[0006]
Согласно аспекту настоящего изобретения можно побудить транспортное средство плавно уклониться от припаркованного транспортного средства и плавно проехать его при помощи при вождении для выполнения поворота перед припаркованным транспортным средством или позади него.
Задача и преимущества изобретения будут реализованы и достигнуты с помощью элементов и сочетаний, конкретно указанных в формуле изобретения. Следует понимать, что как вышеприведённое общее описание, так и нижеследующее подробное описание являются примерными и пояснительными и не ограничивают изобретение.
Краткое описание чертежей
[0007]
Фиг. 1 - схема, иллюстрирующая схематичный пример конфигурации устройства помощи при вождении согласно варианту осуществления;
Фиг. 2A - схема, иллюстрирующая пример помощи при вождении во время поворота на перекрестке;
Фиг. 2B - схема, иллюстрирующая пример помощи при вождении во время поворота на перекрестке, после него, во время въезда на пересекающую дорогу и последующего уклонения от припаркованного транспортного средства и проезда рядом с ним;
Фиг. 3A - схема, иллюстрирующая пример помощи при вождении, в которой объединены управление рулевым управлением для поворота налево на перекрестке и управление рулевым управлением для уклонения от припаркованного транспортного средства и проезда рядом с ним после поворота налево;
Фиг. 3B - схема, иллюстрирующая пример помощи при вождении, в которой объединены управление рулевым управлением для поворота направо на перекрестке и управление рулевым управлением для уклонения от припаркованного транспортного средства и проезда рядом с ним после поворота направо;
Фиг. 4A - схема, иллюстрирующая пример помощи при вождении, в которой объединены управление рулевым управлением для уклонения от припаркованного транспортного средства и проезда рядом с ними управление рулевым управлением для поворота налево на перекрестке после уклонения от припаркованного транспортного средства;
Фиг. 4B - схема, иллюстрирующая пример помощи при вождении, в которой объединены управление рулевым управлением для уклонения от припаркованного транспортного средства и проезда рядом с ним и управление рулевым управлением для поворота направо на перекрестке после уклонения от припаркованного транспортного средства;
Фиг. 5 - блок-схема, иллюстрирующая пример функциональной конфигурации контроллера по Фиг. 1;
Фиг. 6A - схема, иллюстрирующая первый пример способа определения положения поворота;
Фиг. 6B - схема, иллюстрирующая второй пример способа определения положения поворота;
Фиг. 7A - схема, описывающая пример случая, в котором объединены управление рулевым управлением для поворота и управление рулевым управлением для уклонения от припаркованного транспортного средства после поворота;
Фиг. 7B - схема, описывающая пример случая, в котором управление рулевым управлением для поворота и управление рулевым управлением для уклонения от припаркованного транспортного средства после поворота выполняются по отдельности;
Фиг. 8A - схема, описывающая пример случая, в котором управление рулевым управлением для уклонения от припаркованного транспортного средства и управление рулевым управлением для поворота после уклонения объединены;
Фиг. 8B - схема, описывающая пример случая, в котором управление рулевым управлением для уклонения от припаркованного транспортного средства и управление рулевым управлением для поворота после уклонения выполняются по отдельности;
Фиг. 9A - схема, описывающая другой пример случая, в котором управление рулевым управлением для уклонения от припаркованного транспортного средства и управление рулевым управлением для поворота после уклонения объединены;
Фиг. 9B - схема, описывающая другой пример случая, в котором управление рулевым управлением для уклонения от припаркованного транспортного средства и управление рулевым управлением для поворота после уклонения выполняются по отдельности;
Фиг. 10 - схема, иллюстрирующая пример помощи при вождении, в которой управление рулевым управлением для поворота собственного транспортного средства с дороги, имеющей множество полос движения, на дорогу, на которой находится припаркованное транспортное средство, и управление рулевым управлением для уклонения от припаркованного транспортного средства после поворота объединены;
Фиг. 11A - блок-схема (часть 1) первого примера способа помощи при вождении согласно варианту осуществления;
Фиг. 11B - блок-схема (часть 2) первого примера способа помощи при вождении согласно варианту осуществления;
Фиг. 12A - блок-схема (часть 1) второго примера способа помощи при вождении согласно варианту осуществления; и
Фиг. 12B - блок-схема (часть 2) второго примера способа помощи при вождении согласно варианту осуществления.
Осуществление изобретения
[0008]
Теперь со ссылкой на чертежи будет описан вариант осуществления настоящего изобретения.
Конфигурация
Теперь обратимся к Фиг. 1. Устройство 1 помощи при вождении выполняет самостоятельное управление для побуждения транспортного средства (далее называемого «собственным транспортным средством»), на котором установлено устройство 1 помощи при вождении, осуществлять самостоятельное управление без участия водителя и управление помощью при вождении для помощи водителю в управлении собственным транспортным средством на основании условий движения в окружении собственного транспортного средства.
Управление помощью при вождении включает в себя управление движением, такое как самостоятельное рулевое управление, самостоятельное торможение, управление движением с постоянной скоростью, управление удержанием полосы движения и управление для помощи при перестроении.
[0009]
Устройство 1 помощи при вождении включает в себя группу 10 датчиков окружения, навигационную систему 20, группу 30 датчиков транспортного средства, контроллер 40 и группу 50 исполнительных механизмов.
Группа 10 датчиков окружения представляет собой группу датчиков, которая обнаруживает окружающие условия в окружении собственного транспортного средства, такие как объект в окружении собственного транспортного средства. Группа 10 датчиков окружения может включать в себя устройство 11 измерения расстояния и камеру 12. Устройство 11 измерения расстояния и камера 12 обнаруживают окружающие условия в окружении собственного транспортного средства, такие как объект, присутствующий в окружении собственного транспортного средства, взаимное расположение между собственным транспортным средством и объектом, и расстояние между собственным транспортным средством и объектом.
Устройство 11 определения расстояния может быть, например, лазерным дальномером (LRF) или радаром.
[0010]
Камера 12 может быть, например, стереокамерой. Камера 12 может состоять из монокулярных камер, и посредством захвата монокулярными камерами изображений одного и того же объекта с множества ракурсов может быть вычислено расстояние до объекта. Расстояние до объекта может быть вычислено на основании положения контакта объекта с землей, обнаруженного из захваченных изображений, захваченных монокулярными камерами.
Устройство 11 измерения расстояния и камера 12 выводят информацию об окружающих условиях, которая представляет собой обнаруженную информацию об окружающих условиях, в контроллер 40.
[0011]
Навигационная система 20 распознает текущее положение собственного транспортного средства и информацию о карте дороги в текущем положении. Навигационная система 20 устанавливает маршрут движения к месту назначения, которое вводит пассажир, и осуществляет направление по маршруту для пассажира в соответствии с маршрутом движения. Навигационная система 20 дополнительно выводит информацию об установленном маршруте движения в контроллер 40.
Когда состояние движения собственного транспортного средства находится в режиме самостоятельного управления, контроллер 40 побуждает собственное транспортное средство осуществлять самостоятельное управление таким образом, что собственное транспортное средство движется по маршруту движения, установленному навигационной системой 20.
[0012]
Навигационная система 20 включает в себя навигационный контроллер 21, устройство 22 определения положения, картографическую базу 23 данных, блок 24 отображения, блок 25 управления, блок 26 голосового вывода и блок 27 связи. Отметим, что картографическая база данных обозначена как «картографическая DB» на Фиг. 1.
Навигационный контроллер 21 представляет собой электронный блок управления, который управляет операцией обработки информации навигационной системы 20. Контроллер 21 навигации включает в себя процессор и его периферийные компоненты. Процессор может представлять собой, например, центральный процессор (CPU) или микропроцессор (MPU).
[0013]
Периферийные компоненты включают в себя запоминающее устройство и тому подобное. Запоминающее устройство может включать в себя любое из полупроводникового запоминающего устройства, магнитного запоминающего устройства и оптического запоминающего устройства. Запоминающее устройство может включать в себя регистры, кэш-память и память, которая представляет собой постоянное запоминающее устройство (ROM) и оперативное запоминающее устройство (RAM), используемые в качестве основного запоминающего устройства.
Устройство 22 определения положения измеряет текущее положение собственного транспортного средства. Устройство 22 определения положения может представлять собой, например, приемник глобальной системы определения местоположения (GPS). В качестве альтернативы, устройство 22 определения положения может измерять текущее положение собственного транспортного средства на основе глобальной навигационной спутниковой системы (GNSS), отличной от приемника GPS. В качестве ещё одной альтернативы, устройство 22 определения положения может быть инерциальным навигационным устройством.
[0014]
В картографической базе 23 данных хранятся данные карты дорог. Данные карты дорог включают в себя информацию о типах дорог, формах дорог, уклонах, количестве полос движения, разрешенных скоростях (ограничениях скорости), ширине дорог, наличии или отсутствии перекрестков и тому подобном. В типы дорог включены, например, обычная дорога и скоростная автомагистраль.
Блок 24 отображения выводит в навигационную систему 20 различную визуальную информацию. Например, на блоке 24 отображения может отображаться экран карты, показывающий карту вокруг собственного транспортного средства и указания по рекомендуемому маршруту. Сообщение, формируемое при управлении помощью при вождении, выполняемом устройством 1 помощи при вождении (например, сообщение, побуждающее водителя выполнить операцию рулевого управления или операцию замедления), также может отображаться на блоке 24 отображения.
[0015]
Блок 25 управления принимает операции, выполняемые пассажиром, в навигационной системе 20. Блок 25 управления может быть, например, кнопкой, диском или ползунком, или может быть сенсорной панелью, расположенной в блоке 24 отображения. Например, блок 25 управления может принимать операцию ввода места назначения, введенного пассажиром, или операцию переключения экранов отображения на блоке 24 отображения.
[0016]
Блок 26 голосового вывода выводит различную голосовую информацию в навигационную систему 20. Блок 26 голосового вывода может выводить указания по управлению на основании установленного маршрута движения или информацию указаний в отношении дороги на основании данных карты дорог в окружении собственного транспортного средства. Блок 26 голосового вывода может выводить сообщение, сформированное при управлении помощью при вождении, выполняемом устройством 1 помощи при вождении (например, сообщение, побуждающее водителя выполнить операцию рулевого управления или операцию замедления).
[0017]
Блок 27 связи осуществляет беспроводную связь с устройством связи, внешним по отношению к собственному транспортному средству. Способ связи, используемый блоком 27 связи, может быть, например, беспроводной связью через сеть мобильной телефонной связи общего пользования, связью между транспортными средствами, связью между дорогой и транспортным средством или спутниковой связью. Навигационная система 20 может получать данные карты дорог от внешнего устройства через блок 27 связи.
[0018]
Группа 30 датчиков транспортного средства включает в себя датчик для обнаружения состояния движения собственного транспортного средства и датчик для обнаружения операции управления, выполняемой водителем.
Датчики для обнаружения состояния движения собственного транспортного средства включают в себя датчик 31 скорости транспортного средства, датчик 32 ускорения и гироскопический датчик 33.
Датчики для обнаружения операции управления включают в себя датчик 34 угла рулевого управления, датчик 35 акселератора и датчик 36 тормоза.
[0019]
Датчик 31 скорости транспортного средства определяет скорость колеса собственного транспортного средства и вычисляет скорость собственного транспортного средства на основании скорости колеса.
Датчик 32 ускорения обнаруживает ускорение в продольном направлении, ускорение в направлении ширины транспортного средства и ускорение в направлении вверх и вниз собственного транспортного средства.
Гироскопический датчик 33 определяет угловые скорости углов поворота собственного транспортного средства вокруг трех осей, включая ось крена, ось тангажа и ось рыскания.
[0020]
Датчик 34 угла рулевого управления определяет текущий угол рулевого управления, который является текущим углом поворота (величиной операции рулевого управления) рулевого колеса, которое является оператором рулевого управления.
Датчик 35 акселератора обнаруживает открытие акселератора собственного транспортного средства. Например, датчик 35 акселератора определяет величину нажатия на педаль акселератора собственного транспортного средства в качестве открытия акселератора.
[0021]
Датчик 36 тормоза определяет величину операции торможения водителем. Например, датчик 36 тормоза определяет величину нажатия на педаль тормоза собственного транспортного средства в качестве величины операции торможения.
Элементы информации о скорости, ускорении, угловой скорости, угле рулевого управления, открытии акселератора и величине операции торможения собственного транспортного средства, которые обнаруживаются соответствующими датчиками в группе 30 датчиков транспортного средства, вместе называются «информацией от датчиков». Группа 30 датчиков транспортного средства выводит информацию от датчиков на контроллер 40.
[0022]
Контроллер 40 представляет собой электронный блок управления, который выполняет управление системой помощи при вождении собственного транспортного средства. Контроллер 40 включает в себя процессор 41 и периферийные компоненты, такие как запоминающее устройство 42. Процессор 41 может представлять собой, например, CPU или MPU.
Запоминающее устройство 42 может включать в себя любое из полупроводникового запоминающего устройства, магнитного запоминающего устройства и оптического запоминающего устройства. Запоминающее устройство 42 может включать в себя регистры, кэш-память и память, которые представляют собой ROM и RAM, используемые в качестве основного запоминающего устройства.
[0023]
Следует отметить, что контроллер 40 может быть реализован посредством функциональной логической схемы, которая реализована в полупроводниковой интегральной схеме общего назначения. Например, контроллер 40 может включать в себя программируемое логическое устройство (PLD), такое как программируемая вентильная матрица (FPGA) и тому подобное.
[0024]
Контроллер 40 формирует целевую траекторию движения, по которой собственное транспортное средство побуждают двигаться по маршруту движения, установленному навигационной системой 20, на основании информации об окружающих условиях, введенной из группы 10 датчиков окружающих условий, и информации от датчиков, введенной из группы 30 датчиков транспортного средства.
Контроллер 40 побуждает собственное транспортное средство двигаться самостоятельно, приводя в действие группу 50 исполнительных механизмов таким образом, что собственное транспортное средство движется по сформированной целевой траектории движения.
[0025]
Группа 50 исполнительных механизмов управляет рулевым колесом, открытием акселератора и тормозным устройством собственного транспортного средства в соответствии с управляющим сигналом от контроллера 40 и тем самым формирует поведение транспортного средства для собственного транспортного средства. Группа 50 исполнительных механизмов включает в себя исполнительный механизм 52 рулевого управления, исполнительный механизм 53 открытия акселератора и исполнительный механизм 54 управления тормозом.
[0026]
Исполнительный механизм 52 рулевого управления управляет направлением рулевого управления и величиной рулевого управления собственного транспортного средства.
Исполнительный механизм 53 открытия акселератора управляет открытием акселератора собственного транспортного средства.
Исполнительный механизм 54 управления тормозом осуществляет управление торможением для тормозного устройства собственного транспортного средства.
[0027]
Ниже будет описана помощь при вождении, которую устройство 1 помощи при вождении выполняет, когда собственное транспортное средство побуждают повернуть на перекрестке или тому подобное.
Обратимся теперь к Фиг. 2A. Предполагается случай, когда собственное транспортное средство 63 побуждают повернуть (налево) на перекрестке 62, на котором друг с другом пересекаются дорога 60 и дорога 61 , и выехать на дорогу 61 с дороги 60. Дорога 60, по которой движется собственное транспортное средство 63 перед поворотом, называется «дорогой собственного транспортного средства», а дорога 61, которая пересекает дорогу 60 собственного транспортного средства, называется «пересекающей дорогой».
[0028]
В этом случае устройство 1 помощи при вождении устанавливает целевую траекторию движения, по которой собственное транспортное средство 63 поворачивает на перекрестке 62 и затем движется по пересекающей дороге 61 по линии 64 движения.
Линия 64 движения устанавливается на основании ширины дороги и наличия или отсутствия разметки полос движения на пересекающей дороге 61, бокового положения и ширины полосы движения для полосы движения на пересекающей дороге 61, по которой движется собственное транспортное средство, ширины транспортного средства для собственного транспортного средства 63, количества полос движения, правил дорожного движения, применяемых к пересекающей дороге 61, и тому подобного, когда собственное транспортное средство 63 не уклоняется от препятствия (например, припаркованного транспортного средства).
[0029]
Например, если имеется разметка полос движения, разделяющая полосу движения для движения и противоположную полосу движения, устройство 1 помощи при вождении может устанавливать линию 64 движения по существу в центре полосы движения, по которой движется собственное транспортное средство.
Например, если нет разметки полосы движения, разделяющей полосу движения для движения и противоположную полосу движения, устройство 1 помощи при вождении может установить линию 64 движения на левой стороне пересекающей дороги 61 в области, где обязательным является левостороннее движение, и правую сторону пересекающей дороги 61 в области, где обязательным является правостороннее движение, таким образом, чтобы предусмотреть заданный интервал между линией 64 движения и обочиной дороги.
Заданная линия 64 движения, по которой движется собственное транспортное средство 63 без уклонения от препятствия, называется «обычной линией движения».
[0030]
Фиг. 2B иллюстрирует случай, когда припаркованное транспортное средство 65 находится на пересекающей дороге 61. В этом случае возможно, что задана целевая траектория движения, по которой собственное транспортное средство 63 однажды будет побуждаться двигаться по обычной линии 64 движения сразу после поворота на перекрестке 62 и въезда на пересекающую дорогу 61, а затем будет побуждаться уклониться от припаркованного транспортного средства 65 и проехать рядом с ним, как показано линией 66 движения, и вернуться к обычной линии 64 движения.
[0031]
В этом случае управление рулевым управлением для поворота на перекрестке 62 и управление рулевым управлением для уклонения от припаркованного транспортного средства 65 не являются непрерывными и выполняются по отдельности. То есть собственное транспортное средство 63 движется прямо по обычной линии 64 движения между рулевым управлением для поворота на перекрестке 62 и рулевым управлением для уклонения от припаркованного транспортного средства 65.
Поскольку это управление приводит к тому, что управление рулевым управлением для однократного возврата угла рулевого управления и управление рулевым управлением для уклонения от припаркованного транспортного средства 65 происходит после управления рулевым управлением для поворота на перекрестке 62, рулевое управление становится частым, и таким образом невозможно плавно уклониться от припаркованного транспортного средства 65.
[0032]
Таким образом, устройство 1 помощи при вождении объединяет управление рулевым управлением для поворота и управление рулевым управлением для уклонения от припаркованного транспортного средства 65. Более конкретно, устройство 1 помощи при вождении формирует целевую траекторию движения таким образом, что собственное транспортное средство 63 проезжает рядом с припаркованным транспортным средством 65 в заданном боковом положении с заданным интервалом между припаркованным транспортным средством 65 и собственным транспортным средством 63 с одной стороны припаркованного транспортного средства 65, и в связи с этим положение окончания поворота в случае поворота до достижения припаркованного транспортного средства 65 или положение начала поворота в случае поворота после проезда рядом с припаркованным транспортным средством 65 совпадает с заданным боковым положением в направлении ширины дороги, на которой припарковано припаркованное транспортное средство.
Далее объединение управления рулевым управлением для поворота и управление рулевым управлением для уклонения от припаркованного транспортного средства 65 иногда просто называется «объединением управления рулевым управлением».
Обращаясь к Фиг. 3A и 3B, будет описан случай, когда припаркованное транспортное средство 65 находится на дороге, на которую собственное транспортное средство 63 въезжает после поворота.
[0033]
Как показано на Фиг. 3A, когда собственное транспортное средство 63 поворачивает налево на перекрестке 62 и выезжает на пересекающую дорогу 61, на которой находится припаркованное транспортное средство 65, устройство 1 помощи при вождении формирует целевую траекторию 68 движения, по которой собственное транспортное средство 63 поворачивает налево на перекрестке 62 таким образом, чтобы предусмотреть поперечный интервал IL между собственным транспортным средством 63 и припаркованным транспортным средством 65 в положении 67 окончания (положении окончания поворота) поворота на перекрестке 61 и проехать рядом с припаркованным транспортным средством 65 в боковом положении с поперечным интервалом IL между собственным транспортным средством 63 и припаркованным транспортным средством 65, тем самым уклоняясь от припаркованного транспортного средства 65. В данном контексте положением окончания поворота может быть, например, положение, в котором направление движения собственного транспортного средства 63 становится параллельным пересекающей дороге 61, или положение, в котором угол рыскания транспортного средства перестает изменяться.
[0034]
Как показано на Фиг. 3B, когда собственное транспортное средство 63 поворачивает направо на перекрестке 62 и выезжает на пересекающую дорогу 61, на которой находится припаркованное транспортное средство 65, устройство 1 помощи при вождении формирует целевую траекторию 70 движения, по которой собственное транспортное средство 63 поворачивает направо на перекрестке 62, таким образом, чтобы предусмотреть поперечный интервал IL между собственным транспортным средством 63 и припаркованным транспортным средством 65 в положении 69 окончания (положении окончания поворота) поворота на перекрестке 61 и проехать рядом с припаркованным транспортным средством 65 в боковом положении с поперечным интервалом IL между собственным транспортным средством 63 и припаркованным транспортным средством 65, тем самым уклоняясь от припаркованного транспортного средства 65. То есть, когда, как показано на Фиг. 3A и 3B, собственное транспортное средство 63 поворачивает, прежде чем достичь припаркованного транспортного средства 65, устройство 1 помощи при вождении формирует целевые траектории 68 и 70 движения таким образом, чтобы собственное транспортное средство 63 проезжало рядом с припаркованным транспортным средством 65 в заданном боковом положении с заданным интервалом IL, предусмотренным между припаркованным транспортным средством 65 и собственным транспортным средством 63 с одной стороны припаркованного транспортного средства 65, и в связи с этим положения 69 и 67 окончания поворота совпадают с заданным боковым положением в направлении ширины дороги, на которой припарковано припаркованное транспортное средство 65, соответственно.
[0035]
Далее, обращаясь к Фиг. 4A и 4B, будет описан случай, когда собственное транспортное средство 63 уклоняется от припаркованного транспортного средства 65 и затем поворачивает.
Предполагается случай, когда, как показано на Фиг. 4A, собственное транспортное средство 63 побуждают повернуть (налево) на перекрестке 73, на котором дорога 71, на которой присутствует припаркованное транспортное средство 65, и дорога 72 пересекаются друг с другом, и выехать на дорогу 72 с дороги 71. Дорога 71, по которой движется собственное транспортное средство 63 перед поворотом, называется «дорогой собственного транспортного средства», а дорога 72, которая пересекает дорогу 71 собственного транспортного средства, называется «пересекающей дорогой».
[0036]
Устройство 1 помощи при вождении формирует целевую траекторию 75 движения, по которой собственное транспортное средство 63 движется в поперечном направлении таким образом, чтобы проехать рядом с припаркованным транспортным средством 65 в боковом положении с поперечным интервалом IL между собственным транспортным средством 63 и припаркованным транспортным средством 65, тем самым уклоняясь от припаркованного транспортного средства 65, а затем поворачивает налево на перекрестке 73 таким образом, чтобы предусмотреть поперечный интервал IL между собственным транспортным средством 63 и припаркованным транспортным средством 65 в положении 74 начала поворота на дороге 71 собственного транспортного средства. В контексте настоящего документа положение начала поворота может быть, например, положением, в котором направление движения собственного транспортного средства 63 начинает наклоняться по отношению к дороге 71 собственного транспортного средства, или положением, в котором угол рыскания начинает изменяться.
[0037]
Фиг. 4B иллюстрирует случай, когда собственное транспортное средство 63 побуждают повернуть направо и выехать на пересекающую дорогу 72 с дороги 71 собственного транспортного средства.
Устройство 1 помощи при вождении формирует целевую траекторию 77 движения, по которой собственное транспортное средство 63 движется в боковом направлении таким образом, чтобы проехать рядом с припаркованным транспортным средством 65 в боковом положении с поперечным интервалом IL между собственным транспортным средством 63 и припаркованным транспортным средством 65, тем самым уклоняясь от припаркованного транспортного средства 65, а затем поворачивает направо на перекрестке 73 таким образом, чтобы предусмотреть поперечный интервал IL между собственным транспортным средством 63 и припаркованным транспортным средством 65 в положении 76 начала поворота на дороге 71 собственного транспортного средства. То есть, когда, как показано на Фиг. 4A и 4B, собственное транспортное средство 63 поворачивает после проезда рядом с припаркованным транспортным средством 65, устройство 1 помощи при вождении формирует целевые траектории 75 и 77 движения таким образом, чтобы собственное транспортное средство 63 проехало рядом с припаркованным транспортным средством 65 в заданном боковом положении с заданным интервалом IL между припаркованным транспортным средством 65 и собственным транспортным средством 63 с одной стороны припаркованного транспортного средства 65 и, в связи с этим, положения 74 и 76 начала поворота совпадают с заданным боковым положением в направлении ширины дороги, на которой припарковано припаркованное транспортное средство, соответственно.
[0038]
Объединённое управление рулевым управлением, как описано выше, позволяет уменьшить количество поворотов рулевого управления и плавно уклониться от припаркованного транспортного средства 65.
Ниже с обращением к Фиг. 5 будет описан пример функциональной конфигурации контроллера 40. Контроллер 40 включает в себя блок 80 получения дорожной информации собственного транспортного средства, блок 81 получения информации о курсе собственного транспортного средства, блок 82 получения информации о пересекающих дорогах, блок 83 получения информации о других транспортных средствах, блок 84 получения сигналов транспортного средства, блок 85 определения положения поворота, блок 86 определения положения уклонения, блок 87 определения объединения, блок 88 формирования траектории и блок 89 управления движением.
[0039]
Функции блока 80 получения дорожной информации собственного транспортного средства, блока 81 получения информации о курсе собственного транспортного средства, блока 82 получения информации о пересекающих дорогах, блока 83 получения информации о других транспортных средствах, блока 84 получения сигналов транспортного средства, блока 85 определения положения поворота, блока 86 определения положения уклонения, блока 87 определения объединения, блока 88 формирования траектории и блока 89 управления движением могут быть реализованы, например, процессором 41 контроллера 40, выполняющим компьютерные программы, сохранённые в запоминающем устройстве 42.
[0040]
Блок 80 получения дорожной информации для собственного транспортного средства получает дорожную информацию для собственного транспортного средства, которая представляет собой информацию о дорогах 60 и 71 собственного транспортного средства, из информации о состоянии окружения, выводимой из группы 10 датчиков состояния окружения, и/или данных карты дорог, считанных из картографической базы данных. Дорожная информация для собственного транспортного средства может быть, например, информацией, представляющей ширину W0 дорог 60 и 71 собственного транспортного средства.
Блок 80 получения дорожной информации для собственного транспортного средства выводит дорожную информацию для собственного транспортного средства в блок 85 определения положения поворота, блок 86 определения положения уклонения и блок 88 формирования траектории.
[0041]
Блок 81 получения информации о курсе собственного транспортного средства получает информацию о курсе собственного транспортного средства в отношении планируемого курса собственного транспортного средства из маршрута движения, установленного навигационной системой 20. Информация о курсе собственного транспортного средства может быть, например, информацией, представляющей, движется ли собственное транспортное средство 63 прямо, поворачивает ли налево или поворачивает ли направо на перекрестках 62 и 73.
Блок 81 получения информации о курсе собственного транспортного средства выводит информацию о курсе собственного транспортного средства в блок 85 определения положения поворота и блок 88 формирования траектории.
[0042]
Блок 82 получения информации о пересекающих дорогах получает информацию о пересекающих дорогах, которая представляет собой информацию о пересекающих дорогах 61 и 72, из информации о состоянии окружения, выводимой из группы 10 датчиков состояния окружения и/или из данных карты дорог, считанных из картографической базы 23 данных . Блок 82 получения информации о пересекающих дорогах может получать информацию о пересекающих дорогах посредством связи между транспортными средствами или связи между дорогой и транспортным средством, осуществляемой блоком 27 связи.
[0043]
Информация о пересекающих дорогах может представлять собой, например, информацию, которая представляет положения (Xin, Yin) и ширину пересекающих дорог 61 и 72, а также сигнальную индикацию светофора, установленного на пересечении 73 дороги 71 собственного транспортного средства и пересекающей дороги 72. Положения (Xin, Yin) пересекающих дорог 61 и 72 могут быть, например, координатами в системе координат, которая используется в данных карты дорог в картографической базе 23 данных, или относительными координатами с текущим положением собственного транспортного средства 63 в качестве начала координат.
Блок 82 получения информации о пересекающих дорогах выводит информацию о пересекающих дорогах в блок 85 определения положения поворота, блок 86 определения положения уклонения, блок 87 определения объединения и блок 88 формирования траектории.
[0044]
Блок 83 получения информации о других транспортных средствах получает информацию о других транспортных средствах, которая представляет собой информацию о другом транспортном средстве, присутствующем в окружении собственного транспортного средства 63, из информации о состоянии окружения, выводимой из группы 10 датчиков состояния окружения. Блок 83 получения информации о других транспортных средствах может получать информацию о других транспортных средствах посредством связи между транспортными средствами или связи между дорогой и транспортным средством, осуществляемой блоком 27 связи.
Другое транспортное средство может быть, например, припаркованным транспортным средством 65, встречным транспортным средством, приближающимся к собственному транспортному средству 63 по дороге 71 собственного транспортного средства или пересекающей дороге 61, на которой находится припаркованное транспортное средство 65, или пересекающим транспортным средством, движущимся по пересекающей дороге 72 и приближающимся к перекрестку 73.
[0045]
Информация о других транспортных средствах может быть информацией, которая представляет положение (Xpn, Ypn) и ширину транспортного средства для другого транспортного средства. Координата по X Xpn в положении другого транспортного средства может быть, например, координатой в направлении ширины (боковом направлении) пересекающей дороги 61 или дороги 71 собственного транспортного средства. Координата по Y Ypn в положении другого транспортного средства может быть, например, координатой в направлении движения (продольном направлении) с положением перекрестка 62 или 73 в качестве начала координат.
[0046]
Положение (Xpn, Ypn) другого транспортного средства может быть, например, координатами в системе координат, которая используется в данных карты дорог картографической базы 23 данных, или относительными координатами с текущим положением собственного транспортного средства 63 в качестве начала координат.
Блок 83 получения информации о других транспортных средствах выводит информацию о других транспортных средствах в блок 86 определения положения уклонения, блок 87 определения объединения и блок формирования траектории.
[0047]
Блок 84 получения сигналов транспортного средства получает сигнал транспортного средства, который представляет собой информацию о собственном транспортном средстве 63, из информации датчиков, выводимой из группы 30 датчиков транспортного средства. Сигнал транспортного средства может быть, например, сигналом, представляющим скорость, или информацией, представляющей угол рулевого управления собственного транспортного средства 63.
Блок 84 получения сигналов транспортного средства выводит сигнал транспортного средства в блок 88 формирования траектории.
[0048]
Блок 85 определения положения поворота определяет положение поворота собственного транспортного средства 63. Например, блок 85 определения положения поворота может определять положение поворота собственного транспортного средства 63 (положение, в котором выполняется поворот собственного транспортного средства 63, то есть положение, в котором угол рыскания собственного транспортного средства начинает изменяться) на основании ширины W0 дорог 60 и 71 собственного транспортного средства, ширины пересекающих дорог 61 и 72 и положений (Xin, Yin) пересекающих дорог.
Обратимся теперь к Фиг. 6A. Например, блок 85 определения положения поворота может определять точку 90 окончания поворота на перекрестке 62 в случае, когда точка 90 окончания поворота расположена на обычной линии 64 движения (например, в случае, когда управление рулевым управлением для поворота на перекрестке 62 и управление рулевым управлением для уклонения от припаркованного транспортного средства не объединены) в качестве положения поворота.
[0049]
Например, блок 85 определения положения поворота может также определять положение 91 въезда на перекресток 62 в качестве положения поворота.
Обратимся теперь к Фиг. 6B. Например, блок 85 определения положения поворота может определять точку 92 начала поворота на перекрестке 73 в случае, когда точка 92 начала поворота расположена на обычной линии 64 движения (например, в случае, когда управление рулевым управлением для поворота на перекрестке 73 и управление рулевым управлением для уклонения от припаркованного транспортного средства не объединены) в качестве положения поворота.
Например, блок 85 определения положения поворота может также определять положение 93 въезда на перекресток 73 в качестве положения поворота.
[0050]
Следует отметить, что устройство 1 помощи при вождении может объединять управление рулевым управлением для поворота в местоположении, отличном от перекрестка, и управление рулевым управлением для уклонения от припаркованного транспортного средства. Например, устройство 1 помощи при вождении может объединять управление рулевым управлением для поворота на изогнутой дороге и управление рулевым управлением для уклонения от припаркованного транспортного средства.
Кроме того, устройство 1 помощи при вождении может объединять управление рулевым управлением для поворота в случае въезда или выезда на объект (например, автостоянку, коммерческий объект или общественный объект), находящийся вдоль дороги, на которой присутствует припаркованное транспортное средство, и управление рулевым управлением для уклонения от припаркованного транспортного средства. В этом случае блок 85 определения положения поворота может определять положение въезда или выезда с объекта в качестве положения поворота.
Блок 85 определения положения поворота выводит определенное положение поворота в блок 87 определения объединения.
[0051]
Обратимся теперь к Фиг. 5. Блок 86 определения положения уклонения определяет положение уклонения, в котором собственное транспортное средство 63 уклоняется от припаркованного транспортного средства 65.
Например, блок 86 определения положения уклонения может определять положение уклонения на основании ширины W0 дороги для дороги 71 собственного транспортного средства, ширины дороги для пересекающей дороги 61, а также положения (Xpn, Ypn) и ширины транспортного средства для другого транспортного средства.
[0052]
Например, если на дороге, на которую въезжает собственное транспортное средство 63 после поворота (Фиг. 3A и 3B) присутствует припаркованное транспортное средство 65, блок 86 определения положения уклонения может определять задний конец припаркованного транспортного средства 65 в качестве положения уклонения.
Например, если собственное транспортное средство 63 уклоняется от припаркованного транспортного средства 65 (проезжает рядом с припаркованным транспортным средством 65) и затем поворачивает (Фиг. 4A и 4B), блок 86 определения положения уклонения может определять передний конец припаркованного транспортного средства 65 в качестве положения уклонения.
Блок 86 определения положения уклонения выводит определенное положение уклонения в блок 87 определения объединения.
[0053]
Блок 87 определения объединения определяет, следует ли объединить управление рулевым управлением, на основании того, соответствует ли расстояние D между положением поворота и положением уклонения (то есть расстояние от положения поворота до припаркованного транспортного средства 65) заданному условию.
Обратимся теперь к Фиг. 7A. Если на дороге, на которую въезжает собственное транспортное средство 63 после поворота, присутствует припаркованное транспортное средство 65, блок 87 определения объединения определяет, что следует объединить управление рулевым управлением, если, например, расстояние D между положением поворота и положением уклонения равно или меньше заданного расстояния Dt, и не имеется встречное транспортное средство, которое движется по пересекающей дороге 61 и приближается к собственному транспортному средству 63.
Блок 87 определения объединения может определять, имеется ли встречное транспортное средство, на основании информации о других транспортных средствах, выводимой из блока 83 получения информации о других транспортных средствах.
[0054]
Заданное расстояние Dt может быть установлено на основании стандартного времени T уклонения, которое является стандартным временем, необходимым собственному транспортному средству 63 для уклонения от припаркованного транспортного средства и проезда рядом с ним.
Стандартное время T уклонения может представлять собой, например, период времени с момента времени, в который собственное транспортное средство 63 начинает двигаться вбок от обычной линии 64 движения, чтобы проехать рядом с припаркованным транспортным средством 65 с боковым интервалом между припаркованным транспортным средством 65 и собственным транспортным средством 63 до момента времени, в который собственное транспортное средство 63 проехало рядом с припаркованным транспортным средством 65 и возвращается на обычную линию 64 движения, как показано линией 66 движения, проиллюстрированной на Фиг. 2B.
Блок 87 определения объединения может, например, установить произведение V × T стандартного времени T уклонения и скорости V собственного транспортного средства 63 в качестве заданного расстояния Dt.
[0055]
Обратимся теперь к Фиг. 7B. Например, блок 87 определения объединения определяет, что не следует объединять управление рулевым управлением, если расстояние D между положением поворота и положением уклонения больше заданного расстояния Dt. Например, блок 87 определения объединения также может определить, что не следует объединять управление рулевым управлением, когда имеется встречное транспортное средство 94, которое движется по пересекающей дороге 61 и приближается к собственному транспортному средству 63.
[0056]
Обратимся теперь к Фиг. 8A. Если собственное транспортное средство 63 уклоняется от припаркованного транспортного средства 65 и затем поворачивает, блок 87 определения объединения определяет, что следует объединить управление рулевым управлением, если, например, расстояние D между положением поворота и положением уклонения (то есть расстояние от положения поворота до положения уклонения от припаркованного транспортного средство 65) равно или меньше заданного расстояния Dt, нет встречного транспортного средства, которое движется по дороге 71 собственного транспортного средства и приближается к собственному транспортному средству 63, и нет пересекающего транспортного средства, которое движется по пересекающей дороге 72 и приближается к перекрестку 73.
Существует вероятность того, что такое пересекающее транспортное средство повернет на перекрестке 73 и выедет на дорогу 71 собственного транспортного средства. Следовательно, если собственное транспортное средство 63 находится близко к противоположной полосе движения вблизи перекрестка 73 в результате объединения управления рулевым управлением, существует вероятность того, что собственное транспортное средство 63 будет препятствовать движению пересекающего транспортного средства, которое должно выехать на дорогу собственного транспортного средства 71. По этой причине блок 87 определения объединения определяет, что следует объединить управление рулевым управлением, если пересекающее транспортное средство не имеется.
[0057]
Например, блок 87 определения объединения может определять, имеется ли пересекающее транспортное средство, на основании информации о других транспортных средствах, выводимой из блока 83 получения информации о других транспортных средствах.
Если светофор 95 на перекрестке 73 указывает собственному транспортному средству 63 сигнал для продолжения движения, пересекающее транспортное средство не выезжает на дорогу 71 собственного транспортного средства. Следовательно, если, например, сигнал 95 светофора указывает сигнал для продолжения движения собственному транспортному средству 63, блок 87 определения объединения может определить, что такое пересекающее транспортное средство отсутствует. Блок 87 определения объединения может определять указания сигнала 95 светофора на перекрестке 73 на основании, например, информации о пересекающих дорогах, выводимой из блока 82 получения информации о пересекающих дорогах.
[0058]
Обратимся теперь к Фиг. 8B. Например, блок 87 определения объединения определяет, что не следует объединять управление рулевым управлением, если расстояние D между положением поворота и положением уклонения больше заданного расстояния Dt. Например, блок 87 определения объединения может также определить, что не следует объединять управление рулевым управлением, если имеется встречное транспортное средство 96, которое движется по дороге 71 собственного транспортного средства и приближается к собственному транспортному средству 63. Например, блок 87 определения объединения может также определить, что не следует объединять управление рулевым управлением, если имеются пересекающие транспортные средства 97 и 98, которые движутся по пересекающей дороге 72 и приближаются к перекрестку 73.
Если сигнал 95 светофора не указывает сигнал для продолжения движения собственному транспортному средству 63 (например, сигнал 95 светофора указывает сигнал остановки), блок 87 определения объединения может определить, что имеется пересекающее транспортное средство.
[0059]
Обратимся теперь к Фиг. 9A. Например, блок 87 определения объединения может определять, что следует объединить управление рулевым управлением, если расстояние D между положением поворота и положением уклонения равно или меньше заданного расстояния Dt, нет встречного транспортного средства, приближающегося к собственному транспортному средству 63, и нет разметки полос движения, разделяющая полосу движения и противоположную полосу движения, нанесенной на дороге 71 собственного транспортного средства.
Блок 87 определения объединения может определять, нанесена ли такая разметка полос движения, на основании информации о состоянии окружения, выводимой из группы 10 датчиков состояния окружения и группы 10 датчиков состояния окружения.
[0060]
Обратимся теперь к Фиг. 9B. Например, блок 87 определения объединения определяет, что не следует объединять управление рулевым управлением, если расстояние D между положением поворота и положением уклонения больше заданного расстояния Dt. Например, блок 87 определения объединения также может определить, что не следует объединять управление рулевым управлением, если имеется пересекающее транспортное средство 99 или встречное транспортное средство 100. Например, блок 87 определения объединения также может определить, что не следует объединять управление рулевым управлением, если разметка полосы движения, разделяющая полосу движения и противоположную полосу движения, нанесена на дороге 71 собственного транспортного средства.
Обратимся теперь к Фиг. 5. Блок 87 определения объединения выводит результат определения того, следует ли объединять управление рулевым управлением, в блок 88 формирования траектории.
[0061]
Блок 88 формирования траектории формирует целевую траекторию движения, по которой движется собственное транспортное средство, на основании информации о состоянии окружения, выводимой из группы 10 датчиков состояния окружения, данных карты дорог, обеспечиваемых навигационной системой 20, маршрута движения, установленного навигационной системой 20, и сигналом транспортного средства.
Если блок 87 определения объединения определяет, что следует объединить управление рулевым управлением, блок 88 формирования траектории формирует целевую траекторию движения, в которой управление рулевым управлением для поворота и управление рулевым управлением для уклонения от припаркованного транспортного средства 65 объединены. В частности, блок 88 формирования траектории формирует целевую траекторию движения таким образом, чтобы собственное транспортное средство 63 уклонилось от припаркованного транспортного средства 65 и проехало рядом с ним и, в связи с этим, устанавливает боковой интервал между собственным транспортным средством 63 и припаркованным транспортным средством 65 в положении начала или положении окончания поворота на перекрестке.
[0062]
Обратимся теперь к Фиг. 7A. Например, блок 88 формирования траектории формирует целевую траекторию 68 движения, по которой собственное транспортное средство 63 поворачивает налево на перекрестке 62, таким образом, чтобы предусмотреть боковой интервал между собственным транспортным средством 63 и припаркованным транспортным средством 65 в положении 67 окончания поворота на пересекающей дороге 61 и уклоняется от припаркованного транспортного средства 65 и проезжает рядом с ним.
Обратимся теперь к Фиг. 8A и 9A. Например, блок 88 формирования траектории формирует целевую траекторию 75 движения, по которой собственное транспортное средство 63 уклоняется от припаркованного транспортного средства 65 и проезжает рядом с ним, таким образом, чтобы предусмотреть боковой интервал между собственным транспортным средством 63 и припаркованным транспортным средством 65 в положении 74 начала поворота на дороге 71 собственного транспортного средства, и затем поворачивает налево на перекрестке 73.
[0063]
Обратимся теперь к Фиг. 10. Дорога 60 собственного транспортного средства имеет множество полос движения (например, множество полос движения с одной стороны) 101 - 104, по которым транспортные средства могут двигаться в том же направлении, что и направление движения собственного транспортного средства, а пересекающая дорога 61 имеет множество полос движения (например, множество полос движения с одной стороны) 105 и 106, по которым транспортные средства могут двигаться в том же направлении, что и направление движения собственного транспортного средства.
В этом случае блок 88 формирования траектории может формировать целевую траекторию 107 движения, по которой собственное транспортное средство 63 изменяет полосу движения с полосы 101 движения, которая находится дальше от противоположных полос движения, на полосу 102 движения, которая ближе к противоположным полосам 101 и 102 движения, с которых транспортным средствам разрешено въезжать на пересекающую дорогу 61, и затем начинает поворот на перекрестке 62.
[0064]
Полоса 102 движения, которая находится ближе к противоположным полосам движения, представляет собой полосу движения с правой стороны от полосы 101 движения, которая находится дальше от противоположных полос движения, в зоне, где обязательным является левостороннее движение , и полосу движения с левой стороны от полосы 101 движения, которая находится дальше от противоположных полос движения, в зоне, где обязательным является правостороннее движение.
Такое выполнение смены полосы движения перед поворотом на перекрестке 62 позволяет собственному транспортному средству 63, которое движется по полосе 101 движения и должно выехать на полосу 105 движения, на которой находится припаркованное транспортное средство 65, избежать смены полосы движения на перекрестке 62, въезжая на полосу 106 движения, на которой собственное транспортное средство 63 может уклониться от припаркованного транспортного средства 65 и проехать его.
[0065]
Если блок 87 определения объединения определяет, что не следует объединять управление рулевым управлением, блок 88 формирования траектории формирует целевую траекторию движения, в которой управление рулевым управлением для поворота и управление рулевым управлением для уклонения от припаркованного транспортного средства 65 выполняются по отдельности. То есть блок 88 формирования траектории формирует целевую траекторию движения, в которой управление рулевым управлением для поворота и управление рулевым управлением для уклонения от припаркованного транспортного средства 65 не являются непрерывными.
[0066]
Обратимся теперь к Фиг. 7B. Например, блок 88 формирования траектории формирует целевую траекторию движения, по которой собственное транспортное средство 63 в некоторый момент побуждают двигаться по обычной линии 64 движения сразу после того, как собственное транспортное средство 63 повернуло на перекрестке 62 и въехало на пересекающую дорогу 61, а затем побуждают уклониться от припаркованного транспортного средства 65 и проехать рядом с ним, как показано линией 66 движения, и вернуться к обычной линии 64 движения.
Обратимся теперь к Фиг. 8B и 9B. Например, блок 88 формирования траектории формирует целевую траекторию движения, по которой собственное транспортное средство 63 уклоняется от припаркованного транспортного средства 65 и проезжает рядом с ним, как указано линией 66 движения, в некоторый момент возвращается на обычную линию 64 движения и затем поворачивает на перекрестке 73 и въезжает на пересекающую дорогу 72.
[0067]
Блок 89 управления движением приводит в действие группу 50 исполнительных механизмов таким образом, что собственное транспортное средство 63 движется по целевой траектории движения, формируемой блоком 88 формирования траектории. В результате блок 89 управления движением выполняет управление рулевым управлением на основании целевой траектории движения.
Работа
Далее с обращением к Фиг. 11A, 11B, 12A и 12B будет описан пример работы устройства 1 помощи при вождении.
В операции, проиллюстрированной на Фиг. 11A и 11B, управление рулевым управлением объединено, если на дороге, на которую въезжает собственное транспортное средство 63 после поворота, присутствует припаркованное транспортное средство 65.
[0068]
На этапе S1 блок 80 получения дорожной информации для собственного транспортного средства получает дорожную информацию для собственного транспортного средства. Дорожная информация для собственного транспортного средства может быть, например, информацией, представляющей ширину W0 дороги собственного транспортного средства.
На этапе S2 блок 82 получения информации о пересекающих дорогах получает информацию о пересекающих дорогах. Информация о пересекающих дорогах может быть информацией, которая представляет, например, положение (Xin, Yin) и ширину пересекающей дороги и указания сигналов светофора 95, установленного на перекрёстке дороги собственного транспортного средства и пересекающей дороги.
[0069]
На этапе S3 блок 81 получения информации о курсе собственного транспортного средства получает информацию о курсе собственного транспортного средства. Информация о курсе собственного транспортного средства может быть информацией, представляющей, например, движется ли собственное транспортное средство прямо, поворачивает ли налево или поворачивает ли направо на перекрёстке дороги собственного транспортного средства и пересекающей дороги.
На этапе S4 блок 83 получения информации о других транспортных средствах получает информацию о других транспортных средствах. Информация о других транспортных средствах может быть информацией, например, о припаркованном транспортном средстве 65, встречном транспортном средстве, приближающемся к собственному транспортному средству 63 по дороге собственного транспортного средства или пересекающей дороге, и пересекающем транспортном средстве, движущемся по пересекающей дороге и приближающемся к перекрестку дороги собственного транспортного средства и пересекающей дороги.
[0070]
На этапе S5 блок 87 определения объединения определяет, поворачивает ли собственное транспортное средство 63 на перекрестке. Если собственное транспортное средство 63 поворачивает на перекрестке (этап S5: Y), процесс переходит к этапу S9. Если собственное транспортное средство 63 не поворачивает на перекрестке (этап S5: N), процесс переходит к этапу S6.
На этапе S6 блок 88 формирования траектории определяет, присутствует ли припаркованное транспортное средство 65 впереди на маршруте, по которому должно двигаться собственное транспортное средство 63. Если припаркованное транспортное средство 65 присутствует (этап S6: Y), процесс переходит к этапу S7. Если припаркованное транспортное средство 65 отсутствует (этап S6: N), процесс переходит к этапу S8.
[0071]
На этапе S7 блок 88 формирования траектории формирует целевую траекторию движения, по которой собственное транспортное средство 63 уклоняется от припаркованного транспортного средства 65 и проезжает рядом с ним. Затем процесс переходит к этапу S15.
На этапе S8 блок 88 формирования траектории формирует целевую траекторию движения, на которой собственное транспортное средство 63 побуждают двигаться по обычной линии 64 движения. Затем процесс переходит к этапу S15.
[0072]
На этапе S9 блок 87 определения объединения определяет, присутствует ли припаркованное транспортное средство 65 за перекрестком, на котором собственное транспортное средство 63 должно повернуть. То есть блок 87 определения объединения определяет, присутствует ли припаркованное транспортное средство 65 на дороге, на которую въезжает собственное транспортное средство 63 после поворота на перекрестке. Если припаркованное транспортное средство 65 присутствует (этап S9: Y), процесс переходит к этапу S11. Если припаркованное транспортное средство 65 отсутствует (этап S9: N), процесс переходит к этапу S10.
[0073]
На этапе S10 блок 88 формирования траектории формирует целевую траекторию движения, на которой собственное транспортное средство побуждают двигаться по обычной линии 64 движения по дороге, на которую въезжает собственное транспортное средство после поворота на перекрестке. Затем процесс переходит к этапу S15.
На этапе S11 блок 87 определения объединения определяет, является расстояние D между положением поворота и припаркованным транспортным средством равным или меньшим, чем заданное расстояние Dt. Если расстояние D равно или меньше заданного расстояния Dt (этап S11: Y), процесс переходит к этапу S12. Если расстояние D больше заданного расстояния Dt (этап S11: N), процесс переходит к этапу S14.
[0074]
На этапе S12 блок 87 определения объединения определяет, присутствует ли встречное транспортное средство, которое движется по дороге, на которой находится припаркованное транспортное средство 65, и приближается к собственному транспортному средству 63. Если такое встречное транспортное средство присутствует (этап S12: Y), процесс переходит к этапу S14. Если такое встречное транспортное средство отсутствует (этап S12: N), процесс переходит к этапу S13.
[0075]
На этапе S13 блок 87 определения объединения определяет объединение управления рулевым управлением. Блок 88 формирования траектории формирует целевую траекторию 68 движения, по которой собственное транспортное средство 63 поворачивает на перекрестке таким образом, чтобы предусмотреть поперечный интервал между собственным транспортным средством 63 и припаркованным транспортным средством 65 в положении окончания поворота на перекрестке и уклоняется от припаркованного транспортного средства и проезжает мимо него. Затем процесс переходит к этапу S15.
[0076]
На этапе S14 блок 87 определения объединения определяет, что не следует объединять управление рулевым управлением. Блок 88 формирования траектории формирует целевую траекторию движения, в которой управление рулевым управлением для поворота и управление рулевым управлением для уклонения от припаркованного транспортного средства 65 выполняются по отдельности.
В частности, блок 87 определения объединения формирует целевую траекторию движения, по которой собственное транспортное средство 63 в некоторый момент побуждают двигаться по обычной линии 64 движения после поворота на перекрестке и далее побуждают уклониться от припаркованного транспортного средства 65 и проехать рядом с ним, как показано линией 66 движения, и вернуться к обычной линии 64 движения. Затем процесс переходит к этапу S15.
На этапе S15 блок 89 управления движением выполняет управление рулевым управлением на основании целевой траектории движения. Затем процесс завершается.
[0077]
В операции, показанной на Фиг. 12A и 12B, управление рулевым управлением объединено, когда собственное транспортное средство 63 уклоняется от припаркованного транспортного средства 65 и затем поворачивает.
Обработка на этапах S21-S28 является такой же, как и обработка на этапах S1-S8 по Фиг. 11А. На этапе S25, если собственное транспортное средство 63 поворачивает на перекрестке 73 (этап S25: Y) процесс переходит к этапу S29. После обработки на этапе S27 или S28 процесс переходит к этапу S36.
[0078]
На этапе S29 блок 87 определения объединения определяет, присутствует ли припаркованное транспортное средство 65 перед перекрестком, на котором собственное транспортное средство 63 должно повернуть. То есть блок 87 определения объединения определяет, поворачивает ли собственное транспортное средство 63 после уклонения от припаркованного транспортного средства 65. Если припаркованное транспортное средство 65 присутствует (этап S29: Y), процесс переходит к этапу S31. Если припаркованное транспортное средство 65 отсутствует (этап S29: N), процесс переходит к этапу S30.
[0079]
На этапе S30 блок 88 формирования траектории формирует целевую траекторию движения, по которой собственное транспортное средство 63 начинает поворачивать на перекрестке с обычной линии движения. Затем процесс переходит к этапу S36.
На этапе S31 блок 87 определения объединения определяет, является ли расстояние D между положением поворота и припаркованным транспортным средством равным или меньшим, чем заданное расстояние Dt. Если расстояние D равно или меньше заданного расстояния Dt (этап S31: Y), процесс переходит к этапу S32. Если расстояние D больше заданного расстояния Dt (этап S31: N), процесс переходит к этапу S35.
[0080]
На этапе S32 блок 87 определения объединения определяет, имеется ли встречное транспортное средство, которое движется по дороге, на которой находится припаркованное транспортное средство 65, и приближается к собственному транспортному средству 63. Если такое встречное транспортное средство имеется (этап S32: Y), процесс переходит к этапу S35. Если такое встречное транспортное средство отсутствует (этап S32: N), процесс переходит к этапу S33.
На этапе S33 блок 87 определения объединения определяет, имеется ли пересекающее транспортное средство, которое движется по дороге, пересекающей дорогу, на которой находится припаркованное транспортное средство 65, и приближается к перекрестку. Если такое пересекающее транспортное средство имеется (этап S33: Y), процесс переходит к этапу S35. Если такое пересекающее транспортное средство отсутствует (этап S33: N), процесс переходит к этапу S34.
[0081]
На этапе S34 блок 87 определения объединения определяет, что следует объединить управление рулевым управлением. Блок 88 формирования траектории формирует целевую траекторию движения, по которой собственное транспортное средство 63 уклоняется от припаркованного транспортного средства 65 и проезжает рядом с ним, таким образом, чтобы предусмотреть боковой интервал между собственным транспортным средством 63 и припаркованным транспортным средством 65 в положении начала поворота на перекрестке, и затем поворачивает на перекрестке. Затем процесс переходит к этапу S36.
На этапе S35 блок 87 определения объединения определяет, что не следует объединять управление рулевым управлением. Блок 88 формирования траектории формирует целевую траекторию движения, в которой управление рулевым управлением для поворота и управление рулевым управлением для уклонения от припаркованного транспортного средства 65 выполняются по отдельности.
[0082]
Более конкретно, блок 88 формирования траектории формирует целевую траекторию движения, по которой собственное транспортное средство 63 уклоняется от припаркованного транспортного средства 65 и проезжает рядом с ним, как указано линией 66 движения, в некоторый момент возвращается к обычной линии 64 движения и затем поворачивает на перекрестке. Затем процесс переходит к этапу S36.
На этапе S36 блок 89 управления движением выполняет управление рулевым управлением на основании целевой траектории движения. Затем процесс завершается.
[0083]
Полезные эффекты варианта осуществления
(1) Контроллер 40 выполняет обработку для определения наличия или отсутствия припаркованного транспортного средства 65 впереди на маршруте собственного транспортного средства 63, обработку для определения того, должен ли выполняться поворот собственного транспортного средства 63, обработку для определения того, соответствует ли расстояние D между положением поворота, в котором выполняется поворот, и припаркованным транспортным средством 65, заданному условию, обработку для формирования траектории для формирования целевой траектории движения таким образом, чтобы, если расстояние D между положением поворота и припаркованным транспортным средством соответствует заданному условию, собственное транспортное средство 63 проехало рядом с припаркованным транспортным средством 65 в заданном боковом положении с заданным интервалом IL между припаркованным транспортным средством 65 и собственным транспортным средством 63 с одной стороны от припаркованного транспортного средства 65 и, в связи с этим, положение в направлении ширины дороги, которое является либо положением окончания поворота в случае поворота в положении перед положением припаркованного транспортного средства 65, либо положением начала поворота в случае поворота после проезда рядом с припаркованным транспортным средством 65 по маршруту, совпадает с заданным боковым положением, и обработку для выполнения управления рулевым управлением на основании целевой траектории движения.
Такое объединение управления рулевым управлением позволяет уменьшить количество поворотов рулевого управления и плавно уклониться от припаркованного транспортного средства 65.
Настоящее изобретение также имеет полезный технический эффект, состоящий в том, что уменьшение количества поворотов рулевого управления позволяет предотвратить изнашивание механизма рулевого управления и способствует продлению срока службы механизма рулевого управления, управление которым осуществляется автономно при самостоятельном управлении движением или управлении с помощью при вождении, и усовершенствует технологию автономного рулевого управления.
[0084]
(2) Контроллер 40 выполняет вышеописанную обработку для формирования траектории, если собственное транспортное средство 63 поворачивает после того, как оно проехало рядом с припаркованным транспортным средством 65 на маршруте, и расстояние от положения поворота до собственного транспортного средства 63 больше расстояния от положения поворота до припаркованного транспортного средства 65.
Поскольку это управление позволяет непрерывно выполнять управление рулевым управлением для уклонения от припаркованного транспортного средства 65 и управление рулевым управлением для последующего поворота, количество поворотов рулевого управления уменьшается, и возможно плавное уклонение от припаркованного транспортного средства 65.
[0085]
(3) Контроллер 40 выполняет вышеописанную обработку для формирования траектории, если не обнаружено пересекающее транспортное средство, движущееся по дороге, пересекающей дорогу, на которой присутствует припаркованное транспортное средство 65, на перекрестке, на котором выполняется поворот, и приближающееся к перекрестку.
Существует возможность того, что такое пересекающее транспортное средство поворачивает на перекрестке и выезжает на дорогу, на которой присутствует припаркованное транспортное средство 65. По этой причине, если собственное транспортное средство 63 начинает поворот с боковым интервалом IL между собственным транспортным средством 63 и припаркованным транспортным средством 65 (то есть, если собственное транспортное средство 63 приближается к противоположной полосе движения), существует вероятность того, что собственное транспортное средство 63 создаст помеху движению пересекающего транспортного средства.
Объединение управления рулевым управлением, если пересекающее транспортное средство не обнаружено, позволяет предотвратить создание помехи движению пересекающего транспортного средства.
[0086]
(4) Контроллер 40 выполняет вышеописанную обработку для формирования траектории, если сигнал светофора на перекрестке, на котором выполняется поворот, указывает собственному транспортному средству 63 сигнал для продолжения движения.
Это управление позволяет предотвратить остановку собственного транспортного средства 63 на перекрёстке с поперечным интервалом IL, предусмотренным между собственным транспортным средством 63 и припаркованным транспортным средством 65 (то есть если собственное транспортное средство 63 приближается к противоположной полосе движения).
[0087]
(5) Контроллер 40 выполняет вышеописанную обработку для формирования траектории, если собственное транспортное средство 63 поворачивает в положении перед положением припаркованного транспортного средства 65 на маршруте, и расстояние от положения поворота до собственного транспортного средства 63 меньше расстояния от положения поворота до припаркованного транспортного средства 65.
Поскольку это управление побуждает непрерывно выполнять управление рулевым управлением для поворота и управление рулевым управлением для последующего уклонения от припаркованного транспортного средства 65, количество поворотов рулевого управления уменьшается, и можно плавно уклониться от припаркованного транспортного средства 65.
[0088]
(6) Если поворот выполняется на перекрестке, на котором пересекаются друг с другом дороги, каждая из которых имеет множество полос движения, контроллер 40 формирует траекторию движения, по которой собственное транспортное средство 63 меняет полосу движения с полосы движения, находящейся дальше от противоположной полосы движения, на полосу движения, находящуюся ближе к противоположной полосе движения, и затем выполняет поворот, в качестве целевой траектории движения.
Это управление позволяет предотвратить выполнение смены полосы движения во время поворота на перекрестке за счет объединения управления рулевым управлением.
[0089]
(7) Контроллер 40 определяет расстояние между въездом на перекресток дороги, на которой присутствует припаркованное транспортное средство 65, и дорогой, пересекающей упомянутую дорогу, и припаркованным транспортным средством, или расстояние между въездом или выездом с объекта, находящегося вдоль дороги, на которой имеется припаркованное транспортное средство 65, и припаркованным транспортным средством, как расстояние D между положением поворота и припаркованным транспортным средством 65.
Это управление позволяет определить, объединено ли управление рулевым управлением, на основании расстояния D между положением поворота и припаркованным транспортным средством 65.
[0090]
(8) Заданное условие требует, чтобы расстояние D между положением поворота и припаркованным транспортным средством 65 было равным или меньшим, чем заданное расстояние Dt.
Поскольку этот параметр позволяет объединить управление рулевым управлением, если положение поворота и припаркованное транспортное средство 65 находятся близко друг к другу, можно предотвратить выполнение по отдельности управления рулевым управлением для поворота и управления рулевым управлением для уклонения от припаркованного транспортного средства 65 в течение короткого периода времени, и тем самым добиться плавного управления рулевым управлением.
[0091]
(9) Заданное расстояние Dt устанавливается на основании стандартного времени T, необходимого для того, чтобы собственное транспортное средство 63 уклонилось от припаркованного транспортного средства 65 и проехало рядом с ним.
Поскольку то, является ли рулевое управление объединённым, определяется на основании стандартного времени, необходимого для уклонения от припаркованного транспортного средства 65, как описано выше, можно уклониться от припаркованного транспортного средства 65 без дискомфорта.
[0092]
(10) Контроллер 40 выполняет вышеописанную обработку для формирования траектории, если встречное транспортное средство, которое движется по дороге, на которой находится припаркованное транспортное средство 65, не приближается к собственному транспортному средству.
Это управление позволяет предотвратить движение собственного транспортного средства 63 при нахождении вблизи с противоположной полосой движения с боковым интервалом IL, предусмотренным между собственным транспортным средством 63 и припаркованным транспортным средством 65, когда приближается встречное транспортное средство.
[0093]
(11) Контроллер 40 выполняет вышеописанную обработку создания траектории, когда на дороге, на которой присутствует припаркованное транспортное средство, нет разметки полос движения, разделяющей полосу движения и противоположную полосу движения.
Поскольку это управление обеспечивает возможность рулевого управления водителем, в котором управление рулевым управлением не объединено, когда имеется разметка полос движения, можно без дискомфорта уклониться от припаркованного транспортного средства 65.
[0094]
Все примеры и условные формулировки, представленные в данном документе, предназначены для педагогических целей помощи читателю в понимании изобретения и концепций, внесенных автором изобретения в развитие данной области техники, и они не должны рассматриваться как ограничения такими конкретно перечисленными примерами и условиями, а организация таких примеров в описании не связана с демонстрацией преимуществ или недостатков данного изобретения. При том, что были подробно описаны один или более вариантов осуществления настоящего изобретения, следует понимать, что в изобретение могут быть внесены различные изменения, замены и модификации, не выходящие за рамки сущности и объема данного изобретения.
СПИСОК УСЛОВНЫХ ОБОЗНАЧЕНИЙ
[0095]
1 устройство помощи при вождении
10 Группа датчиков состояния окружения
11 Устройство для определения расстояния
12 Камера
20 Навигационная система
21 Навигационный контроллер
22 Устройство определения положения
23 Картографическая база данных
24 Блок отображения
25 Блок управления
26 Блок голосового вывода
27 Блок связи
30 Группа датчиков транспортного средства
31 Датчик скорости транспортного средства
32 Датчик ускорения
33 Гироскопический датчик
34 Датчик угла рулевого управления
35 Датчик ускорения
36 Датчик тормоза
40 Контроллер
41 Процессор
42 Запоминающее устройство
50 Группа исполнительных механизмов
52 Исполнительный механизм рулевого управления
53 Исполнительный механизм открытия акселератора
54 Исполнительный механизм управления тормозом
80 Блок получения дорожной информации для собственного транспортного средства
81 Блок получения информации о курсе собственного транспортного средства
82 Блок получения информации о пересекающих дорогах
83 Блок получения информации о других транспортных средствах
84 Блок получения сигналов транспортного средства
85 Блок определения положения поворота
86 Блок определения положения уклонения
87 Блок определения объединения
88 Блок формирования траектории
89 Блок управления движением.
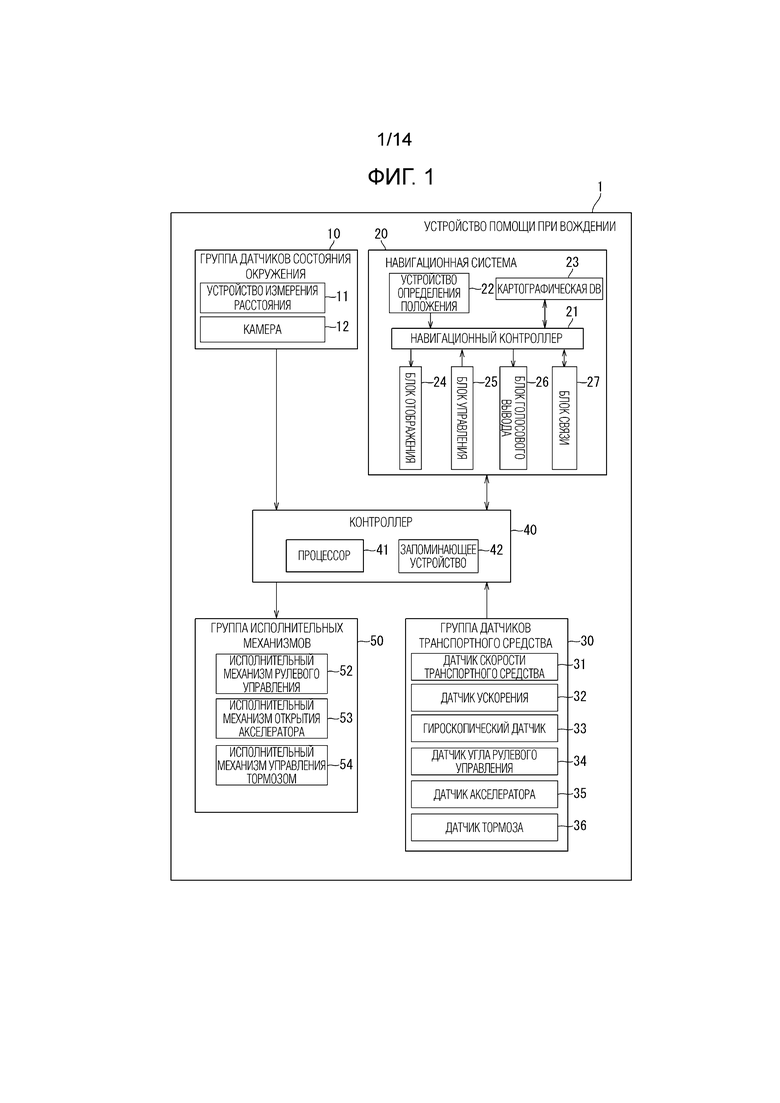
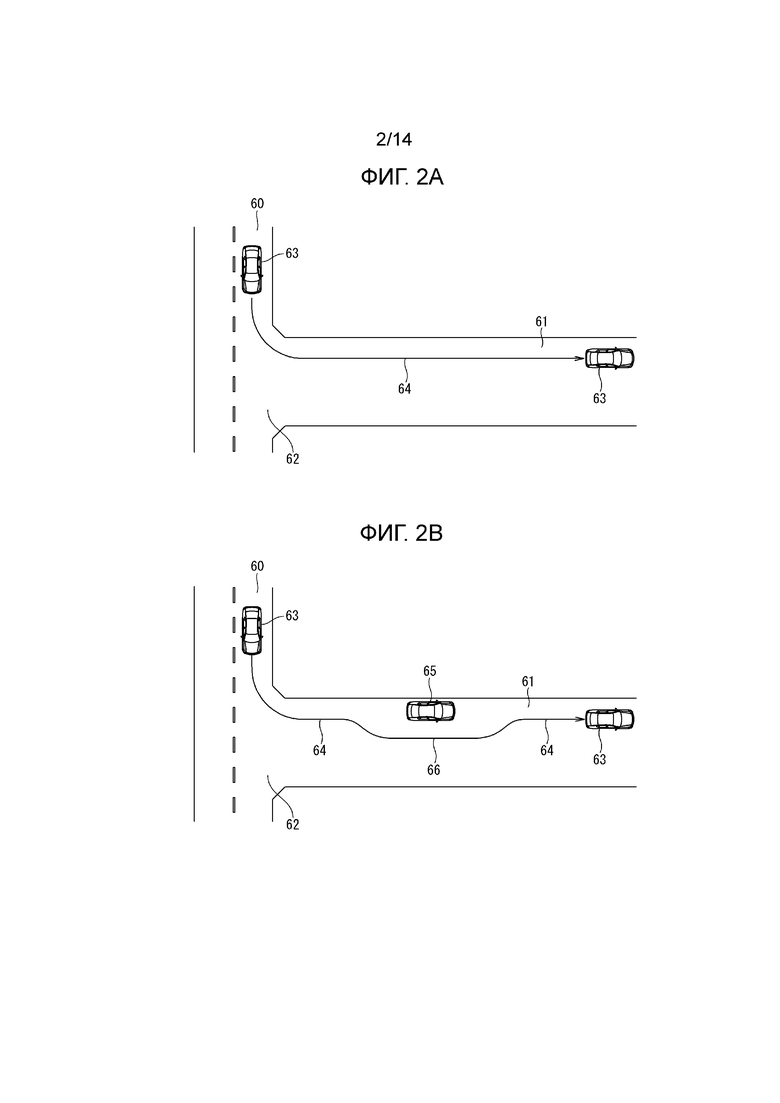
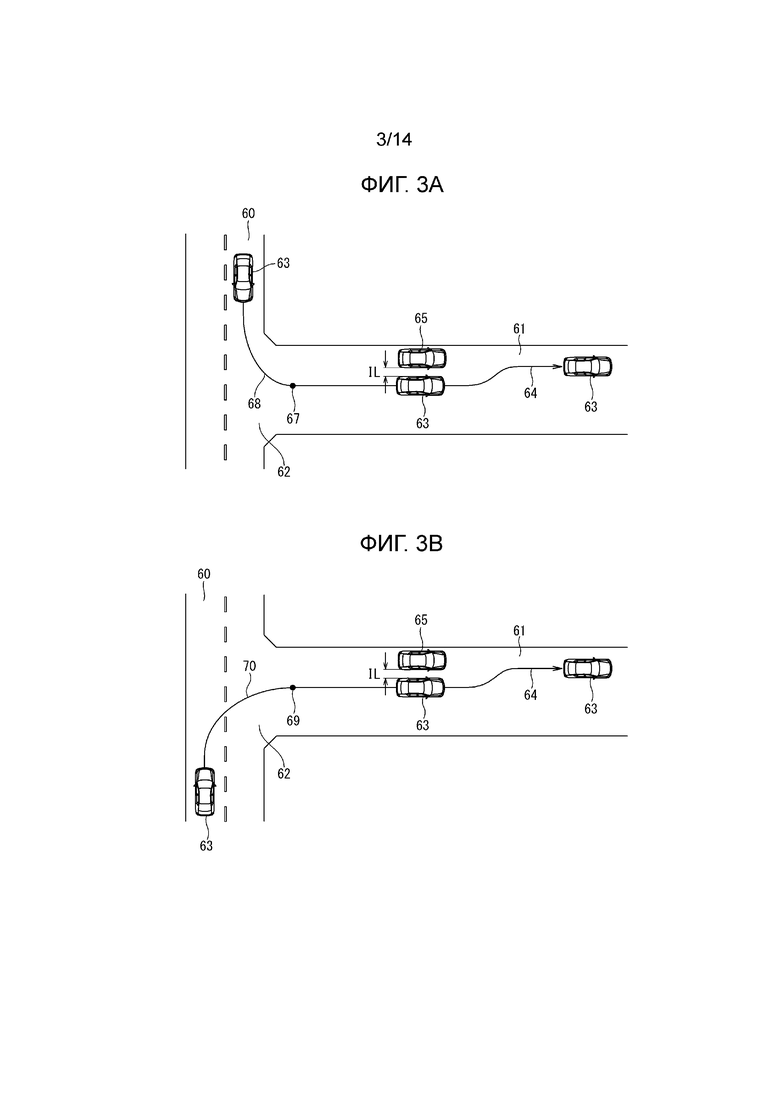
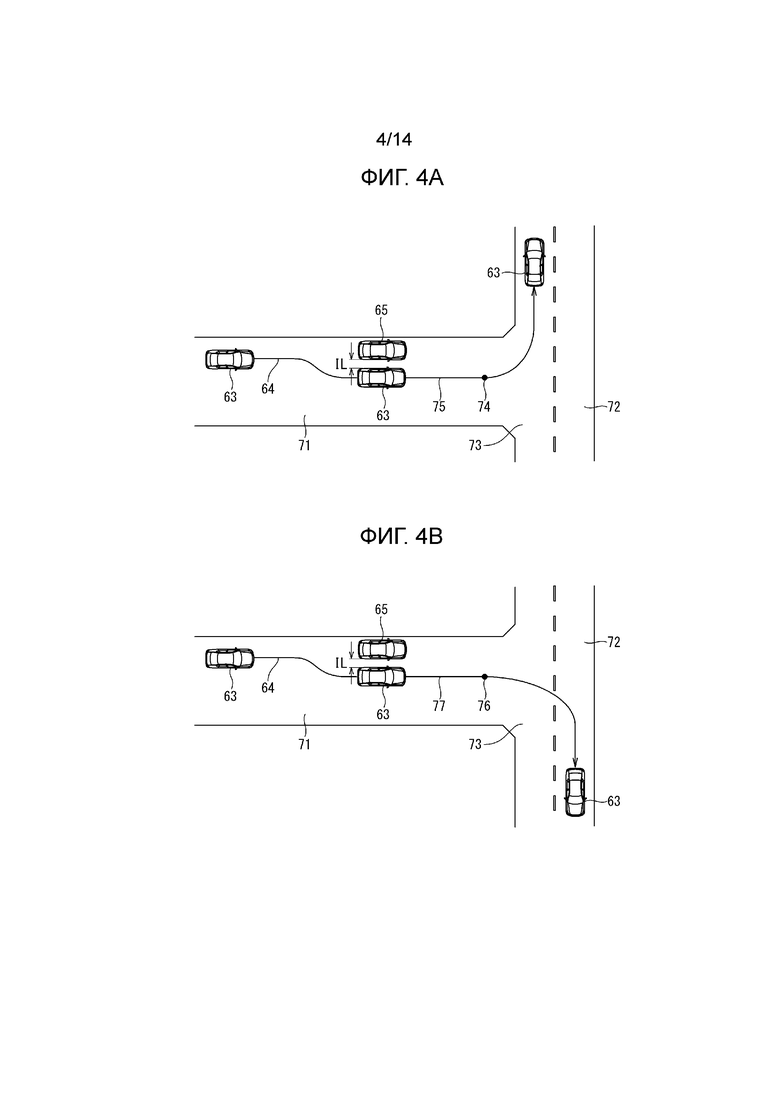
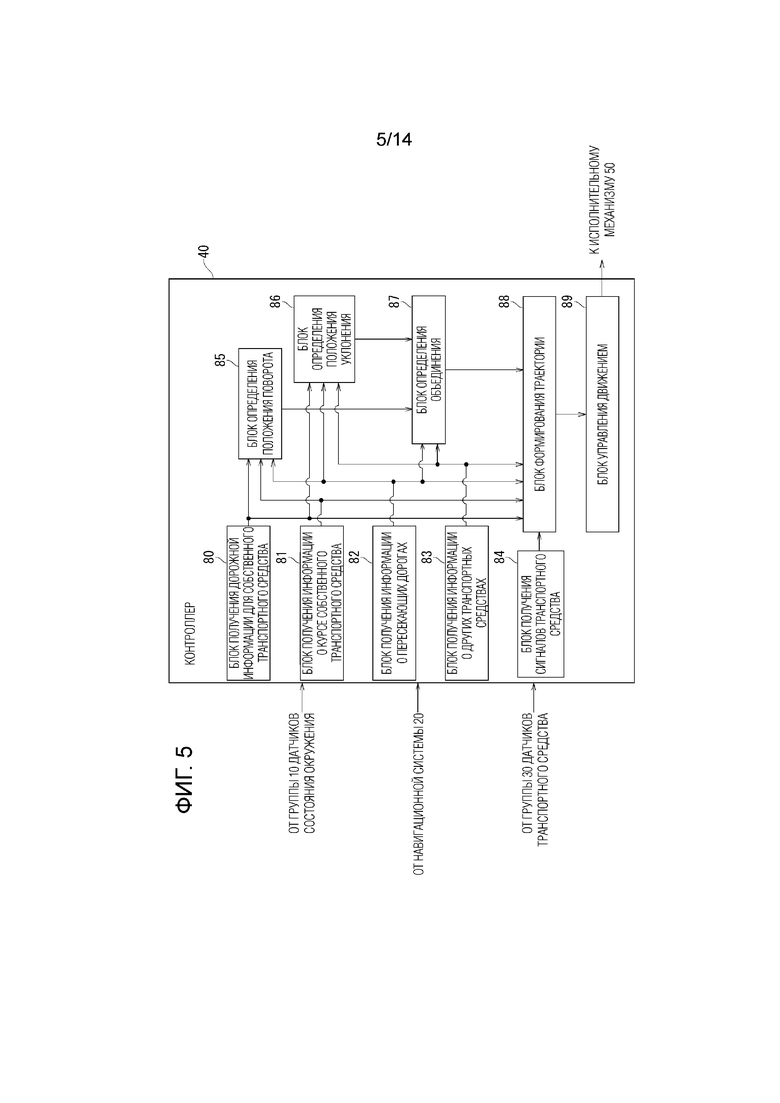
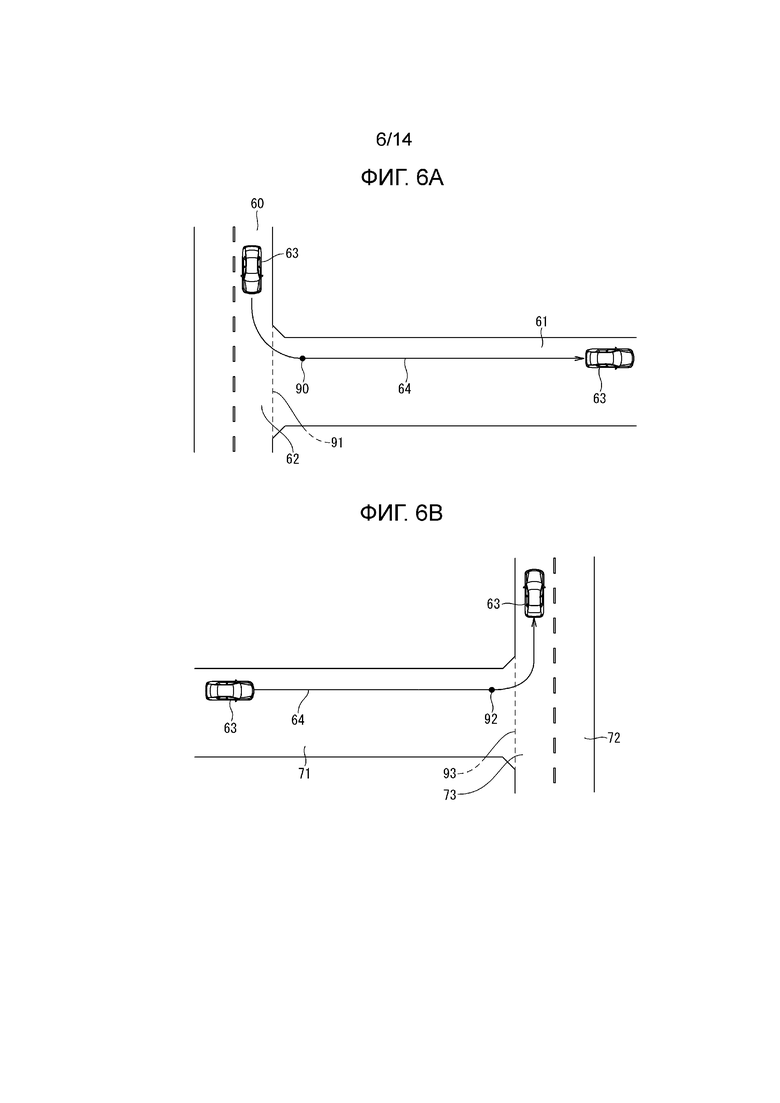

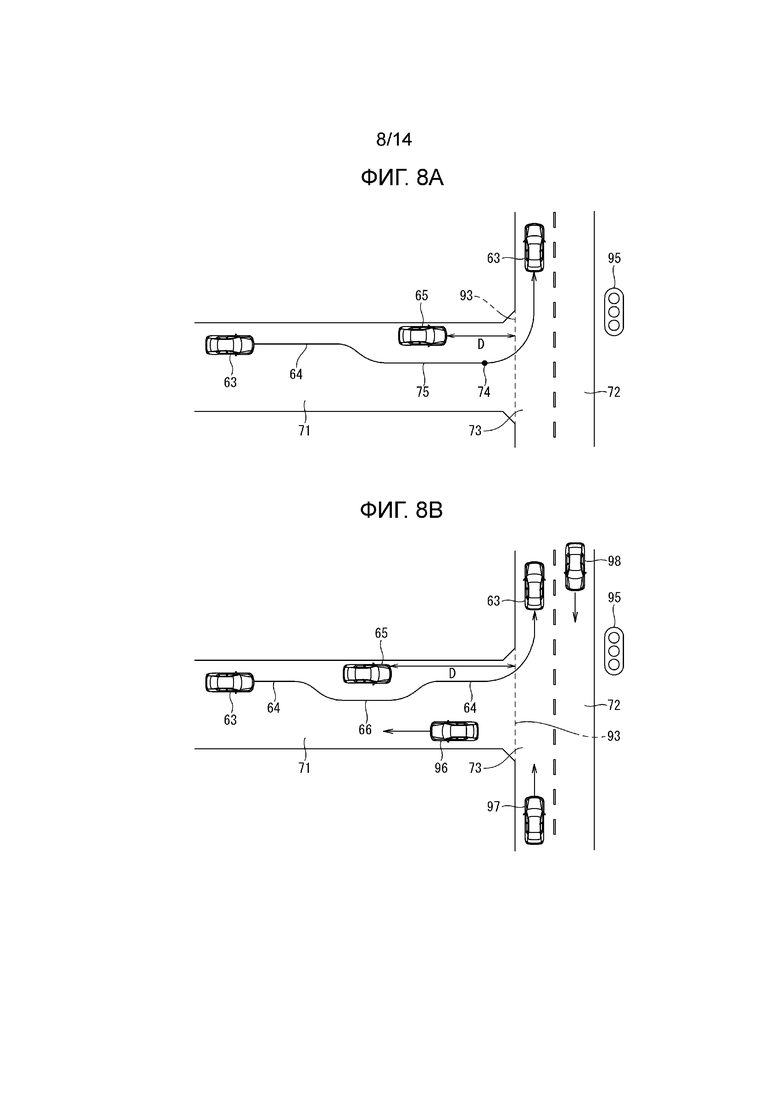
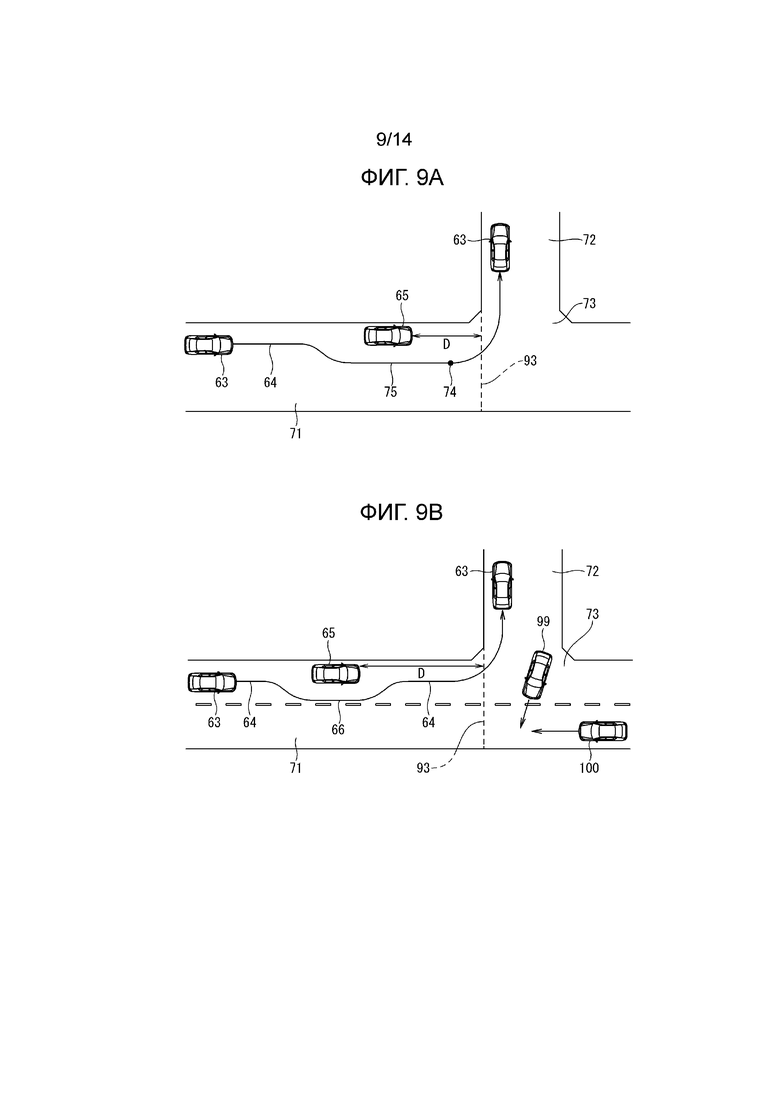
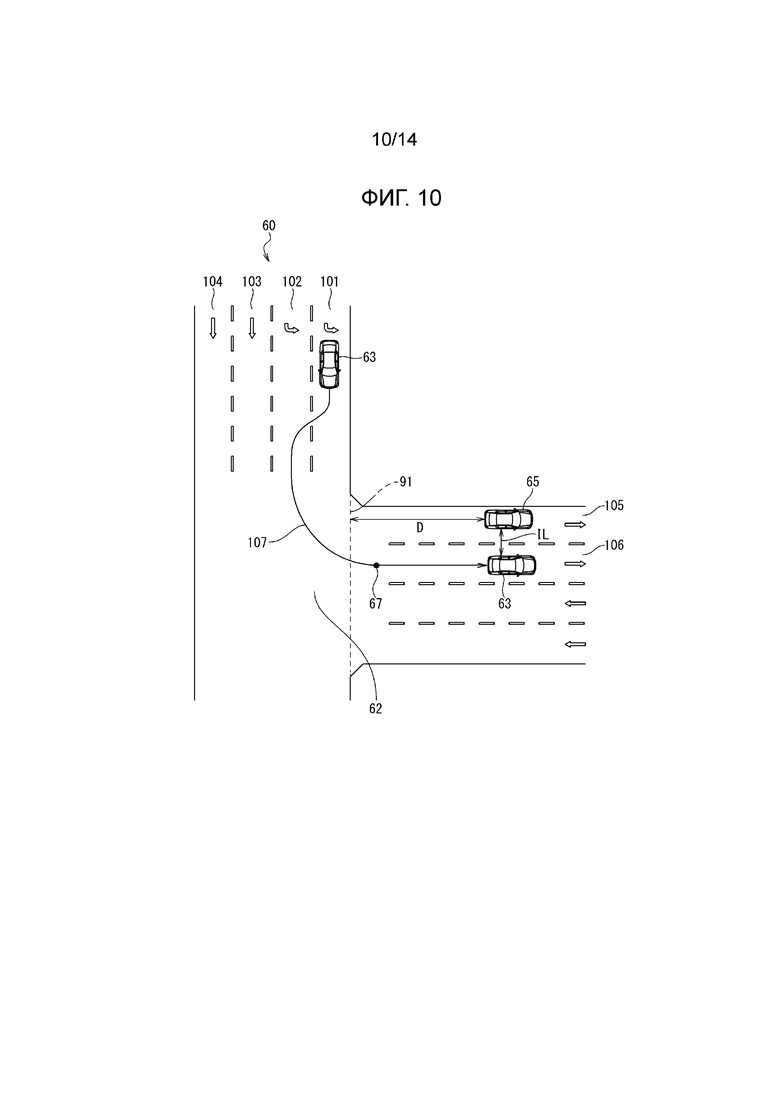

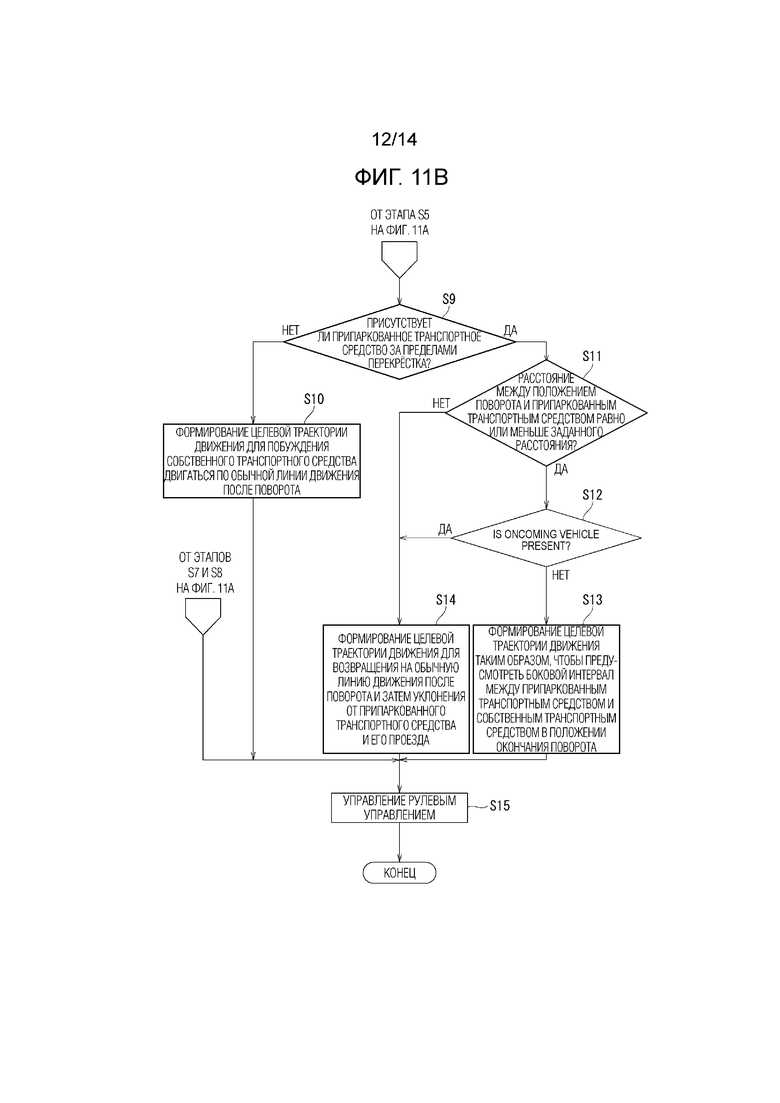
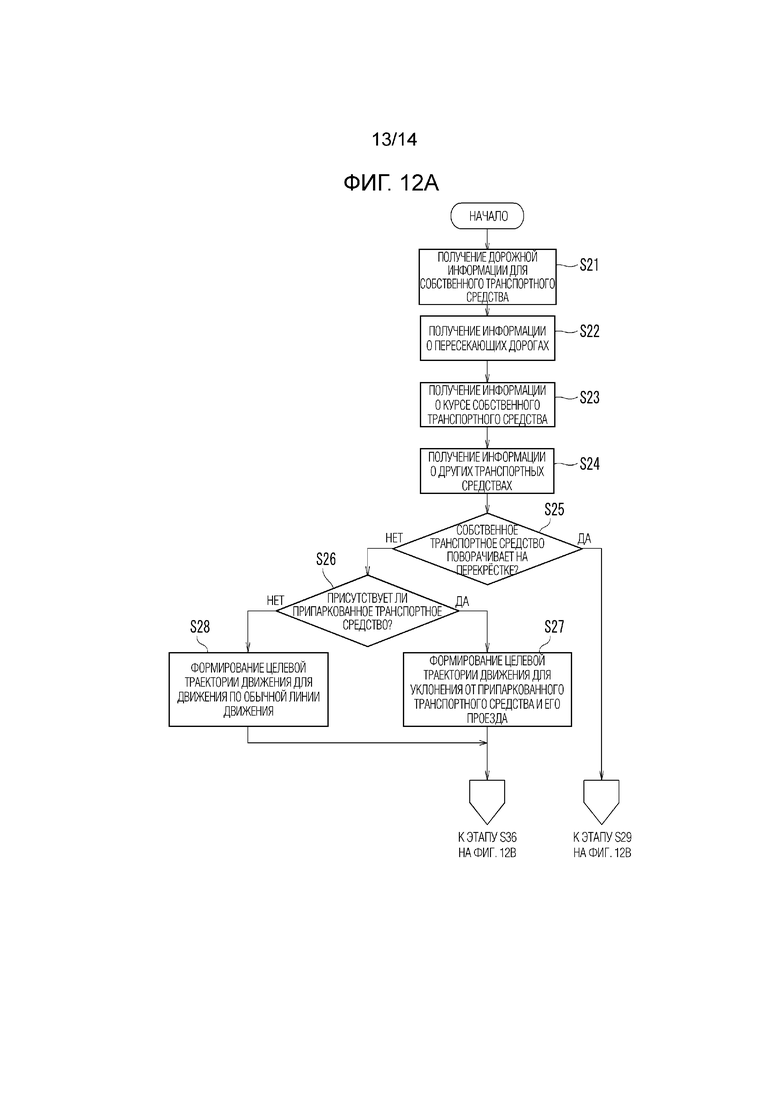
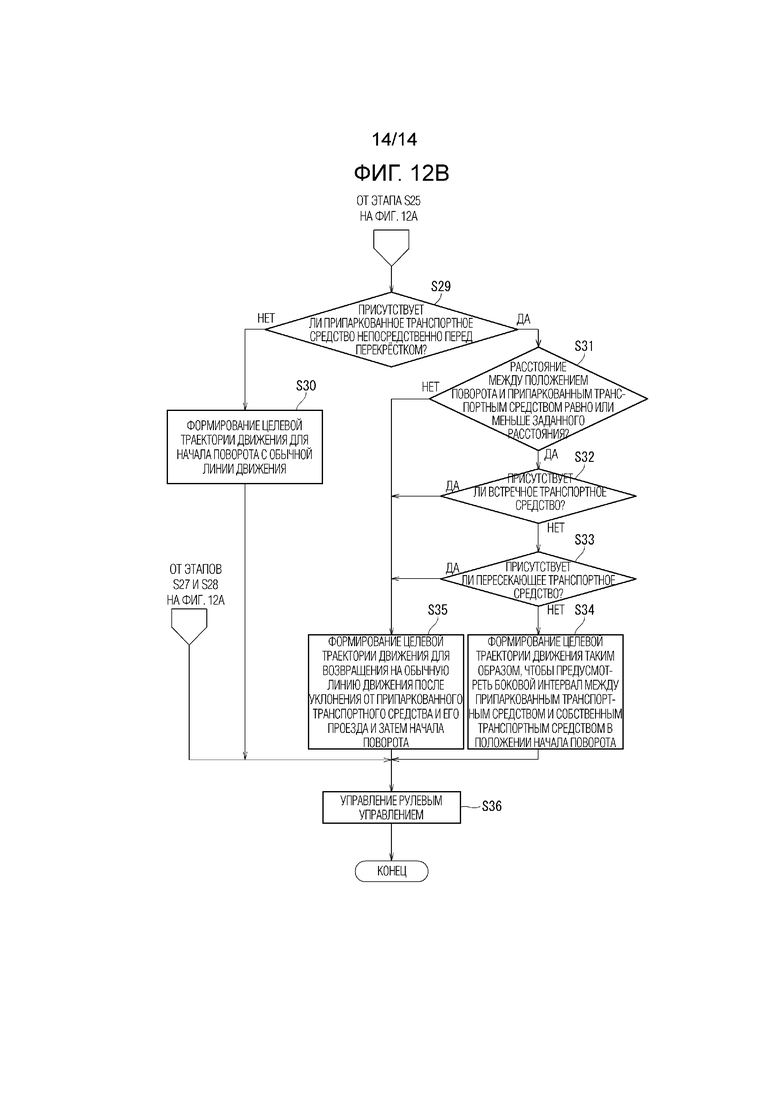
Изобретение относится к способу помощи при вождении. Способ помощи при вождении содержит этапы обработки для определения наличия или отсутствия припаркованного транспортного средства впереди на маршруте движения собственного транспортного средства, обработки для определения того, должен ли выполняться поворот собственного транспортного средства, обработку для определения того, соответствует ли расстояние между положением поворота, и припаркованным транспортным средством заданному условию. Способ также содержит обработку для формирования траектории для формирования целевой траектории движения таким образом, чтобы, если расстояние между положением поворота и припаркованным транспортным средством соответствует заданному условию, собственное транспортное средство проехало рядом с припаркованным транспортным средством в заданном боковом положении с заданным интервалом и положение окончания поворота в случае поворота в положении перед положением припаркованного транспортного средства или положение начала поворота в случае поворота после проезда рядом с припаркованным транспортным средством на маршруте совпадало с заданным боковым положением в направлении ширины дороги и обработку для выполнения управления движением на основании целевой траектории движения. Достигается плавное уклонение транспортного средства от припаркованного транспортного средства. 2 н. и 10 з.п. ф-лы, 21 ил.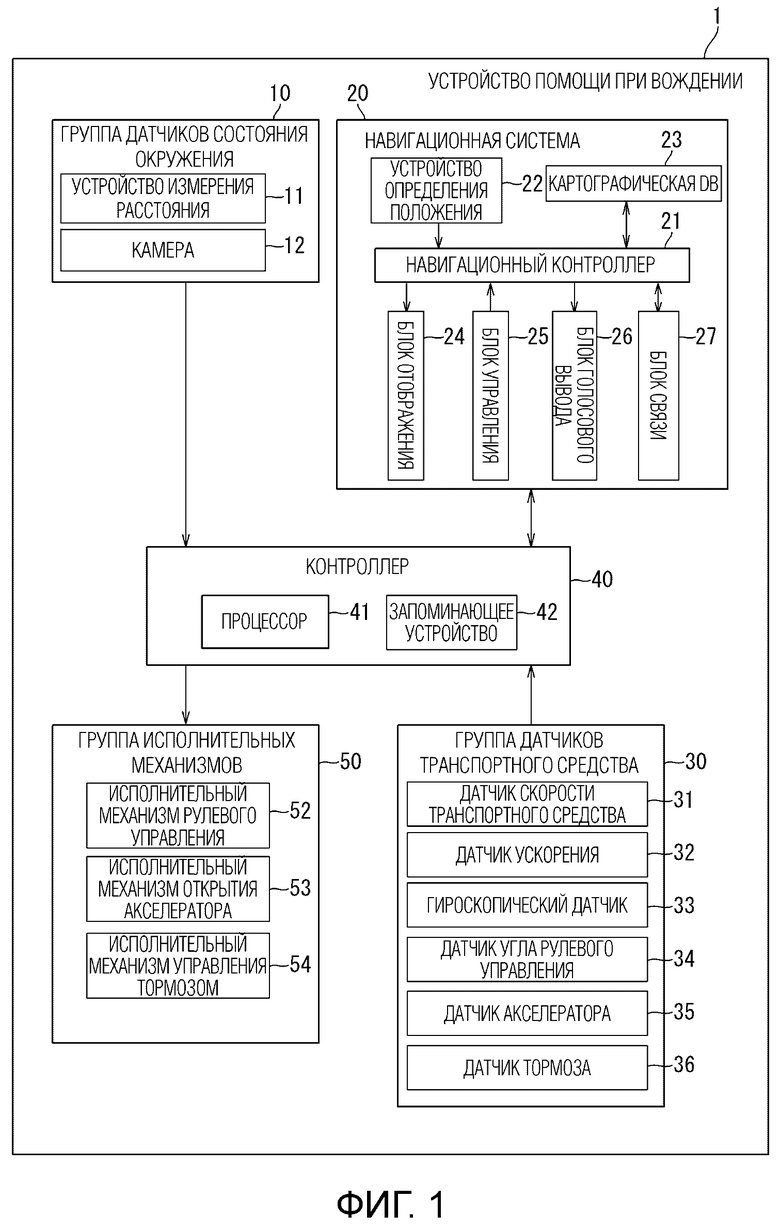
1. Способ помощи при вождении, содержащий побуждение контроллера выполнять:
обработку для определения наличия или отсутствия припаркованного транспортного средства впереди на маршруте движения собственного транспортного средства;
обработку для определения того, должен ли выполняться поворот собственного транспортного средства;
обработку для определения того, соответствует ли расстояние между положением поворота, в котором выполняется поворот, и припаркованным транспортным средством заданному условию;
обработку для формирования траектории для формирования целевой траектории движения таким образом, чтобы, если расстояние между положением поворота и припаркованным транспортным средством соответствует заданному условию, собственное транспортное средство проехало рядом с припаркованным транспортным средством в заданном боковом положении с заданным интервалом, предусмотренным между припаркованным транспортным средством и собственным транспортным средством с одной стороны от припаркованного транспортного средства, и положение окончания поворота в случае поворота в положении перед положением припаркованного транспортного средства или положение начала поворота в случае поворота после проезда рядом с припаркованным транспортным средством на маршруте совпадало с заданным боковым положением в направлении ширины дороги, на которой припарковано транспортное средство; и
обработку для выполнения управления движением на основании целевой траектории движения.
2. Способ помощи при вождении по п. 1, в котором
обработка для формирования траектории выполняется, если собственное транспортное средство поворачивает после проезда рядом с припаркованным транспортным средством на маршруте и расстояние от положения поворота до собственного транспортного средства больше расстояния от положения поворота до припаркованного транспортного средства.
3. Способ помощи при вождении по п. 2, в котором
обработка для формирования траектории выполняется, если не обнаружено другое транспортное средство, движущееся по дороге, пересекающей дорогу, на которой присутствует припаркованное транспортное средство, на перекрестке, на котором выполняется поворот, и приближающееся к перекрестку.
4. Способ помощи при вождении по любому из пп. 2 или 3, в котором:
обработка для формирования траектории выполняется, если сигнал светофора на перекрестке, на котором выполняется поворот, указывает сигнал для продолжения движения для собственного транспортного средства.
5. Способ помощи при вождении по п. 1, в котором
обработка для формирования траектории выполняется, если собственное транспортное средство поворачивает в положении перед положением припаркованного транспортного средства на маршруте и расстояние от положения поворота до собственного транспортного средства меньше расстояния от положения поворота до припаркованного транспортного средства.
6. Способ помощи при вождении по п. 5, в котором
если выполняется поворот на перекрестке, на котором пересекаются друг с другом дороги, каждая из которых имеет множество полос движения, обработка для формирования траектории формирует траекторию движения, по которой собственное транспортное средство выполняет изменение полосы движения с полосы движения, более удаленной от противоположной полосы движения, на другую полосу движения ближе к противоположной полосе движения, и затем выполняет поворот в качестве целевой траектории движения.
7. Способ помощи при вождении по любому из пп. 1-6, в котором:
расстояние между въездом на перекресток дороги, на которой присутствует припаркованное транспортное средство, и дороги, пересекающей упомянутую дорогу, и припаркованным транспортным средством или расстояние между въездом или выездом с объекта, находящегося вдоль дороги, на которой присутствует припаркованное транспортное средство, и припаркованным транспортным средством определяется в качестве расстояния между положением поворота и припаркованным транспортным средством.
8. Способ помощи при вождении по любому из пп. 1-7, в котором:
заданное условие требует, чтобы расстояние между положением поворота и припаркованным транспортным средством было равным или меньшим, чем заданное расстояние.
9. Способ помощи при вождении по п. 8, в котором
заданное расстояние устанавливается на основании стандартного времени, необходимого собственному транспортному средству, чтобы уклониться от припаркованного транспортного средства и проехать рядом с ним.
10. Способ помощи при вождении по любому из пп. 1-9, в котором:
обработка для формирования траектории выполняется, если встречное транспортное средство, движущееся по дороге, на которой находится припаркованное транспортное средство, не приближается к собственному транспортному средству.
11. Способ помощи при вождении по любому из пп. 1-10, в котором:
обработка для формирования траектории выполняется, если на дороге, на которой находится припаркованное транспортное средство, нет разметки полос движения, разделяющей полосу движения и противоположную полосу движения.
12. Устройство помощи при вождении, содержащее контроллер, выполненный с возможностью:
обнаружения присутствия или отсутствия припаркованного транспортного средства впереди на маршруте движения собственного транспортного средства;
определения, следует ли выполнять поворот собственного транспортного средства;
определения, соответствует ли расстояние между положением поворота, в котором выполняется поворот, и припаркованным транспортным средством заданному условию;
выполнения обработки для формирования траектории для формирования целевой траектории движения таким образом, чтобы, если расстояние между положением поворота и припаркованным транспортным средством соответствует заданному условию, собственное транспортное средство проехало рядом с припаркованным транспортным средством в заданном боковом положении с заданным интервалом, предусмотренным между припаркованным транспортным средством и собственным транспортным средством с одной стороны припаркованного транспортного средства, и положение окончания поворота в случае поворота в положении перед положением припаркованного транспортного средства или положение начала поворота в случае поворота после проезда рядом с припаркованным транспортным средством на маршруте совпадает с заданным боковым положением в направлении ширины дороги, на которой припарковано транспортное средство; и
выполнения управления движением на основании целевой траектории движения.
| JP 5790442 B2, 07.10.2015 | |||
| JP 2018202876 A, 27.12.2018 | |||
| JP 2017045130 A, 02.03.2017 | |||
| RU 2017112029 A, 10.10.2018. |

