Изобретение относится к системе для центрального управления одним или несколькими кранами.
В настоящее время башенный поворотный кран эксплуатируют с помощью дистанционного радиоуправления или поста управления в смонтированной на кране кабине крана. Дистанционное радиоуправление является дистанционным управлением, которое имеет на себе находящийся на грунте крановщик. Для дистанционного управления краном крановщик должен всегда иметь зрительный контакт с крюком крана, соответственно, с грузом, следовательно, крановщик должен всегда двигаться вместе с грузом.
Большие поворотные наверху краны эксплуатируются, как правило, с помощью поста управления в кабине крана. Этот пост управления имеет то преимущество, что крановщик, как правило, имеет хороший обзор стройплощадки и в любой момент имеет достаточный зрительный контакт с подвешенным грузом. Пост управления привязывает сильно крановщика к машине, поскольку он лишь при больших перерывах может выполнять трудный и требующий много времени спуск с крана.
Поэтому выполняется поиск системы, которая обеспечивает новое, но тем не менее надежное и безопасное дистанционное управление.
Эта задача решена с помощью системы, согласно признакам пункта 1 формулы изобретения. Предпочтительные варианты выполнения являются предметом зависимых от главного пункта пунктов формулы изобретения.
Согласно пункту 1 формулы изобретения, предлагается система для центрального управления одним или несколькими кранами, при этом система содержит по меньшей мере один кран и по меньшей мере один центральный пост управления. По меньшей мере один кран содержит один или несколько датчиков изображения, которые предназначены для наблюдения за принятым грузом, по меньшей мере за частью окружения крана, а также по меньшей мере за частью структуры крана. Предпочтительно, система датчиков изображения обеспечивает охват по меньшей мере всех подвижных компонентов крана, в идеальном случае всей структуры крана. Например, предусмотрены датчики изображения, которые закреплены на крановой тележке (каретка), и/или на поворотной платформе, и/или на грузовом крюке, соответственно, могут охватывать (регистрировать) по меньшей мере эти компоненты крана. Установка наружных экранов улучшает обзор крановщика.
Кроме того, предусмотрено также двунаправленное связное (коммуникационное) соединение крана с центральным постом управления, с целью передачи создаваемых данных датчиков изображения в центральный пост управления. На стороне поста управления предусмотрен по меньшей мере один индикаторный элемент, который обеспечивает возможность воспроизведения принятых данных изображения. Кроме того, центральный пост управления содержит одно или несколько устройств ввода для ввода команд управления, которые предназначены для передачи через существующие связные соединения в один или несколько исполнительных механизмов крана и/или в управляющий блок крана для выполнения движений крана.
За счет расположения, согласно изобретению, отдельных датчиков изображения на кране обеспечивается достаточное поле обзора для крановщика, с целью обеспечения возможности постоянного обзора необходимых компонентов крана, соответственно, окружения. Нет необходимости в прямом зрительном контакте крановщика с краном, соответственно окружением, достаточно наблюдения за отображаемой на индикаторном элементе информацией. За счет этого расположение поста управления больше не связано с ограничительными условиями, вместо этого достаточно, что обеспечивается возможность стабильного и по возможности без задержки во времени связного соединения между краном и постом управления. В частности, за счет этого центральный пост управления можно интегрировать в офисный контейнер или в аналогичное здание, которое предпочтительно расположено центрально на большой стройплощадке. С этого места можно осуществлять дистанционное управление подлежащими управлению строительными машинами, соответственно, кранами на большой стройплощадке.
Для обеспечения возможности близкого к реальному наблюдения за структурой крана, окружением, а также грузом, особенно предпочтительно, когда отдельные датчики изображения выполнены в виде стереокамер. За счет этого можно создавать стереоскопическую видеоинформацию и передавать в центральный пост управления. В этом варианте выполнения в свою очередь предпочтительно, когда один или несколько индикаторных элементов центрального поста управления выполнены в виде трехмерных мониторов, для обеспечения для крановщика возможно более пластичного и близкого к реальному наблюдения. За счет этого можно, в частности, оценивать расстояния между компонентами крана, соответственно, объектами окружения.
Кроме того, согласно одному другому варианту выполнения, по меньшей мере один кран снабжен одним или несколькими звуковыми датчиками, которые регистрируют шумы крана и/или шумы окружения на стройплощадке. С помощью звуковых датчиков на грузовом кране крановщик может поддерживать связь с персоналом на грунте. Автоматическое устройство распознавания речи может при желании распознавать заданные команды управления краном (например, аварийной остановки) и инициировать соответствующие меры. Эти звуковые сигналы могут также передаваться через связное соединение в центральный пост управления и применяться там для расширенной оценки изображения, соответственно, для простого воспроизведения с помощью громкоговорителя.
Наряду с датчиками изображения, кран может быть снабжен другими датчиками, например, для обнаружения влияний внешнего окружения, такими как датчики дождя, датчики воздуха, датчики температуры, датчики ветра, датчики расстояния и т.д. Также эти окружающие факторы измеряются с помощью датчиков и передаются в виде данных датчиков через двунаправленное связное соединение в центральный пост управления.
Установленное в посту управления и/или в распределительном шкафу средство контролирования регистрирует принимаемые потоки данных датчиков изображения, звуковых датчиков, а также других датчиков и подготавливает их для отображения на индикаторном элементе.
Кроме того, возможно, что также данные датчиков всех других установленных на кране датчиков передаются в центральный пост управления. Сюда входят возможные датчики на исполнительных механизмах, с целью передачи их конкретного положения. Кроме того, могут передаваться данные возможных датчиков давления, силы, а также движения и/или расстояния в центральный пост управления, с целью возможно полного измерения фактического рабочего состояния крана.
Для обеспечения возможности управления зоной контролирования, может быть предусмотрено, что один или несколько датчиков изображения, соответственно, стереокамер автоматически фокусируются с помощью адаптивного регулирования, или же приводятся в действие с помощью выдаваемых с поста управления команд управления. В частности, датчики изображения, соответственно, стереокамеры установлены на структуре крана с возможностью перестановки, в идеальном случае с возможностью поворота. Кроме того, предусмотрены средства перестановки, соответственно, поворота, которые приводятся в действие с помощью подаваемых в центральном посту управления управляющих команд.
Особенно целесообразно, когда предусмотрена возможность подачи команд управления для приведения в действие датчиков изображения, соответственно, стереокамер с помощью одной или нескольких ножных педалей и/или ножных контактов поста управления. В одном конкретном варианте выполнения возможно, что предусмотрена возможность бесступенчатого поворотного движения и/или бесступенчатого изменения фокусного расстояния датчиков изображения, соответственно, стереокамер с помощью по меньшей мере одной ножной педали поста управления. Кроме того, может быть необходимо переключение между различными имеющимися датчиками изображения, соответственно, стереокамерами. Переключение с первого датчика изображения на второй датчик изображения происходит целесообразно посредством приведения в действие по меньшей мере одного ножного контакта поста управления.
Возможно также, что пост управления дополнительно снабжен соединительным интерфейсом для очков воспроизведения данных. За счет этого принимаемые данные датчиков изображения, соответственно, стереокамер можно с помощью очков воспроизведения данных отображать для крановщика. Приведение в действие датчиков изображения, соответственно, стереокамер может достигаться посредством управления движением очков. Например, движение перестановки, соответственно поворота, отдельных датчиков, соответственно, камер может осуществляться посредством движения головы крановщика.
Наряду с индикаторными элементами для отображения данных датчиков, может быть дополнительно предусмотрен по меньшей мере один индикаторный элемент, который обеспечивает возможность известного из кабины крана отображения необходимых для работы крана машинных данных. Наряду с машинными данными может обеспечиваться дополнительно с помощью монитора добавочная информация. Особенно предпочтительно, когда центральный пост управления имеет интерфейс связи по меньшей мере с одним внешним банком данных, через который можно запрашивать, например, инструкции по эксплуатации и/или принципиальные схемы и/или техническую информацию, и/или информацию по техническому обслуживанию подлежащего управлению крана, а затем отображать на индикаторном элементе центрального поста управления.
Кроме того, может быть предусмотрен другой интерфейс связи центрального поста управления с центральным блоком управления заказчика. Через этот интерфейс можно запрашивать, соответственно, принимать специальные данные заказа из центрального блока управления заказчика. Модуль заказа центрального поста управления служит для обработки принимаемого заказа, при этом модуль заказа проверяет требуемую для заказа последовательность движений крана. В рамках этой проверки, например, проверяется, пригоден ли в принципе кран для выполнения заказа, т.е. имеет ли он необходимые показатели производительности для выполнения заказа. Модуль заказа может затем маркировать принятые заказы как выполнимые, соответственно, как не выполнимые. Обработанные заказы квитируются. Кроме того, сообщаются также влияния помех, таких как, например, сильный ветер, в компьютер управления стройплощадки.
Возможно также, что модуль заказа выполнен таким образом, что на основе датчиков изображения могут распознаваться препятствия в окружении крана и учитываться для оценки возможности осуществления заказа. Тем самым наряду с мощностными характеристиками крана также перепроверять окружение крана, чтобы установить, осуществим ли заказ без возмущающих воздействий окружения.
Возможно также, что маркированный как не выполнимый заказ отклоняется модулем заказа, или заказ разделяется, и другой заказ передается на другой кран. Кроме того, возможно, что принятые заказы, которые расцениваются модулем заказа как выполнимые, выполняются по меньшей мере частично автоматически с помощью интегрального блока управления кранами центрального поста управления. В этом случае блок управления кранами центрального поста управления с учетом заказа вмешивается непосредственно в управление краном, в частности, блок управления кранами поста управления устанавливает связь с блоком управления машиной крана и/или непосредственно с исполнительными механизмами крана.
Дополнительно к этому, для автоматического управления краном предпочтительно, когда на кране расположено по меньшей мере одно средство определения местоположения, с целью сообщения в центральный пост управления фактического положения крана. Подходящими средствами определения местоположения являются, например, приемники GPS, соответственно, DGPS-приемники, которые непрерывно или циклически передают географическое положение крана в центральный пост управления.
Кроме того, желательно, что грузовой крюк крана также снабжен по меньшей мере одним средством определения местоположения, с целью измерения географического положения крюка во время работы крана и передачи в центральный пост управления. Также средство определения местоположения грузового крюка крана может быть выполнено в виде приемника GPS, соответственно, в виде приемника DGPS. В принципе, приемник (D)GPS может также применяться на грузовом крюке крана для определения положения крана и сообщения его в центральный пост управления. Датчики расстояния помогают крановщику точно позиционировать груз и помогают при опасности столкновения своевременно останавливать работу крана.
Центральный пост управления может быть снабжен средством контролирования, которое оценивает данные географического положения крюка и на основании этого создает необходимые команды управления, с целью компенсации возможных колебаний груза. Создаваемые команды управления передаются постом управления в блок управления крана, соответственно, непосредственно в подлежащие управлению исполнительные механизмы. Следовательно, возможна реализация внешнего, не обязательного, накладываемого, осуществляемого центральным постом управления демпфирования колебаний груза.
Кроме того, средство контролирования может быть предназначено для контролирования внешней опасности столкновения. Принимаемые данные положения крана и/или грузового крюка оцениваются средством контролирования совместно с принятыми данными датчиков изображения, с целью своевременного распознавания грозящего столкновения крана на стройплощадке с возможными выступающими кромками. В случае грозящего столкновения крана, средство контролирования с помощью блока управления кранами поста управления оказывает влияние на управляющий блок крана. Для этого передаются соответствующие управляющие сигналы с поста управления в кран для замедления движения крана и/или для аварийной остановки работы крана.
Наряду с системой, согласно изобретению, данное изобретение относится также к крану, в частности, в виде башенного поворотного крана, гусеничного крана, мобильного крана для системы, согласно данному изобретению. Следовательно, кран отличается теми же преимуществами и свойствами, что и система, согласно изобретению, за счет чего можно отказаться от их повторения.
Наконец, изобретение относится к центральному посту управления для системы, согласно изобретению, при этом пост управления пригоден для центрального управления одним или несколькими кранами. Также центральный пост управления отличается теми же преимуществами и свойствами, которые были пояснены применительно к системе, согласно изобретению, за счет чего можно отказаться от их повторения.
Камеры крана можно использовать для контролирования стройплощадки. Поля функционирования лежат здесь при несанкционированном доступе к стройполщадке, защиты от воровства и для протоколирования несчастных случаев.
Специальный алгоритм в промышленном персональном компьютере (IPC) анализирует данные камер и оценивает ситуацию на предмет особых событий. В зависимости от регистрируемой ситуации на стройплощадке составляется соответствующее сообщение и передается в вышестоящую управляющую систему. В управляющей системе сообщение может передаваться в соответствии с возможностями связи через электронную почту, SMS или социальную сеть ответственному за безопасность или владельцу.
Кроме того, данные камер или изображения могут передаваться через модем в управляющую систему для оценки ситуации на стройплощадке.
Другие преимущества и свойства изобретения поясняются более подробно ниже на основании показанного на единственной фигуре примера выполнения.
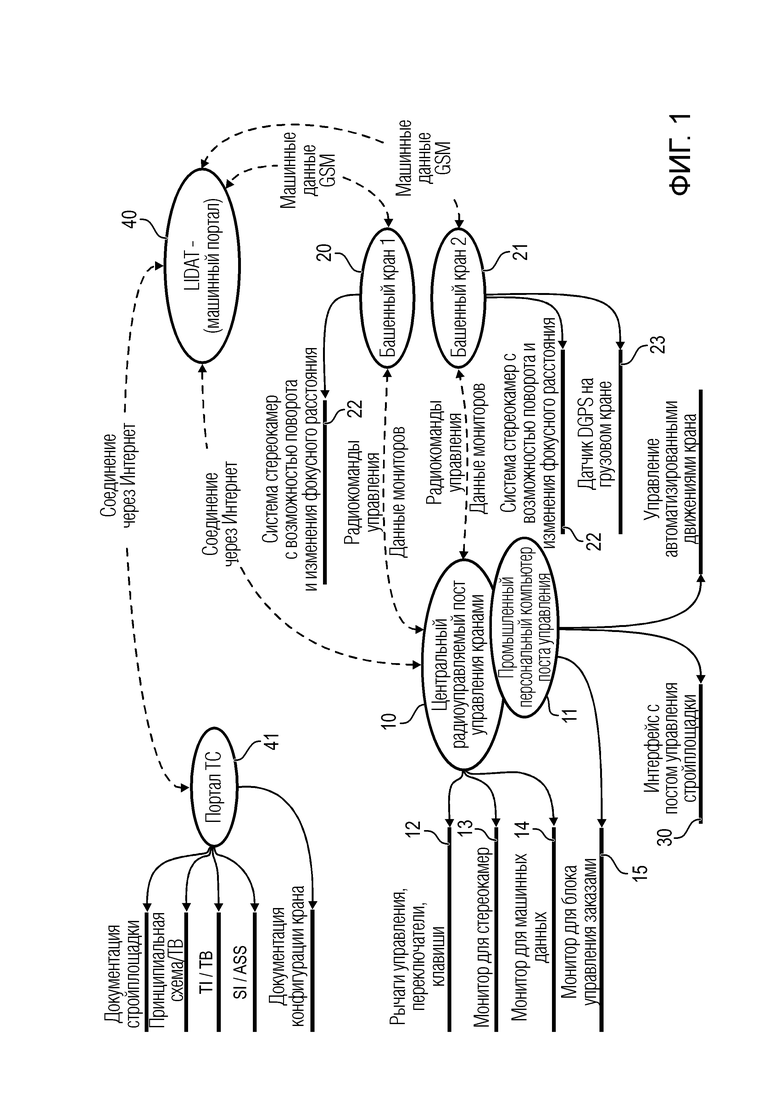
На единственной фигуре схематично показаны отдельные компоненты всей системы и их необходимые соединения связи друг с другом.
В качестве центрального элемента используется центральный управляемый по радио пост 10 управления кранами, основным компонентом которого является промышленный персональный компьютер (IPC) 11. По своим крановым функциям самостоятельный пост 10 управления является почти идентичным посту управления в кабине подлежащего управлению крана 20, 21 (башенного поворотного крана).
Центральный пост 10 управления может быть размещен в офисном контейнере на стройплощадке и служит для дистанционного управления по меньшей мере одним краном 20, 21. Конструкция поста 10 управления состоит также из нескольких элементов 12 управления, таких как управляющие рычаги, переключатели и клавиши, трехмерного монитора 13 для контролирования с помощью изображения крана, монитора 14 для отображения машинных данных и монитора 15 для контролирования заказа.
На кране 20, 21 предусмотрена система 22 стереоскопических камер, отдельные камеры которой закреплены с возможностью поворота на структуре крана. Дополнительно к этому, можно с помощью объективов камеры изменять фокусное расстояние. Система стереоскопических камер служит для наблюдения за краном 20, 21, в частности, за грузом, крановой тележкой и поворотной платформой, а также за его окружением. Кроме того, могут быть предусмотрены звуковые датчики, а также другие датчики для регистрации движений крана, соответственно, состояний крана. Звуковые датчики регистрируют, как правило, окружающие шумы, однако регистрируют также обусловленные работой крана рабочие шумы. Звуковой датчик на грузовом крюке служит для предотвращения аварий и для связи с прицепщиком. Остальные датчики, такие как датчики давления, датчики силы, датчики положения, датчики поворотного механизма, датчик троса и т.д., соответствуют обычно используемым на кране датчикам для управления краном. Сигналы этих датчиков также должны передаваться в центральный пост управления. Наконец, имеется в распоряжении еще датчик DGPS 24 на грузовом крюке, данные положения которого также передаются в пост 10 управления.
Между краном 20, 21 и постом 10 управления имеется двунаправленная радиосвязь, с целью передачи по радио, с одной стороны, данных мониторов, соответственно датчиков, в пост 10 управления, и в противоположном направлении - генерируемых в посту 10 управления команд управления краном в соответствующий кран 20, 21. Сюда относятся управляющие сигналы для приведения в действие исполнительных механизмов, а также те сигналы, которые служат для ориентации указанных выше датчиков 22.
Окружение крана 20, 21 отображается на трехмерном мониторе 12 поста 10 управления. В его зону наблюдения входит груз, стройплощадка и кран 20, 21. Кроме того, движения крана, звуковые сигналы и окружающие факторы оцениваются с помощью средства контролирования поста 10 управления и отображаются. Установленный в посту 10 управления промышленный персональный компьютер (IPC) 11 регистрирует потоки данных камер 22, датчиков крана и окружения. С помощью специальных алгоритмов готовятся данные камер для отображения на трехмерном мониторе 13. Данные датчиков также регистрируются, обрабатываются и отображаются в виде налагаемых изображений или частичных изображений на мониторе 13. Наружные и интегрированные громкоговорители монитора 13 воспроизводят звуковые сигналы крана 20, 21 на посту управления.
Крановщик может с поста 10 управления поворачивать стереоскопические камеры 21 во всех направлениях и приближать изображения посредством изменения фокусного расстояния. При этом используется функция автоматического фокусирования камер 22. Управление функциями камер осуществляется с помощью интегрированного в пост управления адаптивного регулирования и/или с помощью ножных педалей 12 и ножных контактов 12. Ножные педали 12 обеспечивает возможность бесступенчатого поворота и изменения фокусного расстояния камер 22. Ножные контакты служат для переключения камер 22 между крановой тележкой, поворотной платформой и грузовым крюком. Таким образом, крановщик может правильно оценивать ситуацию на стройплощадке и очень точно управлять движениями крана.
В виде опции, могут использоваться также очки с воспроизведением данных, в этом случае можно с помощью движения головой управлять поворотными стереоскопическими камерами.
Монитор 14 крана (EMS) выдает крановщику всю привычную информацию и функции для управления краном, которые он получает также на своем мониторе в кабине крана. Поскольку в этом случае размеры монитора 14 не ограничиваются, можно применять большие мониторы 14. Таким образом, может отображаться также специальная документация крана из системы 40 LIDAT более высокого уровня. К специальной документации крана относятся инструкции по эксплуатации, принципиальные схемы, техническая информация и информация по техническому обслуживанию. Эти данные можно запрашивать при необходимости через существующую связь с Интернетом поста 10 управления опосредованно через машинный портал 40 LIDAT с портала 41 ТС.
Кроме того, система содержит блок автоматизированного управления заказами. Центральный строительный пост 30 передает заказы на транспортировку, включая целевые координаты GPS стройплощадки, в блок управление заказами поста 10 управления. В IPC 11 предусмотрен оценочный модуль со специальным алгоритмом, который вычисляет и проверяет ход прохождения заказа и предлагает крановщику перед выполнением заказа частично автоматизированный ход выполнения (автопилот). Если заказ не может быть выполнен (например, когда груз или дальность действия превышены), то заказ маркируется как не выполнимый. Поскольку камеры 22 крана во взаимодействии со средствами контролирования столкновений поста 10 управления может также распознавать препятствия, то возможно также полностью автоматизированное выполнение движения. Блок управления кранами поста 10 управления генерирует для этого необходимые команды управления, которые затем передаются в соответствующий кран.
За счет этого может быть реализована также функция вызова крана, когда кран 20, 21 снабжен радиопультом с встроенным приемником 23 DGPS. Большие стройплощадки в будущем будут, вероятно, сначала проигрываться виртуально. Выполнение движений заказа можно виртуально опробовать с помощью реального или также виртуального поста управления (WebService) в IPC 11. Необходимые данные крана, такие как груз, вылет стрелы крана и т.д., можно получать либо непосредственно из крана, либо через связь с порталом фирмы Liebherr ʺLIDATʺ 40 получать из конфигуратора крана.
Дополнительно к этому, в IPC 11 можно координаты GPS грузового крана пересчитывать с помощью сигнала коррекции. Вычисленные координаты являются очень точными и могут тем самым применяться для управления демпфирующими колебания движениями крана, которые генерируется блоком управления кранами поста 10 управления и передаются в соответствующий кран 20, 21. Дифференциальное GPS означает, что нормальный сигнал GPS пересчитывается с помощью сигнала коррекции в очень точный сигнал DGPS.
В IPC 11 с помощью средства контролирования столкновений координаты DGPS соотносятся с другими измеряемыми камерами помеховыми движениями и при необходимости принимаются меры безопасности. В критичных зонах уменьшается скорость движения крана и в крайнем случае, перед столкновением, кран выключается с помощью аварийного сигнала.
Изобретение относится к системе для центрального управления одним или несколькими кранами, содержащей по меньшей мере один кран (20, 21) и по меньшей мере один центральный пост (10) управления. Кран содержит один или несколько датчиков (22) изображения для наблюдения за принятым грузом, по меньшей мере за частью окружения крана и по меньшей мере за частью структуры крана. Кран соединен по меньшей мере через одно двунаправленное соединение связи с постом управления для передачи данных датчиков изображения. Пост управления имеет по меньшей мере один индикаторный элемент (13) для отображения в виде изображения принимаемых данных датчиков, а также по меньшей мере одно устройство (12) ввода для ввода команд управления, и предусмотрена возможность передачи команд управления через соединение связи в один или несколько исполнительных механизмов крана и/или в блок управления крана для выполнения движений крана. Достигается надежное и безопасное дистанционное управление. 3 н. и 13 з.п. ф-лы, 1 ил.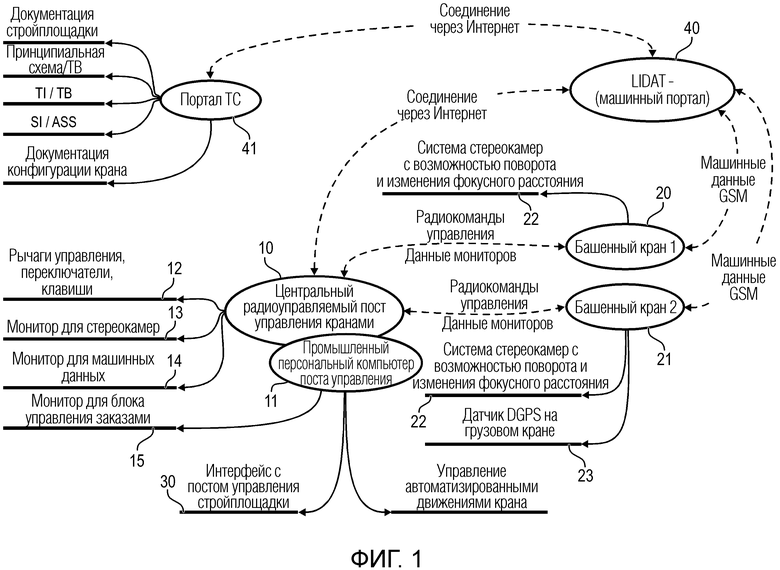
1. Система для центрального управления одним или несколькими кранами, содержащая по меньшей мере один кран и по меньшей мере один центральный пост управления, при этом кран содержит один или несколько датчиков изображения для наблюдения за принятым грузом, по меньшей мере за частью окружения крана, по меньшей мере за частью структуры крана, кран соединен по меньшей мере через одно двунаправленное связное соединение с постом управления для передачи данных датчиков изображения, и при этом пост управления имеет по меньшей мере один индикаторный элемент для отображения в виде изображения принимаемых данных датчиков, а также по меньшей мере одно устройство ввода для ввода команд управления, и предусмотрена возможность передачи команд управления через связное соединение в один или несколько исполнительных механизмов крана и/или в управляющий блок крана для выполнения движений крана, причем упомянутый один или несколько датчиков изображения являются стереокамерами, а упомянутый индикаторный элемент является по меньшей мере одним трехмерным монитором.
2. Система по п.1, отличающаяся тем, что кран снабжен одним или несколькими звуковыми датчиками для регистрации шумов крана и/или шумов окружения и/или датчиков окружения для обнаружения влияний окружения, при этом эти данные датчиков предназначены для передачи в центральный пост управления, и пост управления имеет один или несколько громкоговорителей для воспроизведения принимаемых звуковых сигналов.
3. Система по п.1 или 2, отличающаяся тем, что предусмотрена возможность приема с помощью поста управления сигналов остальных датчиков крана, например датчиков давления, датчиков положения, для регистрации положения компонентов крана, соответственно, исполнительных механизмов крана, и пост управления имеет средство контролирования для оценки выполняемых краном движений на основании этих данных датчиков.
4. Система по любому из пп.1-3, отличающаяся тем, что предусмотрена возможность приведения в действие датчиков изображения, соответственно, стереокамер с помощью вводимых на посту управления команд управления, в частности, датчики изображения, соответственно, стереокамеры установлены на кране с возможностью перестановки, в идеальном случае поворота, при этом движение перестановки, соответственно, поворота выполняется с помощью вводимой на посту управления команды управления.
5. Система по п.4, отличающаяся тем, что предусмотрена возможность ввода команд управления для приведения в действие датчиков изображения/стереокамер с помощью одной или нескольких ножных педалей и/или ножных контактов поста управления, при этом предпочтительно осуществляется бесступенчатое поворотное движение и/или изменение фокусного расстояния датчиков изображения/стереокамер посредством приведения в действие по меньшей мере одной ножной педали поста управления и/или переключения между имеющимися в распоряжении датчиками изображения/стереокамерами крана за счет приведения в действие по меньшей мере одного ножного контакта поста управления.
6. Система по любому из пп.1-5, отличающаяся тем, что пост управления дополнительно снабжен соединительным интерфейсом для очков воспроизведения данных, при этом отображение данных датчиков изображения/стереокамер осуществляется с помощью очков воспроизведения данных, и предусмотрена возможность приведения в действие, в частности перестановки, соответственно, поворота, датчиков изображения/стереокамер за счет движения очков.
7. Система по любому из пп.1-6, отличающаяся тем, что предусмотрен по меньшей мере один другой индикаторный элемент для отображения машинных данных, соответственно, данных датчиков и/или инструкций по эксплуатации, и/или принципиальных схем, и/или технической и/или сервисной информации.
8. Система по любому из пп.1-7, отличающаяся тем, что пост управления содержит интерфейс для приема специальных данных заказа из центрального блока управления заказами, и предусмотрен модуль заказов для оценки принимаемых заказов, при этом модуль заказов проверяет требуемый для заказа ход выполнения движений крана и маркирует заказ как выполнимый, соответственно, как не выполнимый.
9. Система по п.8, отличающаяся тем, что модуль заказов выполнен так, что на основании датчиков изображения обеспечивается возможность распознавания препятствий и учитывается для оценки выполнимости заказа.
10. Система по п.8 или 9, отличающаяся тем, что пост управления содержит блок управления кранами, который после положительной оценки принятого заказа передает управляющие сигналы в кран с целью выполнения автоматизированно по меньшей мере части последовательности движений крана.
11. Система по любому из пп.1-10, отличающаяся тем, что кран содержит по меньшей мере одно средство определения местоположения, в частности приемник GPS, соответственно, приемник DGPS, и предусмотрена возможность сообщения на пост управления географического положения крана.
12. Система по любому из пп.1-11, отличающаяся тем, что грузовой крюк крана снабжен по меньшей мере одним средством определения местоположения, в частности приемником GPS, соответственно, приемником DGPS, и предусмотрена возможность сообщения на пост управления географического положения крюка, при этом блок управления кранами поста управления генерирует предпочтительно на основании передаваемого положения грузового крюка необходимую команду управления и передает в кран с целью компенсации возможных колебаний груза.
13. Система по любому из пп.1-12, отличающаяся тем, что пульт управления содержит средство контролирования столкновений, который оценивает принимаемые данные положения крана и/или грузового крюка и с учетом принятых данных датчиком изображения распознает возможные столкновения крана с выступающими кромками, при этом при грозящем столкновении предусмотрена возможность передачи с блока управления кранами поста управления управляющего сигнала в кран для замедления движений крана и/или для аварийной остановки работы крана.
14. Кран, в частности башенный поворотный кран, или гусеничный кран, или мобильный кран, для системы по любому из пп.1-13.
15. Центральный пост управления для системы по любому из пп.1-13 для центрального управления одним или несколькими кранами.
16. Центральный пост управления по п.15, отличающийся тем, что центральный пост управления имеет интерфейс с блоком контролирования стройплощадки.
| JP 2002274779 A, 25.10.2002 | |||
| EP 1748335 A2, 31.01.2007 | |||
| KR 2004009622 A, 13.01.2004 | |||
| Устройство для дозирования жидкости | 1939 |
|
SU59554A1 |
| СПОСОБ УПРАВЛЕНИЯ И ЗАЩИТЫ ОТ СТОЛКНОВЕНИЙ РАБОТАЮЩИХ В ГРУППЕ БАШЕННЫХ КРАНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2326046C1 |

