Изобретение относится к авиационным подвесным контейнерам и может быть использовано для перемещения на внешней подвеске воздушных судов различных грузов, а также монтажа специального оборудования для технического обслуживания и ремонта воздушных судов.
Известно устройство для транспортировки авиационных грузов [RU 2499743 С1, МПК B64D 9/00 от 15.08.2012] предназначенное для транспортировки различных грузов и оборудования.
Недостатком вышеуказанного устройства являются большие временные затраты необходимые при развертывании и свертывании устройства для транспортировки авиационных грузов.
Наиболее близким по технической сущности и достигаемому техническому результату (прототип) является авиационный подвесной контейнер [RU 2677734 С1, МПК B64D 9/00 от 24.01.2018], содержащий обтекатели, стрингеры, шпангоуты, газотурбинный двигатель, мобильный комплекс электропитания и автоматизированного контроля технического состояния бортового оборудования, а также узлы подвески и три пары убирающихся шасси, ленточную лебедку с храповым механизмом и водило.
Недостатком устройства являются большие временные затраты необходимые при развертывании и свертывании авиационного подвесного контейнера.
Техническим результатом предлагаемого изобретения является снижение временных затрат при развертывании и свертывании авиационного подвесного контейнера за счет автоматизации процесса подъема и снятия контейнера с балочного держателя летательного аппарата.
Технический результат достигается тем, что в авиационный подвесной контейнер, содержащий обтекатели, стрингеры, шпангоуты, узлы подвески, водило и, по меньшей мере, две пары убирающихся шасси с ленточными лебедками дополнительно введены последовательно соединенные контактный датчик, установленный на узле подвески и блок управления, а также пульт управления, выход которого соединен со вторым входом блока управления, N механизмов натяжения с узлами крепления на колесе каждой пары убирающихся шасси и N датчиков силы натяжения, которые взаимодействуют с первым концом ленточной лебедки каждой пары шасси соответственно, при этом вход N-го механизма натяжения соединен с j+1 выходом блока управления, а выход соединен с входом соответственного датчика силы натяжения, выход которого соединен с n+3 входом блока управления, при этом N-й механизм натяжения взаимодействует со вторым концом ленточной лебедки n-й пары убирающихся шасси.
Сущность изобретения заключается в полной автоматизации процесса подъема и опускания авиационного подвесного контейнера при его креплении и снятии с балочного держателя летательного аппарата. Данный эффект достигается путем ввода блока управления, контактного датчика, пульта управления и датчиков силы натяжения и механизмов натяжения. С помощью пульта управления происходит подача сигнала на блок управления с целью запуска механизма натяжения. Контактный датчик и датчик силы натяжения срабатывают при поднятии и опускании контейнера соответственно, тем самым подают сигнал на блок управления, который подает сигнал на механизм натяжения с целью прекращения его работы.
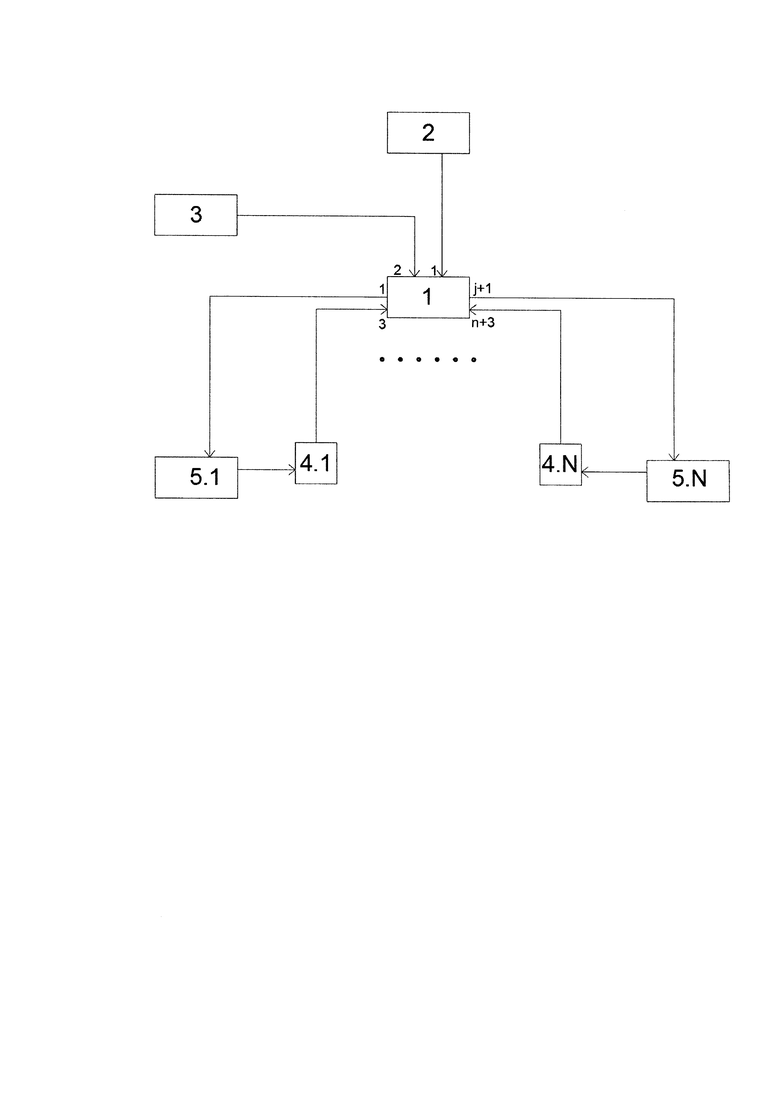
На чертеже приведена структурная схема изобретения, где обозначено: 1 - блок управления, 2 - контактный датчик, 3 - пульт управления, 4 - датчик силы натяжения, 5 - механизм натяжения.
Последовательно соединены контактный датчик 2, установленный на узле подвески и блок управления 1, также введен пульт управления 3, выход которого соединен со вторым входом блока управления 1, а также дополнительно введено N механизмов натяжения 5 с узлами крепления на колесе каждой пары убирающихся шасси и N датчиков силы натяжения 4, которые взаимодействуют с первым концом ленточной лебедки каждой пары шасси соответственно, при этом вход N-го механизма натяжения 5 соединен с j+1 выходом блока управления 1, а выход соединен с входом соответствующего датчика силы натяжения 4, выход которого соединен с n+3 входом блока управления 1, при этом N-й механизм натяжения 5 взаимодействует со вторым концом ленточной лебедки n-й пары убирающихся шасси.
Контактный датчик реагирует на соприкосновение узла подвески контейнера и балочного держателя летательного аппарата и может быть выполнен в качестве концевого выключателя кнопочного типа [RU 2239251 С1, МПК: Н01Н 3/12, от 27.10.2004 г.].
Блок управления имеет j+1 выходов и n+3 входов, где j и n выходы и входы N механизмов натяжения и N датчиков силы натяжения, и может быть выполнен в виде AVR микроконтроллера [https://ph0enlx.net/70-avr-microcontroller-applications-where-to-use.html].
Механизм натяжения может быть выполнен в виде реверсивного электропривода лебедки транспортного средства [RU 2115217 С1, МПК: Н02Р 7/06 от 10.07.1998 г.].
Пульт управления предназначен для подачи сигнала на блок управления и может быть выполнен в виде устройства ввода и вывода информации [RU 2524852 С2, МПК: G06F 3/00 от 10.08.2014 г.].
Датчик силы натяжения предназначен для определения нижней мертвой точки при опускании контейнера за счет изменения силы натяжения троса ленточной лебедки при соприкосновении с поверхностью аэродрома. Датчик силы натяжения может быть выполнен в виде S-образного тензодатчика [http://sensor-sms.ru/foll-catalogue-2/product/s-obraznvv-tenzodatchik-bm3].
Поднятие контейнера с целью его крепления к летательному аппарату будет осуществляться следующим образом. Лентой лебедки через колесо каждой пары убирающихся шасси и технологические кольца охватывается балочный держатель летательного аппарата, после чего лента лебедки продевается через второе колесо пары убирающихся шасси и с помощью узла крепления крепится к первому колесу каждой пары убирающихся шасси. Далее оператор с помощью пульта управления 3 через блок управления 1 подает сигнал на механизм натяжения 5, с целью его запуска. При соприкосновении узла крепления контейнера и балочного держателя летательного аппарата от контактного датчика 2 поступает сигнал на блок управления 1, который подает сигнал на механизм натяжения 5, который, в свою очередь, прекращает свою работу.
При снятии контейнера происходит следующее. Колеса шасси вручную переводят в рабочее (то есть в выпущенное) положение. Затем лентой лебедки через первое колесо каждой пары убирающихся шасси подвесного контейнера охватывают балочный держатель воздушного судна через имеющиеся в нем технологические отверстия, продевается через второе колесо пары убирающихся шасси и с помощью узла крепления крепится к первому колесу каждой пары убирающихся шасси. Далее оператор с помощью пульта управления 3 через блок управления 1 подает сигнал на механизм натяжения 5, который, в свою очередь, осуществляет автоматический спуск контейнера на поверхность аэродрома. При соприкосновении контейнера с поверхностью аэродрома происходит изменение силы натяжения троса ленточной лебедки из-за чего от датчика силы натяжения 4 поступает сигнал на блок управления 1, который подает сигнал на механизм натяжения 5 с целью прекращения его работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВИАЦИОННЫЙ ПОДВЕСНОЙ КОНТЕЙНЕР | 2018 |
|
RU2677734C1 |
| УНИВЕРСАЛЬНЫЙ МОДУЛЬ-КОНТЕЙНЕР ДЛЯ ВСЕХ ВИДОВ ТРАНСПОРТА | 2020 |
|
RU2764859C2 |
| СПОСОБ ИСПОЛЬЗОВАНИЯ УНИВЕРСАЛЬНОГО МОДУЛЬ-КОНТЕЙНЕРА | 2020 |
|
RU2759187C1 |
| АВАРИЙНО-СПАСАТЕЛЬНАЯ СИСТЕМА ДЛЯ СПАСЕНИЯ ПАССАЖИРОВ, ЭКИПАЖА И ГРУЗОВ ПРИ АВАРИИ САМОЛЕТА В ВОЗДУХЕ | 1998 |
|
RU2152335C1 |
| САМОЛЕТ-ЗАПРАВЩИК | 1994 |
|
RU2142897C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОМАНЕВРЕННЫЙ СВЕРХЗВУКОВОЙ САМОЛЕТ, ЕГО АГРЕГАТЫ ПЛАНЕРА, ОБОРУДОВАНИЕ И СИСТЕМЫ | 1996 |
|
RU2207968C2 |
| АКВААЭРОКОСМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2626418C2 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ И ТРАНСПОРТИРОВКИ ДЛИННОМЕРНЫХ ИЗДЕЛИЙ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ | 1992 |
|
RU2103187C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2024 |
|
RU2825903C1 |
| НАДВОДНО-ПОДВОДНЫЙ КОРАБЛЬ С ПАЛУБНЫМ АВИАЦИОННЫМ УДАРНЫМ КОМПЛЕКСОМ | 2019 |
|
RU2721808C1 |
Авиационный подвесной контейнер содержит обтекатели, стрингеры, шпангоуты, узлы подвески, водило, по меньшей мере, две пары убирающихся шасси с ленточными лебедками, последовательно соединенный контактный датчик, установленный на узле подвески, и блок управления, пульт управления, блок управления, N механизмов натяжения с узлами крепления на колесе каждой пары шасси, N датчиков силы натяжения. Обеспечивается снижение временных затрат при развертывании и свертывании авиационного подвесного контейнера. 1 ил.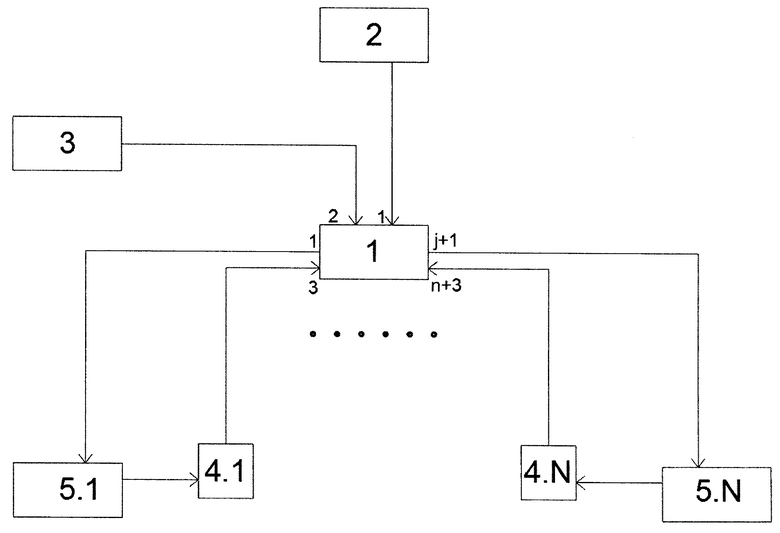
Авиационный подвесной контейнер, содержащий обтекатели, стрингеры, шпангоуты, узлы подвески, водило, по меньшей мере, две пары убирающихся шасси с ленточными лебедками, отличающийся тем, что дополнительно введены последовательно соединенные контактный датчик, установленный на узле подвески, и блок управления, а также пульт управления, выход которого соединен со вторым входом блока управления, N механизмов натяжения с узлами крепления на колесе каждой пары шасси и N датчиков силы натяжения, которые взаимодействуют с первым концом ленточной лебедки каждой пары шасси соответственно, при этом вход n-го механизма натяжения соединен с j+1 выходом блока управления, а выход соединен с входом соответствующего датчика силы натяжения, выход которого соединен с n+3 входом блока управления, при этом N-й механизм натяжения взаимодействует со вторым концом ленточной лебедки n-й пары убирающихся шасси.
| АВИАЦИОННЫЙ ПОДВЕСНОЙ КОНТЕЙНЕР | 2018 |
|
RU2677734C1 |
| УСТРОЙСТВО ДЛЯ ТРАНСПОРТИРОВКИ АВИАЦИОННЫХ ГРУЗОВ | 2012 |
|
RU2499743C1 |
| СИСТЕМА ВНЕШНЕЙ ПОДВЕСКИ ГРУЗА К ВЕРТОЛЕТУ | 2001 |
|
RU2189925C1 |
| GB 1316513 A, 09.05.1973 | |||
| CN 109863084 A, 07.06.2019. | |||

