Изобретение относится к сервисной робототехнике. Оно, в частности, может быть использовано для замены аккумуляторных батарей и заправки опрыскиваемой жидкостью сельскохозяйственных роботов-опрыскивателей.
Известны различные конструкции беспилотной авиационной техники, успешно используемой в сельском хозяйстве для обработки надземной части растений способом распыления жидкости.
Известен патент РФ №2586142 «Робототехнический комплекс для автоматизированной авиационной химической обработки растений и способ его применения» Изобретение относится к сельскохозяйственной робототехнике и может быть использовано для автоматизированной авиационной химической обработки растений. Робототехнический комплекс для химической обработки растений включает хотя бы один дрон-опрыскиватель и хотя бы один сервисный наземный мобильный робот. Дрон-опрыскиватель выполнен в виде малогабаритного автоматического беспилотного летательного аппарата с вертикальным взлетом и посадкой. Дрон-опрыскиватель оснащен опрыскивающим оборудованием, сенсорами внутренней и внешней среды, вычислительными средствами, средствами навигации, ориентации и связи, энергоустановкой, средствами для хранения носителя энергии и химических материалов, устройством сопряжения с сервисным роботом. Сервисный наземный мобильный робот выполнен в виде подвижной транспортной платформы. Сервисный робот оснащен средствами для хранения и передачи носителей энергии, приготовления, хранения и передачи химических материалов, площадками для хранения и транспортировки, взлета и посадки дронов-опрыскивателей. Обеспечивается автоматизация химической обработки растений, повышается производительность, снижается себестоимость обработки.
Наиболее близким к заявленному изобретению по конструкции и назначению является беспилотный летательный аппарат R-MAX фирмы Yamaha, дополнительно оснащенный навесным опрыскивающим оборудованием и двумя пластиковыми баллонами общей емкостью 16 л [http://rmax.yamaha-motor.com.au/].
Задача, на решение которой направлено предлагаемое изобретение, заключается в автоматизации процесса обслуживания техники с помощью сервисного мобильного робота и комплекта совместимого с роботом устройств, монтируемых на обслуживаемых объектах.
Техническая задача решена за счет того, что используется сервисный мобильный робот, оснащенный самоходным шасси со всеми необходимыми средствами для автоматического управления, включая блок управления с коммуникационными интерфейсами, энергосиловой блок, комплект датчиков, контроллеров и исполнительных устройств и иных средств коммуникации и преобразования энергии и сигналов, а также монтируемые на обслуживаемых объектах комплекты совместимых с сервисным мобильным роботом устройств для обмена сменными модулями и жидкими материалами, отличающиеся тем, что в состав конструкции сервисного мобильного робота кроме шасси дополнительно входит стыковочно-обменная платформа и комплект устройств гидравлической системы, а в состав комплекта оборудования обслуживаемого объекта входят стыковочно-сцепные устройства, устройство хранения сменного модуля, сменный модуль и заправочный порт.
Описание устройства.
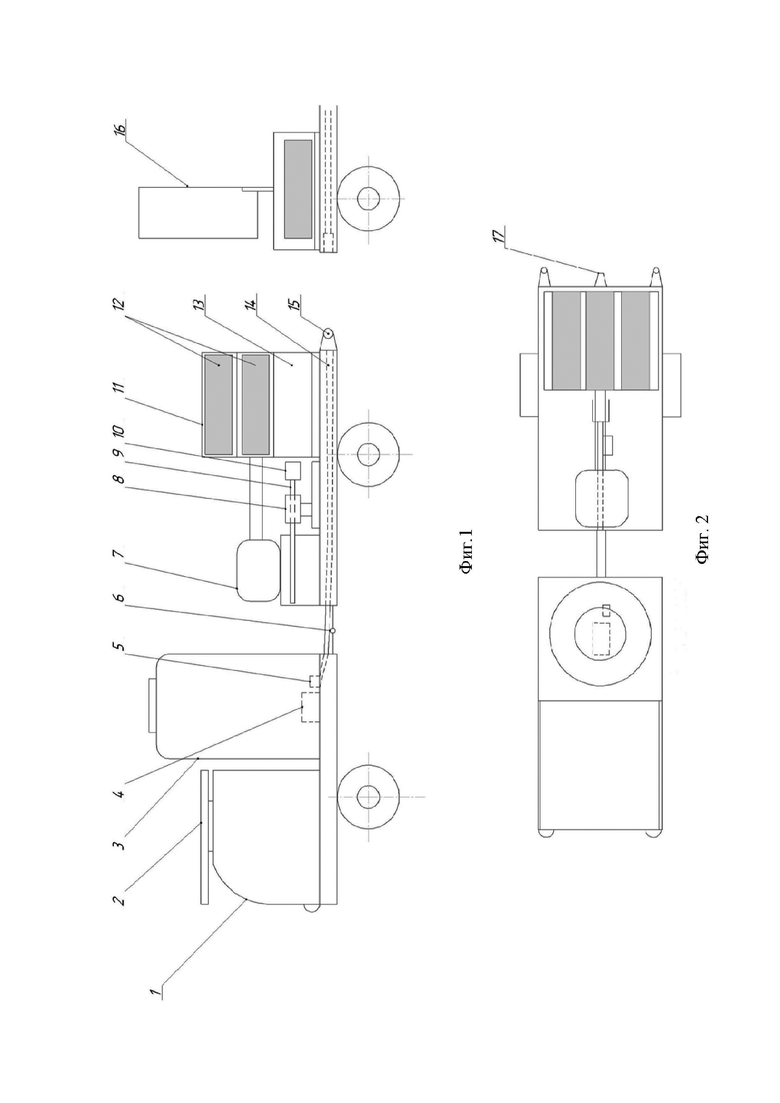
На фиг. 1 показана схема сервисного мобильного робота и комплект монтируемых на обслуживаемых объектах устройств для обмена сменными модулями и жидкими материалами (вид сбоку).
На фиг. 2 показана схема сервисного мобильного робота (вид сверху).
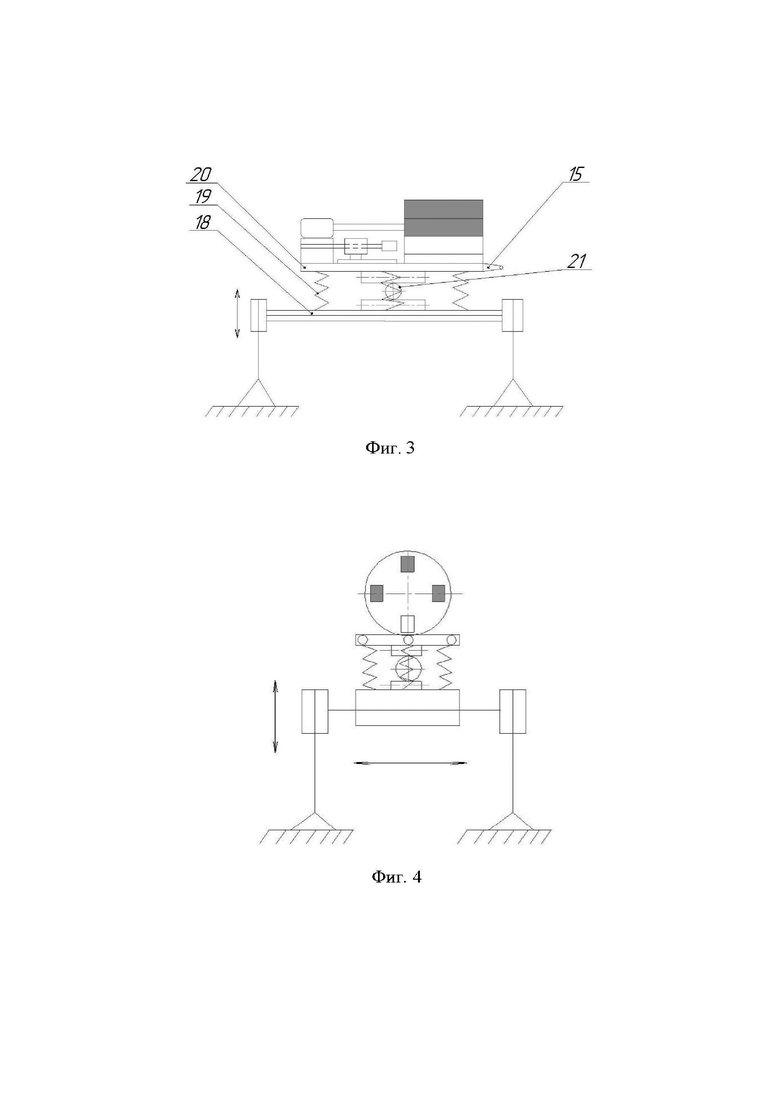
На фиг. 3 показана схема стыковочно-обменной платформы (вид сбоку).
На фиг. 4 показана схема стыковочно-обменной платформы (вид сзади).
Шасси сервисного мобильного робота состоит из двух частей - передней и задней, рамы которых соединены между собой поворотным шарниром 6. На рамах передней и задней частей шасси установлены движители. Помимо обеспечения подвижности мобильному роботу и выполнения функций несущей конструкции для монтируемого оборудования, шасси обеспечивает управляемое движение, при котором взаимное угловое расположение частей, позволяет при сближении с обслуживаемым объектом изменять направление ориентации в горизонтальной плоскости стыковочно-обменной платформы, обеспечивая необходимые условия стыковки.
В вариантах исполнения передней и задней частей шасси движители могут монтироваться к рамам через соответственно переднюю и заднюю подвеску. В другом варианте исполнения шасси, поворотный шарнир 6 может быть оснащен приводом поворота.
В составе системы управления сервисным мобильным роботом, приводы, обеспечивающие функционирование движителей и ориентирование частей шасси в поворотном шарнире 6, рассматриваются в качестве исполнительных устройств.
Энергосиловой блок 1 включает в себя устройства, выполняющие функции генерации, приема, преобразования, хранения и передачи энергии, а также устройства для контроля и управления энергетическими процессами. В сервисном мобильном роботе основной вид энергии – электрический, но может быть также использована механическая, гидравлическая и пневматическая энергия и их комбинации. Например, в различных вариантах исполнения сервисного мобильного робота в качестве источников энергии могут быть использованы: ДВС, ДВС-электрогенератор, панель солнечных батарей 2, троллей, а в качестве накопителей силовой энергии – химические аккумуляторы, суперконденсаторы (ионисторы), емкости с сжатым воздухом или вращающиеся маховики. Для приема, преобразования и передачи энергии применяются соответствующие преобразователи и устройствами коммутации силовой энергии. Для контроля и управления энергетическими процессами используются вычислительные устройства (микроконтроллеры) с соответствующими датчиками, а также коммутационными, регулирующими и преобразующими исполнительными устройствами.
Блок управления шасси включает в себя бортовой вычислитель, включающий не менее одной ЭВМ, устройства коммуникаций и встроенные в блок внутренние датчики, например, модуль связи Интернет, роутер-маршрутизатор бортовой локальной вычислительной сети, инерциальный датчик или датчик глобального позиционирования GPS/ГЛОНАСС.
Через средства коммуникационного интерфейса блок управления шасси используется в качестве главного блока управления подчиненными блоками управления стыковочно-обменной платформы и гидравлической системы сервисного мобильного робота.
В другом варианте исполнения датчики и исполнительные устройства стыковочно-обменной платформы и гидравлической системы подключаются напрямую к блоку управления шасси сервисного мобильного робота.
Возможен вариант исполнения, при котором в качестве главного блока управления используется блок управления стыковочно-обменной платформы, блок управления гидравлической системы или любой иной монтируемый на сервисном мобильном роботе блок управления, а блок управления шасси в данном варианте подчинен данному главному блоку.
Таким образом главный блок управления, монтируемый в любом удобном месте на сервисном мобильном роботе, совокупностью своих устройств выполняет функции приема и преобразования сигналов с датчиков, приема/передачи информации при обмене с внешними и подчиненными устройствами, датчиками и исполнительными устройствами, функции хранения и обработки информации, в т.ч. связанной с автоматическим расчетом параметров и режимов работы сервисного мобильного робота, принятием решений в соответствии с заложенными алгоритмами и программами, а также формированию управляющих сигналов для исполнительных устройств, входящих в состав сервисного мобильного робота, обеспечивающих его целевое поведение в составе технической системы.
Комплект датчиков и исполнительных устройств шасси включает совокупность датчиков и исполнительных устройств, в т.ч. приводы движителей и поворотного шарнира 6, обеспечивающих систему управления необходимой информацией об окружающей и внутренней среде и воздействия на неё для решения задач автоматического управления поведением сервисного мобильного робота.
Средства коммуникаций шасси включают совокупность силовых и сигнальных электрических кабелей, их сборки (жгуты) в любых комбинациях, гибких или жёстких гидро- и пневмотрубопроводов, а также их сборки (жгуты) в любых комбинациях, элементы их соединения и несущие/удерживающие элементы для них (гибкие или жёсткие кабель-каналы с элементами крепежа и иные элементы крепежа кабелей и трубопроводов), предназначенных для передачи энергии и информационно-управляющих сигналов между частями сервисного мобильного робота.
Стыковочно-обменная платформа включает совокупность устройств для обеспечения ориентации элементов интерфейса сервисного робота относительно соответствующих элементов интерфейса обслуживаемого объекта, а также для их стыковки и выполнения процедур обмена съемными модулями и жидкими материалами.
Стыковочно-обменная платформа состоит из несущей рамы платформы, механизма ориентации платформы, с помощью которого рама платформы крепится и удерживается на шасси сервисного мобильного робота, а также закрепленные на раме устройство хранения сменных модулей, манипулятор сменных модулей, устройства интерфейса, а также монтируемые в конструктивно обусловленном или любом удобном месте блок управления, датчики, приводы и средства коммуникаций, аналогичных, перечисленным для шасси сервисного мобильного робота.
Механизм ориентации платформы представляет собой устройство, состоящее из двух частей – нижней 18 и верхней 20, которые обеспечивают ориентацию устройств интерфейса сервисного мобильного робота относительно обслуживаемого объекта. Верхняя часть механизма соединяется с несущей рамой стыковочно-обменной платформы, а нижняя часть базируется на раме одной из частей шасси сервисного мобильного робота.
Нижняя часть механизма ориентации платформы содержит механизмы горизонтального и вертикального перемещения с приводами, обеспечивающими изменение положения верхней части и соответственно рамы стыковочно-обменной платформы по горизонтали и вертикали относительно поперечной плоскости шасси сервисного мобильного робота.
Верхняя часть механизма ориентации платформы содержит шарнир 21 с двумя степенями свободы с удерживающими упругими элементами 19, который позволяет несущей раме стыковочно-обменной платформы иметь подвижность по угловым степеням свободы относительно нижней части механизма и соответственно относительно продольной и поперечной плоскостей шасси сервисного мобильного робота.
В другом варианте исполнения верхняя часть механизма может содержать устройство блокировки шарнира с приводом или без него, которое позволяет отключить угловые степени свободы и придать жесткость для удержания стыковочно-обменной платформы в транспортном режиме работы сервисного мобильного робота.
В ещё одном варианте исполнения упругие элементы, удерживающие раму стыковочно-обменной платформы дополнены амортизаторами для гашения колебаний рамы и поглощения ударных нагрузок.
В другом варианте исполнения верхняя часть механизма может содержать приводы наклона, обеспечивающие контролируемое угловое отклонение рамы стыковочно-обменной платформы в продольной и/или поперечной плоскостях относительно шасси сервисного мобильного робота.
Устройство хранения сменных модулей обеспечивает размещение, удержание и хранение сменного модуля, а также заданное положение относительно манипулятора. Содержит барабан 11 с приводом 7 и съемные модули. Конструкция барабана включает в себя отсеки с направляющими, удерживающие элементы-замки и при необходимости функциональные элементы интерфейса со съемным модулем (например, клеммы для обмена энергией с аккумуляторной батарей).
Направляющие отсеков барабана 11 и обслуживаемого объекта 16 с соответствующими конструктивными элементами съемных модулей образуют механическую кинематическую пару, обеспечивающую беспрепятственное перемещение, а замки - удержание съемного модуля в отсеке барабана или обслуживаемого объекта.
Манипулятор сменных модулей – устройство для манипулирования сменными модулями сервисного мобильного робота, представляющее собой толкатель 9 со схватом 10, которое позволяет манипулировать сменными модулями, хранящимися на сервисном мобильном роботе и обслуживаемом объекте после их успешной стыковки. Толкатель 9 и схват 10 оснащены соответствующими приводами 8.
Устройства интерфейса включают в себя стыковочно-сцепные устройства 15 и заправочные порты 17, монтируемые на сервисном мобильном роботе и на обслуживаемом объекте 16, предназначенные для механического сопряжения и сцепки сервисного мобильного робота и обслуживаемого объекта 16 и обмена сменными модулями и жидкими материалами, которые парно расположены на роботе и обслуживаемом объекте, а элементы пар геометрически и кинематически совместимы друг с другом.
Стыковочно-сцепные устройства 15 обеспечивают механическое сопряжение и жесткую связь между сервисным мобильным роботом и обслуживаемым объектом, гарантирующую геометрическое и кинематическое соответствие манипулятора сменных модулей и заправочных портов 17 для обмена жидкими материалами. Включают в себя не менее двух пар направляющих элементов, выполненных, например, в виде конусов и воронок, а также замков, выполненных, например, в виде механических или электромеханических фиксаторов.
Заправочный порт 17 представляет собой быстроразъемное устройство герметичного гидравлического соединения, предназначенное для обмена жидкими материалами после стыковки с ответной частью такого же устройства. Конструктивно может быть исполнено в виде направляющего элемента – конуса или воронки, оснащенного элементами герметизации соединения, обратным клапаном 5, открывающимся при стыковке, например с помощью управляемого привода замка соединения или от механического давления стыка, а также патрубок к гидросистеме базовой части – сервисного робота или обслуживаемого объекта.
Блок управления стыковочно-обменной платформой, включает в себя выделенный контроллер управления, например, на базе цифрового микроконтроллера, а также силовые преобразователи для управления приводами платформы.
В варианте исполнения без блока управления стыковочно-обменной платформой, сигналы с датчиков платформы поступают непосредственно в главный блок управления сервисного мобильного робота, а силовое управление приводами осуществляется с помощью энергосилового блока.
В качестве датчиков платформы в зависимости от способа управления могут быть использованы различные датчики, позволяющие отследить состояние приводов и механизмов платформы, их ориентацию, кинематические, сило-моментные и электрические характеристики, а также иные характеристики воздействий объектов окружающей и внутренней среды платформы.
Конструктивно сигналы с датчиков, питающие и управляющие сигналы к приводам и иным исполнительным и питаемым устройствам с помощью комплекта силовых и сигнальных кабелей, прокладываются от блока управления платформой и к источникам или приемникам сигналов или электроэнергии удобным и безопасным для функционирования способом, в том числе с использованием например гибких кабель-каналов.
Гидравлическая система сервисного мобильного робота, представляет собой монтируемую на роботе любым удобным способом совокупность устройств для хранения и обмена жидкими материалами, и включает в себя емкость 3, трубопроводы 14, насос 4 и гидравлическую арматуру (запорную, распределительную и иную).
Комплект совместимого с сервисным мобильным роботом оборудования, монтируемый любым удобным способом на обслуживаемом объекте включает в себя стыковочно-сцепные устройства в составе не менее двух направляющих элементов, например в виде конусов или воронок, удерживающих элементов (замков) и элементов для датчиков ориентации сервисного мобильного робота, в т.ч. пассивного исполнения (метки или отражатели), устройство хранения сменного модуля в составе отсека с направляющими, удерживающих элементов (замков) и функциональных элементов интерфейса модуля (например, клеммы для АКБ), съемный модуль в составе несущей конструкции, направляющих и удерживающих элементов (салазки или пазы, адаптеры для схвата и для замков), функциональные элементы модуля (например, АКБ) и функциональные элементы интерфейса модуля (например, клеммы АКБ), заправочный порт в том же составе, что и на сервисном мобильном роботе.
В зависимости от назначения возможны варианты исполнения, в которых на обслуживаемом объекте не монтируется заправочный порт или устройство хранения сменного модуля со сменными модулями. Также возможен вариант исполнения, когда на сервисном мобильном роботе и обслуживаемом объекте для одновременного использования монтируется по несколько устройств хранения сменного модуля со сменными модулями или заправочных портов.
Возможен вариант конструктивного исполнения заправочного порта, позволяющего использовать его также в качестве стыковочно-сцепного устройства.
Размещение, ориентация и монтаж на обслуживаемом объекте перечисленного комплекта совместимого с сервисным мобильным роботом оборудования осуществляется в геометрическом и кинематическом соответствии с ответными устройствами и механизмами сервисного мобильного робота.
Выполнение задачи сервисным мобильным роботом осуществляется следующим образом.
При необходимости обмена сменными модулями или жидкими материалами с обслуживаемым объектом 15, сервисному мобильному роботу от диспетчера или внешней системы управления по каналам связи поступает сообщение о необходимости обслуживания и вся необходимая для этого информация (координаты местоположения, ориентация, последовательность и режимы операций и т.д.), после чего он в автоматическом режиме выезжает к месту расположения обслуживаемого объекта 15. Затем с учетом ориентации и особенностей местности подъезжает на расстояние, гарантирующее ему минимальные условия для обеспечения автоматической сцепки с обслуживаемым объектом и путем изменения положения стыковочно-обменной платформы по горизонтали и вертикали обеспечивает необходимое взаимное расположение сервисного мобильного робота и обслуживаемого объекта 15 так, чтобы стыковочно-сцепные устройства 14 стыковочно-обменной платформы были расположены в локальной зоне, гарантирующей условия удачной стыковки, контролируемых с помощью датчиков приближения и ориентации относительно обслуживаемого объекта, оснащенного пассивными элементами обратной связи. Затем сервисный мобильный робот в режиме автоматической стыковки вплотную подъезжает к обслуживаемому объекту 15, за счет управления обеспечивает касание и смыкание стыковочно-сцепных устройств 14 сервисного робота и обслуживаемого объекта. Далее срабатывают замки стыковочно-сцепных устройств 14 и заправочного порта 16, обеспечивая механическое и гидравлическое соединение сервисного робота с обслуживаемым объектом, достаточное для выполнения задач обслуживания.
Для обмена жидкими материалами с обслуживаемым объектом включается насос 4, режим работы которого и момент выключения которого контролируется с помощью датчиков и/или прямой или опосредованной (через вычислительную сеть) связи с обслуживаемым объектом.
Для обмена сменными модулями 12 барабан 11 устанавливается своим пустым отсеком 13 напротив извлекаемого из обслуживаемого объекта сменного модуля или передаваемым сменным модулем напротив пустого отсека обслуживаемого объекта.
В первом случае толкатель 9 перемещается в сторону обслуживаемого объекта 15, проходя через полость пустого отсека 13 барабана 11 до контакта со сменным модулем, хранящимся на обслуживаемом объекте 16, далее схват 10 толкателя 9 смыкается, и удерживая сменный модуль за адаптер для схвата, возвращается в свое исходное положение, при этом когда сменный модуль проходит через полость пустого отсека 13, для хранения сменного модуля, барабана 11 схват 10 размыкается, оставляя сменный модуль в ранее пустом отсеке 13, затем барабан 11 вращается на заданный угол, устанавливая в положение для толкателя 9 отсек с требуемым сменным модулем, после чего толкатель 9 вновь перемещается в сторону обслуживаемого объекта 16 и при контакте со сменным модулем, схват 10 вновь смыкается, продолжая движение через полость в барабане 11, сменный модуль устанавливается по направляющим в полость отсека для его хранения на обслуживаемом объекта 16, удерживаемом замками, далее схват 10 размыкается, оставляя сменный модуль на обслуживаемом объекте 16, и возвращается в исходное положение.
Во втором случае толкатель устанавливает сменный модуль в обслуживаемый объект по части описанного алгоритма со слов «толкатель 8 вновь перемещается в сторону обслуживаемого объекта 16».
После обмена сменными модулями или жидкими материалами обслуживаемого объекта 16 происходит автоматическое размыкание механизмов замков, удерживающих стыковочно-сцепные устройства 15 и заправочный порт 17 сервисного мобильного робота, после чего он отъезжает от обслуживаемого объекта 16, сообщает диспетчеру или внешней системе управления о выполненном обслуживании текущего объекта и в зависимости от состояния выполняемого задания переходит к обслуживанию следующего объекта, возвращается к исходной позиции или стоит в ожидании новых команд.
При использовании сервисного мобильного робота как средства для транспортировки сменных модулей, используемых в качестве накопителей энергии и при схеме энергообеспечения, предусматривающей возможность их зарядки на специализированной зарядной станции, после извлечения из обслуживаемых объектов разряженных накопителей сервисный мобильный робот отправляется в расположение и стыкуется со специализированной зарядной станцией и таким же образом обменивается сменными модулями с ней. Затем после их зарядки вновь обменявшись уже заряженными накопителями сервисный мобильный робот может приступить к обслуживанию других объектов, нуждающихся в энергии.
Технический результат - сервисный мобильный робот, оснащенный самоходным шасси со всеми необходимыми средствами для автоматического управления, включая блок управления с коммуникационными интерфейсами, энергосиловой блок, комплект датчиков, контроллеров и исполнительных устройств и иных средств коммуникации и преобразования энергии и сигналов, а также монтируемые на обслуживаемых объектах комплекты совместимых с сервисным мобильным роботом устройств для обмена сменными модулями и жидкими материалами, отличающиеся тем, что в состав конструкции сервисного мобильного робота кроме шасси дополнительно входит стыковочно-обменная платформа и комплект устройств гидравлической системы, а в состав комплекта оборудования обслуживаемого объекта входят стыковочно-сцепные устройства, устройство хранения сменного модуля, сменный модуль и заправочный порт.
| название | год | авторы | номер документа |
|---|---|---|---|
| Беспилотный тягово-энергетический модуль сельскохозяйственного назначения и способ его агрегатирования с сельскохозяйственными машинами | 2022 |
|
RU2805880C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| Робототехнический комплекс для безлюдного возведения строений/укрытий на Луне | 2020 |
|
RU2751836C1 |
| АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС УСТРОЙСТВ ДЛЯ УХОДА ЗА ПЛАНТАЦИЕЙ РАСТЕНИЙ И СПОСОБ УХОДА ЗА ПЛАНТАЦИЕЙ РАСТЕНИЙ | 2011 |
|
RU2477037C2 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| Робототехнический комплекс для обеспечения общественной безопасности | 2020 |
|
RU2757747C1 |
| Роботизированное устройство для обслуживания клиентов | 2016 |
|
RU2629172C1 |
| 2_Многофункциональный наземный робототехнический комплекс | 2023 |
|
RU2829371C1 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
Изобретение относится к сервисной робототехнике, в частности может быть использовано для замены аккумуляторных батарей и заправки опрыскиваемой жидкостью сельскохозяйственных роботов-опрыскивателей с обеспечением автоматизации процесса обслуживания. Сервисный мобильный робот содержит самоходное шасси со средствами для автоматического управления, стыковочно-обменную платформу, предназначенную для ориентации и стыковки шасси сервисного мобильного робота с обслуживаемым объектом и выполненную с механизмом ориентации платформы, с помощью которого рама стыковочно-обменной платформы крепится и удерживается на шасси сервисного мобильного робота и ориентируется относительно обслуживаемого объекта. Сервисный мобильный робот также содержит сменные модули, используемые при обмене с обслуживаемым объектом, а также закрепленные на раме стыковочно-обменной платформы манипулятор сменных модулей в виде толкателя со схватом и устройство хранения сменных модулей. 4 ил.
Сервисный мобильный робот, содержащий самоходное шасси со средствами для автоматического управления, включая блок управления с коммуникационными интерфейсами, энергосиловой блок, комплект датчиков, контроллеров и исполнительных устройств и иных средств коммуникации и преобразования энергии и сигналов, комплект устройств гидравлической системы и комплект совместимых с сервисным мобильным роботом устройств, выполненных с возможностью монтажа на обслуживаемых объектах, содержащий устройства для обмена сменными модулями и жидкими материалами, отличающийся тем, что он снабжен стыковочно-обменной платформой, предназначенной для ориентации и стыковки шасси сервисного мобильного робота с обслуживаемым объектом, состоящей из несущей рамы, монтируемых в конструктивно обусловленном месте блока управления, датчиков, приводов и средств коммуникаций, аналогичных перечисленным для шасси сервисного мобильного робота, а также включает механизм ориентации платформы, с помощью которого рама стыковочно-обменной платформы крепится и удерживается на шасси сервисного мобильного робота и ориентируется относительно обслуживаемого объекта, состоящий из верхней и нижней частей звеньев конструкции с шарнирными соединениями, причем нижняя часть, базирующаяся на раме шасси сервисного мобильного робота, содержит механизмы горизонтального и вертикального перемещения с приводами, обеспечивающими изменение положения верхней части и соответственно рамы стыковочно-обменной платформы по горизонтали и вертикали относительно поперечной плоскости шасси сервисного мобильного робота и тем самым ориентацию устройств интерфейса сервисного мобильного робота относительно обслуживаемого объекта, а верхняя часть механизма ориентации платформы, соединяемая с несущей рамой стыковочно-обменной платформы и позволяющая ей иметь подвижность по угловым степеням свободы относительно нижней части механизма и соответственно относительно продольной и поперечной плоскостей шасси сервисного мобильного робота, содержит шарнир с двумя степенями свободы с удерживающими упругими элементами, также закрепленный на раме стыковочно-обменной платформы манипулятор сменных модулей, выполненный в виде толкателя со схватом, причем сменные модули, используемые сервисным мобильным роботом при обмене с обслуживаемым объектом, представляют собой конструкцию с несущими элементами и функциональными элементами для выполнения функций, не связанных с обменом сменными модулями, в том числе функций интерфейса с контактирующими с ним устройствами, для чего содержат направляющие и удерживающие конструктивные элементы в виде салазок или пазов и конструктивные элементы, предназначенные для удержания сменного модуля схватом и элементами замков, а элементы интерфейса с контактирующими устройствами размещены и сориентированы таким образом, чтобы обеспечивать их функционирование при контакте с ними, также закрепленное на раме стыковочно-обменной платформы устройство хранения сменных модулей, предназначенное для обеспечения размещения, хранения и удержания заданного положения сменных модулей относительно манипулятора стыковочно-обменной платформы, содержащее барабан с приводом, конструкция которого включает функциональные элементы интерфейса со сменным модулем и отсеки, используемые для хранения сменных модулей, полая несущая конструкция которых выполнена с входными и при необходимости выходными окнами и оснащена направляющими конструктивными элементами и удерживающими механическими или электромеханическими элементами-замками, при этом направляющие выполнены так, что образуют с соответствующими конструктивными элементами сменных модулей механическую кинематическую пару, обеспечивающую беспрепятственное перемещение, а замки - удержание сменного модуля в отсеке, также закрепленные на раме стыковочно-обменной платформы стыковочно-сцепные устройства интерфейса, предназначенные для обеспечения механического сопряжения и сцепки сервисного мобильного робота и обслуживаемого объекта и обмена сменными модулями, состоящие из стыковочно-сцепных устройств, причем сервисный мобильный робот выполнен с возможностью монтажа на стыковочно-обменной платформе и на обслуживаемом объекте совокупно не менее четырех парно расположенных стыковочно-сцепных устройств, а элементы пар геометрически и кинематически совместимы друг с другом таким образом, что обеспечивают механическое сопряжение и жесткую связь между сервисным мобильным роботом и обслуживаемым объектом, гарантирующую геометрическое и кинематическое соответствие манипулятора сменных модулей с ответными частями обслуживаемого объекта благодаря направляющим элементам, выполненным в виде конусов или воронок, а жесткость соединения обеспечивается благодаря замкам, выполненным в виде механических или электромеханических фиксаторов, также закрепленные на раме стыковочно-обменной платформы заправочные устройства интерфейса, предназначенные для обеспечения обмена жидкими материалами между сервисным мобильным роботом и обслуживаемым объектом, представляющие собой заправочные устройства, причем сервисный мобильный робот выполнен с возможностью монтажа на стыковочно-обменной платформе и на обслуживаемом объекте одного или более заправочных портов, выполненных в виде быстроразъемных устройств герметичного гидравлического соединения с направляющими элементами в виде конуса или воронки, оснащенных элементами герметизации соединения, обратными клапанами, открывающимися при стыковке, а также патрубки к гидросистеме базовой части сервисного робота или обслуживаемого объекта, позволяющие выполнить обмен жидкими материалами, при этом комплект совместимых с сервисным мобильным роботом устройств дополнительно содержит стыковочно-сцепные и заправочные устройства интерфейса и устройства для хранения сменных модулей.
| СПОСОБ ОБРАБОТКИ ОБЪЕМНЫХ ОБЪЕКТОВ | 2015 |
|
RU2597864C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ДЛЯ АВТОМАТИЗИРОВАННОЙ АВИАЦИОННОЙ ХИМИЧЕСКОЙ ОБРАБОТКИ РАСТЕНИЙ И СПОСОБ ЕГО ПРИМЕНЕНИЯ | 2015 |
|
RU2586142C1 |
| РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КУРЬЕРСКИЙ КОМПЛЕКС | 2022 |
|
RU2787547C1 |
| НАЗЕМНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2017 |
|
RU2678553C1 |
| РОБОТИЗИРОВАННАЯ ТРАНСПОРТНАЯ ПЛАТФОРМА | 2018 |
|
RU2701592C1 |
| US 8058990 B2, 15.11.2011 | |||
| JP 2000198495 A, 18.07.2000. | |||

