Изобретение относится к машиностроению и предназначено, главным образом, для использования при создании манипуляторов с высокими силомоментными характеристиками.
Известны тросовые приводы манипуляторов, представляющие собой тросовые системы одностороннего действия для силомоментного управления подвижным элементом шарнирного узла/шарнирных узлов манипулятора, и включающие подвижный трос, лебёдочное устройство и подвижные и неподвижные блоки с направляющими, натяжными и приведёнными шкивами. Шарнирные узлы манипулятора представляют собой вращательные кинематические пары с неподвижной или подвижной осями вращения подвижного элемента пары.
Системы подвижных и неподвижных блоков тросовой системы могут образовывать полиспастные механизмы, предназначенные для увеличения усилия, приложенного к подвижному элементу шарнирного узла от приводного троса.
Известно, что эффективность манипуляционных роботов с тросовыми приводами демонстрирует робот AMBIDEX - это робот-манипулятор построенный на механизмах с тросовым приводом.
Источник: [https://www.youtube.com/watch?v=JyMPmeFMhcw].
Благодаря тросовым приводам становится возможным освободить манипуляторы от тяжелых моторредукторов, в результате чего сами манипуляторы становятся многократно легче и подвижней, что играет важную роль в обеспечении коллаборативности манипуляционных роботов. Точность и повторяемость движений подобных манипуляторов обеспечивается применением антагонистичных тросовых систем со связанными обратными связями системами управления по нагрузкам. В результате, манипуляционные роботы по управляемости и производительности приближаются к промышленным роботам-манипуляторам.
Важнейшей характеристикой манипулятора, определяющей его эффективность, является величина момента сил, создаваемого приводом манипулятора на подвижном элементе шарнирного узла/шарнирных узлов. В манипуляторе с тросовым приводом момент сил на подвижном элементе создаётся приводным тросом. При этом возникающий момент сил на подвижном элементе шарнирного узла прямо пропорционален величине приложенного от троса к подвижному элементу усилия и синусу угла между направлением тяги троса и направлением геометрической оси подвижного элемента, проходящей через ось вращения подвижного элемента.
Соответственно, при расправлении манипулятора традиционной конструкции угол между направлением тяги троса и осью подвижного элемента стремиться к нулю вместе с величиной момента сил на подвижном элементе, вследствие чего эффективность манипулятора снижается.
Заявленное изобретение направлено на достижение технического результата в виде повышения эффективности манипуляторов с тросовым приводом.
Указанный технический результат достигается тем, что конструкция шарнирного узла, связывающего неподвижный и подвижный элементы вращательной пары в шарнире дополняется рычагом со свободно вращающемся шкивом, а приводной трос запасовывается в опорный шкив блока, закреплённого на неподвижном элементе шарнирного узла, в шкив на рычаге и закрепляется на подвижном элементе шарнирного узла или запасовывается в шкив блока, закреплённого на подвижном элементе для создания полиспастной системы.
Дополнительный рычаг в шарнирном узле может быть закреплён подвижно на оси шарнирного узла, или на неподвижном элементе шарнирного узла.
Комбинирую схемы запасовки троса в шкивы на неподвижном элементе шарнирной пары, в шкивы на подвижно закреплённом или неподвижно закреплённом рычаге шарнира и в шкивы на подвижном элементе шарнирной пары можно создавать различные полиспастные системы для манипуляторов различного назначения.
В том числе, может быть создана полиспастная система между неподвижно закреплённом на неподвижном элементе шарнирной пары рычагом и подвижным элементом, которая обеспечит кратное увеличение приложенного к подвижному элементу усилия от троса при больших значениях угла между направлением тяги полиспастной системы и осью подвижного элемента. Соответственно, будет достигнут технический результат в виде развития большого момента сил на подвижном элементе при сравнительно небольших моментах на валу привода лебёдочного устройства тросового привода.
Дополнительный рычаг со шкивами также может быть закреплён на оси шарнирного узла с неподвижной осью вращения подвижного элемента. На основе такой схемы, может быть создана сложная полиспастная система с блоками на неподвижном элементе шарнирного узла, промежуточными блоками на подвижно закреплённом на неподвижной оси шарнирного узла рычаге и с блоками на подвижном элементе шарнирного узла, имеющего возможность поворота вокруг неподвижной оси шарнирного узла. Такая полиспастная система позволит оптимальным для выполняемых манипулятором действий распределять усилия на элементах конструкции манипулятора и придавать им необходимые динамические характеристики.
В наибольшей степени преимущества рычажно-полиспастной системы тросового привода шарнирных узлов манипуляторов проявляются в шарнирных узлах с подвижной осью вращения подвижного элемента. В таких конструкциях дополнительный рычаг шарнирного узла закрепляет на межосевой тяге, соединяющей оси неподвижного и подвижного элементов шарнирного узла. Пример исполнения подобного узла приведён на фиг. 1, на котором схематически изображена рычажно-полиспастная система тросового привода шарнирного узла антропометрического манипулятора.
На фиг. 1 представлены:
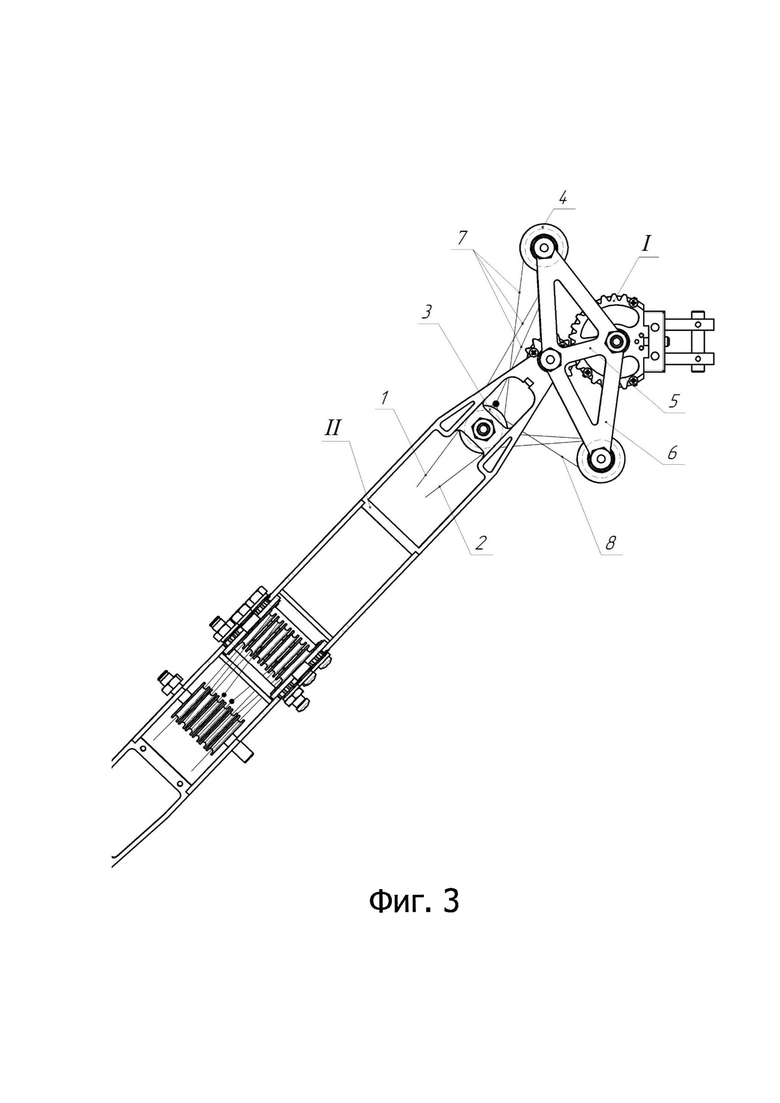
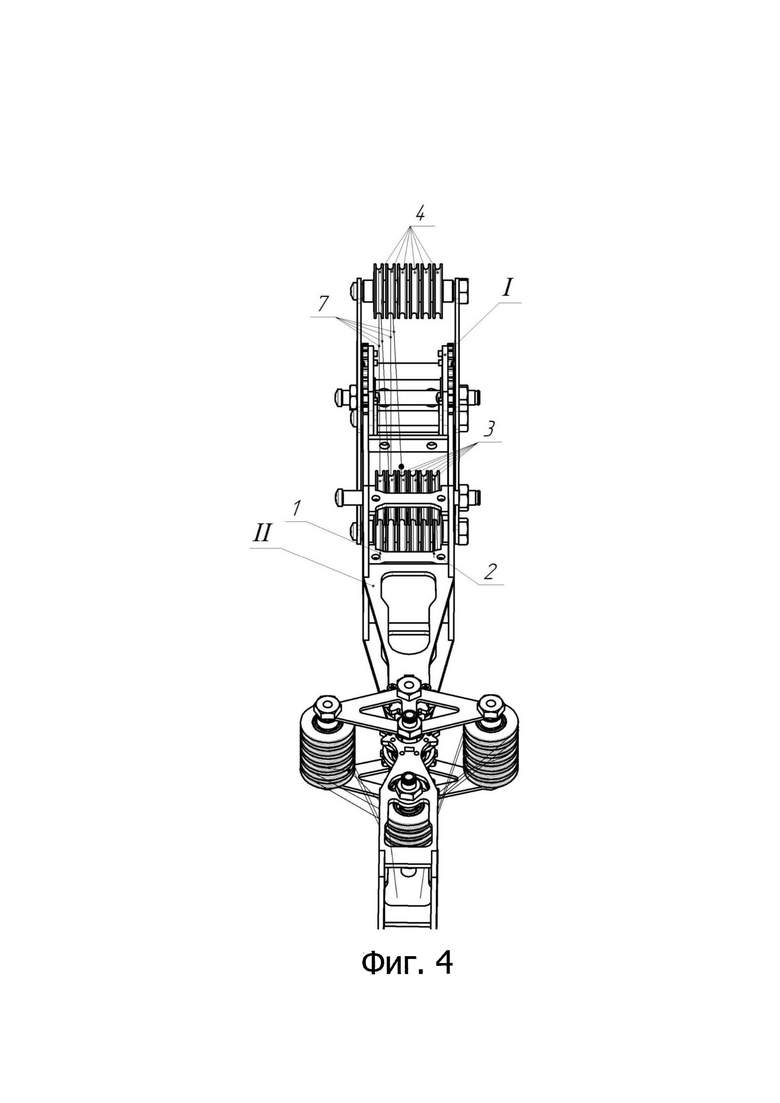
I – неподвижный элемент шарнирного узла; II – подвижный элемент шарнирного узла; 1 – трос привода механизма сгибания шарнира; 2 – трос привода механизма разгибания шарнира (антагонист); 3 – шкивы блоков на подвижном элементе шарнирного узла; 4 – шкивы блоков на рычажном элементе шарнирного узла; 5 – межосевая тяга; 6 – рычаг рычажно-полиспастной системы; 7 – витки троса полиспастной системы рычаг-подвижный элемент сгибателя; 8 – рычажно-полиспастная система привода механизма разгибателя.
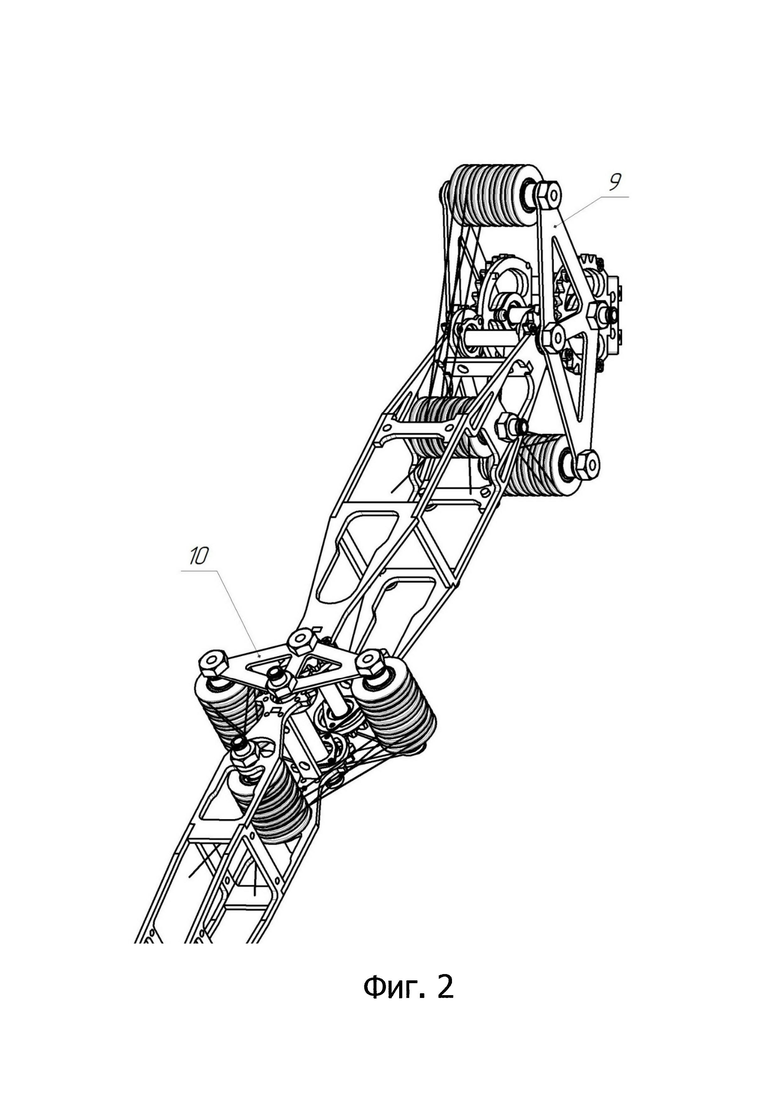
Конструкция манипулятора с рычажно-полиспастными механизмами приводов шарнирных узлов представлена на фиг. 2:
9 – рычажно-полиспастная система привода плечевого шарнирного узла манипулятора. 10 – рычажно-полиспастная система привода локтевого шарнирного узла.
На фиг. 3 и фиг. 4 представлены вид конструкции манипулятора вид сбоку и вид спереди.
В результате выполнения шарнирного узла по новой схеме с рычажно-полиспастным тросовым приводом достигнут технический результат в виде создания антропометрического манипулятора андроидного робота с кинематическими и силомоментными характеристиками, превосходящими кинематические и силомоментные характеристики руки человека при сопоставимых масса-габаритах.
| название | год | авторы | номер документа |
|---|---|---|---|
| Полиспастный привод подвижных элементов шарниров и схвата манипулятора робота | 2019 |
|
RU2737323C1 |
| Высокоподвижный исследовательский планетоход | 2022 |
|
RU2780069C1 |
| Робототехнический комплекс для обеспечения общественной безопасности | 2020 |
|
RU2757747C1 |
| Робототехнический комплекс для безлюдного возведения строений/укрытий на Луне | 2020 |
|
RU2751836C1 |
| Высокомобильный транспортный робот для перемещения палетированных грузов | 2022 |
|
RU2798652C1 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| Робот-доставщик на одноосном шасси | 2021 |
|
RU2810208C2 |
| ЭКСПЕРТНАЯ СИСТЕМА НА БАЗЕ МЕДИЦИНСКОГО МАНИПУЛЯЦИОННОГО РОБОТА ДЛЯ ТРАНСПЕДИКУЛЯРНОЙ ФИКСАЦИИ ПОЗВОНОЧНИКА | 2023 |
|
RU2833780C1 |
| Способ управления исполнительным механизмом робота-манипулятора с силомоментной обратной связью и устройство для его осуществления | 2018 |
|
RU2699703C1 |
| Мобильный робот-помощник | 2021 |
|
RU2810399C2 |

Изобретение относится к машиностроению, а именно к созданию лёгких высокоподвижных манипуляторов с высокими силомоментными характеристиками. Сущность изобретения заключается в использовании в тросовых приводах шарнирных узлов многозвенных манипуляторов эффектов применения рычагов, создающих оптимальные углы приложения тяговых усилий тросов к элементам шарнирного узла, и эффектов применения полиспастов для увеличения тягового усилия троса без увеличения момента на валу лебёдочного устройства тросового привода. Эти два эффекта позволят исключить явление уменьшения величины момента сил, создаваемого тросовым приводом на подвижном элементе шарнирного узла. Тем самым, достигается увеличение эффективности манипулятора за счёт сохранения высоких силомоментных характеристик при всех конфигурациях многозвенного манипулятора. Для достижения технического результата, в конструкцию шарнирного узла включают дополнительно рычаг с установленным/установленными на нём шкивом или шкивами, в которые запасовывают приводящий трос и в результате чего увеличивается угол между направлением тяги троса и геометрической осью приведённого элемента шарнирного узла. Также, приводящий трос запасовывают в дополнительно установленные в неподвижном и подвижном элементах шарнирного узла шкивы и создают полиспасты, кратно увеличивающие приложенные к подвижному элементу шарнирного узла тяговые усилия троса. В результате выполнения шарнирного узла по новой схеме с рычажно-полиспастовым тросовым приводом достигают технический результат в виде возможности создания антропометрического манипулятора андроидного робота с кинематическими и силомоментными характеристиками, превосходящими кинематические и силомоментные характеристики руки человека при сопоставимых масса-габаритах. 2 з.п. ф-лы, 4 ил.
1. Рычажно-полиспастный привод шарнирных узлов манипуляторов, включающий подвижный трос, лебёдочное устройство и подвижные и неподвижные блоки с направляющими, натяжными и приведёнными шкивами, отличающийся наличием дополнительного шкива или шкивов, установленных в конструкции шарнирного узла манипулятора на дополнительном рычаге, закреплённом на оси шарнирного узла с неподвижной осью вращения подвижного элемента, или на неподвижном элементе шарнирного узла, или на межосевой тяге, соединяющей неподвижную и подвижную оси шарнирного узла.
2. Рычажно-полиспастный привод шарнирных узлов манипуляторов по п.1, отличающийся тем, что тросовая система привода шарнира образует полиспастную систему между неподвижно закреплённом на неподвижном элементе шарнирной пары рычагом и подвижным элементом шарнирного узла с неподвижной осью вращения.
3. Рычажно-полиспастный привод шарнирных узлов манипуляторов по п.1, отличающийся тем, что тросовая система привода шарнирного узла образует два последовательных полиспаста между блоком шкивов на неподвижном элементе шарнирного узла и блоком шкивов на рычаге, и блоком шкивов на рычаге и блоком шкивов на подвижном элементе шарнирного узла с подвижной осью вращения.
| KR 20190129343 A, 20.11.2019 | |||
| US 9713874 B2, 07.05.2015 | |||
| KR 101324502 B1, 01.11.2013 | |||
| Стабилизатор для авиабомб | 1944 |
|
SU66275A1 |
| US 9486919 B1, 08.11.2016 | |||
| US 8419096 B2, 07.07.2011 | |||
| Механическая рука | 1980 |
|
SU998111A1 |

