Известны концепции и проекты технических решений задачи создания на Луне строений/укрытий для размещения личного состава космических экспедиций, систем жизнеобеспечения и научно-исследовательского и/или производственного оборудования.
В соответствии со специфическими физическими условиями на Луне, концепции проектов создания лунных баз со строениями/укрытиями для личного состава и экспедиционного оборудования основываются на отличных от традиционных земных технических решениях алгоритмических, кинематических и динамических задач сбора, транспортировки и преобразования лунного грунта в строительный материал и его укладки в тело ограждающих конструкций строений/укрытий.
Известные технические предложения по решению задач отделения грунтовых масс от лунной поверхности и их транспортировки предусматривают модификацию применяемых на Земле технических решений по воздействию на грунтовые массы.
В отличие от них, решение задачи преобразования лунного грунта в строительный материал требует применения технологий, принципиально отличных от земных. Наиболее популярным подходом к решению этой задачи является превращение лунного грунта в пластичный укладочный материал посредством его нагревания до расплавления посредством экспонирования потоком концентрированного солнечного света, или пропусканием потока грунта через активную зону ядерной энергетической установки, или пропусканием потока грунта через электрическую нагревательную установку, получающую энергию от ядерной энергетической установки или солнечной электростанции.
В качестве сырья для изготовления укладочного материала на Луне рассматривают дробленную горную породу или реголит. Для дробления горных пород требуется применение специального массивного и энергоёмкого оборудования. Из общих оценок представляется очевидным преимущество использования реголита, представляющего собой разнозернистый обломочно-пылевой материал с плотностью 1400–1800 кг/м3, покрывающий поверхность планеты слоем толщиной от нескольких сантиметров до нескольких десятков метров.
Вследствие того, что Лунный реголит характеризуется высокой насыпной плотностью и высокой когезивностью уже на глубине нескольких сантиметров, для его перемещения в больших объёмах при выполнении строительных работ требуются агрегаты, прикладывающие к грунту значительные механические усилия. В условиях низкой гравитации для сохранения устойчивости и остойчивости агрегатов в процессе отделения грунта от лунной поверхности необходимо обеспечивать компенсацию передаваемых на корпус агрегата реактивных сил и моментов сил.
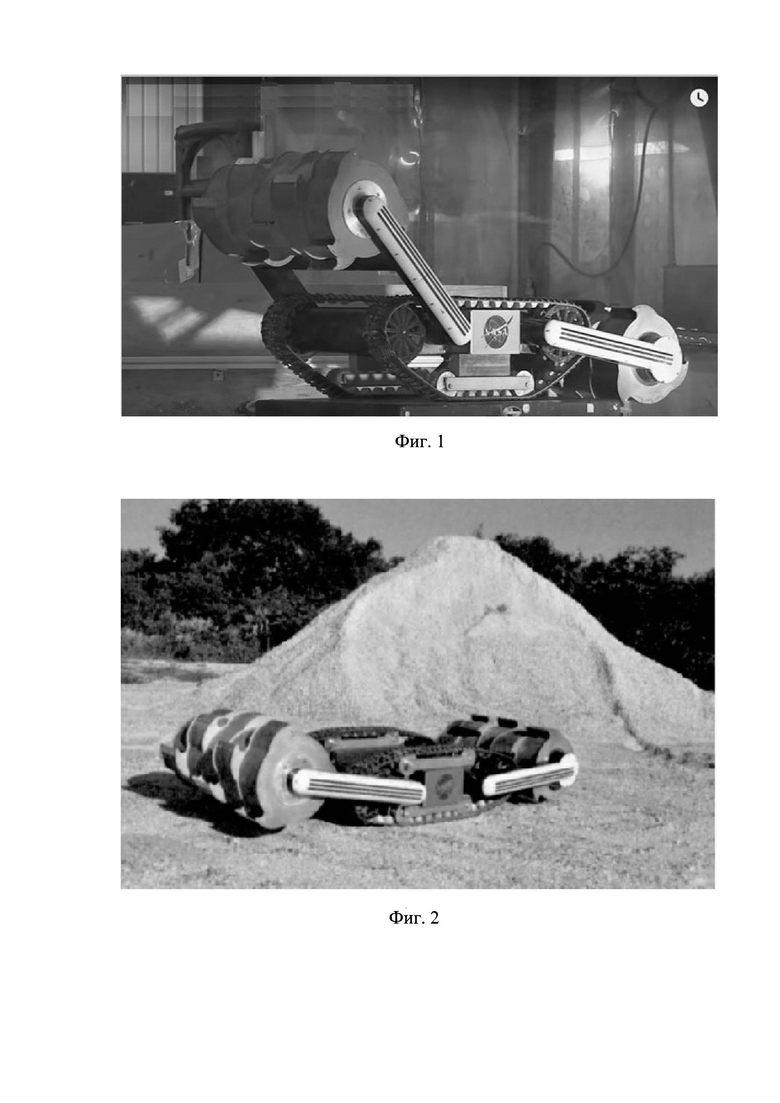
Известно, что Национальное управление по аэронавтике и исследованию космического пространства (НАСА) предлагает применить для сбора и транспортировки реголита экскаватор Regolith Advanced Surface Systems Operations Robot (RASSOR) [https://technology.nasa.gov/patent/KSC-TOPS-7]. Экскаватор представляет собой мобильную телеуправляемую платформу на колёсном или гусеничном шасси, у которой симметрично спереди и сзади на отклоняющихся в вертикальной плоскости рычагах подвешены приведённые от размещённого на платформе двигателя вращающиеся цилиндрические роторы с выступающими над цилиндрической поверхностью ковшами-окнами. Направления входа в ковши-окна на разных роторах зеркально симметричны. При вращении роторов в направлении против входа в окна выступающие ковши загребают реголит в полость ротора. После забора реголита в роторы, поворотные рычаги отклоняются вверх, поднимают роторы над грунтом, и платформа с набранным в роторы реголитом перемещается к месту выгрузки реголита. При смене направления вращения ротора грунт из полости ротора высыпается через ковши-окна. И при наборе грунта и при его выгрузке вращение роторов взаимно противонаправлено. Предполагается, что при такой компоновке экскаватора роторы будут набирать внутрь лунный реголит с компенсацией передаваемых на платформу тяговых усилий и вращательных моментов. Соответственно, будет обеспечена устойчивость и остойчивость платформы в ходе выполнения производственных операций. Также, авторы проекта предписывают соответствие RASSORа требованиям компактности, лёгкости, прочности и эффективности, предъявляемым к оборудованию для космических экспедиций.
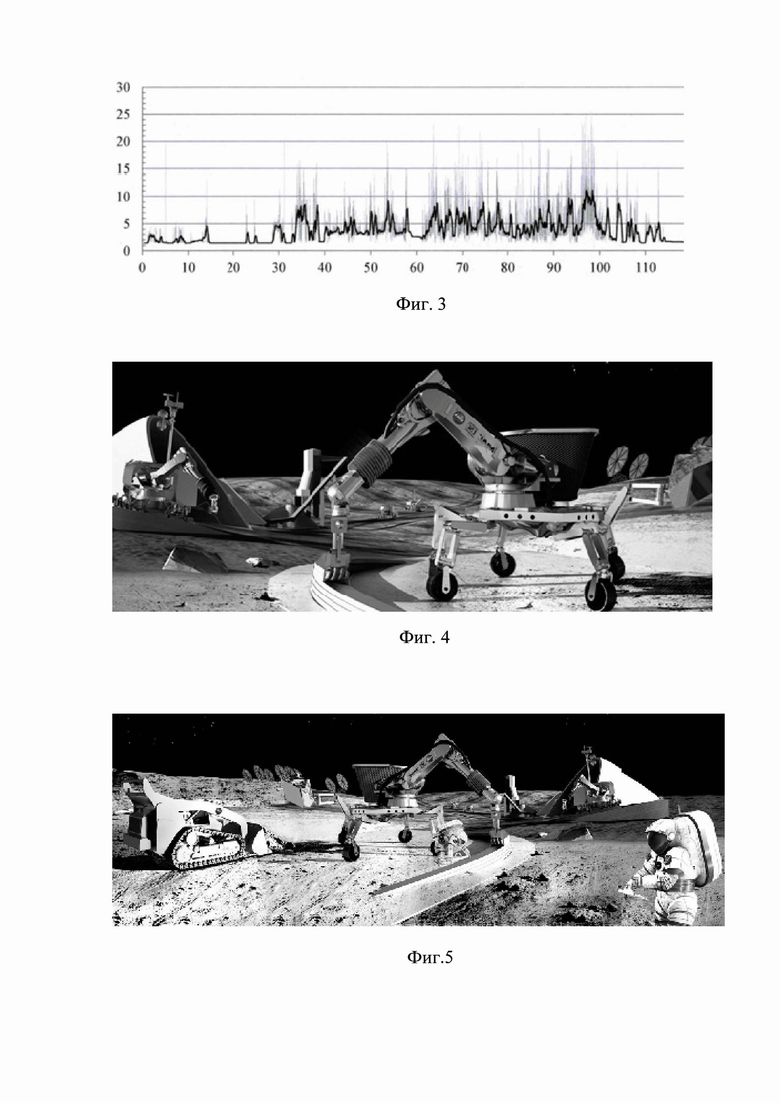
Внешний вид масштабной модели экскаватора RASSOR представлен на Фиг. 1. Вид полноразмерного опытного образца экскаватора представлен на Фиг. 2. На Фиг. 3 представлен график изменения передаваемых от роторов на платформу реактивных сил и моментов сил, возникающих во время работы роторов на относительно однородном грунте. График демонстрирует неизбежность возникновения на платформе экскаватора значительных результирующих усилий и моментов сил. Залежи реголита характеризуются меняющимися по глубине залегания минерализацией и гранулометрией и связанными с ними различиями по величине сопротивления сдвигу, а также содержат большое количество камней и валунов.
Недостатки экскаватора: при прохождении ковшей роторов через реголит неизбежно будут возникать резкие изменения сопротивления вращению роторов. Эти изменения будут создавать соответственные изменения тяговых усилий и изменения результирующего вращательного момента на платформе. Соответственно, платформа будет совершать амплитудные раскачивания и рывки, приводящие к погружению движителей платформы в реголит. Подъём роторов после загрузки грунта приведёт к повышению центра масс экскаватора и соответствующему снижению остойчивости. При движении экскаватора по созданным им самим неровностям и по естественному рельефу местности управление его манёврами значительно усложнится.
Другие известные робототехнические комплексы для сбора лунного грунта и его транспортировки в процессе создания строений/укрытий на Луне предусматривают разработки конструкций на основе структурных схем традиционной земной строительной техники с характерными для неё массогабаритными, кинематическими и динамическими характеристиками. Такая техника выполняет операции с грунтом соответственно сложившимся в земной строительной практике алгоритмам выполнения различных операций с грунтами различными агрегатами, что наглядно демонстрирует представленный на Фиг. 5 вид строительного участка по проекту компании Caterpillar и NASA с набором строительной техники земного образца[https://www.techcult.ru/technics/7489-caterpillar-razrabatyvaet-mashiny-dlya-lunnyh-kolonij].
Это обстоятельство приводит к необходимости доставки на Луну номенклатуры видов массивной и габаритной строительной техники. Технические описания объектов строительной техники для космических экспедиций на Луну отсутствуют. Представления авторов проектов и разработчиков о возможных вариантах исполнения этой техники отображены в иллюстрациях к презентациям проектов. На Фиг. 4 представлен типичный образец таких иллюстраций с изображением возможного вида укладчика ограждающих конструкций из симинала, образующегося в термической камере из реголита. Компоновка укладчика соответствует традиционной компоновке земной строительной техники. Термическая камера расположена на шарнирной стреле укладчика. Реголит поступает в термическую камеру из расположенного на корпусе укладчика бункера. Источник энергии для работы термической камеры не представлен. Способ наполнения бункера реголитом и устройство для его осуществления не изображены. В целом, проиллюстрирована только абстрактная идея возведения лунных строений послойным наращиванием ограждающих конструкций расплавленным реголитом.
Недостатки: такой подход к конструированию техники для космических экспедиций не соответствует принципам и практике осуществления космических экспедиций. Во-первых, по массогабаритным параметрам традиционная строительная техника не согласуется с жёсткими ограничениям массы и габаритов полезной нагрузки космических транспортных систем. Во-вторых, во время работы в условиях низкой гравитации возникающие на корпусах подобной техники некомпенсированные реактивные силы и моменты сил будут выводить технику из равновесия. В-третьих, в условиях вакуума высококогезивный и высокоабразивный реголит будет интенсивно разрушать трущиеся поверхности механизмов традиционной строительной техники. В-четвёртых, на крупногабаритных элементах конструкций будут возникать значительные температурные деформации вследствие достигающих 250 градусов Цельсия перепадов температур затенённых и освещённых Солнцем элементов. Вследствие этих обстоятельств, применимость подобной техники в лунных условиях представляется крайне сомнительной, а сама по себе доставка на Луну массивной и крупногабаритной техники, предназначенной для раздельного выполнения отдельных операций с лунным грунтом, не соответствует базовым принципам формирования полезной нагрузки транспортных систем космических экспедиций. Соответственно, они не могут рассматриваться в качестве прототипов изобретения робототехнического комплекса для создания строений/укрытий на Луне.
Задачами предлагаемого изобретения являются реализация принципа минимализации количества операций процесса заготовки и перемещения лунного грунта, и принципа совмещения операций по преобразованию лунного грунта в строительный материал и его укладки в тело ограждающих конструкций создаваемого строения.
Первый принцип реализуют сведением операций по заготовке и перемещению лунного грунта к однократному применению одного вида воздействия на грунт в конструкции экскавационно-транспортной системы, включающей приведённый от вибратора пенетраторный ковш/ковши и вибротранспортную систему/системы из шарнирно состыковываемых вибротранспортных лотков для перемещения реголита от пенетраторного ковша до фототермической установки. Такая экскавационно-транспортная система создаёт непрерывный поток реголита в рабочую камеру фототермической установки с помощью одного стационарного агрегата без применения автономных мобильных экскавационных, погрузочных и транспортных агрегатов. Стационарный агрегат значительно эффективней комплекта из автономных мобильных агрегатов по соотношениям производительность-собственная масса и энергоэффективности вследствие отсутствия у стационарной установки шасси с трансмиссией, движителями, устройствами управления, а также силовых элементов конструкции, распределяющих нагрузку на движитель по корпусу агрегата, и систем навигации и ориентации. Элементы конструкции экскавационно-транспортной системы изготавливают известными способами из известных материалов в различных вариантах исполнения в соответствии с требованиями к производительности и массогабаритным характеристикам системы.
Второй принцип реализуют в конструкции фототермической установки, состоящей из приёмника-дозатора, фототермической камеры и формователя-охладителя. Установка принимает поток реголита в приёмник-дозатор, придающий потоку необходимую ширину, высоту и равномерность. Сформированный поток реголита из приёмника-дозатора подаётся в термическую камеру установки, изготовленную из жаростойких материалов с низкоадгезионной поверхностью. В термической камере на поверхность движущегося слоя реголита воздействует высококонцентрированный солнечный свет в течение времени, необходимого для прогревания реголита по всей высоте потока до температуры плавления. Расплавленный реголит в виде пластической массы симинала самотёком, или с помощью приведённого от двигателя валика с лопастями, или магнитогидродинамического экструдера вытесняют из термической камеры в зазор между поверхностью затвердевшего слоя симинала в теле ограждающих конструкций возводимого строения/укрытия, и внутренней поверхностью формователя-охладителя с установленной/установленными на его наружной поверхности панелью/панелями радиаторов охлаждения. При строительстве на участке с реголитом с низкой температуропроводностью и теплопроводностью фототермическая установка не создаёт объёмной массы расплава симинала, а прогревает до плавления тонкий слой реголита, который приёмник-дозатор подаёт на твёрдую поверхность предыдущего уложенного в тело ограждающих конструкций строения/укрытия слоя реголита. Фототермическую установку изготавливают любыми известными способами из традиционно применяемых в теплотехнике известных термо- и теплостойких материалов. Варианты исполнения конструкции установки определяют в соответствии с конкретными требованиями по производительности и массогабаритным характеристикам и исходя из технологических возможностей и иных производственных обстоятельств.
В данном случае представление конструкции конкретного исполнения экскавационно-транспортной системы и/или фототермической установки является избыточным, поскольку не даёт недостающей в описании изобретения информации, необходимой для реализации изобретения, но приводит к сужению объёма защищаемой интеллектуальной собственности, ограниченной лишь принципиальными отличиями от известного уровня техники для выполнения строительных работ на лунной поверхности.
Пенетраторный ковш представляет собой выполненный из металла или износостойкого композитного материала прямоугольный или овальный в поперечном сечении короб со ступенеобразным рифлением на внутренних и наружных поверхностях его днища и стенок, приведённый от вибратора с возможностью внедрения в лунный реголит под углом к поверхности грунта и соединённый с первым вибротранспортным лотком так, чтобы при колебаниях короба под воздействием вибратора рифление на его стенках приводит реголит внутри короба в поступательное движение в направлении к вибротранспортному лотку. Внутренние поверхности днища и стенок вибротранспортных лотков также выполняют со ступенеобразным рифлением, приводящим реголит внутри лотка в направленное результирующее движение при вибрации лотка под действием приводного вибратора.
Вибротранспортная система имеет вид соединённых между собой шарнирами с возможностью относительных отклонений лотков, приведённых от вибраторов с возможностью продольных или круговых колебаний и установленные на штативах с обеспечением определённого угла наклона лотков к горизонту. Лотки и шарниры изготавливают из известных материалов известными способами.
Электрическую энергию для приведения в действие экскавационно-транспортной системы и иных потребителей в составе прилуняемого комплекса поставляет по кабелям солнечная электростанция, размещённая на посадочной ступени транспортного космического корабля и автоматически раскрывающаяся после прилунения ступени и ориентирующаяся на Солнце. Также, солнечная электростанция может быть выполнена в виде отдельно расположенного на местности комплекта панелей фотоэлектронных преобразователей, установленных на штативах с устройством автоматической ориентации на Солнце. Зарядную станцию для перезарядки аккумуляторных батарей с автоматом переустановки располагают на посадочном модуле. Панели преобразователей, штативы, устройства ориентации панелей и автомат перезарядки изготавливают из традиционно применяемых в космонавтике материалов известными способами.
Концентрированный солнечный свет для фототермической установки поставляет солнечный концентратор, включающий автономные тарельчатые солнечные отражатели или плоские линейные отражатели Френеля, установленные на штативах с сервомеханизмами ориентации на Солнце и неподвижные и подвижный/подвижные вторичные отражатели и/или трубопроводный световод, выход которого соединяют с фототермической установкой. Автономные светоотражатели устанавливают на раскладных штативах с распределением на местности соответственно его рельефу и направлениям на Солнце и на участок строительства. Вторичные отражатели устанавливают на приведённых от серводвигателей штативах, управляемых системой слежения за положением фототермической установки или входного конденсора трубопроводного световода. Конструкция системы слежения не относится к объектам патентования. Светоотражатели, трубопроводный световод и штативы изготавливают известными способами из известных материалов и комплектующих, традиционно применяемых в космонавтике.
Для выполнения задач, связанных с перемещениями оборудования для определения топографических и геоминералогических характеристик местности, выбором участка строительства, перемещениями элементов экскавационно-транспортной системы и фототермической установки, сборкой экскавационно-транспортной системы, расстановкой панелей солнечной электростанции и отражателей солнечного концентратора и светопроводной системы со вторичными отражателями и трубопроводного световода применяют агрегатированного на высокоподвижном шасси и оснащённого сенсорной и навигационной системами автономного мобильного манипуляторного робота. В электронном устройстве управления мобильного робота устанавливают адаптивную самообучающуюся программу обработки данных сенсорной системы и выработки управляющих команд для рабочих органов робота. Программа вырабатывает управляющие команды на рабочие органы по циклограммам распаковки оборудования и доставки его на участок строительства, сборки солнечной электростанции, солнечного концентратора и светопроводной системы, сборки экскавационно-транспортной системы, перемещении фототермической установки при создании ограждающих конструкций строения/укрытия с корректировкой решения нештатных кинематических задач, возникающих в ходе выполнения работ. Выбор решений на корректировку циклограмм осуществляется программой в соответствии с архитектурным планом строения/укрытия, с рельефом местности, с особенностями грунта на участке строительства, с текущей ситуацией процесса создания строения/строений и историей её возникновения. Также программа учитывает данные сенсорной системы о техническом состоянии узлов и ключевых элементов робототехнического комплекса. Контроль над критериями выбора решений и оценку результатов выполнения действий по их осуществлению выполняет подпрограмма стратегического целеполагания и оперативного планирования на основе модифицированных биоинспирированных алгоритмов. Обмен информацией между элементами робототехнического комплекса осуществляется с помощью известных систем радиосвязи.
Оборудование экскавационно-транспортной системы комплекса собственными приводами для перемещения фототермической установки нецелесообразно, поскольку приводит к избыточности энергопотребляющего массивного оборудования комплекса из-за простаивания мобильного робота во время работы системы.
Шасси мобильного робота обеспечивает ему глобальную и частично региональную подвижности. Эти подвижности составляют ключевую способность мобильного робота, определяющую возможность выполнения всего многообразия задач по сборке оборудования и возведению строительных объектов. Для работы в условиях лунной экспедиции шасси должно обладать высокими энергоэффективностью, маневренностью, проходимостью, управляемостью и наблюдаемостью управления. В наибольшей степени таким набором характеристик обладает статически уравновешенное двухколейное двухколёсное шасси – далее одноосное шасси с динамическим управлением остойчивостью. По компоновочным и массогабаритным характеристикам агрегаты на одноосных шасси существенно превосходят аналоги на традиционных многоколёсных и гусеничных шасси. Это обусловлено значительно меньшим коэффициентом концентрации нагрузок на движителях и меньшими динамическими нагрузками на них, а также практическим отсутствием избыточных связей, что позволяет снизить массу силовых элементов конструкции шасси. Высокие динамические характеристики одноосного шасси обеспечивают подавлением маятникового раскачивания корпуса за счёт дополнительной внутренней подвижности в виде возможности управляемого перемещения центра масс робота относительно движителей шасси. Величина смещения центра масс робота и его первая и вторая производные определяются динамическим режимом движения робота и динамикой внешних нагрузок на манипуляторах. Соответственно, сохранение остойчивости робота в динамических режимах работы за счёт относительного смещения центра масс называют динамическим управлением остойчивостью. Структурная схема конструкции статически уравновешенного одноосного шасси известна. Подетальную разработку конструкции шасси проводят в соответствии с техническим заданием на создание робототехнического комплекса. Детали конструкции мобильного робота изготавливают известными способами из известных в аэрокосмической отрасли материалов.
Основную часть региональной подвижности и локальную подвижность мобильного робота осуществляет/осуществляют манипулятор/манипуляторы. Их конструкцию и силомоментные и динамические характеристики и устройство схватов определяют соответственно массогабаритным характеристикам и особенностям конструкции элементов экскавационно-транспортной системы и элементов конструкций солнечной электростанции и солнечного концентратора, конструкций соединительных разъёмов и муфт кабелей. При разработке конструкций элементов робототехнического комплекса обеспечивают взаимное соответствие между ними и схватами манипуляторов робота, что, в свою очередь, обеспечивает возможность применения простых и надёжных схватов известных конструкций.
Применяют робототехнический комплекс следующим образом.
Элементы комплекса загружают в транспортный отсек/отсеки посадочного модуля космического корабля для доставки на Луну соответственно массогабаритным характеристикам элементов и центровочным требованиям посадочного модуля и с учётом последовательности выгрузки комплекса после прилунения. После посадки модуля на поверхность Луны в устройстве управления мобильного робота запускаются программы выполнения циклограмм выхода на поверхность Луны, обследования местности в районе посадки, создания цифровой модели рельефа местности с картой распределения мощности и химико-гранулометрического состава слоя реголита, разработки цифрового проекта расположения на местности солнечной электростанции, солнечного концентратора, экскавационно-транспортной системы и конструкции строения/укрытия, согласования проекта с наземным центром управления программой экспедиции. После одобрения центром проекта на роботе запускаются программы выполнения циклограмм выгрузки элементов комплекса и строительных конструкций и их распределения на местности с последующим переходом к сборке систем.
Для снижения уровня загрязнения элементов конструкций комплекса налипающими частицами реголита может быть использована укладка дорожек и грузовых площадок из доставленной с Земли в рулоне прочной плёнки, предотвращающей контакт движителей мобильного робота и элементов конструкций комплекса с реголитом. Также, может быть использовано закрепление поверхности реголита связыванием её высокоадгезионным пенным материалом из вещества с низким давлением паров насыщения, доставляемого на Луну в баллоне высокого давления. Для этого в программу выработки управляющих сигналов для рабочих органов робота включают циклограммы выполнения укладки плёнки из рулона и/или связывания верхнего слоя реголита пенным материалом из баллона высокого давления.
Завершив отработку циклограмм сборки, соединения кабелями и тестирования систем комплекса, мобильный робот переходит к выполнению циклограмм приведения в готовность к работе фототермической установки, активирует солнечный концентратор и запускает экскавационно-транспортную систему. Пенетраторный ков/ковши системы погружаются в реголит и подают реголит на лотки вибротранспортной системы. Поток реголита в виде тонкого слоя перемещается по вибрирующим лоткам и поступает в приёмник-дозатор фототермической установки, затем в термическую камеру или на место спекания в теле ограждающих конструкций строения/укрытия, где подвергается экспонированию высококонцентрированным солнечным светом и превращается в массу симинала и экструдируется в тело ограждающих конструкций возводимого строения, или спекается в слой материала в ограждающей конструкции.
В ходе возведения твердотельных несущих конструкций строений/укрытий мобильный робот в соответствии с архитектурным планом строения закладывает в тело ограждающих конструкций муфты и разъёмы герметичных вводов кабелей и трубопроводов, а также комингсы люков и иллюминаторов.
Наращивание поглощающей массы ограждающих конструкций строений/укрытий после завершения возведения твёрдотельных несущих конструкций может быть выполнено различными способами и не является предметом данного изобретения.
Конкретные численные значения мощности солнечной электростанции и солнечного концентратора, мощности и рабочей частоты виброприводов и т.п. характеристики систем комплекса определяют соответственно техническому заданию на возведение строений/укрытий на Луне, требованиям к полезной нагрузке космической транспортной системы и свойствам реголита на участке строительства.
Для сохранения работоспособности комплекса в период лунной ночи используют запасаемую в зарядной станции энергию. Техническое решение задачи обеспечения работоспособности комплекса после лунной ночи может быть реализовано различными способами и не является предметом данного изобретения.
Технический результат от применения робототехнического комплекса заключается в достижении выполнимости задачи безлюдного создания на Луне строений/укрытий для личного состава лунных экспедиций, систем жизнеобеспечения, научного и/или производственного оборудования посредством, во-первых, снижения номенклатуры, общей массы и габаритов элементов строительного комплекса до уровня, позволяющего доставить весь комплект оборудования для безлюдного возведения строений/укрытий на Луне одним стартом космической транспортной системы. Во-вторых – в радикальном снижении количества перемещающихся по поверхности Луны технических устройств с соответствующим снижением уровня сложности осуществления проекта с доставкой на Луну, приведения в рабочее состояние и эксплуатации строительного оборудования, а также снижения вероятности отказов и аварийных ситуаций.
| название | год | авторы | номер документа |
|---|---|---|---|
| Унифицированный роботизированный строительный комплекс для возведения зданий и сооружений в горной местности с использованием аддитивных технологий и способ возведения зданий и сооружений в горной местности посредством унифицированного роботизированного строительного комплекса | 2024 |
|
RU2836441C1 |
| Высокоподвижный исследовательский планетоход | 2022 |
|
RU2780069C1 |
| КОНСТРУКЦИЯ ЗАЩИТНОГО СООРУЖЕНИЯ ОБИТАЕМОЙ СТАНЦИИ НА ПОВЕРХНОСТИ ЛУНЫ И СПОСОБ ЕЁ ВОЗВЕДЕНИЯ | 2022 |
|
RU2802277C1 |
| УСТРОЙСТВО ДЛЯ ДОБЫЧИ ВОДЫ НА ЛУНЕ | 2021 |
|
RU2770385C1 |
| Мультиагентный робототехнический поисково-спасательный комплекс | 2021 |
|
RU2773987C1 |
| Высокомобильный транспортный робот для перемещения палетированных грузов | 2022 |
|
RU2798652C1 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ ВОДЯНОГО ПАРА НА ЛУНЕ | 2022 |
|
RU2775188C1 |
| Робототехнический комплекс для обеспечения общественной безопасности | 2020 |
|
RU2757747C1 |
| Роботизированный комплекс для создания строительных элементов на космическом объекте | 2017 |
|
RU2670836C9 |
| Способ зондирования лунного грунта | 2017 |
|
RU2667695C1 |
Робототехнический комплекс для безлюдного создания строений/укрытий на Луне включает стационарный модуль, образованный посадочной ступенью космического корабля с установленными на нём системами связи, солнечной электростанцией с зарядной станцией для энергообеспечения комплекса и для подзарядки аккумуляторных батарей мобильного модуля комплекса, стационарную экскавационно-транспортную систему с приведённым от вибратора пенетраторным ковшом и вибротранспортной системой из сочленённых лотков, переправляющих поступающий из пенетраторного ковша реголит в фототермическую установку. Также, робототехнический комплекс включает солнечную электростанцию, солнечный концентратор, световодную систему и мобильный манипуляторный робот на высокоподвижном шасси. Мобильный робот выполняет действия по перемещению элементов стационарных систем комплекса и их сборку, а также перемещает фототермическую установку в ходе возведения твердотельных несущих элементов ограждающих конструкций строения/укрытия. Световодная система подаёт концентрированный солнечный свет в фототермическую установку и экспонирует дозированный поток реголита с образованием симинала, который экструдируется из термической камеры фототермической установки в тело защитных конструкций, или реголит подаётся непосредственно в тело ограждающих конструкций и спекается под действием потока концентрированного света. В результате замещения номенклатуры автономной мобильной строительной техники традиционных конструкций стационарной экскавационно-транспортной системой с присоединённой фототермической установкой, значительно снижается масса и габариты доставляемого на Луну оборудования и снижается уровень сложности управления процессом возведения на Луне строений/укрытий. Технический результат изобретения заключается в обеспечении выполнимости решения задачи безлюдного возведения на Луне строений/укрытий для личного состава лунных экспедиций, систем жизнеобеспечения и научного и/или производственного оборудования посредством обеспечения возможности доставки строительного оборудования на Луну одним стартом космической транспортной системы. 10 з.п. ф-лы, 5 ил.
1. Робототехнический комплекс для безлюдного создания строений/укрытий на Луне, включающий стационарный модуль, образованный посадочной ступенью космического корабля с установленными на нём системами связи, солнечной электростанцией с аккумуляторной станцией для энергообеспечения комплекса и для подзарядки аккумуляторных батарей мобильного модуля комплекса; мобильный модуль комплекса, представляющий собой агрегатированный на высокопроходимом шасси манипуляторный робот, оснащённый системами навигации, сенсорной системой с дистанционными и тактильными датчиками, видеокамерой/видеокамерами и сканирующим лазерным дальномером/дальномерами и системой управления на основе компьютера с установленной на нём самообучающейся программой обработки данных сенсорной системы и выработки управляющих команд для рабочих органов робота в соответствии с архитектурным планом строения/строений/укрытий, с рельефом местности, с особенностями грунта на участке строительства, с текущей ситуацией процесса создания строения/строений и историей её возникновения, а также в соответствии с техническим состоянием робототехнического комплекса в целом, стратегическим целеполаганием и оперативным планированием исполнения специальных алгоритмов, представляющих собой биоинспирированные алгоритмы; солнечный концентратор с самонаводящимися панелями-рефлекторами; светопроводную систему; фототермическую установку; виброподборщик реголита в виде пенетраторного ковша/ковшей и вибротранспортную систему подачи реголита в фототермическую установку.
2. Робототехнический комплекс для безлюдного создания строений/укрытий на Луне по п.1, отличающийся тем, что фототермическая установка включает приёмник-дозатор, термическую камеру и формовочно-охладительную приставку с радиатором/радиаторами переизлучения теплоты остывающей массы симинала, уложенной в ограждающие конструкции возводимого строения/укрытия.
3. Робототехнический комплекс для безлюдного создания строений/укрытий на Луне по п.2, отличающийся тем, что радиатор/радиаторы переизлучения теплоты формовочно-охладительной приставки фототермической установки ориентируются относительно направления на Солнце.
4. Робототехнический комплекс для безлюдного создания строений/укрытий на Луне по п.2, отличающийся тем, что фототермическая установка подаёт поток реголита в тело ограждающей конструкции и прогревает его до спекания.
5. Робототехнический комплекс для безлюдного создания строений/укрытий на Луне по п.1, отличающийся тем, что солнечная электростанция располагается на местности и имеет вид комплекта панелей фотоэлектронных преобразователей, установленных на штативах с устройством автоматической ориентации на Солнце.
6. Робототехнический комплекс для безлюдного создания строений/укрытий на Луне по п.1, отличающийся тем, что концентраторы солнечного света представляют собой тарельчатые отражатели или плоские линейные отражателя Френеля, установленные на штативах с сервомеханизмами ориентации на Солнце.
7. Робототехнический комплекс для безлюдного создания строений/укрытий на Луне по п.1, отличающийся тем, что светопроводная система включает трубопроводный световод с входным конденсором.
8. Робототехнический комплекс для безлюдного создания строений/укрытий на Луне по п.1, отличающийся тем, что вторичные отражатели устанавливают на приведённых от серводвигателей штативах, управляемых системой слежения за положением фототермической установки или входного конденсора трубопроводного световода.
9. Робототехнический комплекс для безлюдного создания строений/укрытий на Луне по п.1, отличающийся тем, что мобильный робот комплекса представляет собой агрегатированный на одноосном шасси с динамическим управлением остойчивостью и оснащённый сенсорной и навигационной системами и манипулятором/манипуляторами автономный агрегат, в электронном устройстве управления которого установлена адаптивная самообучающаяся программа обработки данных сенсорной системы и выработки управляющих команд для рабочих органов робота под контролем подпрограммы стратегического целеполагания и оперативного планирования на основе биоинспирированных алгоритмов.
10. Робототехнический комплекс для безлюдного создания строений/укрытий на Луне по п.1, отличающийся тем, что стационарный модуль комплекса включает зарядную станцию для подзарядки аккумуляторных батарей и устройство автоматической замены аккумуляторных батарей на мобильном модуле.
11. Робототехнический комплекс для безлюдного создания строений/укрытий на Луне по п.1, отличающийся тем, что программа выработки управляющих сигналов на рабочие органы в устройстве управления мобильного робота включает циклограммы укладки на реголит на маршрутах перемещений по участку строительства плёночного покрытия из рулона, и/или закрепления верхнего слоя реголита связыванием его высокоадгезионным пенным материалом из баллона высокого давления.
| АВТОМАТ ДЛЯ ИЗГОТОВЛЕНИЯ ПОЛУФАБРИКАТОВВВОДОВ | 0 |
|
SU180696A1 |
| Роботизированный комплекс для создания строительных элементов на космическом объекте | 2017 |
|
RU2670836C9 |
| RU 2018129132 A, 10.02.2020 | |||
| US 5086999 A1, 11.02.1992 | |||
| CN 103803100 A, 21.05.2014 | |||
| Раков А.П | |||
| Концепция обитаемого космоса и перспектива колонизации лунной поверхности // Innovative project | |||
| Токарный резец | 1924 |
|
SU2016A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |

