Изобретение относится к области измерений параметров подвижного объекта, в частности к устройствам для измерения величины (модуля), угла направления (аэродинамического угла) вектора скорости и других параметров движения подвижного объекта относительно окружающей воздушной среды, и может быть использовано в качестве датчика аэродинамического угла (угла атаки или скольжения), истинной воздушной скорости и других высотно-скоростных параметров летательного аппарата, в частности самолета.
Известны устройства для измерения величины и угла направления вектора скорости газового (воздушного) потока, реализующие аэродинамический метод (способ) измерения (Петунин А.Н. Методы и техника измерений параметров газового потока (приемники давления и скоростного напора). М.: Машиностроение, 1972. - 332 с. - [1]; Горлин С.М., Слезингер И.И. Аэромеханические измерения. Методы и приборы. М.: Наука, 1964. - 636 с. - [2]).
В таких устройствах в контролируемый набегающий воздушный поток вносится приемник давлений, например, в виде сферического тела с цилиндрическим основанием, который воспринимает полное и статическое давления набегающего воздушного потока, по которым определяется величина (модуль) вектора скорости набегающего воздушного потока. Этот же приемник воспринимает давления, несущие информацию об угловом положении вектора скорости набегающего воздушного потока относительно осей приемника, по которым определяются углы направления вектора скорости набегающего воздушного потока.
Применение таких устройств для измерения величины (модуля) и аэродинамического угла (угла атаки и скольжения) вектора истинной воздушной скорости летательного аппарата, в частности самолета, связано с необходимостью вынесения приемников давлений за пределы пограничного слоя летательного аппарата, что неизбежно приводит к нарушению аэродинамики летательного аппарата, усложнению конструкции, датчика аэродинамического угла и воздушной скорости. При этом изменение состояния окружающей воздушной среды (плотности, температуры, атмосферного давления, влажности, загрязнений и т.п.) приводит к появлению дополнительных погрешностей измерения, снижают надежность работы датчика.
Известны устройства для измерения величины и угла направления вектора истинной воздушной скорости подвижного объекта, реализующие кинематический метод измерения, при котором в набегающий воздушный поток вносится метка и с помощью регистраторов контролируется скорость и направление (траектория) движения метки совместно с потоком (Патент США №2872609, кл 73-180. - 1959 - [3]; Заявка Японии №49-622, G01C 17/26. - 1972. - [4]).
Известно устройство для измерения параметров подвижного объекта (Авторское свидетельство №735065, СССР, G01C 21/12, 1980 - [5]), которое содержит источник излучения (метки), в виде генератора ионов, систему приемников ионной метки, выполненную в виде кодовой маски, размещенной на обшивке подвижного объекта, схему регистрации траектории движения ионной метки и измерительную схему формирования выходного сигнала по измеряемому углу направления вектора воздушной скорости (угла атаки или скольжения) подвижного объекта.
Генератор ионных меток, выполненный в виде источника импульсного высоковольтного напряжения, выдает импульс, который подается на разрядник. За счет искрового разряда разрядника образуется ионизированная область - ионная метка с явно выраженным электростатическим зарядом определенной полярности. Заряженная ионная метка перемещается совместно с набегающим воздушным потоком и приобретает его параметры движения - скорость и направление относительно системы приемных электродов. При перемещении ионной метки совместно с воздушным потоком по направлению его движения траектория ионной метки пересекает приемные электроды кодовой маски, которые лежат на пути ее движения, наводя (индуцируя) на них электростатические заряды, комбинация которых образует определенный код, соответствующий углу направления траектории метки, т.е. углу направления вектора воздушной скорости подвижного объекта. Наведенные электростатические заряды фиксируются регистраторами, связанными с приемными электродами. Выходные сигналы регистраторов поступают в измерительную схему формирования выходных сигналов, которые после расшифровки (дешифрации) комбинации сигналов регистраторов ионных меток выдает выходной сигнал, пропорциональный углу направления вектора истинной воздушной скорости подвижного объекта, который поступает на индикатор к другим потребителям.
За прототип взят меточный датчик аэродинамического угла и воздушной скорости, в котором одновременно измеряется аэродинамический угол и истинная воздушная скорость, которые определяются с помощью системы приемных электродов, расположенных на одинаковом расстоянии по окружности с центром в точке генерации ионной метки. При этом измерительная схема формирования выходных сигналов выполнена в виде канала измерения истинной воздушной скорости, канала определения рабочего сектора измеряемого угла, являющегося каналом грубого отсчета, и канала точного измерения угла в рабочем секторе, подключенных ко входу вычислительного устройства, выходы которого являются цифровыми кодами по измеряемому аэродинамическому углу и истинной воздушной скорости (Патент РФ на изобретение №2445634, МПК G01P 5/14. Меточный датчик аэродинамического угла и воздушной скорости / Ганеев Ф.А., Солдаткин В.М., Уразбахтин И.Р., Макаров Н.Н., Кожевников В.И. Заявл. 05.05.2010, №201018253/28. Опубл. 20.03.2012. Бюл. №8 - [6]).
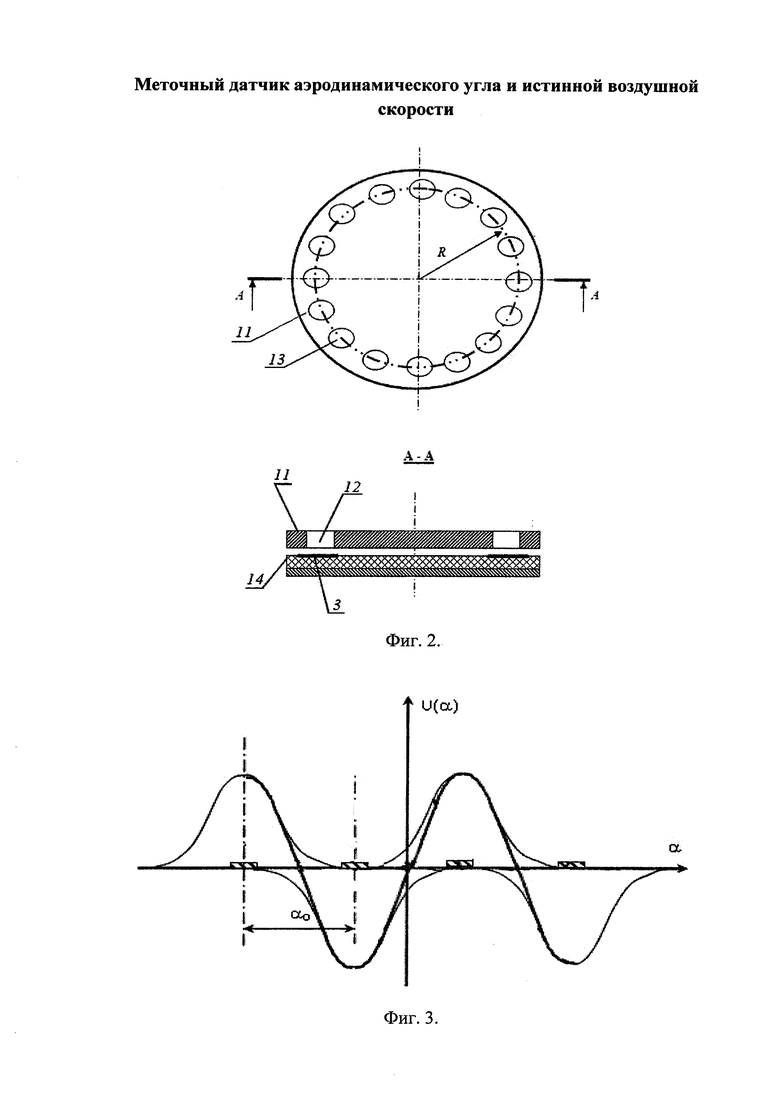
На фиг. 1 показана функциональная схема устройства-прототипа. На фиг. 2 показана конструктивная схема системы приемных электродов, на фиг. 3 показан принцип формирования синусоидального и косинусоидального информативных сигналов с помощью системы расположенных по окружности дискретных приемных электродов.
Функциональная схема устройства-прототипа (фиг. 1) содержит плату 1 с приемными электродами 3 в виде круглых металлических пластин, расположенных на одинаковом расстоянии по окружности радиусом R с центром в точке 0 генерации ионной метки с помощью разрядника 2. Приемные электроды 3 соединены со входами предварительных усилителей 4 (ПУ) канала регистрации ионы меток, расположенных в блоке предварительных усилителей 5 (БПУ). Приемные электроды выполнены совместно с предварительными усилителями в виде автономных модулей, расположенных в БПУ, и образуют канал регистрации ионных меток. Выводы блока предварительных усилителей подключены ко входу канала точного измерения угла 6 (канал точного измерения аэродинамического угла), ко входу канала измерения воздушной скорости 7 и ко входу канала определения рабочего сектора 8 измеряемого аэродинамического угла (канал грубого отсчета). Выходы всех указанных каналов подключены ко входу вычислительного устройства 9 (ВУ), выходы которого являются цифровыми кодами по аэродинамическому углу Nα и воздушной скорости NV.
На выходе вычислительного устройства 9 также формируется выходной сигнал FГМ, который является управляющим входом генератора меток 10 и задает частоту генерации ионных меток и начало цикла измерения аэродинамического угла и воздушной скорости.
Плата 1 с приемными электродами 3 выполнена на основе металлической маски (фиг. 2), которая представляет собой тонкую металлическую пластину 11, на которой имеются отверстия 12, расположенные на одинаковом расстоянии l по окружности радиусом R. Под маской 11 находится диэлектрическая плата 14 с приемными электродами 3. Электроды 3 располагаются непосредственно под отверстиями 12 металлической маски 11.
Данная конструкция системы приемных электродов является достаточно простой для реализации и позволяет обеспечить высокую точность формирования синусоидальных и косинусоидальных угловых характеристик информативных сигналов приемных электродов (фиг. 3). Форма угловой характеристики многоэлементной электродной системы определяется формой характеристики отдельного дискретного приемного электрода, взаимным расположением электродов и схемой подключения их к предварительным усилителям канала регистрации ионных меток.
Меточный датчик аэродинамического угла и воздушной скорости работает следующим образом.
Меточный датчик аэродинамических углов и воздушной скорости устанавливается на летательном аппарате таким образом, чтобы система 1 приемными электродами 3 (фиг. 1) находилась в плоскости изменения аэродинамического угла α вектора 
За счет выбора конструктивных параметров системы приемных электродов (фиг. 2) с помощью приемных электродов формируются положительные и отрицательные полуволны синусоидальных угловых характеристик информативных сигналов U(α) (фиг. 3) на выходе четных предварительных усилителей.
С помощью нечетных приемных электродов формируются положительные и отрицательные полуволны косинусоидальных угловых характеристик информативных сигналов U(α) на выходе нечетных предварительных усилителей.
Выходные сигналы предварительных усилителей 4 блока предварительных усилителей 5 (фиг. 1) подаются на входы канала определения рабочего сектора (канал грубого отсчета) измеряемого аэродинамического угла, канал точного измерения угла 6 в рабочем секторе и канал измерения воздушной скорости 8. Выходные сигналы указанных каналов подаются на входы вычислительного устройства 9, который по результатам обработки входной информации выдает цифровые коды Nα, NV по измеряемому аэродинамическому углу α и воздушной скорости VB.
С учетом попадания траектории ионной метки в i-ый грубый канал текущее значение измеряемого аэродинамического угла определяется как

где αo - угол, охватывающий рабочий сектор грубого канала отсчета (при imax=4, αo=90°); i - номер рабочего сектора (
Сигналы, пропорциональные синусу Asinαi и косинусу Acosαi, измеряемого угла в рабочем секторе грубого канала обрабатываются в вычислительном устройстве, на выходе которого выдается цифровой код Nαm, связанный со значением αр измеряемого аэродинамического угла точного канала соотношением

где αi - текущее значение аэродинамического угла в пределах i-го рабочего сектора.
При работе канала измерения истинной воздушной скорости формируется интервал времени τV пролета ионной метки расстояния R от точки генерации ионной метки до окружности с приемными электродами. В соответствии с интервалом времени τV в вычислительном устройстве вырабатывается цифровой код NV, пропорциональный величине истинной воздушной скорости

Цифровые коды Nα, NV подаются на средства отображения информации к другим потребителям.
Таким образом, меточный датчик аэродинамического угла и истинной воздушной скорости не имеет выступающих в набегающий воздушный поток аэрометрических приемников, нарушающих аэродинамику летательного аппарата.
В меточном датчике аэродинамического угла и воздушной скорости реализуется кинематический метод измерения величины (модуля) и угла направления вектора истинной воздушной скорости, при котором точность измерения аэродинамического угла и истинной воздушной скорости не зависит от состояния окружающей среды (температуры, атмосферного давления, плотности, влажности и т.п.).
Выполнение системы приемных электродов в виде расположенных по окружности металлических пластин, установленных под отверстиями маски, позволяет сформировать логометрические информативные сигналы с синусоидальной и косинусоидальной угловыми характеристиками и обеспечить измерение аэродинамического угла во всем диапазоне его изменения, т.е. от 0 до 360° или ±180° без увеличения габаритных размеров системы приемных электродов. При этом конструктивное выполнение приемных электродов совместно с предварительными усилителями канала регистрации в виде автономных модулей позволяет существенно повысить помехоустойчивость канала регистрации ионных меток и увеличить разрешающую способность по аэродинамическому углу и истинной воздушной скорости при малых габаритах системы приемных электродов.
Выполнение измерительной схемы формирования выходных сигналов в виде канала определения рабочего сектора измеряемого угла, являющегося каналом грубого отсчета, и канала точного измерения угла в каждом из рабочих секторов, подключенных к вычислительному устройству, позволяет существенно повысить разрешающую способность по измеряемому аэродинамическому углу во всем диапазоне его изменения без увеличения числа приемных электродов и габаритных размеров системы приемных электродов.
Предложенное выполнение каналов определения рабочего сектора измеряемого угла и канала точного измерения аэродинамического угла внутри каждого рабочего сектора обеспечивает надежное определение рабочего сектора и точное измерение текущего значения угла внутри каждого рабочего сектора, что также позволяет повысить точность измерения в широком диапазоне изменения аэродинамического угла при одновременном изменении величины истинной воздушной скорости.
Предложенное выполнение канала измерения истинной воздушной скорости позволяет с высокой точностью формировать интервал времени пролета ионной метки от точки генерации до окружности с приемными электродами при одновременном изменении аэродинамического угла, что повышает точность измерения воздушной скорости.
Однако устройство-прототип имеет ряд недостатков, связанных с ограниченными функциональными возможностями по определению других высотно-скоростных параметров, определяющих движение летательного аппарата относительно окружающей воздушной среды. Это ограничивает применение меточного датчика на самолетах и других летательных аппаратах, в том числе беспилотных и дистанционно-пилотируемых.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в повышении эффективности применения меточного датчика:
1) в расширении функциональных возможностей за счет одновременного измерения всех высотно-скоростных параметров, определяющих движение летательного аппарата относительно окружающей воздушной среды;
2) в измерении высотно-скоростных параметров движения летательного аппарата с помощью одного многофункционального датчика;
3) в расширении функциональных возможностей одного многофункционального меточного датчика практически без усложнения его конструктивной схемы.
Технический результат достигается следующим образом.
В меточном датчике аэродинамического угла и истинной воздушной скорости, содержащем генератор ионных меток, систему приемных электродов в виде круглых металлических пластин, расположенных на одинаковом расстоянии по окружности с центром в точке генерации ионной метки и установленных непосредственно под отверстиями закрепленной на диэлектрической плате металлической пластины - маски, канала регистрации ионных меток и измерительную схему формирования выходных сигналов в виде канала определения рабочего сектора измеряемого угла, являющегося каналом грубого отсчета, канала точного измерения угла и канала истинной воздушной скорости, подключенных ко входу вычислительного устройства, выходы которого являются цифровыми выходами по аэродинамическому углу и истинной воздушной скорости, новым является то, что генератор ионных меток выполнен в виде генератора пилообразного напряжения, подаваемого на искровой разрядник, в цепь разряда которого включена схема регистрации момента искрового пробоя межэлектродного промежутка искрового разрядника, выход которой подключен к управляющему входу схемы измерения напряжения на выходе генератора пилообразного напряжения в момент пробоя межэлектродного промежутка искрового разрядника, при этом выход схемы измерения напряжения на выходе генератора пилообразного напряжения в момент пробоя межэлектродного промежутка искрового разрядника подключен ко входу вычислительного устройства, которое выполнено в виде вычислителя, реализующего как алгоритмы определения аэродинамического угла и истинной воздушной скорости, так и алгоритмы определения других высотно-скоростных параметров, определяющих движение летательного аппарата относительно окружающей воздушной среды - барометрической высоты, температуры наружного воздуха, плотности воздуха на данной высоте полета, приборной скорости и числа Маха, согласно уравнениям



где i - номер рабочего сектора грубого канала, в котором находится ионная метка; αo - угол, охватывающий рабочий сектор грубого канала отсчета аэродинамического угла (при 
Сущность изобретения поясняется на фиг. 4.
На фиг. 4 приведена функциональная схема меточного датчика аэродинамического угла и истинной воздушной скорости с расширенными функциональными возможностями.
Здесь: 1 - плата с приемными электродами 3 (ПЭ); 2 - искровой разрядник; 15 - схема регистрации момента искрового пробоя межэлектродного промежутка искрового разрядника; 10 - генератор меток, выполненный в виде генератора пилообразного напряжения; 16 - схема измерения напряжения на выходе генератора пилообразного напряжения в момент пробоя межэлектродного промежутка искрового разрядника; 5 - блок предварительных усилителей канала регистрации ионных меток; 17 - измерительная схема (ИС), включающая канал определения рабочего сектора 8 (канал грубого отсчета), канал точного измерения угла 6 и канал измерения воздушной скорости 7; 9 - вычислительное устройство (ВУ).
Функциональная схема меточного датчика аэродинамического угла и истинной воздушной скорости с расширенными функциональными возможностями (фиг. 4) содержит плату 1 с приемными электродами 3 (ПЭ) в виде круглых металлических пластин, расположенных на одинаковом расстоянии по окружности радиусом R с центром в точке 0 генерации ионной метки, в которой установлен искровой разрядник 2, подключенный к выходу генератора меток 10 (ГМ). Приемные электроды соединены со входами предварительных усилителей 4, расположенных в блоке предварительных усилителей 5 (БПУ) канала регистрации ионных меток 15. Выходы БПУ подключены ко входам каналов измерительной схемы 16 (ИС) - канала определения рабочего сектора 8 (канала грубого отсчета), канала точного измерения угла 6 в рабочем секторе и канала измерения воздушной скорости 7. Выходы каналов измерительной схемы ИС подключены ко входу вычислительного устройства 9 (ВУ).
Для расширения функциональных возможностей меточного датчика аэродинамического угла и истинной воздушной скорости и обеспечения измерения других высотно-скоростных параметров, определяющих движение летательного аппарата относительно определяющей воздушной среды (барометрической высоты Н, температуры TH наружного воздуха на высоте полета Н, плотность воздуха ρH на высоте Н, приборной скорости Vпр, числа Маха М и других связанных с ними параметров) генератор ионных меток ГМ выполнен в виде генератора пилообразного напряжения, подаваемого на искровой разрядник 2. В цепи искрового разрядника включена схема 3 регистрации момента искрового пробоя межэлектродного промежутка искрового разрядника, выход которой подключен к управляющему входу схемы 17 измерения напряжения UПР на выходе генератора пилообразного напряжения в момент пробоя межэлектродного промежутка искрового разрядника 2. Выход схемы 17 подключен ко входу вычислительного устройства ВУ, который по сигналу FГМ задает цикл запуска генератора пилообразного напряжения и частоту генерации ионных меток.
Вычислительное устройство ВУ выполнено в виде вычислителя, реализующего как алгоритмы определения аэродинамического угла и истинной воздушной скорости, так и алгоритмы определения других высотно-скоростных параметров движения летательного аппарата относительно окружающей воздушной среды, в том числе:
1. По измеряемому напряжению UПР на выходе генератора пилообразного напряжения в момент пробоя межэлектродного промежутка искрового разрядника, используя эмпирическую формулу, приведенную в литературе: Райзер Ю.П. Физика газового разрядника: Учебное руководство. - М.: Главная редакция физико-математической литературы. - 1987. - 592 с. - [7]

где UПР - напряжение пробоя, межэлектродного промежутка искрового разрядника; d - расстояние между электродами искрового разрядника; PH - абсолютное давление окружающей воздушной среды, зависящее от высоты Н, при известном значении расстояния d, вычисляется абсолютное давление PH на данной высоте полета Н, например, неявно из соотношения

2. По вычисленному абсолютному статическому давлению PH набегающего воздушного потока в соответствии со стандартными зависимостями, соответствующими ГОСТ 4401-81 (ГОСТ 4401-81. Атмосфера стандартная. Параметры. - М.: Изд-во Стандартов. - 1981. - 179 с. - [8]), абсолютная высота полета в диапазоне [-2000 м<H<11000 м] определяется по формуле

3. Используя ГОСТ 5212-74 (ГОСТ 5212-74. Таблица аэродинамическая. Динамическое давление и температура торможения воздуха для скорости полета от 10 до 4000 км/ч. Параметры. - М.: Изд-во Стандартов. - 1974. - 239 с. - [9]), истинную воздушную скорость VB, измеренную меточным датчиком, можно представить в виде

где g=9,80665 м/с2 - ускорение силы тяжести; РП=РН+Рдин - полное давление набегающего воздушного потока;  - динамическое давление (скоростной напор) набегающего воздушного потока.
- динамическое давление (скоростной напор) набегающего воздушного потока.
4. Подставив в выражение (8) значения параметров VB и PH, измеряемых вихревым датчиком, получим соотношение вида

которое устанавливает неявную, но однозначную связь измеряемой вихревым датчиком истинной воздушной скорости VB с абсолютной температурой TH на высоте Н.
5. Определяя из соотношения (9) абсолютную температуру TH, можно определить плотность воздуха ρH на высоте Н.
Плотность воздуха ρH на высоте Н можно представить (Залманзон Л.А. Проточные элементы пневматических приборов контроля и управления. - М.: Изд-во АН СССР. - 1961. - 249 с. - [10]) как

где ρ0=0,125 кгс2/м4 - массовая плотность воздуха на высоте Н=0.
6. Тогда в соответствии с ГОСТ 5212-74 [9] можно определить (вычислить) приборную скорость полета, т.е. истинную воздушную скорость VB, приведенную к нормальным условиям на уровне H=0, по формуле

8. Число Маха М, характеризующее отношение истинной воздушной скорости VB к скорости звука 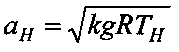 на высоте Н, например для дозвуковых скоростей полета будет определяться уравнением
на высоте Н, например для дозвуковых скоростей полета будет определяться уравнением

Таким образом, измеряя напряжение UПР пробоя межэлектродного промежутка искрового разрядника, определяется абсолютное статическое давление PH окружающей воздушной среды на абсолютной высоте полета Н по зависимости (6) и далее по зависимостям (7)-(12) в вычислителе меточного датчика аэродинамического угла и истинной воздушной скорости определяются все высотно-скоростные параметры движения летательного аппарата относительно окружающей среды, существенно расширяя функциональные возможности меточного датчика аэродинамического угла и истинной воздушной скорости.
Меточный датчик аэродинамического угла и истинной воздушной скорости устанавливается на летательном аппарате таким образом, чтобы базовая ось системы приемных электродов, соответствующая нулевому аэродинамическому углу, совпадала с направлением продольной оси летательного аппарата, а плоскость расположения приемных электродов находилась в плоскости изменения измеряемого аэродинамического угла.
При работе меточного датчика аэродинамического угла и истинной воздушной скорости изменение аэродинамического угла α вызывает отклонение траектории движения генерируемой разрядником 2 в точке 0 ионной метки, обладающей электростатическим зарядом qм. Заряженная ионная метка перемещается совместно с набегающем воздушным потоком пролетает вблизи приемных электродов 3 и наводит (индуцирует) на них электрические заряды, величина которых зависит от расстояния ионной метки до приемного электрода и углового положения α траектории движения ионной метки. С помощью приемных электродов 3 формируются положительные и отрицательные полуволны синусоидальных и косинусоидальных угловых характеристик информативных сигналов U(α) на выходах соответствующих предварительных усилителей БПУ (см. фиг. 3). Выходные сигналы U(α) блока предварительных усилителей 5 (фиг. 3) подаются на входы измерительной схемы 15, в каналах которого формируются сигналы, определяющие рабочий сектор i канала грубого отсчета и точное значение αр измеряемого угла в рабочем секторе, и интервал времени τν пролета ионной меткой расстояния R от точки 0 генерации ионной метки до окружности с приемными электродами 3. Выходные сигналы каналов измерительной схемы поступают на входы вычислительного устройства 9.
В каждом цикле генерации ионной метки с помощью схемы 3 регистрируется момент искрового пробоя межэлектродного промежутка искрового разрядника. На выходе схемы 16 формируется импульсный сигнал, который подается на управляющий вход схемы 17, которая измеряет напряжение UПР на выходе генератора пилообразного напряжения в момент пробоя межэлектродного промежутка искрового разрядника. Измеренное напряжение пробоя UПР подается на вход вычислительного устройства 9.
Вычислительное устройство 9, выполненное в виде вычислителя, реализует алгоритмы определения аэродинамического угла и истинной воздушной скорости, согласно уравнениям (1), (2) и (3) и выдает выходные кодовые сигналы по аэродинамическому углу α и истинной воздушной скорости VB летательного аппарата. Согласно уравнениям (6), (7), (8), (9), (10), (11), (12) вычислитель определяет и выдает кодовые сигналы по барометрической высоте Н, абсолютной температуре наружного воздуха TH на высоте полета Н, плотности воздуха ρH на высоте Н, приборной скорости Vпр, числу Маха М, существенно расширяя функциональные возможности и область применения такого интегрированного многофункционального меточного датчика высотно-скоростных параметров (воздушных сигналов) летательного аппарата.
Таким образом, по сравнению с известными датчиками аэродинамического угла и истинной воздушной скорости меточный датчик аэродинамического угла и истинной воздушной скорости с расширенными функциональными возможностями имеет ряд существенных преимуществ:
1. Обеспечивает одновременное измерение всех высотно-скоростных параметров, определяющих движение летательного аппарата относительно окружающей воздушной среды, т.е. является многофункциональным датчиком воздушных сигналов.
2. Измерение всех высотно-скоростных параметров движения летательного аппарата относительно окружающей воздушной среды осуществляется с помощью одного неподвижного невыступающего приемника потока, неискажающего аэродинамику летательного аппарата и невлияющего на его аэродинамические характеристики.
3. Измерение всех высотно-скоростных параметров, т.е. расширение функциональных возможностей меточного датчика, обеспечивается без существенного усложнения его конструктивной схемы, а следовательно, повышения себестоимости его производства.
4. Получение выходных сигналов меточного датчика по всем высотно-скоростным параметрам летательного аппарата в непосредственно цифровой форме, упрощает их использование в современных системах цифрового отображения информации, системах управления и других технических системах.
Следует отметить, что диапазон рабочих скоростей многофункционального меточного датчика аэродинамического угла и истинной воздушной скорости неограничен дозвуковыми скоростями полета.
Применение многофункционального меточного датчика аэродинамического угла и истинной воздушной скорости на различных классах летательных аппаратах, в частности на самолетах и других летательных аппаратах, в том числе на беспилотных и дистанционно-пилотируемых летательных аппаратах, а также на экранопланах, других транспортных средствах позволяет расширить границу рабочих скоростей, повысить точность измерения высотно-скоростных параметров, улучшить качество пилотирования и эффективность решения тактико-технических задач полета.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕТОЧНЫЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ИСТИННОЙ ВОЗДУШНОЙ СКОРОСТИ | 2014 |
|
RU2580208C1 |
| Система воздушных сигналов вертолета | 2018 |
|
RU2695964C1 |
| БОРТОВАЯ СИСТЕМА ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВЕКТОРА СКОРОСТИ ВЕТРА НА СТОЯНКЕ, СТАРТОВЫХ И ВЗЛЕТНО-ПОСАДОЧНЫХ РЕЖИМАХ ВЕРТОЛЕТА | 2014 |
|
RU2587389C1 |
| Кинематический датчик аэродинамического угла и истинной воздушной скорости | 2019 |
|
RU2737518C1 |
| МЕТОЧНЫЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ВОЗДУШНОЙ СКОРОСТИ | 2010 |
|
RU2445634C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КИНЕМАТИЧЕСКИХ ПАРАМЕТРОВ ВОЗДУШНОГО ПОТОКА | 1982 |
|
SU1048922A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ВОЗДУШНОГО ПОТОКА | 1982 |
|
SU1190731A1 |
| СИСТЕМА ИЗМЕРЕНИЯ ВЫСОТНО-СКОРОСТНЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2477862C1 |
| ДАТЧИК АЭРОДИНАМИЧЕСКИХ УГЛОВ | 1981 |
|
SU1080613A1 |
| ВИХРЕВОЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ИСТИННОЙ ВОЗДУШНОЙ СКОРОСТИ | 2014 |
|
RU2556760C1 |


Изобретение относится к устройствам для измерения величины (модуля) и угла направления (аэродинамического угла) вектора истинной воздушной скорости, а также других высотно-скоростных параметров летательного аппарата (ЛА), определяющих движение ЛА относительно окружающей воздушной среды. Технический результат - расширение функциональных возможностей. Предложенное устройство содержит генератор ионных меток, канал регистрации ионных меток в виде системы приемных электродов, расположенных по окружности с центром в точке генерации ионных меток, и блока предварительных усилителей, измерительную схему в виде канала определения рабочего сектора, являющегося каналом грубого отсчета, канала точного измерения угла в рабочем секторе и канала истинной воздушной скорости, подключенных ко входу вычислительного устройства, выходы которого являются цифровыми выходами по аэродинамическому углу и истинной воздушной скорости. 4 ил.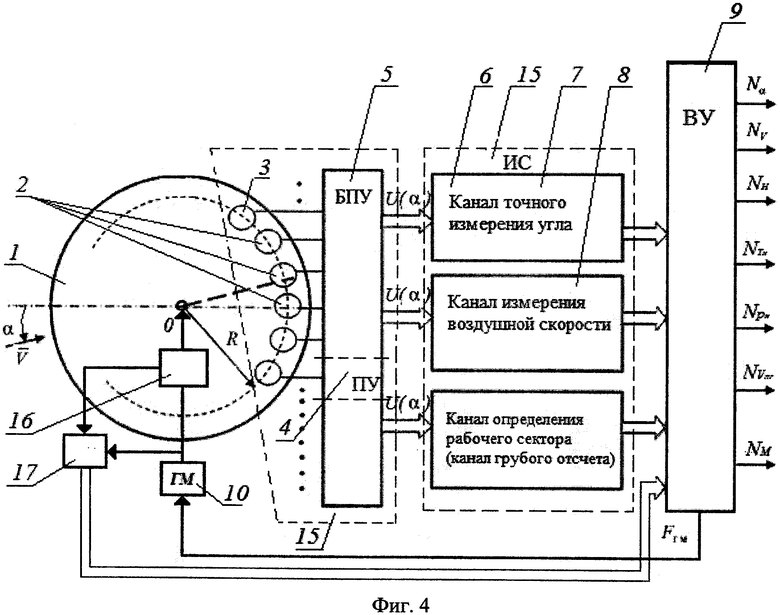
Меточный датчик аэродинамического угла и истинной воздушной скорости летательного аппарата, содержащий генератор ионных меток, канал регистрации ионных меток в виде системы приемных электродов, расположенных по окружности с центром в точке генерации ионных меток, и блока предварительных усилителей, измерительную схему в виде канала определения рабочего сектора, являющегося каналом грубого отсчета, канала точного измерения угла в рабочем секторе и канала истинной воздушной скорости, подключенных ко входу вычислительного устройства, выходы которого являются цифровыми выходами по аэродинамическому углу и истинной воздушной скорости, отличающийся тем, что генератор ионных меток выполнен в виде генератора пилообразного напряжения, подаваемого на искровой разрядник, в цепь разряда которого включена схема регистрации момента искрового пробоя межэлектродного промежутка искрового разрядника, выход которой подключен к управляющему входу схемы измерения напряжения на выходе генератора пилообразного напряжения в момент пробоя межэлектродного промежутка искрового разрядника, при этом выход схемы измерения напряжения на выходе генератора пилообразного напряжения в момент пробоя межэлектродного промежутка искрового разрядника подключен ко входу вычислительного устройства, которое выполнено в виде вычислителя, реализующего как алгоритмы определения аэродинамического угла и истинной воздушной скорости, так и алгоритмы определения других высотно-скоростных параметров, определяющих движение летательного аппарата относительно окружающей воздушной среды - барометрической высоты, температуры наружного воздуха, плотности воздуха на данной высоте полета, приборной скорости и числа Маха, согласно уравнениям


где i - номер рабочего сектора грубого канала, в котором находится ионная метка; αo - угол, охватывающий рабочий сектор грубого канала отсчета аэродинамического угла (при 
| МЕТОЧНЫЙ ДАТЧИК АЭРОДИНАМИЧЕСКОГО УГЛА И ВОЗДУШНОЙ СКОРОСТИ | 2010 |
|
RU2445634C2 |
| Меточный датчик вертикальной скорости | 1986 |
|
SU1469469A1 |
| Браславский Д.А | |||
| и др | |||
| Авиационные приборы и автоматы | |||
| М.: Машиностроение, 1978, с | |||
| Способ добывания бензина и иных продуктов из нефти, нефтяных остатков и пр. | 0 |
|
SU211A1 |
| СПОСОБ ГРАДУИРОВКИ ДАТЧИКА АЭРОДИНАМИЧЕСКОГО УГЛА ЛЕТАТЕЛЬНОГО АППАРАТА | 2004 |
|
RU2277698C1 |
| Пашковский И.М., Леонов В.А., Поплавский Б.К | |||
| Летные испытания самолетов и обработка результатов испытаний | |||
| - М.: Машиностроение, 1985, с.151-152. | |||

