[1] Настоящее изобретение относится к продольному фиксирующему устройству для груза в летательном аппарате, в частности используемому в последовательности сбрасывания груза с самолета и логистических грузоперевозках, и к предохранительному спусковому механизму для продольного фиксирующего устройства, который механически освобождает продольное фиксирующее устройство, когда достигается определенное усилие, и выявляется невозможность сбрасывания груза.
ОПИСАНИЕ УРОВНЯ ТЕХНИКИ
[2] Некоторые замки с продольным удерживанием, используемые в системах сбрасывания груза на паллете и логистических грузоперевозках, основаны на принципе чисто механического освобождения, когда подвержены действию усилия со стороны платформы для сбрасывания, вытягиваемой посредством вытяжного парашюта. Под замком с механическим освобождением понимается удерживающая система, которая на основе определенного заданного смещения защелки замка, соответствующего освобождающему усилию, разблокирует груз без внешнего воздействия по команде. Механический компонент, который связывает смещение с усилием, является пружиной, таким образом замки с продольным удерживанием имеют внутреннюю пружину, которая приводится в действие, когда защелка замка смещается.
[3] Освобождающее усилие замка может быть отрегулировано вручную или удаленно посредством электромеханической системы, как описано в документе US20120126058, или посредством системы троса тянуще-толкающего типа, описанной в документе US4379535, либо посредством изменения предварительного натяжения внутренней пружины или посредством изменения соотношения механической передачи между защелкой замка и смещением пружины соответственно.
[4] В зависимости от состояния сохранности платформы, допусков на изготовление и сборку, сохранности замковой системы и, наконец, отклонений летательного аппарата во время процесса сброса, иногда происходит преждевременное освобождение сбрасываемого груза. Факторы, приведенные ранее, приводят к неравномерной нагрузке на замки, которые удерживают платформу для сбрасывания. Эта неравномерность нагрузки приводит к эффекту последовательного освобождения замков и, следовательно, платформы для сбрасывания до приложения вытяжным парашютом заданного усилия для освобождения набора замков или, когда грузовые коэффициенты (загрузки) во время полета образуют инертные грузы на платформах, которые действуют неравномерно в замках. Усилие, при помощи которого набор замков освобождается, установлен по отдельности в замках для сбрасывания. Когда усилие от вытяжного парашюта превышает сумму отдельных усилий в каждом замке, замки механически освобождают платформу для сбрасывания с грузом. Преждевременное освобождение груза может возникать, когда платформа подвержена действию грузовых коэффициентов (загрузки) во время полета или, когда вытяжной парашют выбрасывается, создавая мгновенное усилие при покидании своего контейнера. Последствиями преждевременного освобождения груза являются снижение/потеря устойчивости летательного аппарата вследствие дрейфа центра тяжести груза и снижение точности и правильности пункта доставки груза.
[5] Для обеспечения равномерности нагрузки на замки во время сброса, документ US4379535 описывает гидравлическую систему предварительного выравнивания груза. Недостатками этой системы является дополнительный вес летательного аппарата, поскольку она требует добавление сети гидравлических труб, которые соединяют замки системы, и габариты, занимающие пол летательного аппарата.
[6] Документ EP0771726 описывает узел замков на прогрессивном упругом основании (уретановый эластомер) для улучшения распределения грузов по замкам. Однако упругое основание позволяет грузу слегка перемещаться во время логистической транспортировки, когда он подвержен действию грузовых коэффициентам (загрузки) во время полета. Этот же документ предлагает систему измерения усилия под защелкой замка и электромеханическую разблокировку груза на основе заданного значения усилия. Эта электромеханическая система измерения и разблокировки предотвращает преждевременное освобождение груза во время сброса, поскольку разблокировка защелки зависит от внешнего воздействия по команде (электромеханического привода). Однако простой выход из строя электромеханического привода одного из замков в наборе, который удерживает платформу во время сброса, может потенциально привести к катастрофическому событию. Это является следствием того, что при регистрации открытия вытяжного парашюта и вытягивания грузовой платформы, система освободит все замки набора, но простой выход из строя одного из их, приведет к удерживанию грузовой платформы внутри летательного аппарата. Соответственно, летательный аппарат будет самостоятельно тянуть вытяжной парашют, в результате чего создавая чрезмерное торможение, и в свою очередь будет уменьшаться скорость и потенциально возникать сваливание летательного аппарата.
ЗАДАЧИ ИЗОБРЕТЕНИЯ
[7] Задача настоящего изобретения состоит в обеспечении продольного фиксирующего устройства для груза в летательном аппарате, используемого в последовательности сбрасывания груза и логистических грузоперевозках, причем продольное фиксирующее устройство имеет три рабочих положения: зафиксированное, включенное и освобожденное, и четырехштанговый механизм, который способствует освобождению груза без риска фиксации.
[8] Еще одна задача этого изобретения состоит в обеспечении предохранительного спускового механизма для продольного фиксирующего устройства, который механически освобождает продольное фиксирующее устройство, когда достигается определенное усилие и выявляется невозможность сбрасывания груза, поскольку продольное фиксирующее устройство не расфиксируется.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[9] Задача настоящего изобретения состоит в продольном фиксирующем устройстве для груза в летательном аппарате, снабженным фиксирующим блоком, который прикреплен под полом летательного аппарата, причем продольное фиксирующее устройство для груза в летательном аппарате содержит фиксирующую защелку, связанную с грузом и соединенную со штанговым механизмом, расположенным внутри фиксирующего блока, причем фиксирующая защелка перемещается по направлению к сбрасыванию груза во время полета; причем штанговой механизм образован фиксирующим блоком, действуя в качестве неподвижной штанги, ведомым рычагом, шарнирно соединенным со вторым шарниром, и ведомым толкателем, шарнирно соединенным с первым шарниром, оба шарнира прикреплены к фиксирующему блоку; причем упомянутые шарнирные соединения перемещают штанговой механизм, определяя зафиксированное, включенное и освобожденное положения устройства.
[10] Дополнительная задача этого изобретения состоит в предохранительном спусковом механизме для продольного фиксирующего устройства, расположенном внутри фиксирующего блока и содержащим балансир, снабженный контактной поверхностью и выполненный с возможность поворота на четвертом шарнире, причем упомянутый балансир связан с концом второй штанги сжатия и концом выполненного с возможностью регулирования стержня, который сообщается с картриджем цилиндрической пружины сжатия, контактная поверхность смещает вторую штангу сжатия под действием продольного усилия, приложенного к фиксирующей защелке и превышающего предварительно установленное продольное усилие.
ОБОБЩЕННОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[11] Теперь настоящее изобретение будет описано более подробно на основе примера выполнения, представленного на чертежах. На чертежах:
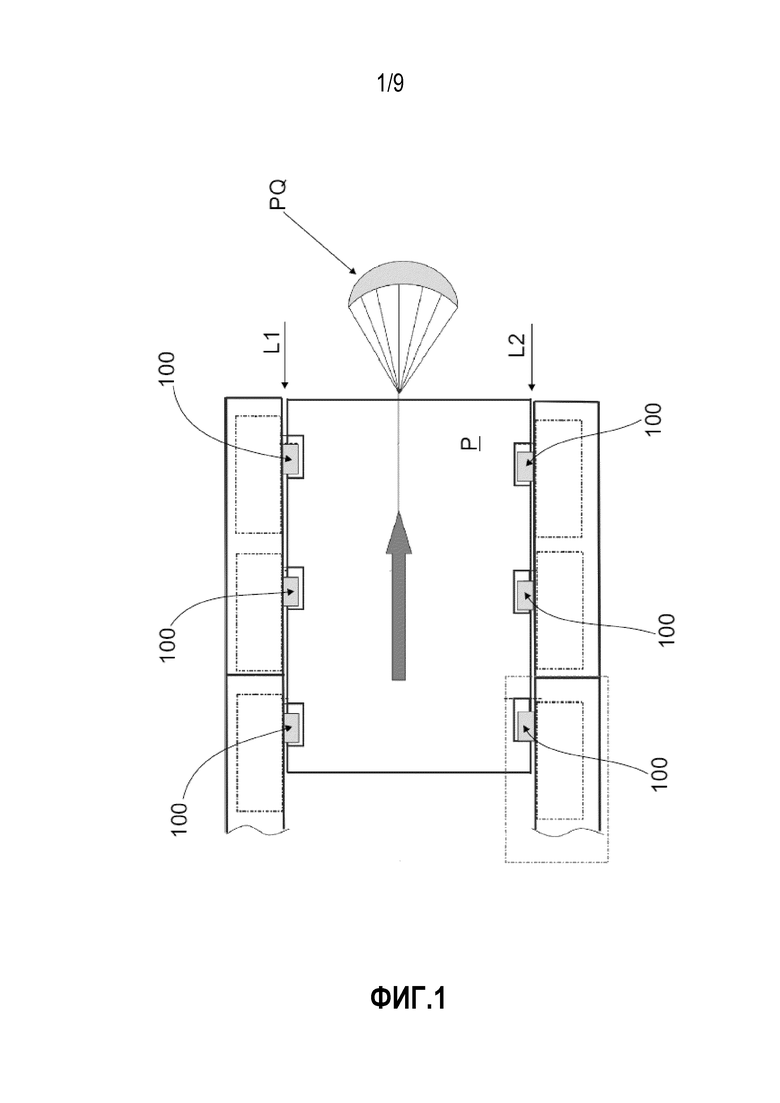
[12] Фигура 1 - схематичный вид продольного удерживания, обеспеченного множеством продольных фиксирующих устройств для груза в летательном аппарате, встроенных в процедуры обращения с и сбрасывания груза во время полета;
[13] Фигура 2 - вид сверху продольного фиксирующего устройства для груза в летательном аппарате, продольно удерживающего паллету с грузом;
[14] Фигуры 3a, 3b и 3c - схематичные виды сверху внутренних конструкций продольного фиксирующего устройства для груза в летательном аппарате в зафиксированном, включенном и освобожденном положениях;
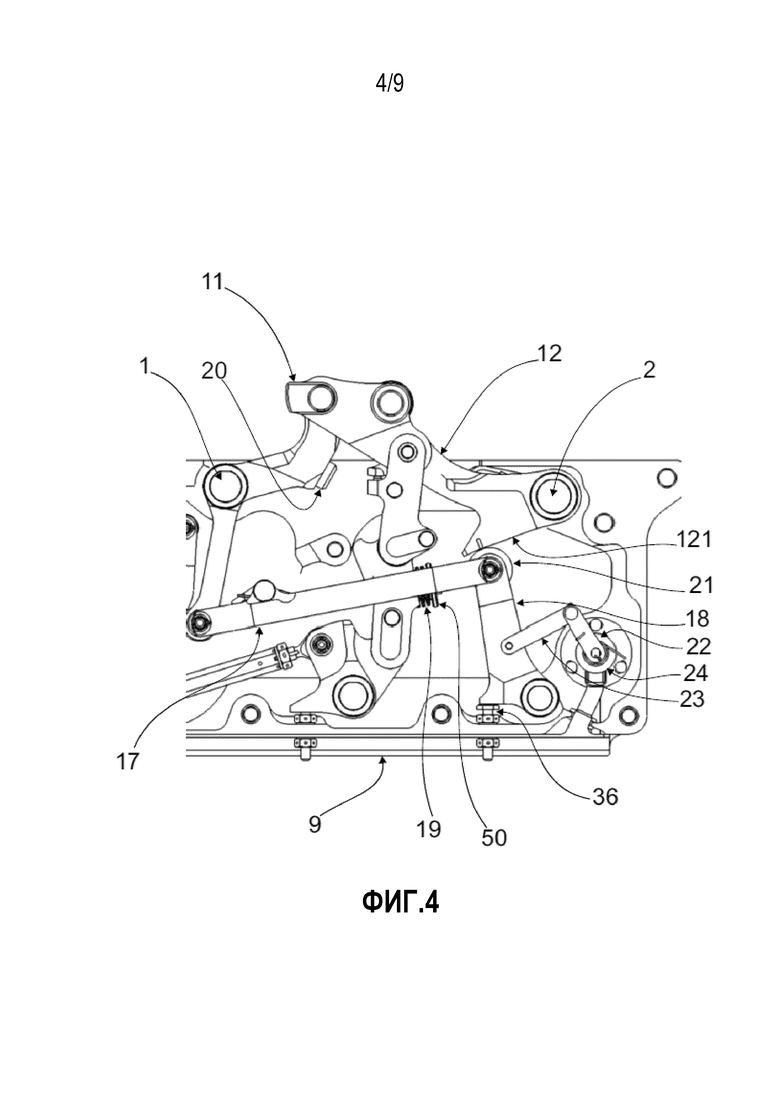
[15] Фигура 4 - первый схематичный вид сверху с подробностями внутренней конструкции продольного фиксирующего устройства для груза в летательном аппарате в зафиксированном положении;
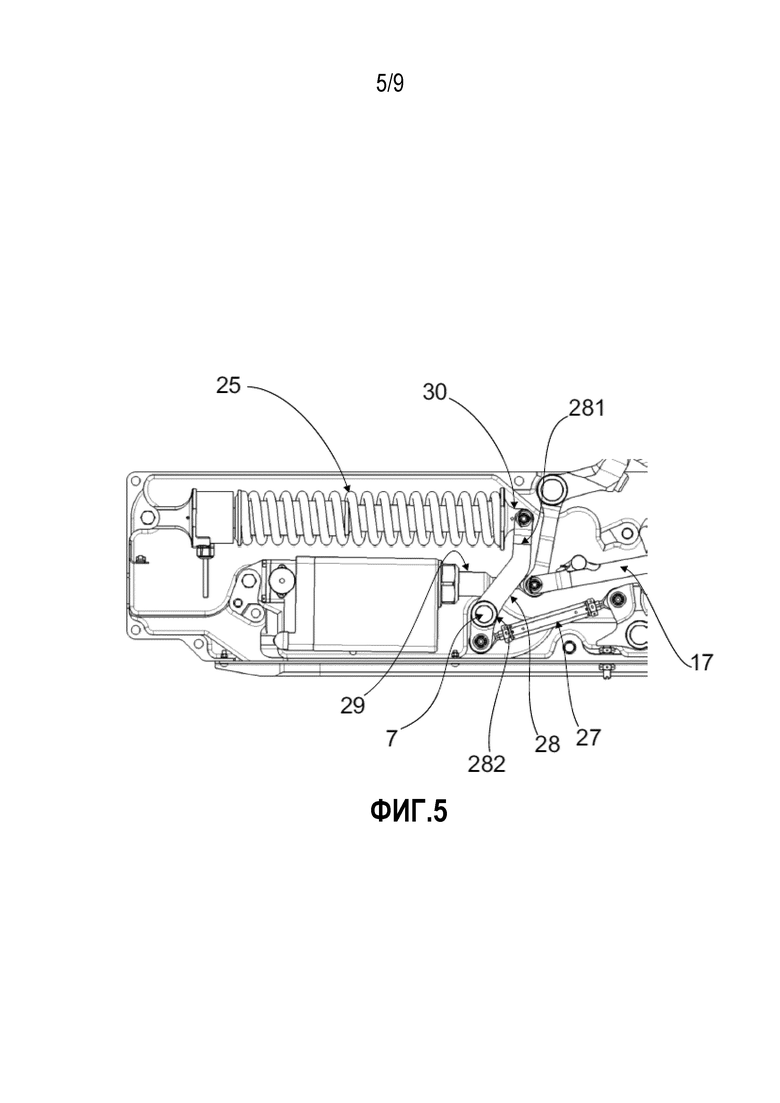
[16] Фигура 5 - второй схематичный вид сверху с подробностями внутренней конструкции продольного фиксирующего устройства для груза в летательном аппарате в зафиксированном положении;
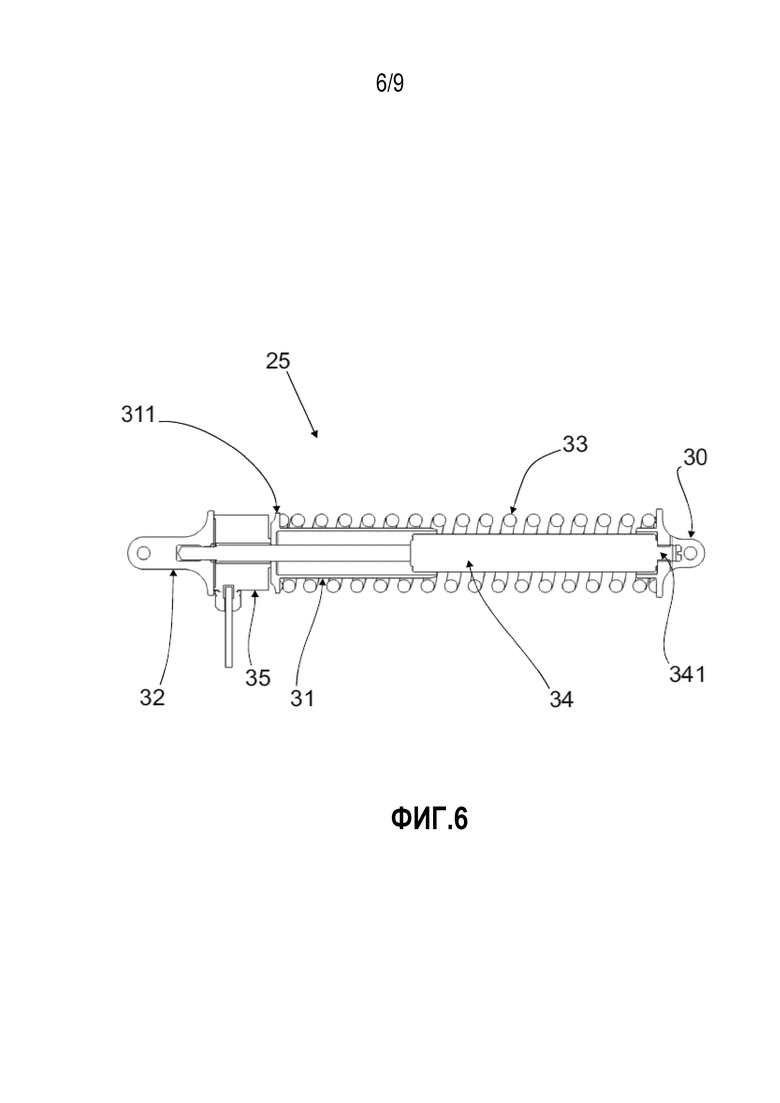
[17] Фигура 6 - схематичный вид в сечении с подробностями картриджа пружины, содержащегося в продольном фиксирующем устройстве для груза в летательном аппарате;
[18] Фигуры 7a и 7b - вид сверху локальных подробностей внутренней конструкции продольного фиксирующего устройства для груза в летательном аппарате во включенном и освобожденном положениях;
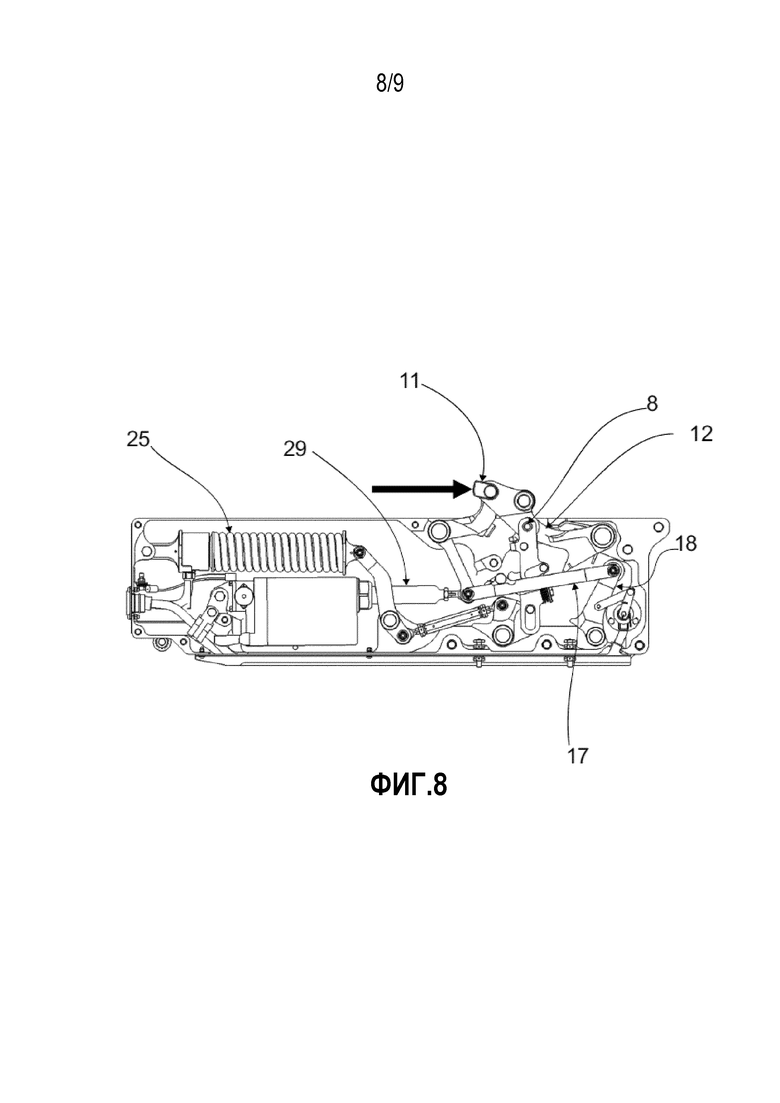
[19] Фигура 8 - общий вид сверху в сечении внутренней конструкции продольного фиксирующего устройства для груза в летательном аппарате во включенном положении, когда продольное усилие под фиксирующей защелкой достигает точки механического освобождения посредством предохранительного спускового механизма для продольного фиксирующего устройства, которое является задачей этого изобретения; и
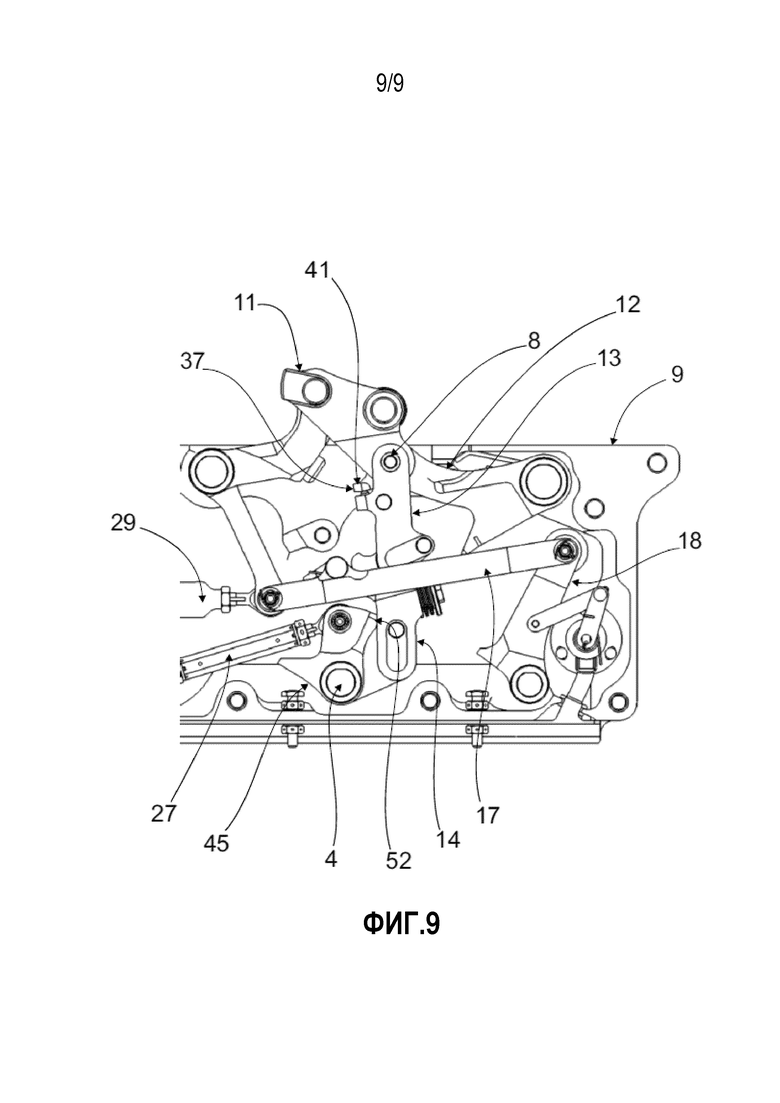
[20] Фигура 9 - вид сверху локальных подробностей внутренней конструкции продольного фиксирующего устройства для груза в летательном аппарате в момент приближения к механическому освобождению фиксирующей защелки посредством предохранительного спускового механизма для продольного фиксирующего устройства.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[21] Согласно предпочтительному варианту выполнения и как можно видеть на чертежах, настоящее изобретение относится к продольному фиксирующему устройству 100 для груза в летательном аппарате, предпочтительно в грузовом летательном аппарате.
[22] Как изображено на фигуре 1, грузовой летательный аппарат содержит платформу P, где расположены грузы, обычно на паллетах. Эти грузы закреплены продольно на платформе P до тех пор, пока не наступит время для их сброса во время полета, обычно посредством выпуска парашюта PQ.
[23] До тех пор, пока не наступит время для их сброса, грузы на платформе грузового летательного аппарата продольно закреплены посредством множества продольных фиксирующих устройств 100 для груза в летательном аппарате, являющихся задачей настоящего изобретения, предпочтительно расположенных встроенными в пол платформы P и рядом с продольными сторонами L1 и L2 платформы P.
[24] Фигура 2 изображает продольное фиксирующее устройство 100 для груза в летательном аппарате, расположенное так, чтобы фиксировать груз посредством взаимодействия фиксирующей защелки 11 с паллетой PL, на которой расположен груз. Конкретно, фиксирующий блок 9 продольного фиксирующего устройства 100 закреплен под полом грузового летательного аппарата и имеет функцию удерживания и продольного освобождения грузов на паллетах. Пол скрыт (не показан), являясь боковой и вертикальной направляющей для паллеты PL и, фиксирующий блок 9 встроен в него. Этот фиксирующий блок 9 может быть установлен с обеих сторон летательного аппарата симметрично вдоль платформы P, в количестве, которое может изменяться от одной пары до множества пар, расположенных симметрично.
[25] Продольное фиксирующее устройство 100 для груза в летательном аппарате, которое является задачей этого изобретения, содержит фиксирующую защелку 11, связанную с грузом и соединенную со штанговым механизмом, расположенным внутри фиксирующего блока 9. Фиксирующая защелка 11 перемещается по направлению к сбрасыванию груза во время полета.
[26] Фиксирующая защелка 11 выполняет функцию соединительной штанги к штанговому механизму. Штанговый механизм, в свою очередь, образован фиксирующим блоком 9, действуя в качестве неподвижной штанги, ведомым шарнирным рычагом 12 и поворачивающимся на втором шарнире 2, и ведомым шарнирным толкателем 10 и поворачивающимся на первом шарнире 1. На противоположных первому и второму шарнирам 1, 2 концах, ведомый рычаг 12 и ведомый толкатель 10 соединены с фиксирующей защелкой 11 или соединительной штангой, замыкающим цепь штанг. Оба шарнира 1, 2 прикреплены к фиксирующему блоку 9, и шарнирные соединения перемещают штанговый механизм, определяя зафиксированное, включенное и освобожденное положения для устройства 100, как изображено на фигурах 3a, 3b и 3c.
[27] В зафиксированном положении (фигура 3a), которое будет описано подробно далее, штанговый механизм достигает положения, где угол между фиксирующей защелкой 11 и ведомым рычагом 12 составляет всего на несколько градусов меньше 180 градусов. Это положение имеет достаточно эффективную траекторию груза для отклика на фиксирующие усилия, поскольку его конфигурация аналогична треугольной решетке с ее вершинами, расположенными на первом и втором шарнирах 1, 2 и на пятом шарнире 5 фиксирующей защелки 11 и ведомого толкателя 10. Дополнительно, положение этой конструкции обеспечивает сильное механическое устранение упругой ограничивающей системы во включенном режим (фигура 3b). Еще одним признаком штангового механизма является то, что перемещение фиксирующей защелки 11 во время освобождения груза всегда направлено к сбрасыванию груза во время полета, для того чтобы предотвратить любой тип застревания груза на паллете во время освобождения. Таким образом, когда вытяжной парашют PQ вытягивает груз из летательного аппарата, и замок переводится в освобождающее положение (фигура 3c), груз противодействует защелке 11 в обратном направлении до тех пор, пока она полностью не освободит прохождение вытягивающей платформы.
[28] Как можно видеть подробно на фигуре 4, ведомый рычаг 12 содержит криволинейный профиль 121 на его поверхности, упомянутый криволинейный профиль 121 взаимодействует с ведомым роликом 18, который соединен с электромеханическим линейным приводом 29 (фигура 5) посредством приводного стержня 17 (фигуры 4 и 5). Прямолинейное перемещение электромеханического линейного привода 29 перемещает ведомый ролик 18, определяя зафиксированное, включенное и освобожденное положения фиксирующего устройства 100.
ЗАФИКСИРОВАННОЕ ПОЛОЖЕНИЕ
[29] В зафиксированном положении, изображенном на фигуре 3a и на фигуре 4, область 21 контакта ведомого ролика 18 удерживается взаимодействующей с криволинейным профилем 121 ведомого рычага 12 посредством усилия контакта.
[30] Более конкретно, стержень электромеханического линейного привода 29 отводится, и ведомый ролик 18 касается области криволинейного профиля 121 ведомого рычага 12 вблизи его конца. Область 21 контакта ведомого ролика 18 обеспечивает нереверсивную фиксацию штангового механизма фиксирующей защелки 11. Эта нереверсивность обеспечена усилием контакта между криволинейным профилем 121 и областью 21 контакта, которое не поворачивает ведомый ролик 18 для освобождения положения механизма, в направлении по часовой стрелке, когда направленное обратно продольное усилие действует на фиксирующую защелку 11.
[31] Ведомый ролик 18 удерживается в этом положении посредством механического соединения линейного привода 29 и также посредством спиральной торсионной пружины 39, взаимодействующей с ведомым роликом 18. Спиральная торсионная пружина 39 удерживает ведомый ролик 18 прижатым к ограничителю 36 перемещений, расположенному на фиксирующем блоке 9, вблизи конца ведомого ролика 18, противоположно области 21 контакта.
[32] Ведомый ролик 18, спиральная торсионная пружина 39 и ограничитель 36 перемещений составляют ограничивающее средство фиксирующего устройства 100, поскольку оно поддерживает стабильность положения фиксирующей защелки 11, в то время как выбрано зафиксированное положение устройства 100, даже при неблагоприятных условиях работы.
[33] Когда продольное усилие действует на фиксирующую защелку 11 в направлении, противоположном направлению сбрасывания груза (фигура 7a), ограничивающий рычаг 51 ведомого рычага 12 прижимается к неподвижному ограничителю 45 фиксирующего блока 9, ограничивая степень свободы штангового механизма в направлении по часовой стрелке этого ведомого рычага 12. Это состояние наибольшей нагрузки на устройство 100, поскольку оно удерживает массу груза на паллете, умноженную на коэффициент перемещаемого вперед груза во время аварийной посадки летательного аппарата, например. В этом состоянии криволинейный профиль 121 ведомого рычага 12 немедленно выходит из контакта с ведомым роликом 18.
ВКЛЮЧЕННОЕ ПОЛОЖЕНИЕ
[34] Фигуры 3b, 8 и 9 изображают продольное фиксирующее устройство 100 для груза в летательном аппарате во включенном положении.
[35] В этом включенном положении, электромеханический линейный привод 29 выдвинут в промежуточное положение, заставляя приводной стержень 17 поворачивать ведомый ролик 18 в направлении по часовой стрелке.
[36] Это перемещение освобождает ведомый рычаг 12 ограничивающего средства фиксирующего устройства 100, позволяя ведомому рычагу 12 поворачиваться в положение в направлении против часовой стрелки, когда направленному в обратном направлении продольному усилию противодействует фиксирующая защелка 11. Предпочтительно, это перемещение электромеханического линейного привода 29 во включенное положение освобождает ведомый рычаг 12 из контакта с ведомым роликом 18.
[37] Третий шарнир 8 расположен на фиксирующем блоке 9, между фиксирующей защелкой 11 и ведомым рычагом 12. Этот третий шарнир 8 соединен с картриджем 25 спиральной пружины сжатия посредством набора стержней.
[38] Когда третий шарнир 8 перемещается внутрь фиксирующего блока 9, набор стержней сжимает картридж 25 спиральной пружины, создавая сопротивление этому перемещению. Это состояние позволяет фиксирующей защелке 11 иметь продольное отклонение от увеличивающегося отклоняющего усилия отвода.
[39] Как можно видеть на фигуре 6, картридж 25 спиральной пружины сжатия содержит гидравлический амортизатор 34, соединенный соосно с фланцевой направляющей 31, подвижный разъем 30, соединенный с первым концом 341 гидравлического амортизатора 34, пружину 33, которая охватывает снаружи гидравлический амортизатор 34 и фланцевую направляющую 31, и датчик 35 груза, расположенный соединенным соосно с фланцевым концом 311 фланцевой направляющей 31 и с неподвижным разъемом 32, прикрепленным к фиксирующему блоку 9.
[40] Сжатие спиральной пружины в картридже 25 создается поворотом рычага 28 пружины в направлении против часовой стрелки, когда он вытягивается регулируемым стержнем 27 набора стержней, как изображено на фигуре 5. Рычаг 28 пружины содержит первый конец 281, присоединенный к подвижному разъему 30 картриджа 25 спиральной пружины сжатия, и второй конец 282, присоединенный к четвертому шарниру 7, прикрепленному к фиксирующему блоку 9.
[41] Фланцевая направляющая 31 центрирует пружину 33 посредством прямолинейного перемещения гидравлического амортизатора 34 внутрь фланцевой направляющей 31 и наружу из фланцевой направляющей 31. Соответственно, фланцевая направляющая 31 передает сжимающее усилие пружины 33 на датчик 35 груза, который, в свою очередь, передает данные о сжатии пружины 33 в блок управления, который передает эти данные о сжатии пружины 33 на центральный компьютер (не изображен).
[42] Центральный компьютер, посредством теоретической зависимости, соотносит данные о сжатии пружины 33 с продольным усилием, приложенным к фиксирующей защелке 11. На основе массива данных, центральный компьютер принимает решение об освобождении груза, когда сумма достигает заданного значения.
[43] Затем каждый замок переводится из включенного положения в освобожденное положение посредством выдвигания стержня линейного привода 29.
ОСВОБОЖДЕННОЕ ПОЛОЖЕНИЕ
[44] Когда электромеханический линейный привод 29 выдвигается из промежуточного положения в конечное положение, приводной стержень 17 перемещается по штанговому механизму, поворачивая ведомый ролик 18 в освобожденное положение фиксирующего устройства 100.
[45] Как можно видеть на фигурах 3c и 7b, в освобожденном положении фиксирующая защелка 11 полностью отведена в фиксирующий блок 9, освобождая груз на паллете.
[46] Продольное фиксирующее устройство 100 для груза в летательном аппарате дополнительно содержит нейтральную систему, которая состоит из первой штанги 13 сжатия, по существу выравненной со второй штангой 14 сжатия, и которая толкает штанговой механизм устройства 100, сжимая картридж 25 спиральной пружины сжатия (фигура 9).
[47] Первая штанга 13 сжатия взаимодействует с третьим шарниром 8 и содержит выполненный с возможностью регулирования винт 37, совместно соприкасающийся с ограничителем 41 ведомого рычага 12, предотвращая поворот штанги 13 сжатия в направлении по часовой стрелке и, следовательно, предотвращая складывание в этом направлении и поддерживая неизменным нейтральное положение.
[48] Как изображено на фигурах 7a и 7b, приводной стержень 17 содержит прекурсор 40, который смещает вторую штангу 14 сжатия, когда приводной стержень 17 перемещается посредством выдвигания электромеханического линейного привода 29. Смещение второй штанги 14 сжатия является результатом сжимающего усилия, которое переводит первую и вторую штанги 13, 14 сжатия в сжатое состояние и создает момент в третьем шарнире 8, заставляя выполненный с возможностью регулирования винт 37 выходить из контакта с ограничителем 41 ведомого рычага 12, приводя к складыванию нейтрального положения.
[49] Дополнительно, смещение второй штанги 14 сжатия и момент в третьем шарнире 8 создают поворот первой штанги 13 сжатия в направлении против часовой стрелки, и фиксирующая защелка 11 полностью отводится в фиксирующий блок 9.
[50] Спиральная торсионная пружина 44 взаимодействует со вторым шарниром 2 и помогает отведению фиксирующей защелки 11 внутрь фиксирующего блока 9.
[51] Штанговой механизм фиксирующей защелки 11 достигает своего полностью отведенного положения, когда ведомый толкатель 10 соприкасается с фиксирующим блоком 9. Это положение удерживается посредством действия торсионной пружины 44 и также посредством перекрытия прекурсора 40 под ограничителем ведомого рычага 12, ограничивая его перемещение по часовой стрелке.
[52] Одновременно со складывающим перемещением штанговой системы, усилие сжатия, передаваемое на пружинные картриджи, резко снимается. Следовательно, пружина 33 сжатия разжимается, освобождая потенциальную энергию упругой деформации, хранящуюся в ней. Эта энергия рассеивается посредством гидравлического амортизатора 34, который демпфирует скорость разжатия пружины посредством пропускания гидравлической текучей среды через калиброванное отверстие. Это ньютоновское демпфирование возникает только при выдвигании амортизатора 34, когда пружина 33 разжимается.
[53] Простой выход из строя линейного привода 29 одного из продольных фиксирующих устройств 100, которые продольно удерживают вытягивающую платформу для груза, приведет к удерживанию платформы для груза внутри летательного аппарата.
[54] В этой ситуации, летательный аппарат будет самостоятельно тянуть вытяжной парашют, в результате чего создавая чрезмерное торможение, и в свою очередь будет уменьшаться скорость и потенциально возникать сваливание летательного аппарата.
[55] Чтобы исключить эту последовательность событий, продольное фиксирующее устройство 100, во включенном положении, освобождает штанговой механизм фиксирующей защелки 11 на основе обнаружения продольного усилия, установленного заранее и не превышающего усилие вытягивания груза.
[56] Этот показатель безопасности состоит из предохранительного спускового механизма для продольного фиксирующего устройства 100, также являющегося задачей настоящего изобретения, который, как указано, механически освобождает продольное фиксирующее устройство 100, когда достигается определенное усилие, и выявляется невозможность сбрасывания груза вследствие невозможности расфиксации продольного фиксирующего устройства 100. Предпочтительно, устройство 100 механически освобождает фиксирующую защелку 11 во включенном режиме на основе продольного усилия между 4000 и 4400 фунтами, более конкретно на основе продольного усилия отвода около 4350 фунтов, позволяя грузу перемещаться наружу летательного аппарата без продольного удерживания. Это продольное усилие меньше вытягивающего усилия парашюта, таким образом груз не удерживается внутри летательного аппарата, поскольку неисправный замок механически освобождает платформу, когда усилие парашюта полностью достигается таким образом.
[57] Согласно фигуре 9, предохранительный спусковой механизм расположен внутри фиксирующего блока 9 и содержит коромысло 45, снабженное контактной поверхностью 52 и выполненное с возможность поворота на шестом шарнире 4. Это коромысло 45 взаимодействует с концом второй штанги 14 сжатия и с концом регулируемого стержня 27, который взаимодействует с картриджем 25 спиральной пружины сжатия.
[58] Когда продольное усилие, приложенное к фиксирующей защелке 11, превышает предварительно установленное продольное усилие, фиксирующая защелка 11 отклоняет штанговой механизм на заданное значение. Контактная поверхность 52 тогда соприкасается со второй штангой 14 сжатия и смещает эту вторую штангу 14 сжатия, толкая ее по направлению к складыванию.
[59] При складывании нейтрального положения, фиксирующее устройство 100 механически переводится в освобожденное положение, то есть, фиксирующая защелка 11 отводится в фиксирующий блок 9 и груз освобождается. Резина 20 демпфирует воздействие фиксирующей защелки 11 под фиксирующим блоком 9.
[60] Когда фиксирующее устройство 100 переводится обратно в зафиксированное положение, стержень линейного привода 29 отводится, освобождая ограничитель 41 ведомого рычага 12 прекурсора 40, и одновременно поворачивает ведомый ролик 18 в направлении против часовой стрелки. Ведомый ролик 18 направляет ведомый рычаг 12 по криволинейному профилю 121 до зафиксированного положения, где удерживающее средство удерживает штанговой механизм фиксирующей защелки 11 в нереверсивном фиксирующем положении. Первая и вторая штанги 13 и 14 сжатия возвращаются в нейтральное положение посредством перемещения ведомого рычага 12, и контакт между выполненным с возможностью регулирования винтом 37 и ограничителем 41 этого ведомого рычага 12 возобновляется посредством давления на поверхность приводного стержня 17 под поверхностью 50 упругого ограничителя 19 нижней штанги 14 сжатия. Упругий ограничитель 19 состоит из набора пружин Бельвилля, которые обеспечивают постоянное возвращающее усилие из точки отверстия штанг 13 и 14, в то время как они находятся в зафиксированном положении.
[61] Фиксирующий блок 9 имеет контрольную систему из дискретных датчиков и датчиков непрерывного действия, расположенных внутри блока 9. Поворотный датчик на эффекте Холла 24 (фигура 6) отслеживает угловое положение удерживающего средства замка посредством механического соединения 22, 23 и обеспечивает информацию специальному блоку управления.
[62] Описав предпочтительный вариант выполнения, ясно, что объем настоящего изобретения охватывает другие возможные изменения, ограниченные только содержанием сопровождающих пунктов формулы изобретения, возможных эквивалентов, включенных в них.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО СО СМЕННЫМ КУЗОВОМ ДЛЯ ПЕРЕВОЗКИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ ГРУЗОВ | 2011 |
|
RU2479448C1 |
| УЗЕЛ МОНТАЖА КРЫШКИ ЛЮКА СИСТЕМЫ ТЕРМОСТАТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2158215C1 |
| ДВЕРЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2300483C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УЛАВЛИВАНИЯ ШТАНГ ТОКОПРИЕМНИКОВ ТРОЛЛЕЙБУСА | 2001 |
|
RU2209143C1 |
| ЗАМОК УБРАННОГО ПОЛОЖЕНИЯ ШАССИ | 1992 |
|
RU2076827C1 |
| Тазобедренный шарнирный модуль экзоскелета | 2023 |
|
RU2818620C1 |
| УСТРОЙСТВО ОТДЕЛЕНИЯ ПОЛЕЗНОЙ НАГРУЗКИ | 2015 |
|
RU2648522C2 |
| Продольный конвейер | 1987 |
|
SU1447736A1 |
| Грузозахватное устройство | 1990 |
|
SU1787924A1 |
| Продольный конвейер | 1985 |
|
SU1316954A1 |



Продольное фиксирующее устройство (100) для груза в летательном аппарате, снабженное фиксирующим блоком (9), который прикреплен под полом летательного аппарата, содержит фиксирующую защелку (11), связанную с грузом и соединенную со штанговым механизмом, расположенным внутри фиксирующего блока (9). Фиксирующая защелка (11) перемещается по направлению к выбросу груза во время полета. Штанговый механизм образован фиксирующим блоком (9), действуя в качестве неподвижной штанги, ведомым рычагом (12), шарнирно соединенным со вторым шарниром (2), и ведомым толкателем (10), шарнирно соединенным с первым шарниром (1). Оба шарнира (1, 2) прикреплены к фиксирующему блоку (9). Шарнирные соединения перемещают штанговый механизм, определяя зафиксированное, включенное и освобожденное положения для устройства (100). Ведомый рычаг (12) содержит криволинейный профиль (121) на поверхности. Криволинейный профиль (121) взаимодействует с ведомым роликом (18), соединенным с электромеханическим линейным приводом (29) посредством приводного стержня (17). Охарактеризован также предохранительный спусковой механизм для продольного фиксирующего устройства (100). Группа изобретений направлена на освобождение груза без риска фиксации. 2 н. и 25 з.п. ф-лы, 9 ил.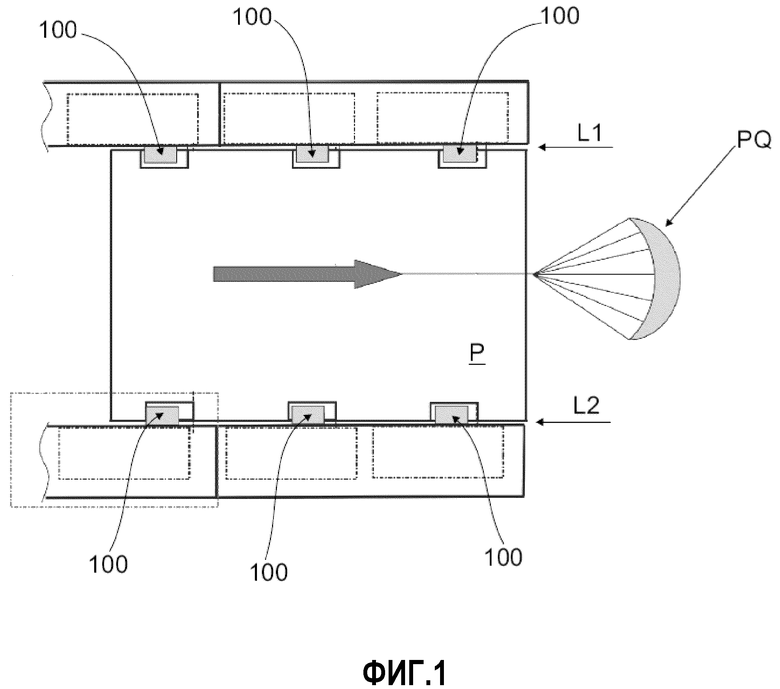
1. Продольное фиксирующее устройство (100) для груза в летательном аппарате, снабженное фиксирующим блоком (9), который прикреплен под полом летательного аппарата, отличающееся тем, что содержит
фиксирующую защелку (11), связанную с грузом и соединенную со штанговым механизмом, расположенным внутри фиксирующего блока (9), причем фиксирующая защелка (11) перемещается по направлению к выбросу груза во время полета;
причем штанговый механизм образован фиксирующим блоком (9), действуя в качестве неподвижной штанги, ведомым рычагом (12), шарнирно соединенным со вторым шарниром (2), и ведомым толкателем (10), шарнирно соединенным с первым шарниром (1), при этом оба шарнира (1, 2) прикреплены к фиксирующему блоку (9); причем упомянутые шарнирные соединения перемещают штанговый механизм, определяя зафиксированное, включенное и освобожденное положения для устройства (100),
причем ведомый рычаг (12) содержит криволинейный профиль (121) на поверхности, при этом упомянутый криволинейный профиль (121) взаимодействует с ведомым роликом (18), соединенным с электромеханическим линейным приводом (29) посредством приводного стержня (17).
2. Устройство по п.1, отличающееся тем, что прямолинейное перемещение электромеханического линейного привода (29) перемещает ведомый ролик (18), определяя зафиксированное, включенное и освобожденное положения для фиксирующего устройства (100).
3. Устройство по п.2, отличающееся тем, что в зафиксированном положении контактная область (21) ведомого ролика (18) удерживается связанной с криволинейным профилем (121) ведомого рычага (12) посредством усилия контакта.
4. Устройство по п.3, отличающееся тем, что содержит торсионную спиральную пружину (39), связанную с ведомым роликом (18), причем упомянутая торсионная спиральная пружина (39) удерживает ведомый ролик (18) опирающимся на ограничитель (36) перемещения, расположенный на фиксирующем блоке (9).
5. Устройство по п.4, отличающееся тем, что усилие контакта и торсионная спиральная пружина (39) предотвращают поворот ведомого ролика (18) во включенное и освобожденное положения.
6. Устройство по п.5, отличающееся тем, что ведомый ролик (18), торсионная спиральная пружина (39) и ограничитель (36) перемещения составляют удерживающее средство замка, которое поддерживает стабильность положения фиксирующей защелки (11).
7. Устройство по п.2, отличающееся тем, что приводной стержень (17) поворачивает ведомый ролик (18) во включенное положение, когда электромеханический линейный привод (29) выдвигается в промежуточное положение.
8. Устройство по п.7, отличающееся тем, что во включенном положении ведомый рычаг (12) не соприкасается с ведомым роликом (18).
9. Устройство по п.8, отличающееся тем, что содержит третий шарнир (8), расположенный на фиксирующем блоке (9) между фиксирующей защелкой (11) и ведомым рычагом (12), причем третий шарнир (8) соединен с картриджем (25) спиральной пружины сжатия посредством набора стержней.
10. Устройство по п.9, отличающееся тем, что картридж (25) спиральной пружины сжатия содержит гидравлический амортизатор (34), соединенный соосно с фланцевой направляющей (31), подвижный разъем (30), соединенный с первым концом (341) гидравлического амортизатора (34), пружину (33), которая охватывает снаружи гидравлический амортизатор (34) и фланцевую направляющую (31), и датчик (35) груза, расположенный связанным соосно с фланцевым концом (311) фланцевой направляющей (31) и с неподвижным разъемом (32).
11. Устройство по п.10, отличающееся тем, что фланцевая направляющая (31) центрирует пружину (33) на основе прямолинейного перемещения гидравлического амортизатора (34) внутрь фланцевой направляющей (31) и наружу из фланцевой направляющей (31).
12. Устройство по п.10, отличающееся тем, что фланцевая направляющая (31) передает сжимающее усилие пружины (33) на датчик (35) груза.
13. Устройство по п.12, отличающееся тем, что датчик (35) груза передает данные о сжатии пружины (33) в блок управления, который передает данные о сжатии пружины (33) на центральный компьютер.
14. Устройство по п.13, отличающееся тем, что центральный компьютер соотносит данные о сжатии пружины (33) с продольным усилием, приложенным к фиксирующей защелке (11), освобождая груз, когда сумма достигает заданного значения.
15. Устройство по п.10, отличающееся тем, что неподвижный разъем (32) прикреплен к фиксирующему блоку (9).
16. Устройство по п.2, отличающееся тем, что приводной стержень (17) поворачивает ведомый ролик (18) в освобожденное положение, когда электромеханический линейный привод (29) выдвигается из промежуточного положения в конечное положение.
17. Устройство по п.16, отличающееся тем, что в освобожденном положении фиксирующая защелка (11) полностью отведена в фиксирующий блок (9).
18. Устройство по пп.9 и 16, отличающееся тем, что содержит первую и вторую штанги (13, 14) сжатия, по существу выравненные, которые толкают штанговый механизм, сжимая картридж (25) спиральной пружины сжатия.
19. Устройство по п.18, отличающееся тем, что первая штанга (13) сжатия связана с третьим шарниром (8) и содержит регулируемый винт (37), совместно соприкасающийся с ограничителем (41) ведомого рычага (12).
20. Устройство по п.19, отличающееся тем, что приводной стержень (17) содержит прекурсор (40), причем упомянутый прекурсор (40) смещает вторую штангу (14) сжатия, когда приводной стержень (17) перемещается посредством выдвигания электромеханического линейного привода (29).
21. Устройство по п.20, отличающееся тем, что смещение второй штанги (14) сжатия создает момент в третьем шарнире (8), и регулируемый винт (37) выходит из контакта с ограничителем (41) ведомого рычага (12).
22. Устройство по п.21, отличающееся тем, что смещение второй штанги (14) сжатия создает поворот первой штанги (13) сжатия в направлении против часовой стрелки, и фиксирующая защелка (11) полностью отводится в фиксирующий блок (9).
23. Устройство по п.22, отличающееся тем, что спиральная торсионная пружина (44) взаимодействует со вторым шарниром (2) и помогает отведению фиксирующей защелки (11) внутрь фиксирующего блока (9).
24. Предохранительный спусковой механизм для продольного фиксирующего устройства (100), которое объединяет характеристики, определенные в пп.1-23, причем предохранительный спусковой механизм расположен внутри фиксирующего блока (9) и отличается тем, что содержит
балансир (35), снабженный контактной поверхностью (52) и выполненный с возможностью поворота на четвертом шарнире (4), причем упомянутый балансир (35) связан с концом второй штанги (14) сжатия и концом регулируемого стержня (27), который сообщается с картриджем (25) цилиндрической пружины сжатия,
контактная поверхность (52) смещает вторую штангу (14) сжатия под действием продольного усилия, приложенного к фиксирующей защелке (11) и превышающего предварительно установленное продольное усилие.
25. Предохранительный спусковой механизм по п.24, отличающийся тем, что продольное усилие, приложенное к фиксирующей защелке (11), отклоняет штанговый механизм и прижимает контактную поверхность (52) к штанге (14) сжатия.
26. Предохранительный спусковой механизм по п.25, отличающийся тем, что он механически освобождает фиксирующую защелку (11) во включенном режиме путем обнаружения продольного усилия, установленного заранее и не превышающего усилие выброса груза.
27. Предохранительный спусковой механизм по п.26, отличающийся тем, что он механически освобождает фиксирующую защелку (11) во включенном режиме посредством продольного усилия между 4000 и 4400 фунтами.
| US 2003057326 A1,27.03.2003 | |||
| US 2013166063 A1, 27.03.2013 | |||
| US 2013168494 A1, 04.07.2013 | |||
| СИСТЕМА ДЛЯ РАЗМЕЩЕНИЯ И ДЕСАНТИРОВАНИЯ ГРУЗОВ С ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2426675C2 |

