Изобретение относится к области авиационной техники, а именно к беспилотным летательным аппаратам (далее-БПЛА), предназначенным для перехвата или повреждения малоразмерных летательных аппаратов в случае их несанкционированных полетов.
Известен ряд средств защиты воздушного пространства от несанкционированных полетов БПЛА, среди которых средства радиоэлектронной борьбы (РЭБ), поражение мишеней снарядами или ракетами, а также улавливание сетями (развернутыми, выстреливаемыми).
Так, известно устройство перехвата беспилотных летательных аппаратов (патент РФ 2738383, опубл. 19.10.2020), содержащее корпус, блок аппаратуры управления, систему энергоснабжения, автопилота и приемника команд управления, датчики обнаружения, электродвигатели с пропеллерами, а также крыло с изменяемой геометрией, снабженное сетью для улавливания БПЛА-нарушителя. Известное решение дополнительно содержит шарниры и электродвигатель с редуктором, которые обеспечивают изменение геометрии крыла. Использование устройства в частности предполагает разделение его на две части, соединенные сетью и их разлет, что усложняет конструкцию, эксплуатацию и обслуживание данного технического решения. В другом случае устройство включает четыре независимые корпуса, несущие контейнер с сетью. Части устройства управляются с помощью алгоритмов группового управления БПЛА. При этом известные в настоящий момент алгоритмы управления роем БПЛА используют технологию высокоточной спутниковой навигации. В условиях работы систем РЭБ, навигация глушится в первую очередь, что делает затруднительным работу данного устройства.
Известно устройство-истребитель для поражения беспилотных летательных аппаратов (Патент РФ 2767401, опубл. 17.03.2022), включающее радиолокатор, дистанционно пилотируемый летательный аппарат с видеокамерами обзора и датчиками перемещения, контейнеры для кассет с поражающими элементами в виде капсул с иглой, содержащей малогабаритный радиопередатчик и боезаряд с таймером для его подрыва в заданное время. Концепция применения устройства-истребителя предусматривает сближение с БПЛА-нарушителем в задней плоскости, выравнивание скоростей и отстрел заряда. Данная тактика невозможна в случае маневрирующей цели, что снижает функциональность известного устройства.
Известен многоцелевой БПЛА-перехватчик (Патент РФ 2723203, опубл. 09.06.2020), содержащий таран с ударной частью, устройство поглощения энергии удара с шарниром и демпфером в виде амортизатора. На таране установлены рамка с растянутой сеткой и гарпун. Известное устройство содержит ряд сложных механизированных узлов, которые необходимо подстраивать под условия столкновения в реальном времени. Раскрытый таранный модуль по габаритным размерам соизмерим или превышает размеры носителя, что может ухудшать аэродинамику перехватчика. Следовательно, активация таранного модуля должна происходить непосредственно перед столкновением с нарушителем. Это накладывает высокие требования к работе системы наведения и управления, что увеличивает вероятность промаха, особенно в случае преследования маневренной воздушной цели.
Также известен беспилотный летательный аппарат-перехватчик (Патент РФ 2699148, опубл. 03.09.2019), который состоит из фюзеляжа в виде ферменной конструкции, трапецевидного крыла с двигателями. В фюзеляже вдоль расчетной оси посредством скользящей опоры «ласточкин хвост» и заднего демпфирующего узла крепится вооружение стрелковый комплекс. Известное устройство требует высокой точности наведения при любой ветровой нагрузке, что ограничивает его применимость для эффективного достижения результата. Кроме того, огнестрельное оружие имеет ограниченное применение в гражданской сфере.
Задача, на решение которой направлено заявляемое изобретение, заключается в создании многофункционального БПЛА-перехватчика, надежного в выполнении задач по защите от несанкционированных полетов БПЛА.
Технический результат, достигаемый изобретением, заключается в расширении функциональных возможностей БПЛА-перехватчика, характеризующегося надежностью работы при сохранении характеристик траектории его полета.
Для достижения технического результата заявляется беспилотный летательный аппарат-перехватчик, включающий корпус с системами управления, навигации и энергоснабжения, устройством метания средства поражения и винтомоторной группой, отличающийся тем, что содержит устройство метания средств поражения, выполненное в виде размещенных на корпусе по меньшей мере трех метательных трубок, соединенных с полостью, содержащей компенсационную камеру с поверхностью вогнутой формы, размещенной напротив входа, соединяющего полость с источником избыточного давления.
БПЛА-перехватчик может содержать в качестве средства поражения метательную сетку.
БПЛА-перехватчик может содержать в качестве средства поражения дробь.
БПЛА-перехватчик может содержать винтомоторную группу, работающую в режиме «толкающего винта».
БПЛА-перехватчик может содержать электронные платы, размещенные на плоскости, перпендикулярной к оси метания посредством амортизационных стоек.
БПЛА-перехватчик может содержать электронные платы, покрытые компаундом.
БПЛА-перехватчик может быть выполнен в виде мультикоптера.
БПЛА-перехватчик может быть выполнен на самолетном шасси.
В отличие от известных решений в предлагаемом БПЛА-перехватчике устройство метания средства поражения выполнено в виде размещенных на корпусе по меньшей мере трех метательных трубок, что позволяет использовать различные средства метания, например, облако дроби или метательную сетку - в зависимости от поставленных задач и условий окружающей среды. Использование по меньшей мере трех метательных трубок необходимо для того, чтобы развернуть метательную сетку в плоскость - для захвата и буксировки БПЛА-нарушителя. При этом может быть использовано большее количество метательных трубок (оптимально - четыре), которые будут создавать большее количество точек для разворота сетки для захвата или активного использования дроби - для поражения БПЛА-нарушителя. При этом устройство метания можно располагать на разных частях корпуса БПЛА-перехватчика: спереди носовой части на продольной оси перехватчика; под острым углом к продольной оси перехватчика в верхней или нижней части корпуса. Выполнение устройства метания в виде по меньшей мере трех метательных трубок и их размещение на корпусе БПЛА-перехватчика позволяет использовать его в качестве таранного устройства - в зависимости от сложившихся условий, например, при невозможности захвата или поражения иными средствами, а также в случае промаха. Это обеспечивает расширение функциональных возможностей заявленного изобретения, а также влияет на надежность его работы, поскольку устройство лишено сложных механизированных узлов.
Также важным условием надежной работы БПЛА-перехватчика является сохранение траектории полета при метании средства поражения. В заявленном изобретении снижение «эффекта отдачи» обеспечивается за счет компенсационной камеры. Указанная камера размещена в полости, соединяющей метательные трубки и источник избыточного давления, используемый при метании средства поражения. Камера включает поверхность вогнутой формы, расположенную напротив входа, соединяющего полость с источником избыточного давления. За счет пространства со стенками, образованного вогнутой поверхностью камеры, часть газов задерживается в данном пространстве, продвигая аппарат вперед, что уменьшает изменение траектории полета перехватчика, вызванное произведенным метанием. Указанное решение по компенсации отдачи не содержит движущихся частей, не требует технически сложного обслуживания, что также положительно влияет на надежность работы устройства.
В одном случае, например, в условиях густонаселенных районов БПЛА-перехватчик выполняет функцию захвата БПЛА-нарушителя посредством средства поражения в виде метательной сетки.
В другом случае, например, на линии военного соприкосновения, БПЛА-перехватчик выполняет функцию поражения посредством метания облака дроби.
В другом случае, например, при сильной ветровой нагрузке или при неуспешных действиях по захвату или поражению БПЛА-нарушителя, БПЛА-перехватчик выполняет функцию поражения, используя метательные трубки в качестве тарана. При этом использование винтомоторной группы в режиме «толкающего винта» позволяет таранить корпусом устройства с установленными на нем метательными трубками без опасения получить собственные повреждения моторов с винтами.
При этом размещение электронных плат системы управления и навигации на плоскости, перпендикулярной оси метания посредством резиновых амортизационных стоек, покрытие плат компаундом позволяет снизить нагрузку на электронные компоненты во время метания.
Сущность изобретения поясняется фигурами с наглядными изображениями БПЛА-перехватчика. На фиг. 1 - БПЛА-перехватчик в виде мультикоптера, вид сбоку; на фиг. 2 - БПЛА-перехватчик мультикоптерного типа в разрезе; на фиг. 3 - БПЛА-перехватчик на самолетном шасси вид сбоку; на фиг. 4 - БПЛА-перехватчик на самолетном шасси в разрезе, при этом:
1 - корпус;
2 - устройство метания средств поражения (метательные трубки);
3 - винтомоторная группа;
4 - полость с компенсационной камерой;
5 - компенсационная камера;
6 - вход, соединяющий полость с источником избыточного давления;
7 - источник избыточного давления;
8 - электронные платы контроллеров управления полетом, устройством метания, навигации, наведения;
9 - аккумулятор;
10 - датчики обнаружения и определения расстояния;
11 - пыжи;
12 - держатель с метательной сеткой;
13 - электромагнит;
14 - аэродинамические плоскости;
Беспилотный летательный аппарат-перехватчик включает корпус 1 с системами управления, навигации, содержащие электронные платы 8, систему энергоснабжения с аккумулятором 9, винтомоторную группу 3, устройство метания средств поражения 2 в виде размещенных на корпусе 1 по меньшей мере трех метательных трубок, соединенных с полостью 4 с компенсационной камерой 5 с поверхностью вогнутой формы, размещенной напротив входа 6, соединяющего полость 4 с источником избыточного давления 7.
БПЛА-перехватчик имеет корпус 1 в виде обтекателя - облегченного пластикового кожуха, системы управления и навигации с электронными платами 8 контроллера управления полетом, управления устройством метания, модулем наведения, приемником радиосигналов дистанционного управления, радиопередатчиком, приемником спутниковой навигации, а также систему энергоснабжения, содержащую аккумулятор 9 и схему распределения питания. Электронные платы 8 размещены на плоскости, перпендикулярной оси метания, закреплены посредством резиновых амортизационных стоек и покрыты компаундом.
БПЛА-перехватчик снабжен датчиками обнаружения и определения расстояния 10 - видеокамерой, подключенной к радиопередатчику для передачи видеоинформации оператору и к модулю наведения - для возможности автономного управления БПЛА-перехватчиком с целью удержания выбранной воздушной мишени в центре поля видеокамеры без участия оператора - и дальномером любого типа (ультразвуковым, оптическим, радиолокационным), подключенным к плате управления устройством метания.
На корпусе 1 БПЛА-перехватчика посредством, например, резьбового соединения, под углом 25-30 градусов к продольной оси БПЛА-перехватчика (для наилучшего раскрытия метательной сетки) установлены метательные трубки 2, внутри которых размещены пыжи 11. Пыжи привязаны к углам сетки, сложенной в легком держателе 12, выполненном, например, в виде пластиковой полости конусообразной формы, размещенной между трубками 2. В другом случае в метательные трубки 2 между пыжами 11 помещают дробь.
Метательные трубки 2 соединены с расположенной в корпусе 1 полостью 4, содержащей компенсационную камеру 5 с поверхностью вогнутой формы, расположенную напротив входа 6, соединяющего полость 4 с источником избыточного давления 7. В качестве источника избыточного давления 7 могут применять баллон с сжатым воздухом или пиропатрон. Источник избыточного давления 7 крепится внутри корпуса 1 посредством универсальной присоединительной резьбы и снабжен спусковым устройством в виде электромагнита 13.
БПЛА-перехватчик может быть выполнен в виде мультикоптера или на самолетном шасси, снабженных моторами и винтами.
Пример 1.
БПЛА-перехватчик выполнен в виде мультикоптера (фиг. 1, 2), содержащего, например, четыре метательные трубки 2, расположенные в носовой части корпуса, между которыми размещен держатель с метательной сеткой 12. Трубки 2 соединены с полостью 4, в которой размещена компенсационная камера 5 с вогнутой поверхностью, расположенной напротив входа 6, соединяющего полость 4 с баллонном со сжатым воздухом 7 под давлением 50-70 атм. За указанными элементами расположен отсек с электронными платами 8, аккумуляторный отсек 9 расположен в нижней части корпуса. Видеокамера и дальномер 10 закреплены в носовой части БПЛА-перехватчика. В кормовой части корпуса расположены лучи, выполненные в виде аэродинамических плоскостей 14, на концах которых расположена винтомоторная группа 3, содержащая четыре мотора с винтами. Указанная группа работает в режиме «толкающего винта», продвигая аппарат вперед и отбрасывая воздух назад, что оптимально при реализации таранной функции БПЛА-перехватчиком.
Пример 2.
БПЛА-перехватчик выполнен на самолетном шасси (фиг. 3, 4) и содержит, например, четыре метательные трубки 2, в которые заложена дробь. Метательные трубки 2 сообщаются с полостью 4, содержащей компенсационную камеру 5 с вогнутой поверхностью, расположенную напротив входа, соединяющего полость 4 с источником избыточного давления 7. БПЛА перехватчик, аналогично примеру 1, содержит отсек с электронными платами 8, аккумулятором 9, видеокамеру и дальномер 10. Устройство метания средств поражения (метательные трубки) 2 может быть расположено, например, в носовой части (как показано на фиг. 3) для метания по курсу следования перехватчика или в нижней части фюзеляжа - для метания вниз. В средней части корпуса расположены два крыла, а также два мотора с винтами 3.
Заявленное изобретение работает следующим образом.
При обнаружении БПЛА-нарушителя посредством, например, радиолокатора или при визуальном обнаружении, его идентификации, определении степени опасности и координат, оператор поднимает в воздух БПЛА-перехватчик и управляет им до обнаружения воздушной мишени на экране видеокамеры перехватчика.
При наличии в БПЛА-перехватчике модуля автоматического наведения и удержания цели без участия оператора БПЛА-перехватчик сближается с БПЛА-нарушителем до 5-8 м. Дальномер непрерывно определяет расстояние до воздушной мишени и передает информацию в модуль управления устройством метания. При достижении рабочего расстояния (5-8 м) данный модуль активирует электромагнит, и посредством избыточного давления происходит выброс метательной сетки или облака дроби. При этом «эффект отдачи» компенсируется за счет формы компенсационной камеры, задерживающей часть газов, продвигающих аппарат вперед, что уменьшает изменение траектории полета перехватчика, вызванное произведенным метанием. Метательная сетка запутывается в винтомоторной группе БПЛА-нарушителя, и его полет заканчивается. В другом случае критически важные элементы воздушной мишени поражаются облаком дроби, происходит ее падение. В случае неудавшихся попыток перехвата БПЛА-нарушителя средствами поражения или в случае работы с несколькими БПЛА-нарушителями БПЛА-перехватчик осуществляет таран, используя устройство метания средств поражения (метательные трубки), способные повредить винты воздушной мишени. Размещение винтомоторной группы в кормовой части БПЛА-перехватчика, выполненного в виде мультикоптера, минимизирует ее повреждение при столкновении.
Если в БПЛА-перехватчике отсутствует модуль автоматического наведения и удержания цели, оператор в ручном режиме управляет полетом аппарата-перехватчика, удерживая воздушную мишень в центре видеокамеры. При сближении на рабочее расстояние происходит автоматическое метание средства поражения.
Таким образом, заявленное решение надежно в использовании и обладает расширенными функциональными возможностями по защите воздушного пространства от БПЛА-нарушителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| БПЛА-перехватчик (варианты) | 2024 |
|
RU2825677C1 |
| Многоцелевой БПЛА-перехватчик | 2020 |
|
RU2723203C1 |
| СИСТЕМА ЗАЩИТЫ ОБЪЕКТА ОТ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2023 |
|
RU2823195C1 |
| Беспилотный летательный аппарат-перехватчик | 2020 |
|
RU2741142C2 |
| Универсальный комплекс распределенного управления интеллектуальными роботами для борьбы с малогабаритными беспилотными летательными аппаратами | 2023 |
|
RU2817740C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОПЛАН КРИШТОПА (БКК), СПОСОБ ФУНКЦИОНИРОВАНИЯ БКК И СПОСОБ ФУНКЦИОНИРОВАНИЯ УСТРОЙСТВА ВЕРТИКАЛЬНОГО ЗАПУСКА ПРИ ИСПОЛЬЗОВАНИИ С БКК | 2022 |
|
RU2809067C1 |
| Способ противодействия беспилотным летательным аппаратам | 2020 |
|
RU2743401C1 |
| Система боевых беспилотных летательных аппаратов | 2022 |
|
RU2808733C1 |
| Малый беспилотный летательный аппарат (варианты) | 2023 |
|
RU2824014C1 |
| СИСТЕМА ДОСТАВКИ ГРУЗА | 2018 |
|
RU2689643C1 |
Беспилотный летательный аппарат-перехватчик имеет корпус с системами управления, навигации и энергоснабжения, винтомоторную группу, а также устройство метания средства поражения. Устройство для метания содержит три метательные трубки, соединенные с полостью, содержащей компенсационную камеру с поверхностью вогнутой формы, размещенной напротив входа, соединяющего полость с источником избыточного давления. Технический результат - расширение функциональный возможностей БПЛА-перехватчика. 7 з.п. ф-лы, 4 ил.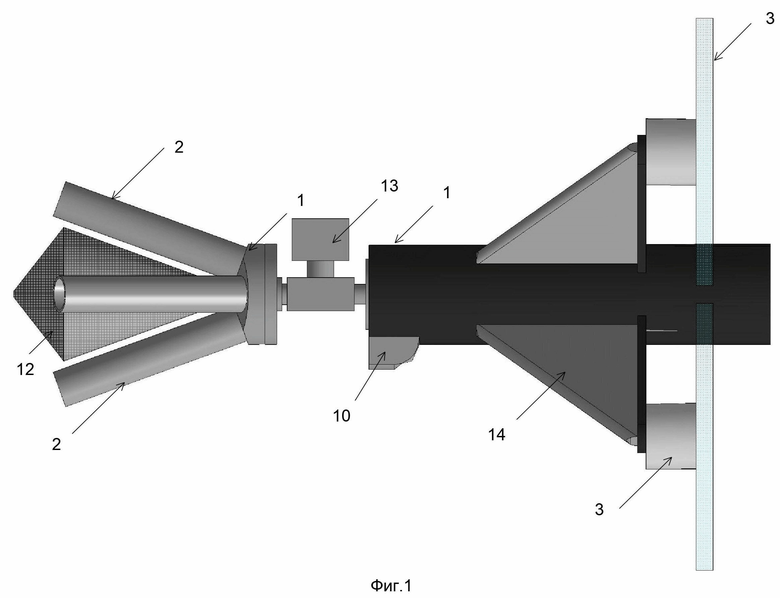
1. Беспилотный летательный аппарат-перехватчик, включающий корпус с системами управления, навигации и энергоснабжения, устройством метания средства поражения и винтомоторной группой, отличающийся тем, что содержит устройство метания средства поражения, выполненное в виде размещенных на корпусе по меньшей мере трех метательных трубок, соединенных с полостью, содержащей компенсационную камеру с поверхностью вогнутой формы, размещенной напротив входа, соединяющего полость с источником избыточного давления.
2. Беспилотный летательный аппарат-перехватчик по п.1, отличающийся тем, что в качестве средства поражения содержит метательную сетку.
3. Беспилотный летательный аппарат-перехватчик по п.1, отличающийся тем, что в качестве средства поражения содержит дробь.
4. Беспилотный летательный аппарат-перехватчик по п.1, отличающийся тем, что содержит винтомоторную группу, работающую в режиме «толкающего винта».
5. Беспилотный летательный аппарат-перехватчик по п.1, отличающийся тем, что содержит электронные платы, размещенными на плоскости, перпендикулярной к оси метания посредством амортизационных стоек.
6. Беспилотный летательный аппарат-перехватчик по п.1, отличающийся тем, что содержит систему управления с электронными платами, покрытыми компаундом.
7. Беспилотный летательный аппарат-перехватчик по п.1, отличающийся тем, что выполнен в виде мультикоптера.
8. Беспилотный летательный аппарат-перехватчик по п.1, отличающийся тем, что выполнен на самолетном шасси.
| KR 102152739 B1, 07.09.2020 | |||
| US 7398617 B2, 15.07.2008 | |||
| US 4912869 A1, 03.04.1990 | |||
| Способ изготовления резиновых рукавов | 1939 |
|
SU57441A1 |
| Станок для придания концам круглых радиаторных трубок шестигранного сечения | 1924 |
|
SU2019A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ВЕРТИКАЛЬНОСТИ ЦЕНТРАЛЬНОЙ ГЕОМЕТРИЧЕСКОЙ ОСИ ПРОФИЛЯ ПАНЕЛИ | 0 |
|
SU208980A1 |
| US 10030943 B2, 24.07.2018 | |||
| US 10435153 B2, 08.10.2019 | |||
| УСТРОЙСТВО ДЛЯ МЕТАНИЯ СЕТИ И СПОСОБ УКЛАДКИ СЕТИ В УСТРОЙСТВО | 2002 |
|
RU2230276C1 |

