ПРЕДПОСЫЛКИ СОЗДАНИЯ ИЗОБРЕТЕНИЯ
Область техники
Настоящее изобретение относится к области роботизированных технологий и, в частности, к перемещающемуся по тросу роботизированному устройству, выполненному с возможностью преодоления препятствия, и способу преодоления им препятствия.
Описание связанного уровня техники
Роботизированные устройство могут не только выполнять монотонные и трудоемкие задачи повседневной жизни и упрощать жизнедеятельность человека, но также могут заменить людей в недосягаемых для человека местах, таких как узкая и глубокая местность, а также чрезвычайно холодная местность, для выполнения задач, которые не могут выполняться людьми. Таким образом, стальной трос в узкой и глубокой местности используется в качестве носителя, а на тросе расположено несколько перемещающихся по тросу роботизированных устройств для образования беспроводной сети наблюдения на датчиках с целью выполнения наблюдения и обслуживания поверхности стального троса и окружающей местности. Однако, когда роботизированное устройство на тросе перестает перемещаться, исходная беспроводная сеть наблюдения на датчиках разрушается. Несмотря на то, что беспроводная сеть наблюдения на датчиках может быть отремонтирована путем регулировки других роботизированных устройств, функционирующих должным образом, она не полностью подлежит ремонту и может усложнить всю систему управления. Если в конкретной области проверки повреждено несколько перемещающихся по тросу роботизированных устройств, то это приводит к отказу всей беспроводной сети наблюдения на датчиках, что может подвергнуть серьезной угрозе производительность и персонал предприятия.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
Техническая задача
Ввиду недостатков уровня техники, в настоящем изобретении представлено перемещающееся по тросу роботизированное устройство, выполненное с возможностью переворачивания. Перемещающееся по тросу роботизированное устройство может свободно перемещаться и преодолевать неисправное роботизированное устройство, которое не может перемещаться ввиду неисправности, тем самым реализуя автономное обслуживание и ремонт беспроводной сети наблюдения на датчиках, а также предусмотрено постоянное узловое соединение для наблюдения за обнаруживаемыми незначительными повреждениями и местоположениями, в котором произошло повреждение, при любых погодных условиях.
Техническое решение
Для решения указанных выше технических задач, в настоящем изобретении предполагается использование следующих технических решений.
Представлено перемещающееся по тросу роботизированное устройство, выполненное с возможностью переворачивания и содержащее корпус роботизированного устройства, причем корпус роботизированного устройства выполнен с возможностью перемещения вдоль направляющего элемента и содержит кожух, приводной модуль и направляющий модуль. В положениях посередине на двух концах кожуха выполнены сквозные отверстия, находящиеся в сообщении друг с другом, для прохождения направляющего элемента через них. Приводной модуль и направляющий модуль установлены в кожухе отдельно вдоль продольного направления направляющего элемента. Кожух разделен в продольном направлении на четное количество сегментов кожуха и разделен в поперечном направлении на соответствующий приводной вмещающий сегмент и соответствующий направляющий вмещающий сегмент, согласно положениям установки приводного модуля и направляющего модуля в кожухе. Предусмотрен по меньшей мере один направляющий модуль и по меньшей мере один направляющий вмещающий сегмент, и в кожухе также установлен механизм открытия кожуха.
Механизм открытия кожуха содержит первый механизм открытия кожуха, выполненный с возможностью открытия/закрытия направляющего вмещающего сегмента, и второй механизм открытия, выполненный с возможностью открытия/закрытия приводного вмещающего сегмента.
Каждый сегмент кожуха, соответствующий каждому направляющему вмещающему сегменту, снабжен одним первым механизмом открытия кожуха. Взаимодействие первых механизмов открытия кожуха может обеспечивать открытие/закрытие сегмента кожуха, соответствующего направляющему вмещающему сегменту в кожухе. Каждый первый механизм открытия кожуха содержит платформу для открытия и установки кожуха, а также торсионную пружину из сплава с памятью формы. Торсионная пружина из сплава с памятью формы установлена на платформе для открытия и установки кожуха. Платформа для открытия и установки кожуха имеет торсионное плечо на одном конце, прикрепленном к платформе для открытия и установки кожуха, а также торсионное плечо на другом конце, прикрепленном к одному из сегментов кожуха, соответствующему направляющему вмещающему сегменту.
Второй механизм открытия кожуха может открывать/закрывать два сегмента кожуха, расположенные под углом 180°, соответствующие приводному вмещающему сегменту в кожухе, и содержит ножницеобразные штанги и регулировочный механизм, который синхронно толкает ножницеобразные штанги для перемещения в том же направлении для осуществления открытия/закрытия ножницеобразных штанг. Регулировочный механизм содержит два линейных приводных механизма, и неподвижные части двух линейных приводных механизмов соответствующим образом установлены в сегментах кожуха, расположенных под углом 180°. Оба конца каждой из двух штанг в ножницеобразной штанге соединены между неподвижной частью одного из двух линейных приводных механизмов и силового приводного конца другого линейного приводного механизма. Платформа для открытия и установки кожуха прикреплена к неподвижной части линейного приводного механизма второго механизма открытия кожуха.
Кроме того, предусмотрено два направляющих модуля: первый направляющий модуль и второй направляющий модуль, которые отдельно расположены с двух сторон приводного модуля вдоль продольного направления направляющего элемента.
Кожух разделен в поперечном направлении на три сегмента: последовательно, первый вмещающий сегмент, второй вмещающий сегмент и третий вмещающий сегмент.
Первый вмещающий сегмент и третий вмещающий сегмент являются направляющими сегментами корпуса, первый направляющий модуль установлен в первом вмещающем сегменте, а второй направляющий модуль установлен в третьем вмещающем сегменте.
Второй вмещающий сегмент представляет собой приводной вмещающий сегмент.
Кроме того, кожух разделен в продольном направлении на четыре сегмента кожуха: первый сегмент кожуха, второй сегмент кожуха, третий сегмент кожуха и четвертый сегмент кожуха.
Кроме того, линейный приводной механизм представляет собой винтовой механизм, содержащий шаговый двигатель, спиральный винт, соединенный с концом выдачи мощности шагового двигателя, и винтовую гайку, находящуюся в резьбовом штуцерном соединении со спиральным винтом. Спиральный винт каждого винтового механизма соответствующим образом закреплен в каждом сегменте кожуха, соответствующем второму вмещающему сегменту, вдоль продольного направления кожуха. Платформа для открытия и установки кожуха прикреплена к спиральному винту с помощью болта.
Кроме того, первый механизм открытия кожуха дополнительно содержит двухстороннюю шпильку, пружинную шайбу и гайку.
Двухсторонняя шпилька прикреплена к платформе для открытия и установки кожуха с помощью гайки, прилегающей на обоих концах.
Торсионная пружина из сплава с памятью формы облегает двухстороннюю шпильку по периферии, а двухсторонняя шпилька оснащена пружинной шайбой на внешней стороне каждого из двух концов или одном конце торсионной пружины из сплава с памятью формы.
Кроме того, приводной модуль расположен в кожухе и содержит четыре малых приводных модуля: первый малый приводной модуль, второй малый приводной модуль, третий малый приводной модуль и четвертый малый приводной модуль. Первый малый приводной модуль, второй малый приводной модуль, третий малый приводной модуль и четвертый малый приводной модуль расположены в кожухе двумя слоями.
Первый малый приводной модуль и третий малый приводной модуль образуют верхний привод приводного модуля и распределены по одной и той же кольцевой поверхности под углом 180° в положении стыковки первого вмещающего сегмента и второго вмещающего сегмента. Второй малый приводной модуль и четвертый малый приводной модуль образуют нижний привод приводного модуля и распределены по одной и той же кольцевой поверхности под углом 180° в положении стыковки второго вмещающего сегмента и третьего вмещающего сегмента.
Кроме того, каждый малый приводной модуль содержит платформу приводного механизма, бесщеточный двигатель постоянного тока, редуктор, редуктор конической шестерни первой ступени, приводной вал и магнитное колесо. Бесщеточный двигатель постоянного тока, редуктор, редуктор конической шестерни первой ступени и приводной вал установлены по отдельности на платформе приводного механизма. Конец выдачи мощности бесщеточного двигателя постоянного тока соединен с магнитным колесом после последовательного прохождения через редуктор, редуктор конической шестерни первой ступени и приводной вал.
Кроме того, каждый направляющий модуль содержит четыре малых направляющих модуля, и малые направляющие модули расположены с соответствием четырем сегментам кожуха. Каждый малый направляющий модуль содержит опору направляющего механизма, пружину растяжения направляющего механизма и направляющее колесо. Направляющее колесо расположено и поддерживается опорой направляющего механизма, а опора направляющего механизма прикреплена к кожуху посредством пружины растяжения направляющего механизма. Пружина растяжения направляющего механизма выполнена из материала сплава с памятью формы.
Кроме того, первый вмещающий сегмент и третий вмещающий сегмент имеют форму усеченного конуса, а второй вмещающий сегмент является цилиндрическим. Кожух сформирован в виде овалоподобной конструкции с толстой срединной частью и двумя коническими концами за счет последовательной стыковки первого вмещающего сегмента, второго вмещающего сегмента и третьего вмещающего сегмента.
Другая техническая задача настоящего изобретения заключается в представлении способа преодоления препятствия на основе перемещающегося по тросу роботизированного устройства, выполненного с возможностью переворачивания и описанного выше. Когда корпус роботизированного устройства обнаруживает наличие впереди неисправного роботизированного устройства, приводным модулем, направляющим модулем и механизмом открытия кожуха управляют для того, чтобы корпус роботизированного устройства преодолел неисправное роботизированное устройство. В частности, способ включает следующие этапы:
(1) если корпус роботизированного устройства обнаруживает наличие впереди неисправного роботизированного устройства, то шаговый двигатель вращается для выхода из предварительно затянутого состояния;
(2) бесщеточный двигатель постоянного тока вращается для приведения магнитного колеса во вращение, причем предусмотрен инфракрасный датчик, функционирующий для обнаружения того, имеется ли впереди неисправное роботизированное устройство;
(3) после обнаружения неисправного роботизированного устройства инфракрасным датчиком, бесщеточный двигатель постоянного тока в приводном модуле останавливается и выполняется нагревание торсионной пружины из сплава с памятью формы;
(4) после завершения нагревания торсионной пружины из сплава с памятью формы, бесщеточный двигатель постоянного тока и шаговый двигатель совместно вращаются для преодоления третьего вмещающего сегмента неисправного роботизированного устройства, а после преодоления третьего вмещающего сегмента, шаговый двигатель прекращает вращаться;
(5) когда магнитное колесо достигает первого вмещающего сегмента неисправного роботизированного устройства, шаговый двигатель корпуса роботизированного устройства вращается для складывания ножницеобразных штанг;
(6) после того, как корпус роботизированного устройства полностью преодолел неисправное роботизированное устройство, шаговый двигатель прекращает вращаться, а бесщеточный двигатель постоянного тока продолжает вращаться; и
(7) если определено, что роботизированное устройство достигло специфического положения, то бесщеточный двигатель постоянного тока прекращает вращаться, а шаговый двигатель вращается для предварительного затягивания спирального винта.
Полезный эффект
Благодаря представленным выше техническим решениям, настоящее изобретение обладает следующими преимуществами по сравнению с уровнем техники:
1. В настоящем изобретении кожух корпуса роботизированного устройства сначала разделяется в продольном направлении на блоки, и для выполнения открытия/закрытия корпуса роботизированного устройства для подготовки к преодолению препятствия корпусом роботизированного устройства используется специальный механизм открытия. Кроме того, корпус роботизированного устройства разбит в поперечном направлении на сегменты (причем направляющий вмещающий сегмент и приводной вмещающий сегмент расположены на основе сегментов), чтобы могло быть выполнено преодоление препятствия. Таким образом, роботизированное устройство по настоящему изобретению может не только преодолевать небольшие препятствия на стальном тросе, но также преодолевать само себя. Когда образована беспроводная сеть мониторинга, она обладает высокой способностью к автономному устранению сетевых отказов.
2. Роботизированное устройство может перемещаться по стальному тросу или в осевом направлении штанги, и его нагрузка является больше.
3. Приводной механизм роботизированного устройства представляет собой четыре отдельно запитываемых магнитных колеса. Конструкция магнитного колеса обеспечивает повышенную эффективность проверки по сравнению со способами с замедленным и ползучим перемещением. Колеса роботизированного устройства являются магнитными, что может обеспечить достаточную силу притягивания, а также может обеспечить повышенную силу трения и повышенную производительность роботизированного устройства по сравнению с другими конструкциями, такими как натяжение с помощью пружин.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
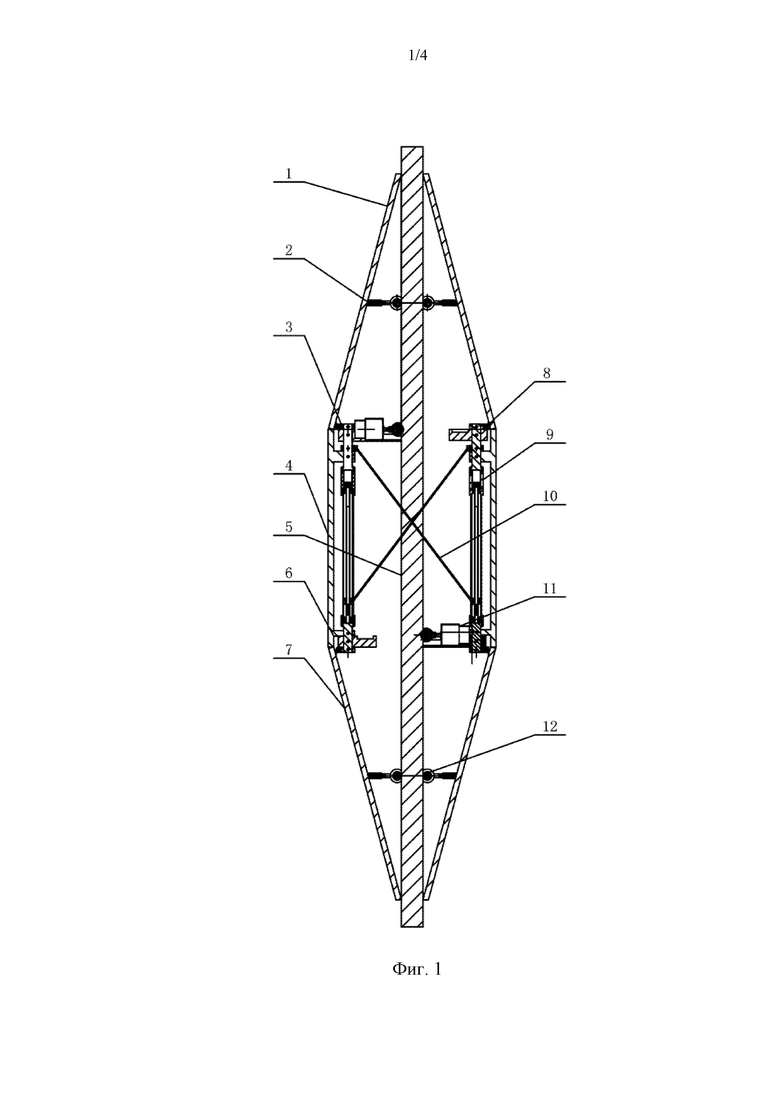
ФИГ. 1 представляет собой вид в поперечном сечении перемещающегося по тросу роботизированного устройства, выполненного с возможностью преодоления препятствия, согласно настоящему изобретению.
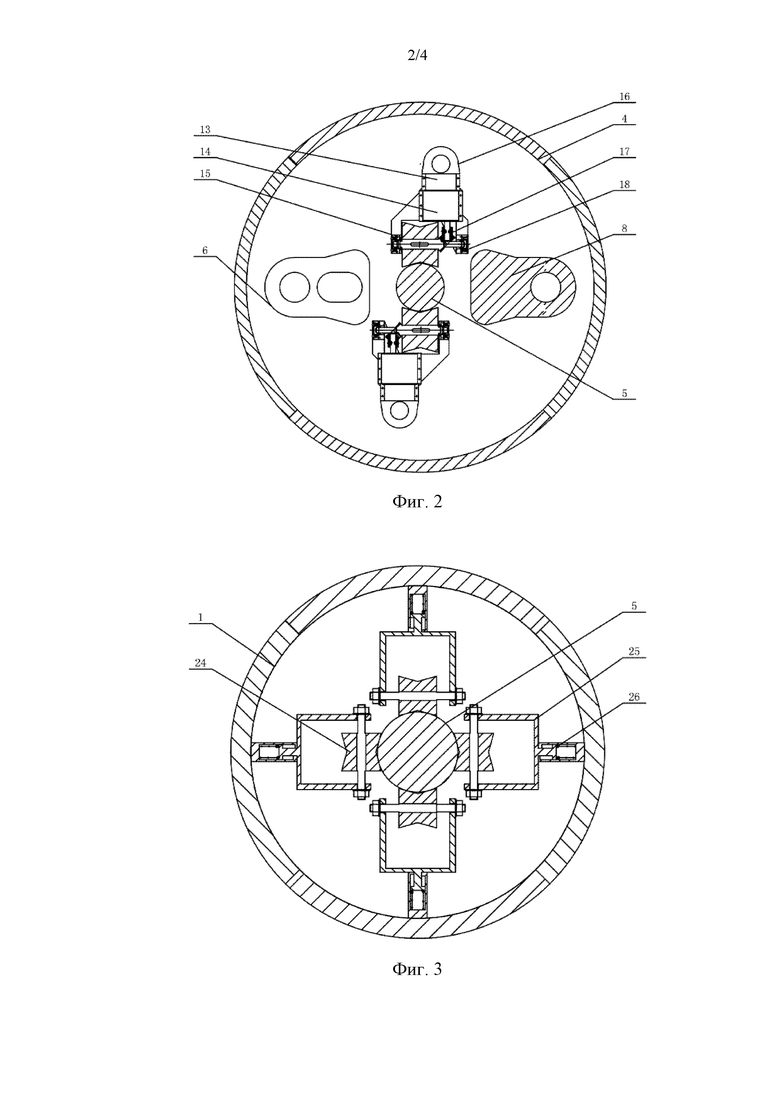
ФИГ. 2 представляет собой вид в поперечном сечении приводного модуля перемещающегося по тросу роботизированного устройства, выполненного с возможностью преодоления препятствия, согласно настоящему изобретению.
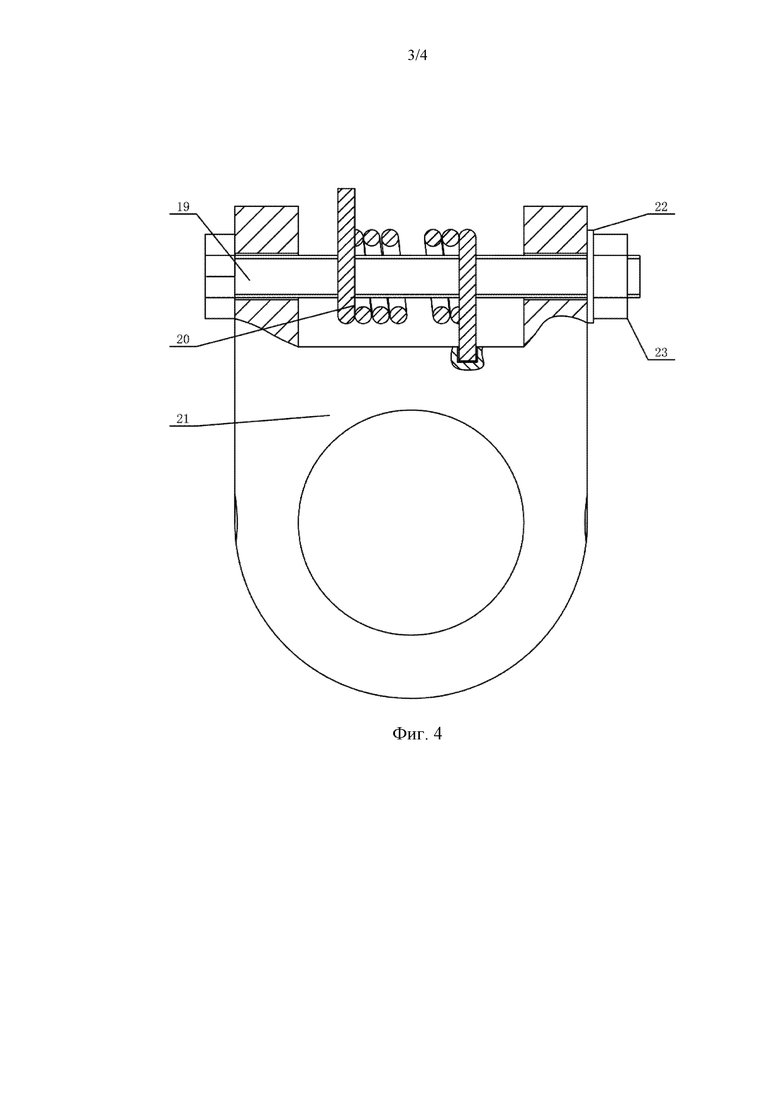
ФИГ. 3 представляет собой вид в поперечном сечении направляющего механизма перемещающегося по тросу роботизированного устройства, выполненного с возможностью преодоления препятствия, согласно настоящему изобретению.
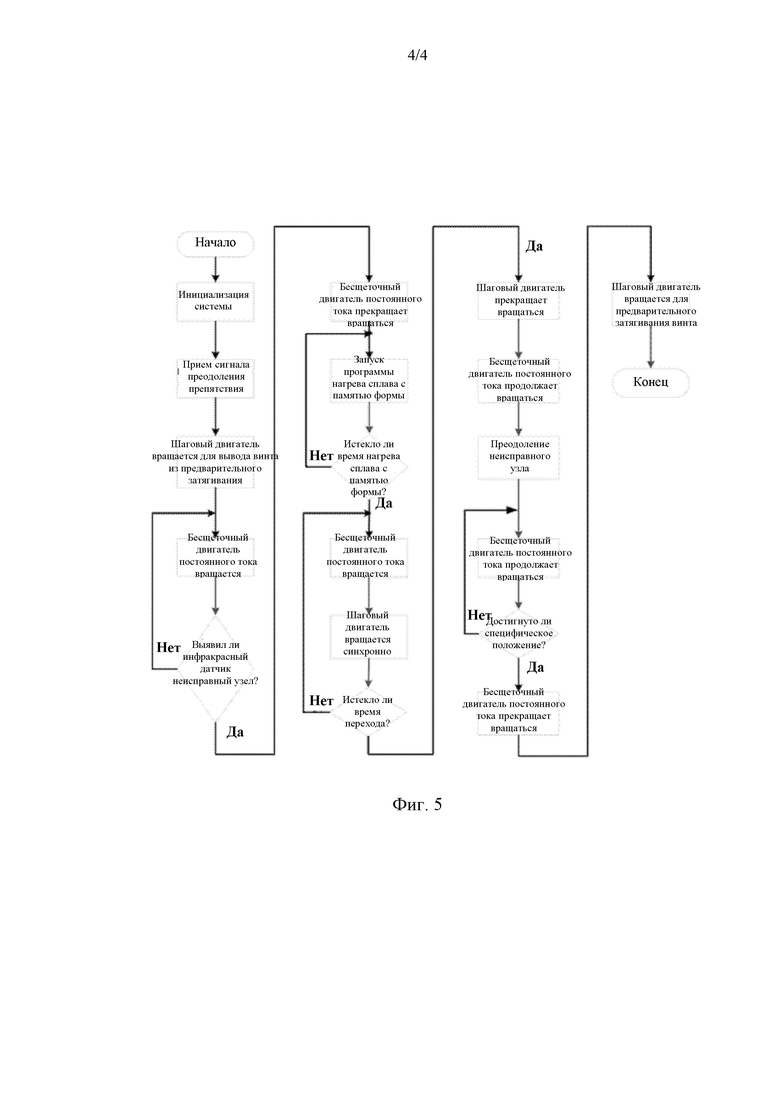
ФИГ. 4 представляет собой вид в поперечном сечении сплава с памятью формы перемещающегося по тросу роботизированного устройства, выполненного с возможностью преодоления препятствия, согласно настоящему изобретению.
ФИГ. 5 представляет собой схему способа управления перемещающимся по тросу роботизированным устройством, выполненным с возможностью преодоления препятствия, согласно настоящему изобретению.
На ФИГ. 1 - ФИГ. 5: 1. Кожух верхнего направляющего механизма; 2. Верхнее направляющее устройство; 3. Механизм из сплава с памятью формы; 4. Срединный кожух; 5. Стальной трос; 6. Платформа для размещения источника питания; 7. Кожух нижнего направляющего механизма; 8. Платформа для размещения контроллера и устройства беспроводной связи; 9. Спиральный винт; 10. Ножницеобразная штанга; 11. Приводной модуль; 12. Нижнее направляющее устройство; 13. Двигатель; 14. Редуктор; 15. Магнитное колесо; 16. Платформа приводного механизма; 17. Коническая зубчатая передача; 18. Приводной вал; 19. Двухсторонняя шпилька; 20. Торсионная пружина из сплава с памятью формы; 21. Платформа для открытия и установки кожуха; 22. Пружинная шайба; 23. Гайка; 24. Направляющее колесо; 25. Опора направляющего механизма; 26. Пружина натяжения направляющего механизма.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Далее ясно и полно описаны технические решения вариантов реализации настоящего изобретения со ссылкой на сопроводительные чертежи вариантов реализации настоящего изобретения. Безусловно, описанные варианты реализации являются лишь некоторыми, а не всеми вариантами реализации настоящего изобретения. Представленное далее описание по меньшей мере одного примера варианта реализации по сути является лишь иллюстративным и никоим образом не служит в качестве какого-либо ограничения настоящего изобретения и варианта его применения или использования. Все другие варианты реализации, полученные специалистами в данной области техники на основе вариантов реализации настоящего изобретения, без творческого труда будут подпадать под объем защиты настоящего изобретения. Если конкретное не указано иное, относительное расположение, выражения и значения компонентов и этапов, изложенных в этих вариантах реализации, не ограничивают объем настоящего изобретения. Кроме того, следует понимать, что для простоты описания, габаритные размеры частей, показанных на сопроводительных чертежах, не выполнены в фактическом масштабе. Технологии, способы и устройства, известные специалисту в данной области техники, могут быть подробно не описаны, однако там, где это уместно, технологии, способы и устройства следует рассматривать в качестве части представленного описания. Во всех примерах, показанных и описанных в настоящем документе, любое конкретное значение следует интерпретировать лишь в качестве примера, а не в качестве ограничения. Таким образом, в других примерах варианта реализации могут быть предусмотрены другие значения.
Для простоты описания, термины, относящиеся к расположению в пространстве, такие как «сверху на», «над», «на поверхности» и «на», могут использоваться в настоящем документе для описания взаимного расположения в пространстве одного устройства или признака и другого устройства или признака, показанного на фигуре. Следует понимать, что термины, относящиеся к расположению в пространстве, предназначены для охвата различных ориентаций при использовании или работе, отличных от ориентации устройств, показанной на фигуре. Например, если устройство изображено на фигуре перевернутым, то устройство, описанное, как «над другим устройством или конструкцией» или «на другом устройстве или конструкции», расположено, как «ниже другого устройства или конструкции» или «под другим устройством или конструкцией». Таким образом, приведенный в качестве примера термин «над» может включать в себя обе ориентации - «над» или «под». В качестве альтернативы, устройство может быть расположено иным образом (с вращением на 90 градусов или в других ориентациях).
Как показано на ФИГ. 1 - ФИГ. 5, перемещающееся по тросу роботизированное устройство, выполненное с возможностью переворачивания, согласно настоящему изобретению, содержит корпус роботизированного устройства, причем корпус роботизированного устройства выполнен с возможностью перемещения вдоль направляющего элемента и содержит кожух, приводной модуль и направляющий модуль. В положениях посередине на двух концах кожуха выполнены сквозные отверстия, находящиеся в сообщении друг с другом, для прохождения направляющего элемента через них. Приводной модуль и направляющий модуль установлены в кожухе отдельно вдоль продольного направления направляющего элемента. Кожух разделен в продольном направлении на четное количество сегментов кожуха и разделен в поперечном направлении на соответствующий приводной вмещающий сегмент и соответствующий направляющий вмещающий сегмент, согласно положениям установки приводного модуля и направляющего модуля в кожухе. Предусмотрен по меньшей мере один направляющий модуль и по меньшей мере один направляющий вмещающий сегмент, и в кожухе также установлен механизм открытия кожуха. Механизм открытия кожуха содержит первый механизм открытия кожуха, выполненный с возможностью открытия/закрытия направляющего вмещающего сегмента, и второй механизм открытия, выполненный с возможностью открытия/закрытия приводного вмещающего сегмента. Каждый сегмент кожуха, соответствующий каждому направляющему вмещающему сегменту, снабжен одним первым механизмом открытия кожуха. Взаимодействие первых механизмов открытия кожуха может обеспечивать открытие/закрытие сегмента кожуха, соответствующего направляющему вмещающему сегменту в кожухе. Каждый первый механизм открытия кожуха содержит платформу для открытия и установки кожуха, а также торсионную пружину из сплава с памятью формы. Торсионная пружина из сплава с памятью формы установлена на платформе для открытия и установки кожуха. Платформа для открытия и установки кожуха имеет торсионное плечо на одном конце, прикрепленном к платформе для открытия и установки кожуха, а также торсионное плечо на другом конце, прикрепленном к одному из сегментов кожуха, соответствующему направляющему вмещающему сегменту. Второй механизм открытия кожуха может открывать/закрывать два сегмента кожуха, расположенные под углом 180°, соответствующие приводному вмещающему сегменту в кожухе, и содержит ножницеобразные штанги и регулировочный механизм, который синхронно толкает ножницеобразные штанги для перемещения в том же направлении для осуществления открытия/закрытия ножницеобразных штанг. Регулировочный механизм содержит два линейных приводных механизма, и неподвижные части двух линейных приводных механизмов соответствующим образом установлены в сегментах кожуха, расположенных под углом 180°. Оба конца каждой из двух штанг в ножницеобразной штанге соединены между неподвижной частью одного из двух линейных приводных механизмов и силового приводного конца другого линейного приводного механизма. Платформа для открытия и установки кожуха прикреплена к неподвижной части линейного приводного механизма второго механизма открытия кожуха.
Кроме того, предусмотрено два направляющих модуля: первый направляющий модуль и второй направляющий модуль, которые отдельно расположены с двух сторон приводного модуля вдоль продольного направления направляющего элемента. Кожух разделен в поперечном направлении на три сегмента: последовательно, первый вмещающий сегмент, второй вмещающий сегмент и третий вмещающий сегмент. Первый вмещающий сегмент и третий вмещающий сегмент являются направляющими сегментами корпуса, первый направляющий модуль установлен в первом вмещающем сегменте, а второй направляющий модуль установлен в третьем вмещающем сегменте. Второй вмещающий сегмент представляет собой приводной вмещающий сегмент.
Кроме того, кожух разделен в продольном направлении на четыре сегмента кожуха: первый сегмент кожуха, второй сегмент кожуха, третий сегмент кожуха и четвертый сегмент кожуха.
Кроме того, линейный приводной механизм представляет собой винтовой механизм, содержащий шаговый двигатель, спиральный винт, соединенный с концом выдачи мощности шагового двигателя, и винтовую гайку, находящуюся в резьбовом штуцерном соединении со спиральным винтом. Спиральный винт каждого винтового механизма соответствующим образом закреплен в каждом сегменте кожуха, соответствующем второму вмещающему сегменту, вдоль продольного направления кожуха. Платформа для открытия и установки кожуха прикреплена к спиральному винту с помощью болта.
Кроме того, первый механизм открытия кожуха дополнительно содержит двухстороннюю шпильку, пружинную шайбу и гайку. Двухсторонняя шпилька прикреплена к платформе для открытия и установки кожуха с помощью гайки, прилегающей на обоих концах. Торсионная пружина из сплава с памятью формы облегает двухстороннюю шпильку по периферии, а двухсторонняя шпилька оснащена пружинной шайбой на внешней стороне каждого из двух концов или одном конце торсионной пружины из сплава с памятью формы.
Кроме того, приводной модуль расположен в кожухе и содержит четыре малых приводных модуля: первый малый приводной модуль, второй малый приводной модуль, третий малый приводной модуль и четвертый малый приводной модуль. Первый малый приводной модуль, второй малый приводной модуль, третий малый приводной модуль и четвертый малый приводной модуль расположены в кожухе двумя слоями. Первый малый приводной модуль и третий малый приводной модуль образуют верхний привод приводного модуля и распределены по одной и той же кольцевой поверхности под углом 180° в положении стыковки первого вмещающего сегмента и второго вмещающего сегмента. Второй малый приводной модуль и четвертый малый приводной модуль образуют нижний привод приводного модуля и распределены по одной и той же кольцевой поверхности под углом 180° в положении стыковки второго вмещающего сегмента и третьего вмещающего сегмента. Каждый малый приводной модуль содержит платформу приводного механизма, бесщеточный двигатель постоянного тока, редуктор, редуктор конической шестерни первой ступени, приводной вал и магнитное колесо. Бесщеточный двигатель постоянного тока, редуктор, редуктор конической шестерни первой ступени и приводной вал установлены по отдельности на платформе приводного механизма. Конец выдачи мощности бесщеточного двигателя постоянного тока соединен с магнитным колесом после последовательного прохождения через редуктор, редуктор конической шестерни первой ступени и приводной вал.
Каждый направляющий модуль содержит четыре малых направляющих модуля, и малые направляющие модули расположены с взаимно-однозначным соответствием четырем сегментам кожуха. Каждый малый направляющий модуль содержит опору направляющего механизма, пружину растяжения направляющего механизма и направляющее колесо. Направляющее колесо расположено и поддерживается опорой направляющего механизма, а опора направляющего механизма прикреплена к кожуху посредством пружины растяжения направляющего механизма. Пружина растяжения направляющего механизма выполнена из материала сплава с памятью формы. Кроме того, первый вмещающий сегмент и третий вмещающий сегмент имеют форму усеченного конуса, а второй вмещающий сегмент является цилиндрическим. Кожух сформирован в виде овалоподобной конструкции с толстой срединной частью и двумя коническими концами за счет последовательной стыковки первого вмещающего сегмента, второго вмещающего сегмента и третьего вмещающего сегмента.
Другая техническая задача настоящего изобретения заключается в представлении способа преодоления препятствия на основе перемещающегося по тросу роботизированного устройства, выполненного с возможностью переворачивания и описанного выше. Когда корпус роботизированного устройства обнаруживает наличие впереди неисправного роботизированного устройства, приводным модулем, направляющим модулем и механизмом открытия кожуха управляют для того, чтобы корпус роботизированного устройства преодолел неисправное роботизированное устройство. В частности, способ включает следующие этапы:
(1) если корпус роботизированного устройства обнаруживает наличие впереди неисправного роботизированного устройства, то шаговый двигатель вращается для перехода в предварительно затянутое состояние;
(2) бесщеточный двигатель постоянного тока вращается для приведения магнитного колеса во вращение, причем предусмотрен инфракрасный датчик, функционирующий для обнаружения того, имеется ли впереди неисправное роботизированное устройство;
(3) после обнаружения неисправного роботизированного устройства инфракрасным датчиком, бесщеточный двигатель постоянного тока в приводном модуле останавливается и выполняется нагревание торсионной пружины из сплава с памятью формы;
(4) после завершения нагревания торсионной пружины из сплава с памятью формы, бесщеточный двигатель постоянного тока и шаговый двигатель совместно вращаются для преодоления третьего вмещающего сегмента неисправного роботизированного устройства, а после преодоления третьего вмещающего сегмента, шаговый двигатель прекращает вращаться;
(5) когда магнитное колесо достигает первого вмещающего сегмента неисправного роботизированного устройства, шаговый двигатель корпуса роботизированного устройства вращается для складывания ножницеобразных штанг;
(6) после того, как корпус роботизированного устройства полностью преодолел неисправное роботизированное устройство, шаговый двигатель прекращает вращаться, а бесщеточный двигатель постоянного тока продолжает вращаться; и
(7) если определено, что роботизированное устройство достигло специфического положения, то бесщеточный двигатель постоянного тока прекращает вращаться, а шаговый двигатель вращается для предварительного затягивания спирального винта.
Вариант реализации
Ниже в настоящем документе будет подробно описан конкретный вариант реализации настоящего изобретения со ссылкой на сопроводительные чертежи. Как показано на ФИГ. 1 - ФИГ. 5, перемещающееся по тросу роботизированное устройство, выполненное с возможностью преодоления препятствия, согласно настоящему изобретению, содержит корпус роботизированного устройства, причем корпус роботизированного устройства содержит кожух, механизм открытия кожуха, приводной модуль и направляющий модуль.
В положениях посередине на двух концах (верхнем и нижнем концах, показанных на ФИГ. 1) кожуха выполнены сквозные отверстия для направляющего элемента, находящиеся в сообщении друг с другом, для прохождения стального троса или прямой штанги через них, так что корпус роботизированного устройства в нормальном рабочем состоянии может использовать направляющий элемент (например, стальной трос, прямую штангу или другой компонент), который обычно расположен вертикально, для перемещения вдоль указанного выше направляющего элемента благодаря мощности приводного модуля и вспомогательного наведения, обеспечиваемого направляющим модулем.
Для обеспечения корпусу роботизированного устройства по настоящему изобретению возможности преодоления препятствия в ходе перемещения, когда на указанном выше направляющем элементе имеется препятствие (где в основном расположено несколько корпусов роботизированных устройств в продольном направлении направляющего элемента, и когда корпус роботизированного устройства неисправен и не может перемещаться вдоль направляющего элемента, он становится препятствием для других корпусов роботизированного устройства, ползущих за ним), в настоящем изобретении кожух сначала разделяется в продольном направлении на два или более сегментов. Кожух, показанный на ФИГ. 1, равномерно разделен в продольном направлении на четыре сегмента кожуха: первый сегмент кожуха, второй сегмент кожуха, третий сегмент кожуха и четвертый сегмент кожуха. Первый сегмент кожуха, второй сегмент кожуха, третий сегмент кожуха и четвертый сегмент кожуха могут быть расположены последовательно герметично для образования кожуха. Таким образом, механизм открытия кожуха может быть размещен в корпусе для толкания сегментов кожуха изнутри наружу для того, чтобы открыть кожух. При преодолении препятствия, сегменты корпуса роботизированного устройства могут находиться на периферии препятствия, то есть препятствие охватывается в кожухе корпуса роботизированного устройства.
В настоящем изобретении приводной модуль размещен в положении посередине внутренней полости корпус, а также имеется два направляющих модуля: первый направляющий модуль и второй направляющий модуль, которые размещены симметрично с обоих концов приводного модуля. На фигурах первый направляющий модуль расположен на верхнем конце приводного модуля, а второй направляющий модуль расположен на нижнем конце приводного модуля. Приводное колесо приводного модуля может перемещаться вдоль направляющего элемента, и направляющее колесо направляющего модуля также может перемещаться вдоль направляющего элемента.
Ввиду того, что корпус роботизированного устройства перемещается вдоль направляющего элемента постепенно, в ходе открытия сегментов кожуха во всю длину, направляющее колесо первого направляющего модуля, приводное колесо приводного модуля и направляющее колесо второго направляющего модуля в любом случае отдаляются от направляющего элемента одновременно. В результате, приводное колесо приводного модуля отделяется от направляющего элемента перед тем, как дойти до препятствия, и, следовательно, не может использоваться для перемещения. Таким образом, в настоящем изобретении корпус разделен в поперечном направлении на три сегмента: первый вмещающий сегмент, второй вмещающий сегмент и третий вмещающий сегмент. Согласно направлению, показанному на ФИГ. 1, первый вмещающий сегмент расположен сверху, третий вмещающий сегмент расположен снизу, а второй вмещающий сегмент расположен между первым вмещающим сегментом и третьим вмещающим сегментом. В данном случае, четырьмя сегментами кожуха являются: первый сегмент кожуха a, первый сегмент кожуха b, первый сегмент кожуха c и первый сегмент кожуха d, соответственно, в положениях, соответствующих первому вмещающему сегменту; второй сегмент кожуха a, второй сегмент кожуха b, второй сегмент кожуха c и второй сегмент кожуха d, соответственно, в положениях, соответствующих второму вмещающему сегменту; и третий сегмент кожуха a, третий сегмент кожуха b, третий сегмент кожуха c и третий сегмент кожуха d, соответственно, в положениях, соответствующих третьему вмещающему сегменту. Первый сегмент кожуха a, второй сегмент кожуха a и третий сегмент кожуха a могут быть состыкованы для образования первого сегмента кожуха полной длины. Первый сегмент кожуха b, второй сегмент кожуха b и третий сегмент кожуха b могут быть состыкованы для образования второго сегмента кожуха полной длины. Первый сегмент кожуха c, второй сегмент кожуха c и третий сегмент кожуха c могут быть состыкованы для образования третьего сегмента кожуха полной длины. Первый сегмент кожуха d, второй сегмент кожуха d и третий сегмент кожуха d могут быть состыкованы для образования четвертого сегмента кожуха полной длины.
Кроме того, для упрощения преодоления препятствия (неисправного перемещающегося по тросу роботизированного устройства, находящегося впереди) перемещающимся по тросу роботизированным устройством, в настоящем изобретении кожух выполнен овалоподобной формы. В частности, первый вмещающий сегмент и третий вмещающий сегмент имеют форму усеченного конуса. Узкий конец первого вмещающего сегмента находится сверху, а широкий конец первого вмещающего сегмента находится внизу. Широкий конец третьего вмещающего сегмента находится сверху, а узкий конец третьего вмещающего сегмента находится внизу. Второй вмещающий сегмент является цилиндрическим. В узком конце первого вмещающего сегмента и узком конце третьего вмещающего сегмента выполнены сквозные отверстия, находящиеся в сообщении друг с другом, для прохождения направляющего элемента через них. Таким образом, кожух может быть сформирован в виде овалоподобной конструкции с толстой срединной частью и двумя коническими концами за счет последовательной стыковки первого вмещающего сегмента, второго вмещающего сегмента и третьего вмещающего сегмента.
В настоящем изобретении предусмотрено два типа механизма открытия кожуха: первый механизм открытия кожуха и второй механизм открытия кожуха. Предусмотрено два первых механизма открытия кожуха: первый механизм открытия кожуха a и первый механизм открытия кожуха b, которые выполнены с возможностью открытия соответствующего первого вмещающего сегмента и соответствующего третьего вмещающего сегмента, соответственно. Первый механизм открытия кожуха a расположен в кожухе и соответствует положению стыковки первого вмещающего сегмента и второго вмещающего сегмента, а также выполнен с возможностью открытия/закрытия первого вмещающего сегмента. Первый механизм открытия кожуха b расположен в кожухе и соответствует положению стыковки второго вмещающего сегмента и третьего вмещающего сегмента, а также выполнен с возможностью открытия/закрытия третьего вмещающего сегмента. Второй механизм открытия кожуха расположен во втором вмещающем сегменте и выполнен с возможностью открытия/закрытия второго вмещающего сегмента.
Второй механизм открытия кожуха содержит винтовой механизм и ножницеобразные штанги. Винтовой механизм содержит шаговый двигатель, спиральный винт с концом выдачи мощности шагового двигателя, и винтовую гайку, находящуюся в резьбовом штуцерном соединении со спиральным винтом.
Каждый второй сегмент кожуха снабжен одним винтовым механизмом. Ввиду того, что в настоящем изобретении предусмотрено четыре сегмента кожуха (второй сегмент кожуха a, второй сегмент кожуха b, второй сегмент кожуха c и второй сегмент кожуха d), имеется четыре винтовых механизма, которыми являются, соответственно, первый винтовой механизм, второй винтовой механизм, третий винтовой механизм и четвертый винтовой механизм.
Спиральный винт каждого винтового механизма соответствующим образом закреплен в каждом сегменте кожуха, соответствующем второму вмещающему сегменту, вдоль продольного направления кожуха. То есть, спиральный винт первого винтового механизма соответствующим образом закреплен в первом сегменте кожуха, соответствующем второму вмещающему сегменту, спиральный винт второго винтового механизма закреплен во втором сегменте кожуха, соответствующем второму вмещающему сегменту, спиральный винт третьего винтового механизма соответствующим образом закреплен в третьем сегменте кожуха, соответствующем второму вмещающему сегменту, и спиральный винт четвертого винтового механизма соответствующим образом закреплен в четвертом сегменте кожуха, соответствующем второму вмещающему сегменту.
Имеется две ножницеобразные штанги: первая ножницеобразная штанга и вторая ножницеобразная штанга. Каждая ножницеобразная штанга содержит две штанги: штангу a и штангу b. Один конец штанги a первой ножницеобразной штанги неподвижно соединен с концом штанги спирального винта первого винтового механизма, а другой конец штанги a первой ножницеобразной штанги неподвижно соединен с винтовой гайкой третьего винтового механизма. Один конец штанги b первой ножницеобразной штанги неподвижно соединен с концом штанги спирального винта третьего винтового механизма, а другой конец штанги b первой ножницеобразной штанги неподвижно соединен с винтовой гайкой первого винтового механизма. Можно увидеть, что когда шаговый двигатель третьего винтового механизма запущен, штанга a первой ножницеобразной штанги может перемещаться вдоль резьбового винта третьего винтового механизма через винтовую гайку третьего винтового механизма. Когда шаговый двигатель первого винтового механизма запущен, штанга a первой ножницеобразной штанги может перемещаться вдоль резьбового винта первого винтового механизма через винтовую гайку первого винтового механизма. Таким образом, первый сегмент кожуха (первый сегмент кожуха, прикрепленный к первому винтовому механизму) и третий сегмент кожуха (прикрепленный к третьему винтовому механизму), которые соответствуют третьему вмещающему сегменту, могут быть приведены в движение в направлении друг к другу или в направлении друг от друга. Подобным образом, один конец штанги a второй ножницеобразной штанги неподвижно соединен с концом штанги спирального винта второго винтового механизма, а другой конец штанги a второй ножницеобразной штанги неподвижно соединен с винтовой гайкой четвертого винтового механизма; один конец штанги b второй ножницеобразной штанги неподвижно соединен с концом штанги спирального винта четвертого винтового механизма, а другой конец штанги b второй ножницеобразной штанги неподвижно соединен с винтовой гайкой второго винтового механизма. Можно увидеть, что когда шаговый двигатель четвертого винтового механизма запущен, штанга a второй ножницеобразной штанги может перемещаться вдоль резьбового винта четвертого винтового механизма через винтовую гайку четвертого винтового механизма. Когда шаговый двигатель второго винтового механизма запущен, штанга a второй ножницеобразной штанги может перемещаться вдоль резьбового винта второго винтового механизма через винтовую гайку второго винтового механизма. Таким образом, второй сегмент кожуха (прикрепленный ко второму винтовому механизму) и четвертый сегмент кожуха (прикрепленный к четвертому винтовому механизму), которые соответствуют третьему вмещающему сегменту, могут быть приведены в движение в направлении друг к другу или в направлении друг от друга. Резюмируя, согласованная работа шаговых двигателей четырех винтовых механизмов может синхронно открывать/закрывать сегменты кожуха в соответствующих положениях третьего вмещающего сегмента.
Первый механизм открытия кожуха основан на торсионной пружины из сплава с памятью формы и, в частности, содержит двухстороннюю шпильку, торсионную пружину из сплава с памятью формы, платформу для открытия и установки кожуха, пружинную шайбу и гайку.
Каждый сегмент кожуха снабжен одним первым механизмом открытия кожуха a и одним первым механизмом открытия кожуха b. Ввиду наличия четырех сегментов кожуха (первого, второго, третьего и четвертого сегментов кожуха) в настоящем изобретении, имеется восемь первых механизмов открытия кожуха (включающих четыре первых механизма открытия кожуха a и четыре первых механизма открытия кожуха b). Четыре первых механизма открытия кожуха a, соответственно, представляют собой первый механизм открытия кожуха a1, первый механизм открытия кожуха a2, первый механизм открытия кожуха a3 и первый механизм открытия кожуха a4. Один конец каждого из четырех первых механизмов открытия кожуха a неподвижно соединен с резьбовым винтом каждого из четырех винтовых механизмов с взаимно-однозначным соответствием посредством соответствующей платформы для открытия и установки кожуха, а другой конец соответствующим образом соединен, посредством торсионной пружины из сплава с памятью формы, с каждым из четырех сегментов кожуха, размещенных с соответствием первому вмещающему сегменту. В частности, в каждом первом механизме открытия кожуха a платформа для открытия и установки кожуха прикреплена к спиральному винту с помощью болта, торсионная пружина из сплава с памятью формы облегает двухстороннюю шпильку по периферии, и торсионная пружина из сплава с памятью формы имеет торсионное плечо, которое одним концом прикреплено к платформе для открытия и установки кожуха, и торсионное плечо на другом конце, прикрепленном к одному из сегментов кожуха, соответствующему первому вмещающему сегменту. Двухсторонняя шпилька прикреплена к платформе для открытия и установки кожуха с помощью гайки, прилегающей на обоих концах. Кроме того, двухсторонняя шпилька оснащена пружинной шайбой на внешней стороне каждого из двух концов или одном конце торсионной пружины из сплава с памятью формы. Причина использования спирального винта в настоящем изобретении заключается в том, что он обладает свойством самостоятельной блокировки, так что во время приостановки не требуется привод двигателя, а при неисправности двигателя и выключении питания не происходит непреднамеренное падение узловой системы.
Приводной модуль размещен в кожухе и содержит четыре малых приводных модуля. Каждый малый приводной модуль содержит платформу приводного механизма, бесщеточный двигатель постоянного тока, редуктор, редуктор конической шестерни первой ступени, приводной вал и магнитное колесо. Бесщеточный двигатель постоянного тока, редуктор, редуктор конической шестерни первой ступени и приводной вал установлены по отдельности на платформе приводного механизма. Конец выдачи мощности бесщеточного двигателя постоянного тока соединен с магнитным колесом после последовательного прохождения через редуктор, редуктор конической шестерни первой ступени и приводной вал. После выхода источника мощности из бесщеточного двигателя постоянного тока, после снижения скорости и повышения крутящего момента редуктором, мощность выдается на приводной вал после снижения скорости редуктором конической шестерни первой ступени для приведения магнитного колеса во вращение на приводном валу с целью активации корпуса роботизированного устройства для перемещения вдоль направляющего элемента. Сила притяжения между роботизированным устройством и направляющим элементом обеспечивается магнитным колесом.
Четырьмя малыми приводными модулями, соответственно, являются первый малый приводной модуль, второй малый приводной модуль, третий малый приводной модуль и четвертый малый приводной модуль. Первый малый приводной модуль, второй малый приводной модуль, третий малый приводной модуль и четвертый малый приводной модуль расположены в кожухе двумя слоями. Первый малый приводной модуль и третий малый приводной модуль образуют верхний привод приводного модуля и распределены по одной и той же кольцевой поверхности под углом 180° в положении стыковки первого вмещающего сегмента и второго вмещающего сегмента. Второй малый приводной модуль и четвертый малый приводной модуль образуют нижний привод приводного модуля и распределены по одной и той же кольцевой поверхности под углом 180° в положении стыковки второго вмещающего сегмента и третьего вмещающего сегмента. В частности, как показано на ФИГ. 1, первый малый приводной модуль и третий малый приводной модуль расположены на верхнем конце внутренней полости второго вмещающего сегмента, платформа приводного механизма первого малого приводного модуля прикреплена к верхнему концу первого винта, а платформа приводного механизма третьего малого приводного модуля прикреплена к верхнему концу третьего винта. Второй малый приводной модуль и четвертый малый приводной модуль расположены на нижнем конце внутренней полости второго вмещающего сегмента, платформа приводного механизма второго малого приводного модуля прикреплена к нижнему концу второго винта, а платформа приводного механизма четвертого малого приводного модуля прикреплена к нижнему концу четвертого винта. Каждый из нижнего конца первого винта, нижнего конца третьего винта, верхнего конца второго винта и верхнего конца четвертого винта снабжен платформой для размещения источника питания, предназначенной для установки источника питания, и платформой для размещения устройства управления связью, предназначенной для установки контроллера и его устройства связи. Кроме того, второй механизм открытия кожуха расположен между верхним приводом и нижним приводом. Источник питания представляет собой по существу безопасный источник питания, который может выдавать множество значений напряжения для подачи питания на приводную конструкцию, датчик и другие электронные компоненты. Устройство управления связью представляет собой интегральную схемную плату, обладающую функционалом беспроводной связи, GPS-позиционирования, ПИД-регулятора скорости, а также получения и обработки сигнала датчика. Устройство управления связью не является объектом настоящего решения и не будет подробно описано в настоящем документе.
Направляющий модуль в основном служит в качестве направляющей. Предусмотрено два направляющих модуля: первый направляющий модуль и второй направляющий модуль. Первый направляющий модуль расположен в первом вмещающем сегменте, а второй направляющий модуль расположен в третьем вмещающем сегменте. Каждый из первого направляющего модуля и второго направляющего модуля содержит четыре малых направляющих модуля, и малые направляющие модули расположены с соответствием четырем сегментам кожуха, которые могут быть склеены или сварены, или соединены с помощью болтов. Каждый малый направляющий модуль содержит опору направляющего механизма, пружину растяжения направляющего механизма и направляющее колесо. Направляющее колесо расположено и поддерживается опорой направляющего механизма, а опора направляющего механизма прикреплена к кожуху посредством пружины растяжения направляющего механизма. Пружина натяжения направляющего механизма обеспечивает натяжение, так что направляющее колесо не отделяется от стального троса (направляющего элемента). Пружина растяжения направляющего механизма выполнена из материала сплава с памятью формы. Когда перемещение сверху по неисправному роботизированному устройству не требуется, пружина натяжения направляющего механизма не функционирует. Когда необходимо переместиться сверху по неисправному роботизированному устройству, на пружину натяжения направляющего механизма подается питание для активации пружины натяжения направляющего механизма для открытия первого вмещающего сегмента/второго вмещающего сегмента под действием крутящего момента, а также подготовки к переворачиванию.
Как показано на ФИГ. 5, роботизированное устройство работает вдоль стального троса 5, находящегося в узкой и глубокой местности. Роботизированное устройство может иметь три рабочих состояния. В первом состоянии роботизированное устройство не двигается, но подвешено на стальном тросе в качестве узла связи. Во втором состоянии роботизированное устройство должно перемещаться только между двумя соседними роботизированными устройствами. В третьем состоянии роботизированное устройство должно преодолеть неисправное роботизированное устройство. Рассматривая указанные выше три случая, не подлежит сомнению то, что в первом случае управление перемещением роботизированного устройства не требуется, и он может не рассматриваться; во втором случае необходимо рассматривать только активацию (перемещение) бесщеточного двигателя 13 постоянного тока, что относительно просто и может быть рассмотрено в третьем случае; и третий случай является наиболее сложным, управление в нем является относительно сложным, включающим управление бесщеточным двигателем 13 постоянного тока (перемещение), управление шаговым двигателем (преодоление препятствий), управление торсионной пружиной 20 из сплава с памятью формы (подготовка к преодолению препятствия) и управление инфракрасным датчиком (обнаружение препятствия). Таким образом, управление с помощью программного обеспечение выполняется только для третьего случая, представленного здесь.
Способ управления может включать следующие этапы:
(1) Когда сеть беспроводных датчиков, содержащая перемещающееся по тросу роботизированное устройство, расположенное на стальном тросу, не может нормально функционировать, система управляет перемещающимся по тросу роботизированным устройством в соответствии с состоянием неисправности. Шаговый двигатель находится в предварительно затянутом состоянии во время подвешивания. Когда перемещающееся по тросу роботизированное устройство принимает сигнал о преодолении препятствия, шаговый двигатель вращается для выхода из предварительно затянутого состояния.
(2) В это время вращается бесщеточный двигатель постоянного тока для приведения магнитного колеса во вращение, причем предусмотрен инфракрасный датчик, функционирующий для обнаружения того, имеется ли впереди неисправное роботизированное устройство.
(3) После обнаружения неисправного роботизированного устройства инфракрасным датчиком, бесщеточный двигатель постоянного тока прекращает вращаться и выполняется нагревание торсионной пружины из сплава с памятью формы.
(4) После завершения нагревания, бесщеточный двигатель постоянного тока и шаговый двигатель совместно вращаются для преодоления нижнего направляющего механизма кожуха неисправного роботизированного устройства, и после завершения преодоления, шаговый двигатель прекращает вращаться.
(5) После достижения магнитным колесом верхнего направляющего механизма кожуха (первого сегмента кожуха) неисправного роботизированного устройства, шаговый двигатель вращается для складывания ножницеобразных штанг.
(6) После того, как неисправное роботизированное устройство было полностью преодолено, шаговый двигатель прекращает вращаться, а бесщеточный двигатель постоянного тока продолжает вращаться.
(7) Если определено, что роботизированное устройство достигло специфического положения, то бесщеточный двигатель постоянного тока прекращает вращаться, а шаговый двигатель вращается для предварительного затягивания спирального винта.
(8) Весь процесс перемещения роботизированного устройства по тросу завершается.
Способ применения перемещающегося по тросу роботизированного устройства, выполненного с возможностью преодоления препятствия, согласно настоящему изобретению, заключается в следующем:
Первым этапом является фаза установки. Сначала необходимо определить диаметр арочной внешней поверхности магнитного колеса, согласно диаметру стального троса, выбрать датчик, который необходимо установить, закрепить датчик и камеру на погрузочной платформе роботизированного устройства, и выполнить канальное соединение при необходимости. Необходимо собрать приводной модуль, механизм открытия, направляющий модуль, кожух, модуль подачи питания и модуль связи, затем установить срединную часть роботизированного устройства на стальном тросе, согласно указанным выше этапам, а затем отдельно соединить верхние и нижние части роботизированного устройства со срединным модулем кожуха путем использования того же способа.
Вторым этапом является фаза исправление ошибок. Необходимо соединить модуль подачи питания, модуль управления связью и приводной модуль для проверки того, работают ли надлежащим образом приводной модуль и датчик, проверки нормальных функций перемещения, свисания, спуска и преодоления препятствия у роботизированного устройства на стальном тросе, а также обеспечения того, чтобы магнитное колесо роботизированного устройства не сошло со стального троса в ходе работы.
Третьим этапом является формальная фаза работы. Наземный центр управления посылает команды старта и прохода, а модуль управления связью принимает команды и управляет роботизированным устройством для его перемещения с заданной скоростью. Кроме того, наземный центр управления проверяет данные, передаваемые датчиками, например, для обнаружения остаточной мощности в модуле подачи питания, работает ли нормально роботизированное устройство, а также информацию, такую как температура и влажность внутри ствола скважины.
Представленное выше описание относится лишь к предпочтительным вариантам реализации настоящего изобретения. Следует отметить, что специалист в данной области техники также может выполнить некоторые улучшения и модификации, не выходя за рамки замысла настоящего изобретения. Эти улучшения и модификации также следует понимать, как входящие в объем защиты настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автономный мобильный модуль роботизированного хирургического инструмента | 2019 |
|
RU2715684C1 |
| СПОСОБ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ /ВАРИАНТЫ/ | 2014 |
|
RU2577748C1 |
| СИСТЕМА ОБСЛЕДОВАНИЯ ШАХТНОГО СТВОЛА С СИНХРОНИЗАЦИЕЙ ДВИЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ЕЮ С СИНХРОНИЗАЦИЕЙ ДВИЖЕНИЯ | 2019 |
|
RU2752055C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ | 2014 |
|
RU2554270C1 |
| УСТРОЙСТВО ДЛЯ ПЕРИОДИЧЕСКОГО КОНТРОЛЯ ЖЕСТКОЙ НАПРАВЛЯЮЩЕЙ ДЛЯ КЛЕТИ | 2016 |
|
RU2693370C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ | 2015 |
|
RU2606915C2 |
| СПОСОБ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ - 2 | 2015 |
|
RU2578447C1 |
| СЕКЦИОННЫЙ ТРАНСПОРТЕР ДЛЯ ПЕРЕМЕЩЕНИЯ СЫПУЧИХ МАТЕРИАЛОВ ЧЕРЕЗ ПРОСТРАНСТВА С ПРЕПЯТСТВИЯМИ И СПОСОБ ОСУЩЕСТВЛЕНИЯ ТРАНСПОРТИРОВКИ СЫПУЧИХ МАТЕРИАЛОВ | 2015 |
|
RU2602156C2 |
| Способ и устройство для обхода препятствий роботом-уборщиком, носитель информации и электронное оборудование | 2021 |
|
RU2826126C1 |
| Колесная система опорная и приводная для преодоления габаритных препятствий | 2020 |
|
RU2747312C1 |
Группа изобретений относится к области транспортного машиностроения. Перемещающееся по тросу роботизированное устройство содержит корпус роботизированного устройства, перемещающийся вдоль направляющего элемента и имеющий кожух, приводной модуль и направляющий модуль. Кожух разделен в продольном направлении на четное количество сегментов кожуха. В кожухе также установлены механизмы открытия кожуха, содержащие платформу, торсионную пружину из сплава с памятью формы, ножницеобразные штанги и регулировочный механизм. Способ преодоления препятствия перемещающимся по тросу роботизированным устройством включает этапы: обнаруживают наличие впереди неисправного роботизированного устройства; бесщеточный двигатель постоянного тока вращается для приведения магнитного колеса во вращение; бесщеточный двигатель постоянного тока и шаговый двигатель совместно вращаются для преодоления неисправного роботизированного устройства; после преодоления неисправного роботизированного устройства шаговый двигатель прекращает вращаться. Достигается автономность работы роботизированных устройств. 2 н. и 8 з.п. ф-лы, 5 ил.
1. Перемещающееся по тросу роботизированное устройство, выполненное с возможностью переворачивания и содержащее корпус роботизированного устройства, причем корпус роботизированного устройства выполнен с возможностью перемещения вдоль направляющего элемента и содержит кожух, приводной модуль и направляющий модуль; и в положениях посередине на двух концах кожуха выполнены сквозные отверстия, находящиеся в сообщении друг с другом, для прохождения направляющего элемента через них, и приводной модуль и направляющий модуль установлены в кожухе отдельно вдоль продольного направления направляющего элемента, причем кожух разделен в продольном направлении на четное количество сегментов кожуха, а также он разделен в поперечном направлении на соответствующий приводной вмещающий сегмент и соответствующий направляющий вмещающий сегмент, согласно положениям установки приводного модуля и направляющего модуля в кожухе, предусмотрен по меньшей мере один направляющий модуль и по меньшей мере один направляющий вмещающий сегмент, и в кожухе также установлен механизм открытия кожуха;
механизм открытия кожуха содержит первый механизм открытия кожуха, выполненный с возможностью открытия/закрытия направляющего вмещающего сегмента, и второй механизм открытия, выполненный с возможностью открытия/закрытия приводного вмещающего сегмента;
каждый сегмент кожуха, соответствующий каждому направляющему вмещающему сегменту, снабжен одним первым механизмом открытия кожуха; взаимодействие первых механизмов открытия кожуха может обеспечивать открытие/закрытие сегмента кожуха, соответствующего направляющему вмещающему сегменту в кожухе, и каждый первый механизм открытия кожуха содержит платформу для открытия и установки кожуха, а также торсионную пружину из сплава с памятью формы; и торсионная пружина из сплава с памятью формы установлена на платформе для открытия и установки кожуха, и платформа для открытия и установки кожуха имеет торсионное плечо на одном конце, прикрепленном к платформе для открытия и установки кожуха, а также торсионное плечо на другом конце, прикрепленном к одному из сегментов кожуха, соответствующему направляющему вмещающему сегменту; и
второй механизм открытия кожуха может открывать/закрывать два сегмента кожуха, расположенные под углом 180°, соответствующие приводному вмещающему сегменту в кожухе, и содержит ножницеобразные штанги и регулировочный механизм, который синхронно толкает ножницеобразные штанги для перемещения в том же направлении для осуществления открытия/закрытия ножницеобразных штанг; регулировочный механизм содержит два линейных приводных механизма, и неподвижные части двух линейных приводных механизмов соответствующим образом установлены в сегментах кожуха, расположенных под углом 180°; оба конца каждой из двух штанг в ножницеобразной штанге соединены между неподвижной частью одного из двух линейных приводных механизмов и силового приводного конца другого линейного приводного механизма; и платформа для открытия и установки кожуха прикреплена к неподвижной части линейного приводного механизма второго механизма открытия кожуха.
2. Устройство по п.1, отличающееся тем, что предусмотрено два направляющих модуля: первый направляющий модуль и второй направляющий модуль, которые отдельно расположены с двух сторон приводного модуля вдоль продольного направления направляющего элемента; кожух разделен в поперечном направлении на три сегмента: последовательно, первый вмещающий сегмент, второй вмещающий сегмент и третий вмещающий сегмент; первый вмещающий сегмент и третий вмещающий сегмент являются направляющими сегментами корпуса, первый направляющий модуль установлен в первом вмещающем сегменте, а второй направляющий модуль установлен в третьем вмещающем сегменте; и второй вмещающий сегмент представляет собой приводной вмещающий сегмент.
3. Устройство по п.2, отличающееся тем, что кожух разделен в продольном направлении на четыре сегмента кожуха: первый сегмент кожуха, второй сегмент кожуха, третий сегмент кожуха и четвертый сегмент кожуха.
4. Устройство по п.3, отличающееся тем, что линейный приводной механизм представляет собой винтовой механизм, содержащий шаговый двигатель, спиральный винт, соединенный с концом выдачи мощности шагового двигателя, и винтовую гайку, находящуюся в резьбовом штуцерном соединении со спиральным винтом; спиральный винт каждого винтового механизма соответствующим образом закреплен в каждом сегменте кожуха, соответствующем второму вмещающему сегменту, вдоль продольного направления кожуха; платформа для открытия и установки кожуха прикреплена к спиральному винту с помощью болта.
5. Устройство по п.3, отличающееся тем, что первый механизм открытия кожуха дополнительно содержит двухстороннюю шпильку, пружинную шайбу и гайку; двухсторонняя шпилька прикреплена к платформе для открытия и установки кожуха с помощью гайки, прилегающей на обоих концах; и торсионная пружина из сплава с памятью формы облегает двухстороннюю шпильку по периферии, а двухсторонняя шпилька оснащена пружинной шайбой на внешней стороне каждого из двух концов или одном конце торсионной пружины из сплава с памятью формы.
6. Устройство по п.3, отличающееся тем, что приводной модуль расположен в кожухе и содержит четыре малых приводных модуля: первый малый приводной модуль, второй малый приводной модуль, третий малый приводной модуль и четвертый малый приводной модуль; и первый малый приводной модуль, второй малый приводной модуль, третий малый приводной модуль и четвертый малый приводной модуль расположены в кожухе двумя слоями; и первый малый приводной модуль и третий малый приводной модуль образуют верхний привод приводного модуля и распределены по одной и той же кольцевой поверхности под углом 180° в положении стыковки первого вмещающего сегмента и второго вмещающего сегмента; и второй малый приводной модуль и четвертый малый приводной модуль образуют нижний привод приводного модуля и распределены по одной и той же кольцевой поверхности под углом 180° в положении стыковки второго вмещающего сегмента и третьего вмещающего сегмента.
7. Устройство по п.6, отличающееся тем, что каждый малый приводной модуль содержит платформу приводного механизма, бесщеточный двигатель постоянного тока, редуктор, редуктор конической шестерни первой ступени, приводной вал и магнитное колесо; бесщеточный двигатель постоянного тока, редуктор, редуктор конической шестерни первой ступени и приводной вал установлены по отдельности на платформе приводного механизма, а конец выдачи мощности бесщеточного двигателя постоянного тока соединен с магнитным колесом после последовательного прохождения через редуктор, редуктор конической шестерни первой ступени и приводной вал.
8. Устройство по п.6, отличающееся тем, что каждый направляющий модуль содержит четыре малых направляющих модуля, и малые направляющие модули расположены с соответствием четырем сегментам кожуха; каждый малый направляющий модуль содержит опору направляющего механизма, пружину растяжения направляющего механизма и направляющее колесо, направляющее колесо расположено и поддерживается опорой направляющего механизма, а опора направляющего механизма прикреплена к кожуху посредством пружины растяжения направляющего механизма; и пружина растяжения направляющего механизма выполнена из материала сплава с памятью формы.
9. Устройство по п.2, отличающееся тем, что первый вмещающий сегмент и третий вмещающий сегмент имеют форму усеченного конуса, а второй вмещающий сегмент является цилиндрическим; и кожух сформирован в виде овалоподобной конструкции с толстой срединной частью и двумя коническими концами за счет последовательной стыковки первого вмещающего сегмента, второго вмещающего сегмента и третьего вмещающего сегмента.
10. Способ преодоления препятствия на основе перемещающегося по тросу роботизированного устройства, выполненного с возможностью переворачивания, по п.1, при котором, когда корпус роботизированного устройства обнаруживает наличие впереди неисправного роботизированного устройства, приводным модулем, направляющим модулем и механизмом открытия кожуха управляют для того, чтобы корпус роботизированного устройства преодолел неисправное роботизированное устройство, при этом способ, в частности, включает следующие этапы:
(1) если корпус роботизированного устройства обнаруживает наличие впереди неисправного роботизированного устройства, то шаговый двигатель вращается для перехода в предварительно затянутое состояние;
(2) бесщеточный двигатель постоянного тока вращается для приведения магнитного колеса во вращение, причем предусмотрен инфракрасный датчик, функционирующий для обнаружения того, имеется ли впереди неисправное роботизированное устройство;
(3) после обнаружения неисправного роботизированного устройства инфракрасным датчиком, бесщеточный двигатель постоянного тока в приводном модуле останавливается и выполняется нагревание торсионной пружины из сплава с памятью формы;
(4) после завершения нагревания торсионной пружины из сплава с памятью формы, бесщеточный двигатель постоянного тока и шаговый двигатель совместно вращаются для преодоления третьего вмещающего сегмента неисправного роботизированного устройства, а после преодоления третьего вмещающего сегмента, шаговый двигатель прекращает вращаться;
(5) когда магнитное колесо достигает первого вмещающего сегмента неисправного роботизированного устройства, шаговый двигатель корпуса роботизированного устройства вращается для складывания ножницеобразных штанг;
(6) после того, как корпус роботизированного устройства полностью преодолел неисправное роботизированное устройство, шаговый двигатель прекращает вращаться, а бесщеточный двигатель постоянного тока продолжает вращаться; и
(7) если определено, что роботизированное устройство достигло специфического положения, то бесщеточный двигатель постоянного тока прекращает вращаться, а шаговый двигатель вращается для предварительного затягивания спирального винта.
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО НАКЛОННЫМ И ВЕРТИКАЛЬНЫМ ПОВЕРХНОСТЯМ | 2003 |
|
RU2267434C2 |
| EP 3077279 B1, 18.07.2018 | |||
| US 8505461 B2, 13.08.2013 | |||
| US 9573602 B2, 21.02.2017 | |||
| СПОСОБ ПОЛУЧЕНИЯ МОДИФИЦИРОВАННОГО ВОЛОКНА НА ОСНОВЕ ТРИАЦЕТАТА ЦЕЛЛЮЛОЗЫ | 0 |
|
SU193020A1 |

