Область техники, к которой относится изобретение
Изобретение относится к области реконфигурируемых мобильных роботов и может быть использовано в различных областях промышленности и народного хозяйства в целях обследования территории, доставки грузов, а также проведения различных работ при помощи сменных рабочих инструментов и схватов.
Уровень техники
Из уровня техники известны реконфигурируемые роботы, способные менять свою конфигурацию для движения по различным типам местности [Кадочников М.В. Модели, алгоритмы и программное обеспечение систем управления мехатронно-модульными роботами с адаптивной кинематической структурой / Дис. канд. техн. наук. - М.: МИРЭА, 2009. - 190 с.; Liu С. et al. Parallel Self-Assembly with SMORES-EP, a Modular Robot (интернет-ресурс: https://www.modlabupenn.org/wp-content/uploads/2020/06/liu_smores_assembly_2020.pdf)].
Недостатками таких систем являются:
- низкая скорость перемещения;
- трудность преодоления препятствий, сравнимых по высоте с размером робота, так как для этого требуется, чтобы каждое из звеньев было способно поднять массу приводов и аккумуляторов всех остальных звеньев;
- трудности с транспортировкой груза.
Также из уровня техники известны моноколеса, способные удерживать равновесие, поворачиваться, а также передвигаться с большой скоростью [FR 2937124 А1, опубликован 16.04.2010; US 7337862 В1, опубликован 04.03.2008; US 8219308 В2, опубл. 10.07.2012].
Недостатком данных систем является ограничение по проходимости:
- трудности с преодолением препятствий, сравнимых по высоте с радиусом колеса;
- трудности с преодолением провалов.
Раскрытие сущности изобретения
Предлагаемая группа изобретений направлена на решение технической задачи по устранению недостатков известных технических решений.
Достигаемый при этом технический результат заключается в создании робота, способного передвигаться с высокой скоростью и прокладывать себе путь через препятствия, при этом перевозя грузы, и выполнять различные действия рабочими инструментами.
Технический результат достигается тем, что гетерогенный модульный реконфигурируемый мобильный робот состоит из цепи мехатронных модулей, оснащенной с двух сторон андрогинными стыковочными узлами, платформы с системой удержания равновесия и выдвижными опорами, двигающейся вдоль цепи мехатронных модулей, и сменных рабочих инструментов и схватов с андрогинными стыковочными узлами, присоединяемых к цепи мехатронных модулей или располагаемых на платформе с системой удержания равновесия.
Технический результат также достигается способом перемещения предложенного гетерогенного модульного реконфигурируемого мобильного робота, в соответствии с которым андрогинные стыковочные узлы замыкают цепь мехатронных модулей в кольцо, и платформа с системой удержания равновесия движется внутри образованного кольца в режиме моноколеса либо платформа с системой удержания равновесия движется вдоль разомкнутой цепи мехатронных модулей.
В одном из вариантов осуществления способа перемещения гетерогенного модульного реконфигурируемого мобильного робота, формирование кольца либо разомкнутой цепи мехатронных модулей осуществляют из цепей мехатронных модулей двух и более гетерогенных модульных реконфигурируемых мобильных роботов.
Технический результат также достигается способом перемещения грузов предложенным гетерогенным модульным реконфигурируемым мобильным роботом, в соответствии с которым груз размещают на платформе с системой удержания равновесия в режиме моноколеса, либо груз перемещают сменные рабочие инструменты и схваты, присоединенные к концам цепи мехатронных модулей андрогинными стыковочными узлами, либо груз перемещают на платформе с системой удержания равновесия, движущейся вдоль разомкнутой цепи мехатронных модулей с осуществлением погрузочно-разгрузочных работ гетерогенным модульным реконфигурируемым мобильным роботом при помощи сменных рабочих инструментов и схватов.
В одном из вариантов осуществления способа перемещения грузов, одновременно используют сменные рабочие инструменты и схваты двух и более гетерогенных модульных реконфигурируемых мобильных роботов.
В еще одном из вариантов осуществления способа перемещения грузов, формирование кольца либо разомкнутой цепи мехатронных модулей осуществляют из цепей мехатронных модулей двух и более мобильных гетерогенных модульных реконфигурируемых мобильных роботов.
В еще одном варианте осуществления способа перемещения грузов, погрузочно-разгрузочные работы дополнительно осуществляют, в том числе, другими гетерогенными модульными реконфигурируемыми мобильными роботам при помощи их сменных рабочих инструментов и схватов, присоединенных к концам их цепей мехатронных модулей андрогинными стыковочными узлами.
Краткое описание чертежей
Группа изобретений поясняется чертежами.
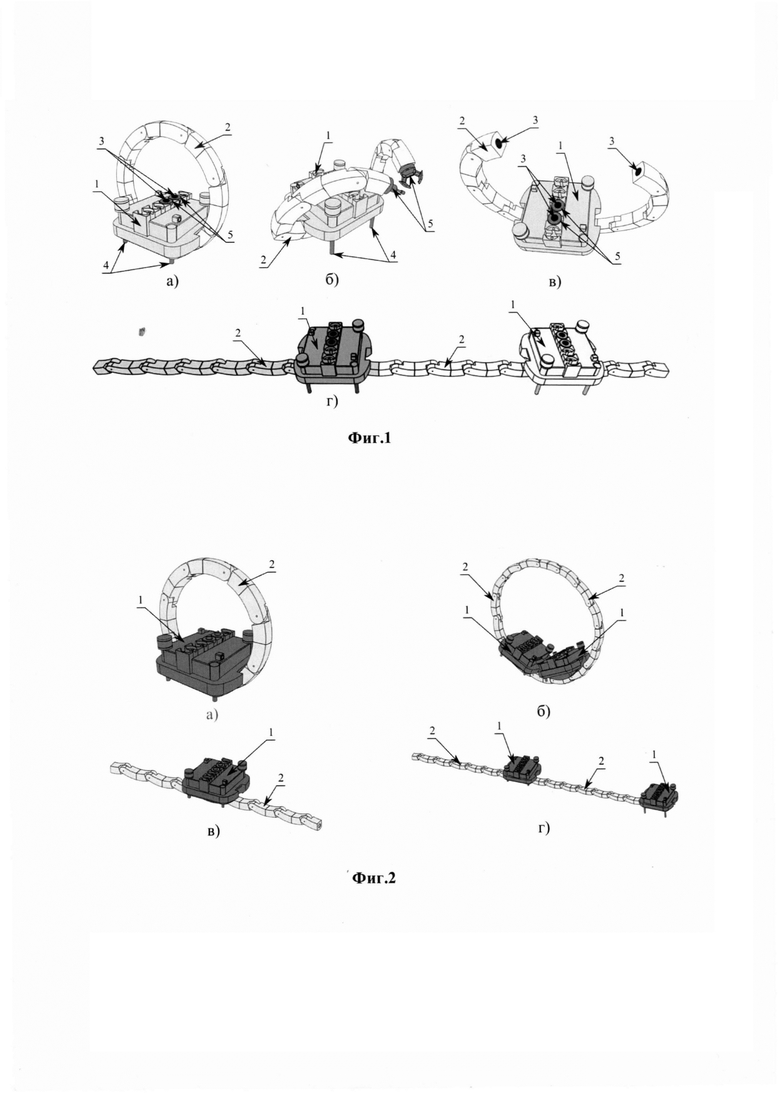
На фиг. 1 показан вид гетерогенного модульного реконфигурируемого мобильного робота в различных конфигурациях. Он состоит из платформы с системой удержания равновесия 1, цепи мехатронных модулей 2, андрогинных стыковочных узлов 3, выдвижных опор 4 и сменных рабочих инструментов и схватов 5 (а - моноколесо; б - использование сменных рабочих инструментов и схватов; в - переходная стадия от замкнутой к разомкнутой цепи мехатронных модулей; г - соединение цепей мехатронных модулей двух гетерогенных модульных реконфигурируемых мобильных роботов).
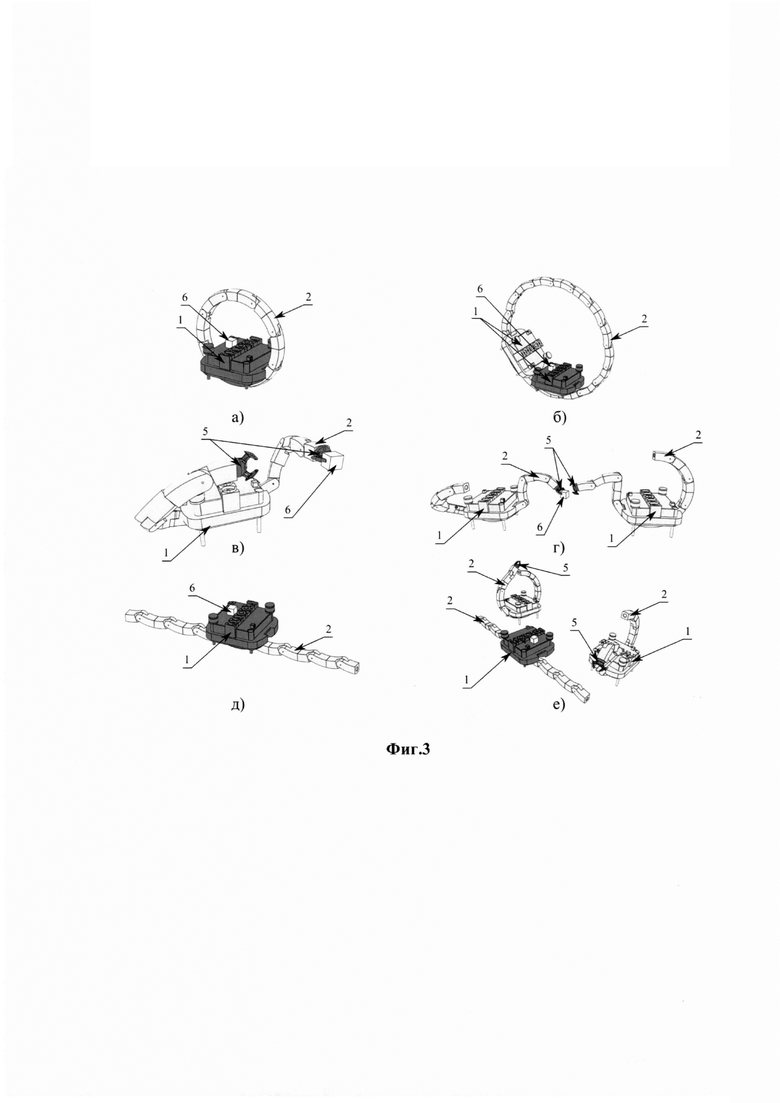
На фиг. 2 показаны способы перемещения гетерогенного модульного реконфигурируемого мобильного робота (а - моноколесо; б - моноколесо, собранное из двух гетерогенных модульных реконфигурируемых мобильных роботов; в - перемещение платформы с системой удержания равновесия вдоль разомкнутой цепи мехатронных модулей; г - перемещение платформы с системой удержания равновесия вдоль разомкнутых соединенных цепей мехатронных модулей двух гетерогенных модульных реконфигурируемых мобильных роботов).
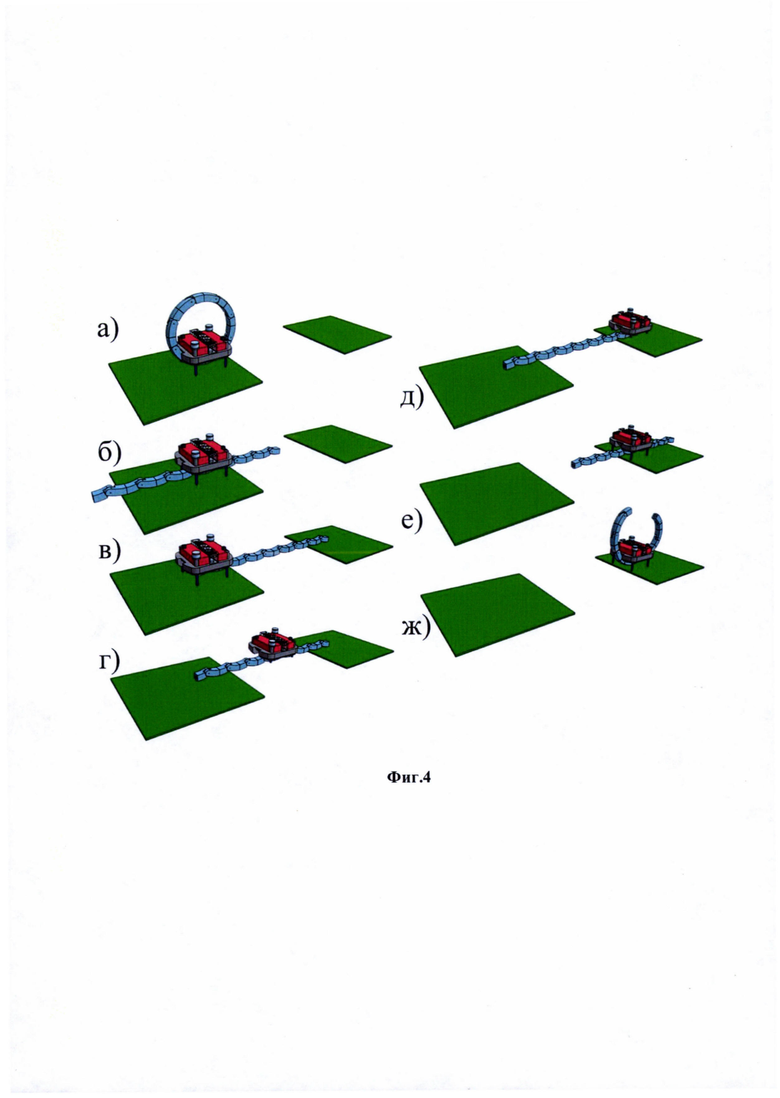
На фиг. 3 показаны способы перемещения грузов 6 гетерогенным модульным реконфигурируемым мобильным роботом (а - моноколесом; б - моноколесом, собранным из двух гетерогенных модульных реконфигурируемых мобильных роботов; в - сменными рабочими инструментами и схватами; г - сменными рабочими инструментами и схватами двух гетерогенных реконфигурируемых мобильных роботов; д - вдоль разомкнутой цепи мехатронных модулей; е - группой гетерогенных модульных реконфигурируемых мобильных роботов).
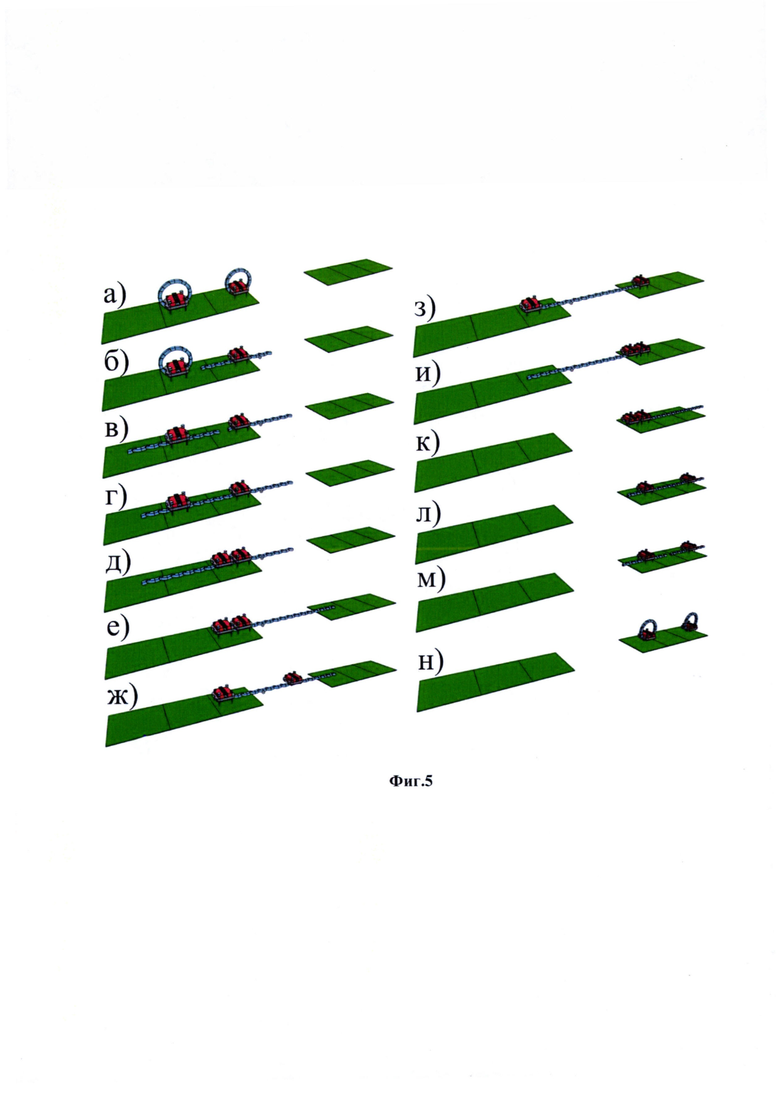
На фиг. 4 показано преодоление гетерогенным модульным реконфигурируемым мобильным роботом провала.
На фиг. 5 показано преодоление гетерогенным модульным реконфигурируемым мобильным роботом провала при использовании двух гетерогенных модульных реконфигурируемых мобильных роботов для создания моста.
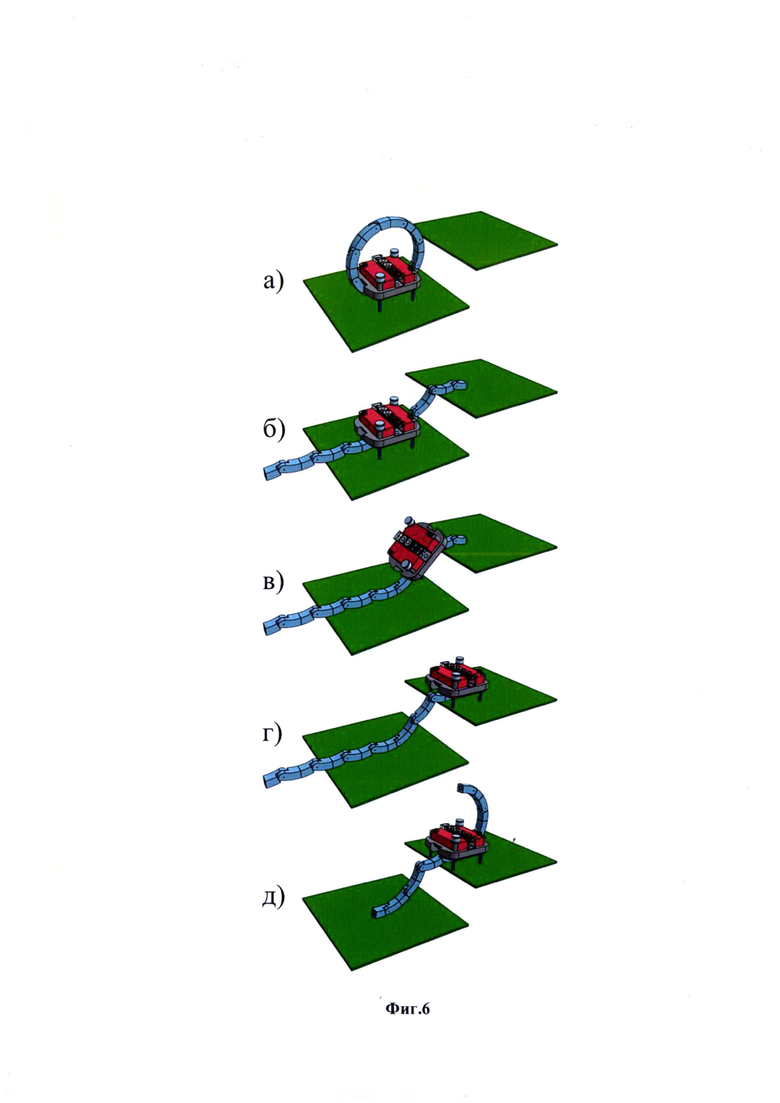
На фиг. 6 показан подъем гетерогенного модульного реконфигурируемого мобильного робота на ступеньку.
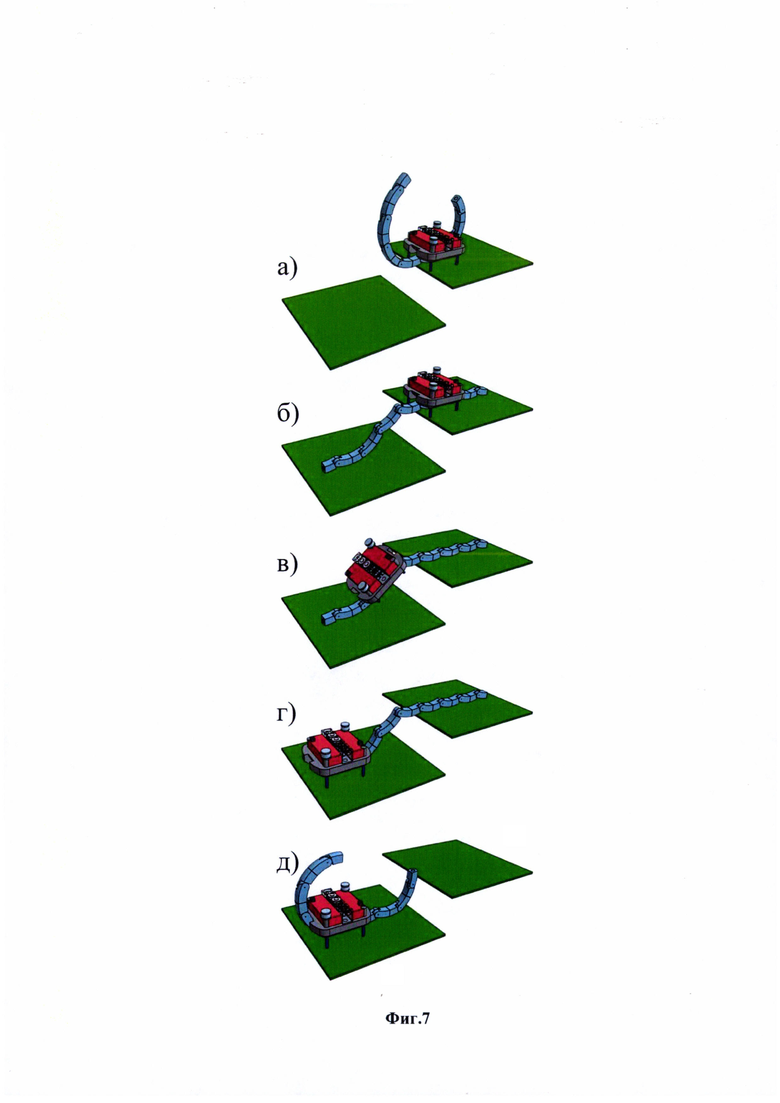
На фиг. 7 показан спуск гетерогенного модульного реконфигурируемого мобильного робота со ступеньки.
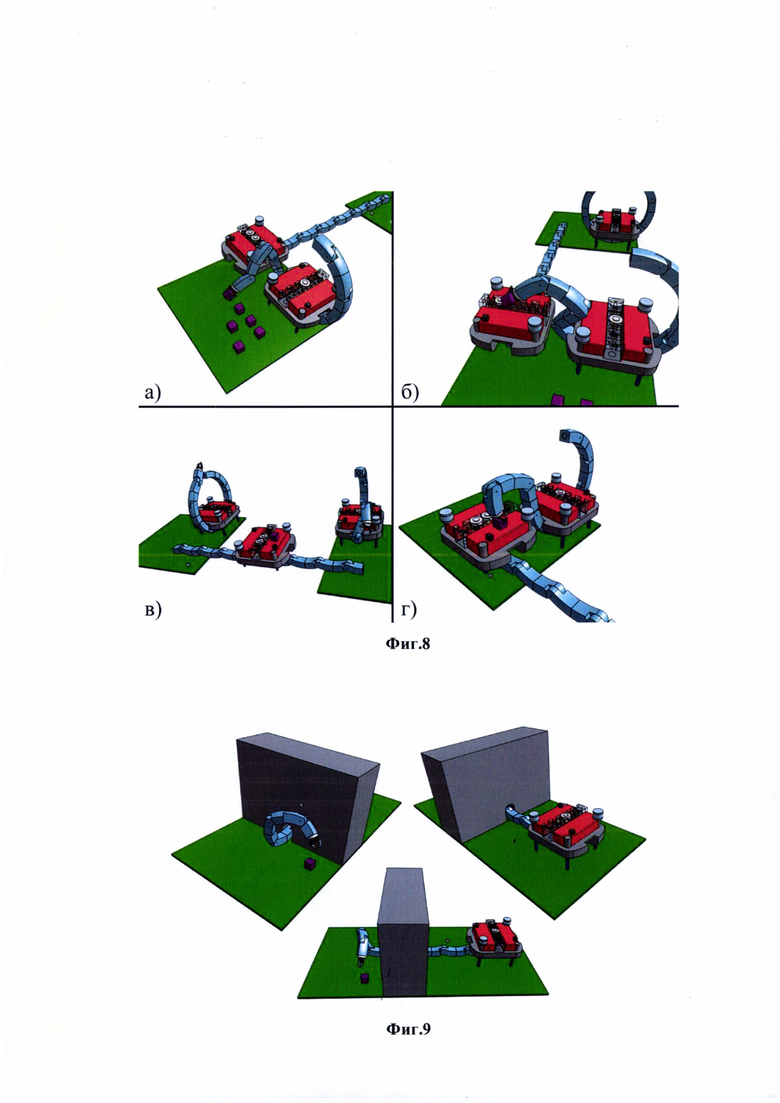
На фиг. 8 показана транспортировка грузов через провал с использованием трех гетерогенных модульных реконфигурируемых мобильных роботов.
На фиг. 9 показано использование цепи мехатронных модулей для применения сменных рабочих инструментов и схватов в труднодоступных местах.
Осуществление изобретения
Работает устройство следующим образом.
Для движения в режиме моноколеса цепь мехатронных модулей 2 (от одного или нескольких гетерогенных модульных реконфигурируемых мобильных роботов) замыкается в кольцо андрогинными стыковочными узлами 3, после чего платформа с системой удержания равновесия 1 (либо несколько таких платформ) движется внутри образованного кольца, обеспечивая движение, балансировку и маневрирование как моноколесо (фиг. 1 а, б).
Для движения вдоль разомкнутой цепи мехатронных модулей 2 (от одного или нескольких гетерогенных модульных реконфигурируемых мобильных роботов) андрогинный стыковочные узлы 3 размыкают цепь каждого из гетерогенных модульных реконфигурируемых мобильных роботов, а затем соединяют цепи мехатронных модулей 2 вместе, после чего платформа с системой удержания равновесия 1 (либо несколько таких платформ) движется вдоль образованной цепи мехатронных модулей 2 (фиг. 1 в, г).
Для перемещения грузов, груз 6 размещается на платформе с системой удержания равновесия 1 либо перемещается рабочими инструментами и схватами 5 одного или нескольких гетерогенных модульных реконфигурируемых мобильных роботов.
Для преодоления провала гетерогенный модульный реконфигурируемый мобильный робот подъезжает к краю провала, вывешивается на выдвижных опорах 4 (фиг. 4а), прокручивает замкнутую цепь мехатронных модулей 2 таким образом, чтобы ее точка замыкания оказалась строго сверху, производит размыкание андрогинных стыковочных узлов 3, разворачивает цепь мехатронных модулей 2 в прямую (фиг. 4б) и перемещает ее в направлении провала. После того как конец цепи мехатронных модулей 2 заходит на противоположную сторону провала на расстояние, равное длине платформы с системой удержания равновесия 1 (фиг. 4в), гетерогенный модульный реконфигурируемый мобильный робот убирает выдвижные опоры 4 и перемещает платформу с системой удержания равновесия 1 вдоль цепи мехатронных модулей 2 на противоположную сторону провала (фиг. 4 г, д). После этого гетерогенный модульный реконфигурируемый мобильный робот снова вывешивается на выдвижных опорах 4, втягивает цепь мехатронных модулей 2 так, чтобы платформа с системой удержания равновесия 1 оказалась над ее серединой (фиг. 4е), замыкает (фиг. 4ж) цепь мехатронных модулей 2 в кольцо при помощи андрогинных стыковочными узлов 3, втягивает выдвижные опоры 4 и продолжает движения в режиме моноколеса.
Для преодоления провала группой гетерогенных модульных реконфигурируемых мобильных роботов, например двумя, первый гетерогенный модульный реконфигурируемый мобильный робот подъезжает в режиме моноколеса к краю провала (фиг. 5а), вывешивается на выдвижных опорах 4, прокручивает замкнутую цепь мехатронных модулей 2 таким образом, чтобы ее точка замыкания оказалась строго сверху, производит размыкание андрогинных стыковочных узлов 3, разворачивает цепь мехатронных модулей 2 в прямую и перемещает ее в направлении провала (фиг. 5б). Второй гетерогенный модульный реконфигурируемый мобильный робот подъезжает в режиме моноколеса в точку, расположенную по продольной оси первого гетерогенного модульного реконфигурируемого мобильного робота, вывешивается на выдвижных опорах 4, прокручивает замкнутую цепь мехатронных модулей 2 таким образом, чтобы ее точка замыкания оказалась строго сверху, производит размыкание андрогинных стыковочных узлов 3, разворачивает цепь мехатронных модулей 2 в прямую (фиг. 5в) и перемещает ее в направлении первого гетерогенного модульного реконфигурируемого мобильного робота, пока цепи мехатронных модулей 2 не сойдутся (фиг. 5г), после чего производится соединение цепей мехатронных модулей 2 при помощи андрогинных стыковочных узлов 3. Второй гетерогенный модульный реконфигурируемый мобильный робот втягивает выдвижные опоры 4 и перемещает свою платформу с системой удержания равновесия 1 до платформы с системой удержания равновесия 1 первого гетерогенного модульного реконфигурируемого мобильного робота (фиг. 5д), и вывешивается на выдвижных опорах 4. Затем оба гетерогенных модульных реконфигурируемых мобильных робота перемещают соединенные цепи мехатронных модулей 2 в направлении провала. После того как конец цепи мехатронных модулей 2 заходит на противоположную сторону провала на расстояние, равное двум длинам платформы с системой удержания равновесия 1 (фиг. 5е), первый гетерогенный модульный реконфигурируемый мобильный робот убирает выдвижные опоры 4 и перемещает платформу с системой удержания равновесия 1 вдоль соединенных цепей мехатронных модулей 2 на противоположную сторону провала (фиг. 5ж), где вывешивается на выдвижных опорах 4 (фиг. 5з). После этого второй гетерогенный модульный реконфигурируемый мобильный робот убирает выдвижные опоры 4 и перемещает платформу с системой удержания равновесия 1 вдоль соединенных цепей мехатронных модулей 2 на противоположную сторону провала (фиг. 5и), где вывешивается на выдвижных опорах 4. Оба гетерогенных модульных реконфигурируемых мобильных робота втягивают соединенные цепи мехатронных модулей 2 так, чтобы они полностью оказались на той же стороне провала, что и платформы с системой удержания равновесия 1 (фиг. 5к), после чего убирают выдвижные опоры 4 и перемещают платформы с системой удержания равновесия 1 на середины цепей мехатронных модулей 2 и снова вывешиваются на выдвижных опорах 4 (фиг. 5л). Гетерогенные модульные реконфигурируемые мобильные роботы размыкают цепи мехатронных модулей 2 (фиг. 5м), каждый из них замыкает свою цепь мехатронных модулей 2 в кольцо при помощи андрогинных стыковочными узлов 3, втягивает выдвижные опоры 4 и продолжает движение в режиме моноколеса (фиг. 5н).
Для подъема на ступеньку гетерогенный модульный реконфигурируемый мобильный робот подъезжает к ступеньке, вывешивается на выдвижных опорах 4 (фиг. 6а), прокручивает замкнутую цепь мехатронных модулей 2 таким образом, чтобы ее точка замыкания оказалась строго сверху, производит размыкание андрогинных стыковочных узлов 3, разворачивает цепь мехатронных модулей 2 так, чтобы один ее конец лег на ступеньку (фиг. 6б). Затем гетерогенный модульный реконфигурируемый мобильный робот убирает выдвижные опоры 4 и перемещает платформу с системой удержания равновесия 1 вдоль цепи мехатронных модулей 2 наверх на ступеньку (фиг. 6в). Там гетерогенный модульный реконфигурируемый мобильный робот вывешивается на выдвижных опорах 4 (фиг. 6г) и втягивает цепь мехатронных модулей 2 (фиг. 6д), замыкает ее в кольцо при помощи андрогинных стыковочных узлов 3, втягивает выдвижные опоры 4 и продолжает движение в режиме моноколеса.
Для спуска со ступеньки гетерогенный модульный реконфигурируемый мобильный робот подъезжает к краю ступеньки, вывешивается на выдвижных опорах 4, прокручивает замкнутую цепь мехатронных модулей 2 таким образом, чтобы ее точка замыкания оказалась строго сверху, производит размыкание андрогинных стыковочных узлов 3 (фиг. 7а), разворачивает цепь мехатронных модулей 2 так, чтобы один ее конец лег на пол перед ступенькой (фиг. 7б). Затем гетерогенный модульный реконфигурируемый мобильный робот убирает выдвижные опоры 4 и перемещает платформу с системой удержания равновесия 1 вдоль цепи мехатронных модулей 2 вниз со ступеньки (фиг. 7в). Там гетерогенный модульный реконфигурируемый мобильный робот вывешивается на выдвижных опорах 4 (фиг. 7г) и втягивает цепь мехатронных модулей 2 (фиг. 7д), замыкает ее в кольцо при помощи андрогинных стыковочными узлов 3, втягивает выдвижные опоры 4 и продолжает движение в режиме моноколеса.
Для транспортировки грузов с использованием группы гетерогенных модульных реконфигурируемых мобильных роботов один из роботов перемещает платформу с системой удержания равновесия 1 вдоль разомкнутой цепи мехатронных модулей 2, второй гетерогенный модульный реконфигурируемый мобильный робот сменными рабочими инструментами и схватами 5 располагает груз 6 на платформе с системой удержания равновесия 1 первого гетерогенного модульного реконфигурируемого мобильного робота (фиг. 8 а, б), первый гетерогенный модульный реконфигурируемый мобильный робот перемещает платформу с системой удержания равновесия 1 с грузом 6 (фиг. 8в), а третий гетерогенный модульный реконфигурируемый мобильный робот снимает грузы с нее (фиг. 8г).
Для применения сменных рабочих инструментов и схватов 5 в труднодоступных местах гетерогенный модульный реконфигурируемый мобильный робот присоединяет андрогинным стыковочным узлом 3 один из рабочих инструментов и схватов 5 к концу разомкнутой цепи мехатронных модулей 2 и проводит ее к месту выполнения работы (фиг. 9).
Работоспособность группы изобретений была проверена на компьютерной модели, которая наглядно продемонстрировала достижение требуемого технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ оснащения воздушных судов авиационными средствами поражения | 2022 |
|
RU2808134C1 |
| ЦЕПНОЙ ПРИВОД ГЕТЕРОГЕННОГО МОДУЛЬНОГО РЕКОНФИГУРИРУЕМОГО МОБИЛЬНОГО РОБОТА | 2020 |
|
RU2738620C1 |
| Сервисный мобильный робот и комплект монтируемых на обслуживаемых объектах устройств для обмена сменными модулями и жидкими материалами | 2023 |
|
RU2840834C2 |
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| РЕКОНФИГУРИРУЕМЫЙ МОДУЛЬНЫЙ РОБОТ И СПОСОБ ОРГАНИЗАЦИИ ДВИЖЕНИЙ И МЕЖМОДУЛЬНОГО ВЗАИМОДЕЙСТВИЯ РЕКОНФИГУРИРУЕМОГО МОДУЛЬНОГО РОБОТА | 2022 |
|
RU2801332C1 |
| КОНТРОЛЛЕР ОПЕРАТОРА ДЛЯ УПРАВЛЕНИЯ РОБОТОХИРУРГИЧЕСКИМ КОМПЛЕКСОМ | 2019 |
|
RU2718595C1 |
| АССИСТИРУЮЩИЙ ХИРУРГИЧЕСКИЙ КОМПЛЕКС | 2020 |
|
RU2720830C1 |
| МОДУЛЬНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ПАЛЛЕТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ | 2021 |
|
RU2783555C1 |
| Базовая платформа автономного интеллектуального робототехнического комплекса (АИРТК) | 2021 |
|
RU2764910C1 |
| РОБОТИЗИРОВАННЫЙ МОБИЛЬНЫЙ КУРЬЕРСКИЙ КОМПЛЕКС | 2022 |
|
RU2787547C1 |
Группа изобретений относится к области реконфигурируемых мобильных роботов. Гетерогенный модульный реконфигурируемый мобильный робот состоит из цепи мехатронных модулей, оснащенной с двух сторон андрогинными стыковочными узлами, платформы с системой удержания равновесия и выдвижными опорами, двигающейся вдоль цепи мехатронных модулей, и сменных рабочих инструментов и схватов с андрогинными стыковочными узлами, присоединяемых к цепи мехатронных модулей или располагаемых на платформе с системой удержания равновесия. Достигается создание робота, способного передвигаться с высокой скоростью и прокладывать себе путь через препятствия, при этом перевозя грузы, и выполнять различные действия рабочими инструментами. 3 н. и 4 з.п. ф-лы, 9 ил.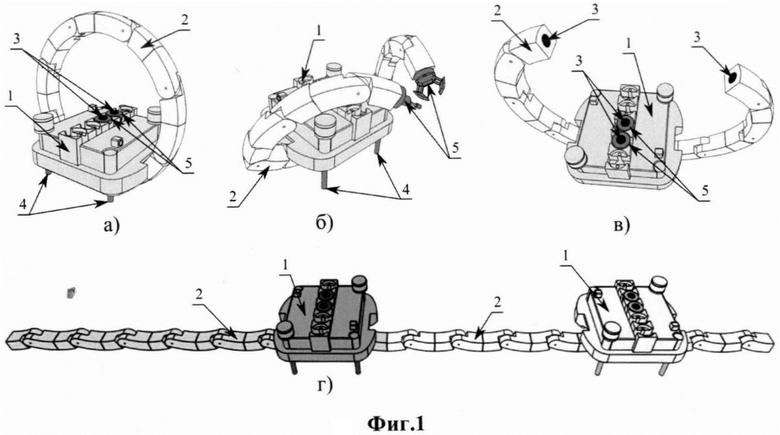
1. Гетерогенный модульный реконфигурируемый мобильный робот, характеризующийся тем, что состоит из цепи мехатронных модулей, оснащенной с двух сторон андрогинными стыковочными узлами, платформы с системой удержания равновесия и выдвижными опорами, двигающейся вдоль цепи мехатронных модулей, и сменных рабочих инструментов и схватов с андрогинными стыковочными узлами, присоединяемых к цепи мехатронных модулей или располагаемых на платформе с системой удержания равновесия.
2. Способ перемещения гетерогенного модульного реконфигурируемого мобильного робота по п. 1, характеризующийся тем, что андрогинные стыковочные узлы замыкают цепь мехатронных модулей в кольцо, и платформа с системой удержания равновесия движется внутри образованного кольца в режиме моноколеса, либо платформа с системой удержания равновесия движется вдоль разомкнутой цепи мехатронных модулей.
3. Способ по п. 2, где формирование кольца либо разомкнутой цепи мехатронных модулей осуществляют из цепей мехатронных модулей двух и более гетерогенных модульных реконфигурируемых мобильных роботов.
4. Способ перемещения грузов гетерогенным модульным реконфигурируемым мобильным роботом по п. 1, характеризующийся тем, что груз размещают на платформе с системой удержания равновесия в режиме моноколеса, либо груз перемещают сменные рабочие инструменты и схваты, присоединенные к концам цепи мехатронных модулей андрогинными стыковочными узлами, либо груз перемещают на платформе с системой удержания равновесия, движущейся вдоль разомкнутой цепи мехатронных модулей с осуществлением погрузочно-разгрузочных работ гетерогенным модульным реконфигурируемым мобильным роботом при помощи сменных рабочих инструментов и схватов.
5. Способ по п. 4, где одновременно используют сменные рабочие инструменты и схваты двух и более гетерогенных модульных реконфигурируемых мобильных роботов.
6. Способ по п. 4, где формирование кольца либо разомкнутой цепи мехатронных модулей осуществляют из цепей мехатронных модулей двух и более мобильных гетерогенных модульных реконфигурируемых мобильных роботов.
7. Способ по любому из пп. 4-6, где погрузочно-разгрузочные работы дополнительно осуществляют, в том числе, другими гетерогенными модульными реконфигурируемыми мобильными роботам при помощи их сменных рабочих инструментов и схватов, присоединенных к концам их цепей мехатронных модулей андрогинными стыковочными узлами.
| МЕХАТРОННО-МОДУЛЬНЫЙ РОБОТ | 2013 |
|
RU2560829C2 |
| Применение карбонильного способа получения никеля для снятия покрытия с забракованных никелированных деталей | 1959 |
|
SU129449A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОДОЛЕНИЯ ПРЕПЯТСТВИЙ | 2014 |
|
RU2554270C1 |
| DE 102018211936 A1, 13.02.2020 | |||
| US 20180111275 A1, 26.04.2018. | |||

