Изобретение относится к обработке металлов давлением, а точнее к кузнечно- штамповочным автоматам, и может быть использовано при решении сложных технологических процессов, сочетающих малоот- ходность и возможность полной автоматизации изготовления сложных деталей: совмещение штамповки и сборки, например, одновременную штамповку двух различных деталей из разных материалов и их соединение разъемными и неразъемными методами (запрессовкой, сваркой, клепкой) или штамповку деталей из проволоки с укладкой их на несущею одновременно штампуемую ленту (лентоноситель) с замковыми элементами: совмещение штамповки и механической обработки; независимую штамповку нескольких несложной формы деталей.
Целью изобретения является расширение технологических возможностей за счет изготовления деталей повышенной сложности.
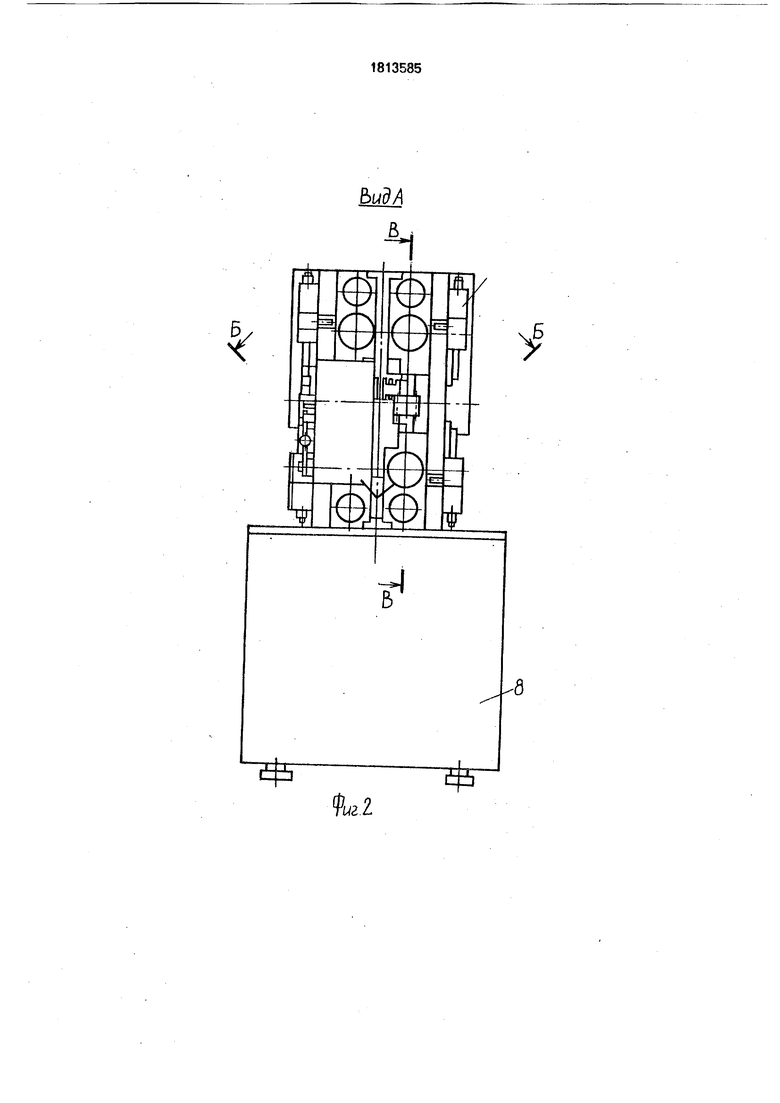
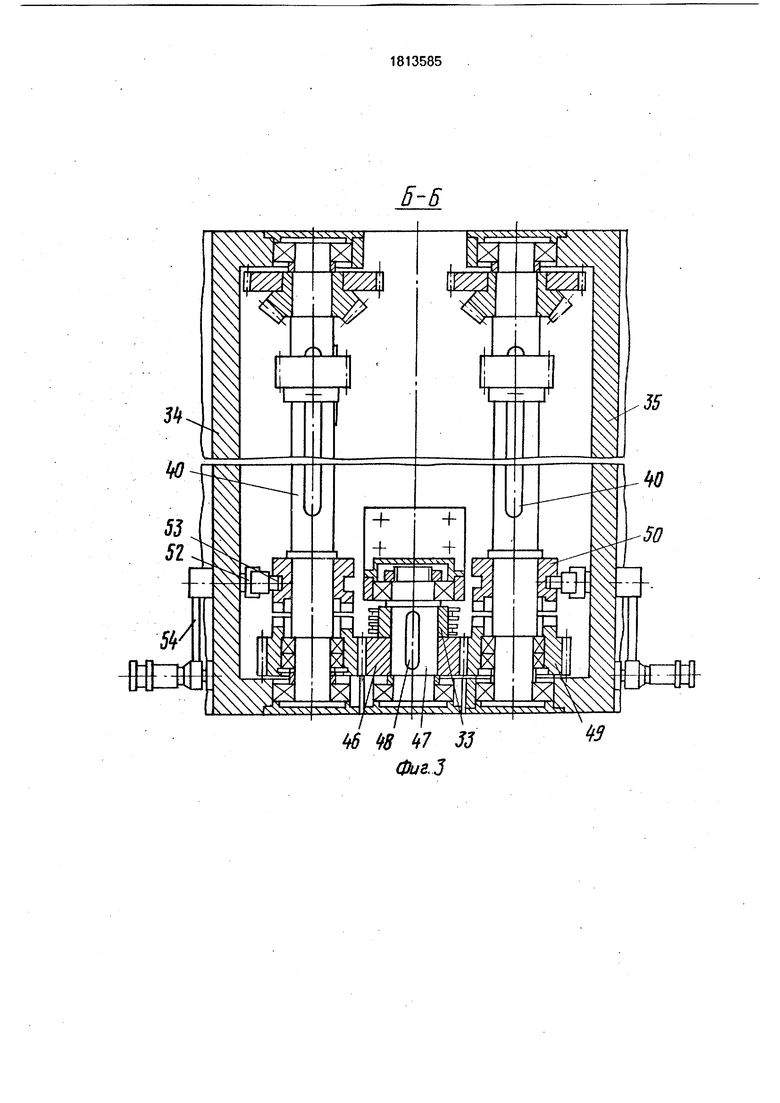
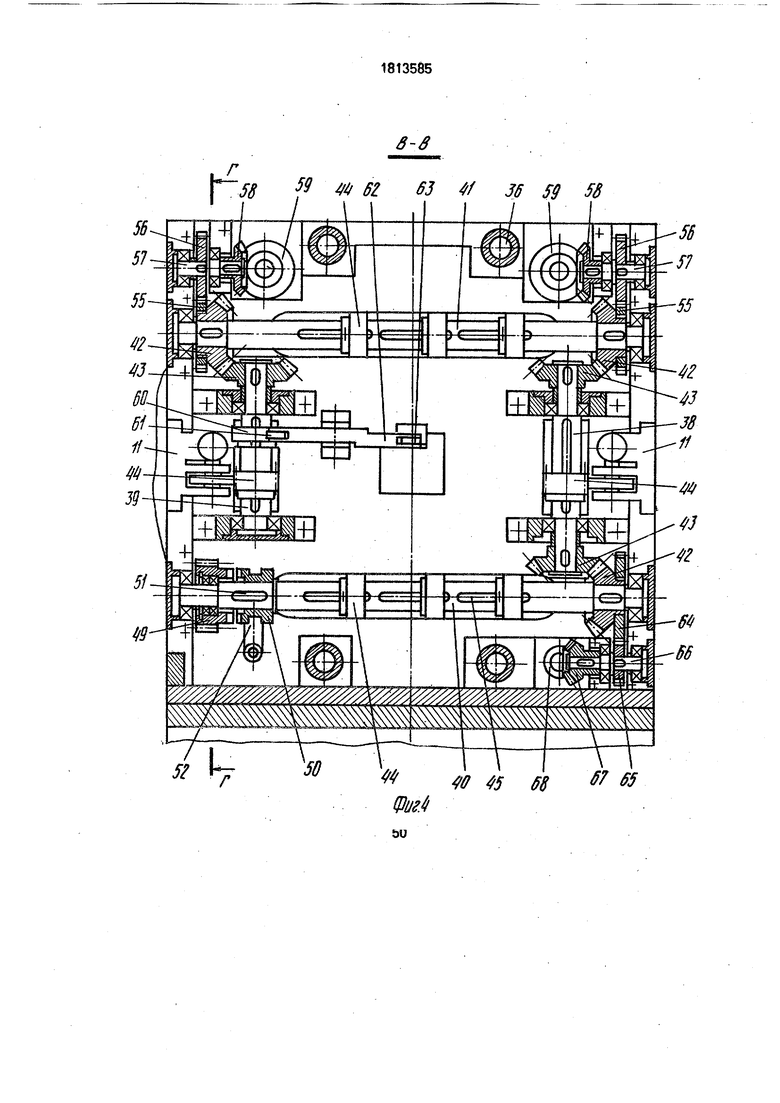
На фиг.1 изображен автомат универсально-гибочной модульный штамповочный; на фиг.2 - вид А на фиг.1; на фиг.З - разрез Б-Б на фиг.2; на фиг.4 - разрез В-В на фиг.2; на фиг.5 - разрез Г-Г на фиг.4; на фиг.6 - электромагнитный блок; на фиг.7 - вид Д на фиг.6; на фиг.8 - два состыкованных автомата с вертикальным расположением столов; на фиг.9 - разрез Е-Е на фиг.8; на фиг.10 - автомат с горизонтальным расположением стола; на фиг. 11 - вид 3 на фиг.10; на фиг.12-два состыкованных автомата с горизонтальным расположением столов; на фиг.13 - вид К на фиг.12; на фиг.14 00
СО
ел
00
ел
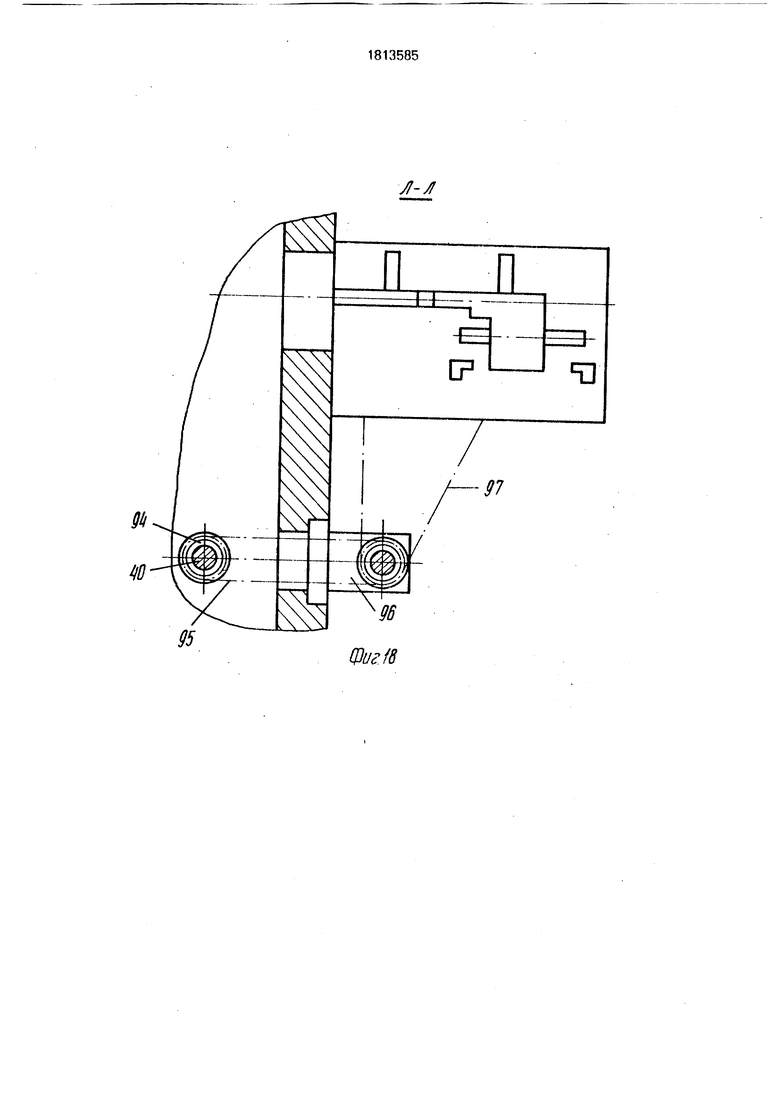
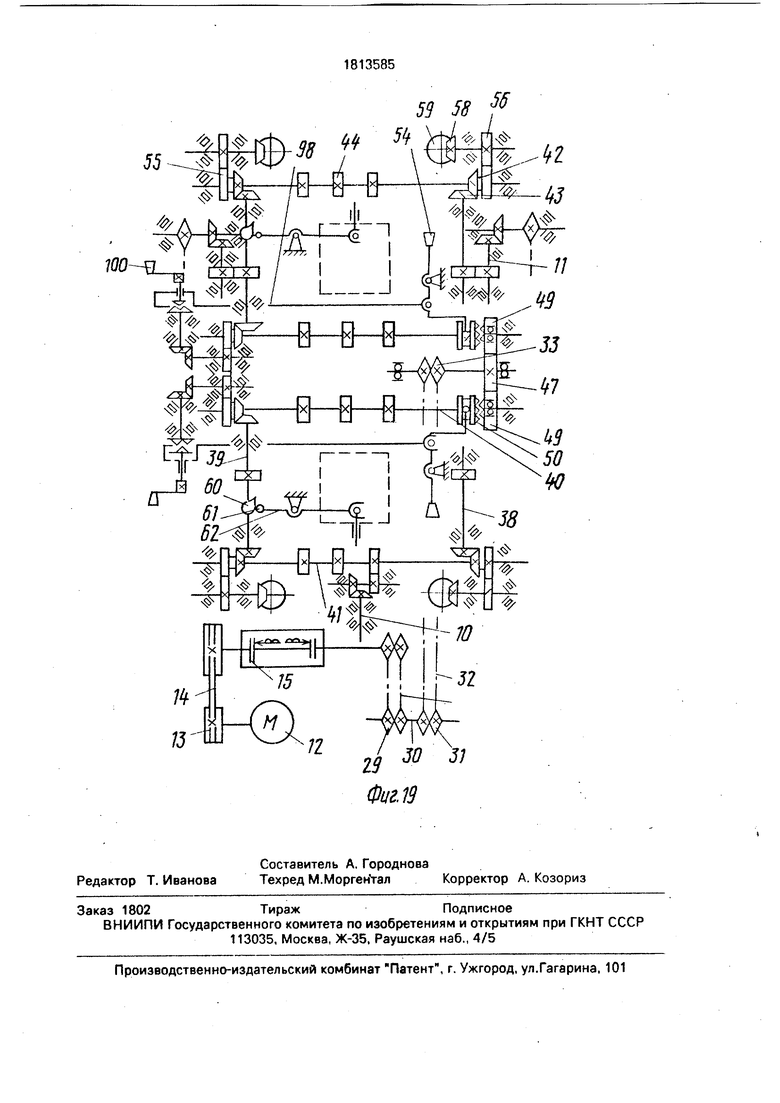
два состыкованных автомата с вертикальным расположением столов; на фиг.15 - узел I на фиг.14; на фиг,16 - разрез И-И фиг. 10; на фиг.17- разрез Ж-Ж на фиг.8; на фиг.18 - разрез Л-Л на фиг,14; на фиг.19 - кинематическая схема автомата, изображенного на фиг.1.
Автомат универсально-гибочный, штамповочный модульного типа для изготовления изделий повышенной сложности состоит из подающего устройства - клещевой (цанговой) подачи 1, пресса 2, подблоч- ного штампа 3, инструментальных головок 4, импульсной системы 5 смазки, системы 6 подготовки сжатого воздуха, тиристорного преобразователя 7, приводного модуля 8, гибочно-штамповочного модуля 9, приводных станций 10, устройства 11 привода клещевых подач.
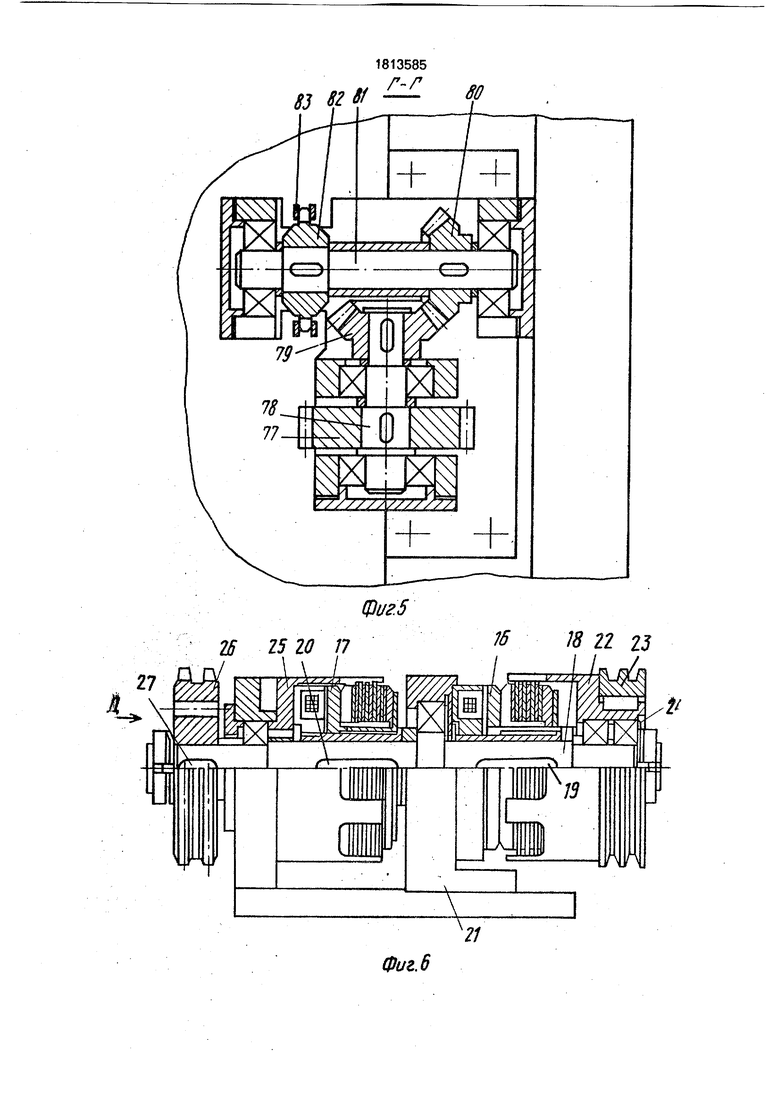
Приводной модуль 8 (фиг.1) выполнен в виде призматической тумбы, внутри которой имеется электродвигатель 12, входящий в тиристорный преобразователь с установленным на его валу шкивом 13, передающим вращение ремнями 14 на ведущий шкив электромагнитного блока 15. Электромагнитный блок состоит из электромагнитных сухих быстродействующих муфты 16, муфты-тормоза 17, установленных жестко на общем валу 18 посредством шпонок 19, 20 на втулках муфт. Электромагнитная катушка муфты 16 закреплена на корпусе 21 электромагнитного блока, а водило 22 жестко соединено с ведущим шкивом 23, установленным на одном конце вала на подшипниках 24.
Электромагнитная катушка муфты-тормоза 17 вместе с водилом 25 жестко закреплена на другой стороне корпуса 21. Ведомая звездочка 26 посредством шпонки 27 жестко соединена с другим концом вала 18,Звездочка 26 цепью 28 связана с ведущей звездочкой 29, жестко установленной на одном конце распределительного вала 30. На другом конце вала жестко установлена ведомая звездочка 31, цепью 32 связанная со звездочкой 33 модуля 9. Гибочно-штампо- вочный модуль 9 состоит из двух рабочих столов, обращенных своими базовыми плоскостями в противоположные стороны, вы- полненные в виде плит 34 и 35 с центральными окнами и четырьмя продольными пазами, оси которых параллельны боковым граням плит. Плиты 34 и 35 соединяются между собой стяжками 36. Каждая из плит 34 и 35 крепятся отдельно к основанию 37, выполненному в виде горизонтальной плиты и крепящемуся к приводному модулю 8. На внутренних поверхностях плит 34 и 35 параллельно
осям продольных пазов и симметрично главным осям этих плит на подшипниковых опорах установлены два вертикальных вала 38, 39 и два горизонтальных вала 40, 41,
кинематически связанных между собой посредством конических зубчатых колес 42, 43. На каждом из валов 38, 39, 40, 41 установлены широкие цилиндрические зубчатые колеса 44, перемещающиеся по оси
валов, имеющие связь с валами посредством шпонок 45 и фиксирующиеся на валах в нужном положении. Звездочка 33 и зубчатое колесо 46 жестко соединены с приводным валом 47, установленным на
5 подшипниковых опорах посредством шпонки 48. Зубчатое колесо 46 связано с цилиндрическими шестернями-полумуфтами 49, свободно вращающимися на валах 40. Ответные полумуфты 50 установлены на этих
0 же концах валов 40 на шпонках 51 и имеют возможность осевого перемещения по валам посредством вилок 52 с сухарями 53 устройства переключения кинематической ветви 54. Сухари 53 установлены в кольце5 вых пазах полумуфт 50. На торцах полумуфт 50, обращенных к шестерням-полумуфтам 49, симметрично их главным осям, выполнены кольцевые выступы, разные по углу и контактирующие с аналогичными по форме
0 кольцевыми впадинами на шестеро ях-полу- муфтах 49. На обоих концах верхних валов 41, на ступицах конических зубчатых колес 42, жестко установлены цилиндрические шестер5 ни 55, связанные с цилиндрическими шестернями 56, жестко установленными на валах 57. На концах валов 57 жестко установлены конические зубчатые колеса 58, связанные с коническими зубчатыми коле0 сами 59 привода пресса 2. На вертикальных валах 39 установлены кулачки 60, которые через ролики 61 воздействуют на рычаг 62, приводящий в движение толкатель 63, совершающий поступательное перпендику
5 лярное рабочей плоскости стола движение в центральном окне.
На концах нижних горизонтальных валов 40, на ступицах конических зубчатых колес 42, жестко установлены цилиндриче0 ские шестерни 64, связанные с цилиндриче- скими шестернями 65, жестко установленными на валах 66. На концах валов 66 жестко установлены конические зубчатые колеса 67, связанные с коническими
5 зубчатыми колесами 68 привода ручного поворота кинематической ветви.
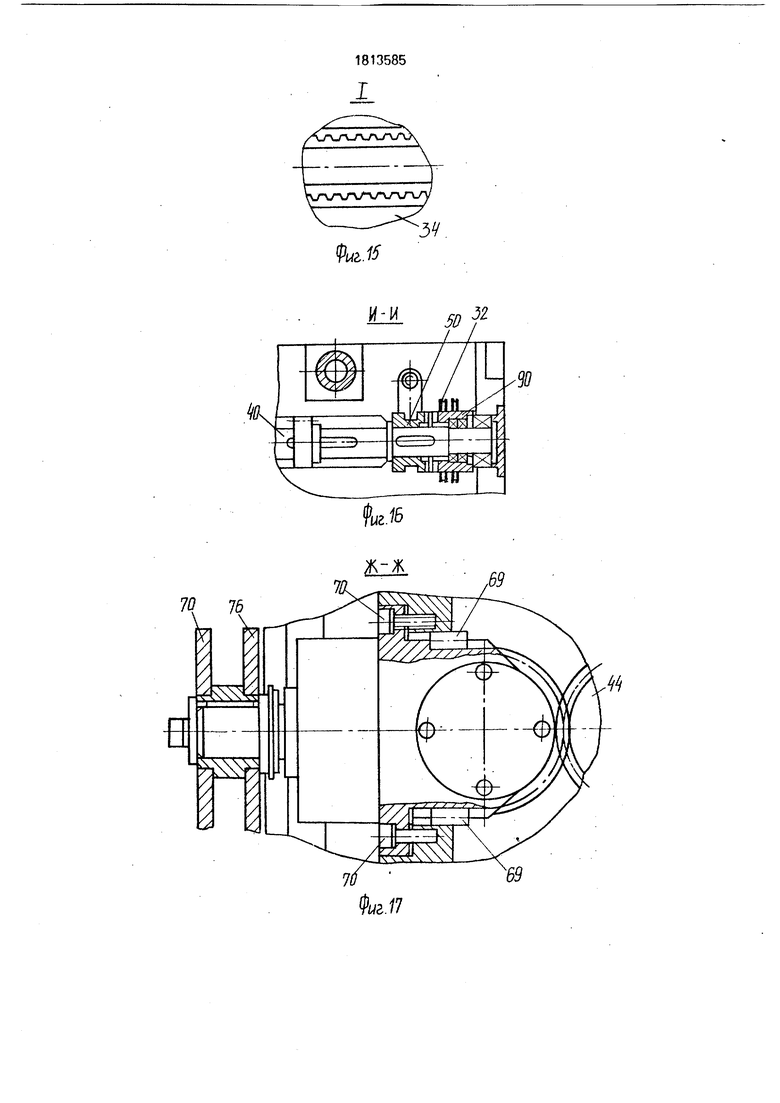
Приводные станции 10 выполняют роль приводов инструментальных головок 4, дискретно устанавливаются в пазах плит 34,35 с помощью цилиндрических фиксаторов 69.
устанавливаемых в полуотверстия на параллельных гранях пазов. К плитам 34, 35 приводные станции крепятся винтами 70. В приводной станции 10 цилиндрическое колесо 71, вращающееся от широкого цилиндрического зубчатого колеса 44 модуля 9, жестко связано с валом 72.
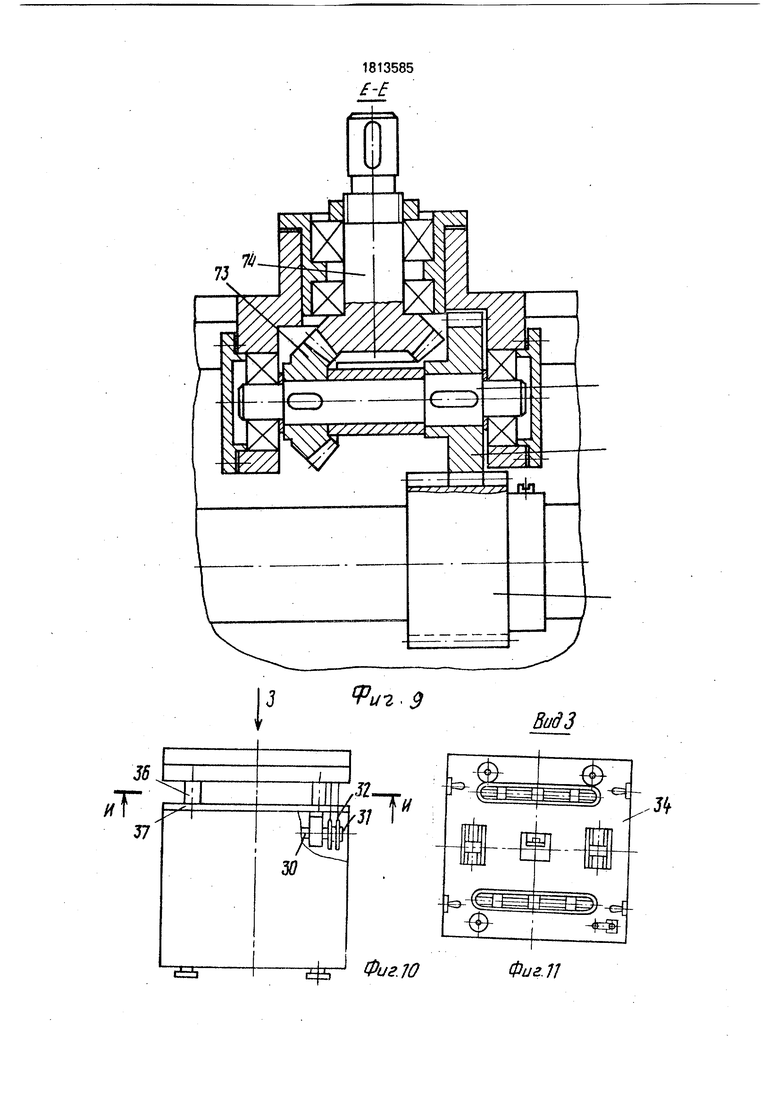
На другом конце вала 72 жестко установлено коническое зубчатое колесо 73, связанное с валом-шестерней 74, на котором устанавливаются кулачки 75,76 инструментальной головки,
Устройства привода клещевых подач 11 устанавливаются и крепятся справа и слева в модуле 9.
В устройстве привода клещевых подач цилиндрическое зубчатое колесо 77, вращающееся от широкого цилиндрического зубчатого колеса 44 модуля 9, жестко связано с- валом 78. На другом конце вала 78 жестко установлено коническое зубчаток колесо 79, связанное с коническим зубчатым колесом 80, жестко установленным на валу 81. На другом конце вала 81 жестко установлена звездочка 82, передающая движение клещевой подаче 1 посредством цепи 83.
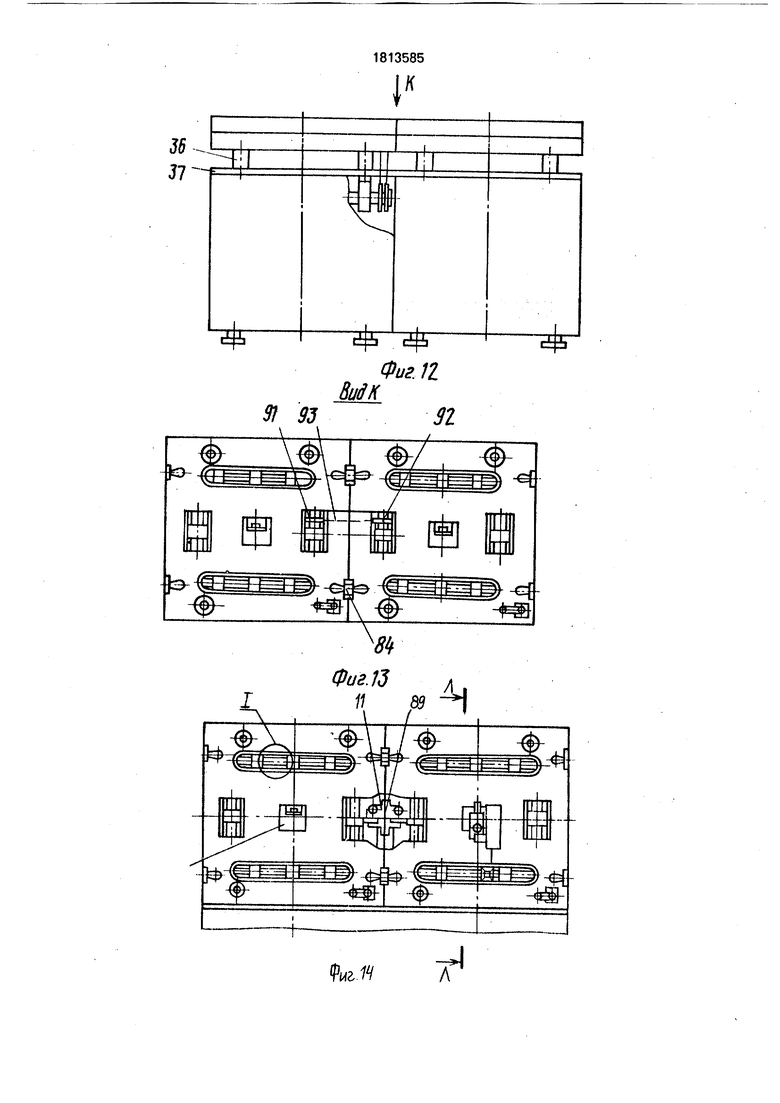
При наращивании разветвленной кинематической цепи линейные модули жестко соединяются боковыми торцевыми поверхностями посредством стяжек 84, устанавливаемых в овальных отверстиях плит 34, 35. Кинематическая связь устанавливается от распределительного вала 30 первого модуля через муфту 85 на распределительный вал 86 второго модуля, на котором жестко установлена звездочка 87, цепью 88 связанная со вторым линейным модулем.
Кинематическая связь линейных модулей может осуществляться посредством двух устройств привода клещевых подач, установленных на модулях и соединенных между собой цепью 89.
Один рабочий стол модуля 9 имеет возможность в горизонтальной плоскости жестко соединяться посредством стяжек 36 с основанием 37. Кинематическая связь устанавливается посредством цепной передачи через звездочку 31, установленную на распределительном валу 30, цепь 32 и звездоч- ку-полумуфту 90, устанавливаемую на валу 40 вместо шестерни-полумуфты 49.
Два расположенных горизонтально рабочих стола модулей 9 жестко соединяются боковыми торцевыми поверхностями посредством стежек 84, а к основаниям 37 жестко крепятся стяжками 36. Кинематическая связь между модулями 9 осуществляется посредством цепной передачи через звездочки 91, 92, устанавливаемые на вал модуяя 9 и цепь 93. Клещевая подача 1 имеет возможность пристыковаться к плоскости рабочего стола, замыкая кинематическую связь на привод подающей каретки от звездочки 94, установленной на горизон- 5 тальном валу 40, цепь 95, приводную станцию 96 и цепь 97.
Приводные станции 10 могут устанавливаться в двух фиксированных положениях с относительным поворотом их на 180°. При
0 этом вращение кулачков 75, 76, установленных на выходном валу вала-шестерни 74, изменяется на противоположное.
Из кинематической схемы автомата следует, что при включении одной из ветвей,
5 при воздействии на устройство переключения кинематической ветви 54, происходит перемещение на валу 40 полумуфты 50 и ее сцепление с шестерней-полумуфтой 49. При этом также происходит перемеще0 ние тяги 98, на которой жестко установлена заслонка 99, препятствующая ручному про- вороту ветви рукоятки 100 при включенной ветви.
Автомат работает следующим образом.
5При включении тиристорного преобразователя 7 устанавливается необходимая скорость вращения электродвигателя 12, на валу которого установлен шкив 13, Со шкива 13 посредством ремней 14 вращение пода0 ется на ведущий шкив 23 электромагнитного блока 15. Ведущий шкив и жестко связанное с ним водило 22 свободно вращаются на конце вала. При отключении муфты 16 вращение на вал 18 не передается, элек5 тродзигатель 12 работает на холостом ходу. При включении муфты 16 вращение передаётся на вал 18 и жестко связанную с ним звездочку 26, от которой посредством цепи 28 вращается ведущая звездочка 29, жестко
0 установленная на валу 30. С вала 30 и жестко установленной на нем ведомой звездочки 31 цепи 32 вращение передается на звездочку 33 модуля 9. От вала 47 вращается зубчатое колесо 46, от которого передается
5 вращение на две шестерни-полумуфты 49, свободно вращающиеся на нижних горизонтальных валах 40.
Кинематические ветви столов не работают. При включении одной из ветвей или
0 двух ветвей одновременно от устройства переключения кинематической ветви 54 посредством вилок 52 с сухарями 53 происходит перемещение по оси вала 40 полумуфты 50, имеющей с ним связь шпон5 кой 51.
При стыковке полумуфты 50 и шестерни-полумуфты 49 вращение от шестерни-полумуфты 49 передается на полумуфту 50
через шпонку 51 и нз нижний вал 40. От вала
40 посредством конических зубчатых колос
42, 43 вращение передается на валы 38, 39, 41. От установленных на них широких зубчатых колес 44 через приводные станции 10 получают вращение кулачки 75, 76 инструментальных головок 4, от которых происходит их работа. Через цилиндрические шестерни 55, 56, вал 57, конические зубчатые колеса 58, 59 вращение передается на эксцентриковый пресс 2.
Установленные на валах 39 кулачки 60 через ролики 61 воздействуют на рычаг 62, который приводит в движение толкатель 63, совершающий поступательное движение в центральном окне.
От широких зубчатых колес 44, установленных на вертикальных валах 38, 39, через кинематически связанные с ними устройства привода клещевых подач 11 и цепь 83 происходит работа клещевой подачи 1.
При стыковке клещевой подачи 1 и плоскости рабочего стола можно производить поперечную передачу материла, используя промежуточную приводную станцию 96. Для мгновенного останова автомата при включенном электродвигателе 12 отключается муфта 16, при этом вращающееся водило 22 и ведущий шкив не передают вращения на вал 18. Одновременно включается муфта-тормоз 17, при этом вал 18 оста- навливается, т.к. .муфта-тормоз взаимодействует с водилом 25, жестко закрепленным в корпусе 21.
При наращивании кинематической цепи кинематическая связь на второй модуль осуществляется от распределительного вала 30 первого модуля через муфту 85 на распределительный вал 86 второго модуля звездочкой 87 и цепью 88.
Кинематическая связь двух модулей может осуществляться посредством двух устройств привода клещевых подач 11 и цепи 89. При горизонтальном положении расположения одного из рабочих столов модуля 9 работа автомата происходит от звездочки 31, цепи 32, полумуфты 90, устанавливаемой на валу 40 вместо шестерни-полумуфты 49, на полумуфты 50.
При горизонтальном расположении двух рабочих столов модулей 9 работа второго стола осуществляется посредством цепной передачи от звездочек 91, 92 и цепи 93.
Формула изобретения . 1. Автомат универсально-гибочный, штамповочный, модульного типа, содержащий гибочно-штамповочный модуль с корпусом, подающим устройством, гибочными головками, прессом и кинематическими цепями привада гибочных головок, пресса и
подающего устройства с соответствующими группами валов, а также приводной модуль с электродвигателем, приводным и приемным валами, отличающийся тем, что,
с целью расширения технологических возможностей путем изготовления деталей повышенной сложности, приводной модуль состоит из тиристорного преобразователя, связанного с упомянутым электродвигате0 лем, выполненным в виде электродвигателя постоянного тока с ведущим шкивом, электромагнитного блока, включающего корпус, сухие быстродействующие электромагнитные муфту и муфту-тормоз с водила5 ми и катушками, втулки, шпонки и подшипниковые опоры, установленные на приемном валу, звездочек и ведомого шкива, закрепленных на приемном валу на обоих его концах, размещенных на
0 распределительном валу двух групп звездочек, одна из которых связана цепной передачей со звездочками приводного вала, гибочно-штамповочный модуль снабжен толкателем с приводным кулачком, смонти5 рованным в корпусе модуля, а сам этом корпус выполнен в виде двух рабочих столов с обращенными в противоположныме стороны базовыми поверхностями и с центральными окнами и продольными пазами,
0 параллельными боковым граням столов, а также стяжек, соединяющих столы, кинематические цепи привода пресса и гибочных головок выполнены в виде пар конических зубчатых колес, установленных на соответ5 ствующих группах валов и связывающих последние, цилиндрических зубчатых колес, смонтированных на валах с возможностью перемещения вдоль них и взаимодействия друг с другом шестерни-полумуфт, элемен0 тов связи последних в виде зубчатых и цеп- ных передач со звездочками распределительного вала приводного модуля, ответных шестерен-полумуфт с элементами их осевого перемещения в виде вилок
5 с сухарями, вдоль соответствующих валов с возможностью взаимодействия с первыми из упомянутых шестерен-полумуфт, шпонок, закрепленных на последних из упомянутых валов для монтажа
0 шестерен-полумуфт, причем втулки приводного модуля посредством шпонок закрепле- ны на приводном валу, на них смонтированы соответствующие элементы катушек муфты и муфты-тормоза, другие
5 элементы которых закреплены на корпусе, водило муфты установлено на одной из подшипниковых опор и жестко соединено с ведомым шкивом, а водило муфты-тормоза закреплено на корпусе электромагнитного блока.
2. Автомат по п.1, отличающийся тем, что в рабочих столах выполнены овальные отверстия, а автомат снабжен дополни- тельными гибочно-штамповочными модулями с кинематическими цепями при- вода гибочных головок и пресса, приводными модулями и стяжками, установленными в овальных отверстиях столов и соединяющих основные и дополнительные модули, при этом дополнительные приводные модули установлены с возможностью связи с основным приводным модулем и между собой,
3. Автомат по п.1 и 2, о т л и ч а ю- щ и и с я тем, что кинематические привод- ные цепи пресса и гибочных головок дополнительного гибочно-штамповочного модуля связаны с кинематической приводной цепью подающего устройства основного ги- бочно-штамповочного модуля.
4. Автомат по п.1 и 2, о т л и ч а ю щ и й- с я тем, что кинематические приводные цепи пресса и гибочных головок дополнительного гибочно-штамповочного модуля связаны непосредственно с кинематическими приводными цепями пресса и гибочными головками основного модуля.
5. Автомат по п.1,отличающийся тем, что один из рабочих столов гибочно- штамповочного модуля смонтирован горизонтально и жестко соединен посредством стяжек с приводным модулем.
6. Автомат поп,1 и 5, отличающий- с я тем, что оба рабочих стола смонтированы горизонтально.
7. Автомат по п.1,отличающийся тем, что на торцах направляющих пазов рабочих столов дискретно выполнены полуотверстия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автомат универсально-гибочный с приводом от центральной шестерни | 1986 |
|
SU1423219A1 |
| Универсально-гибочный автомат для изготовления деталей малых серий | 1988 |
|
SU1637891A1 |
| АВТОМАТ ИЗГОТОВЛЕНИЯ ИЗ ПРУТКА, ПОСРЕДСТВОМ ДВУСТОРОННЕЙ ГИБКИ, ДЕТАЛЕЙ ПРОСТРАНСТВЕННОЙ ФОРМЫ ТИПА КЛЕММ РЕЛЬСОВЫХ СКРЕПЛЕНИЙ | 2009 |
|
RU2412772C2 |
| Клещевая подача с приводом от вала пресса | 1988 |
|
SU1593751A1 |
| Автоматический штамповочный комплекс для изготовления деталей из полосы и устройство для отделения от стопы полосы и подачи ее в рабочую зону пресса | 1990 |
|
SU1756000A1 |
| Автомат для изготовления плетеной металлической сетки | 1971 |
|
SU444593A1 |
| Гибочно-штамповочный автомат | 1978 |
|
SU766711A1 |
| Многопозиционный штамповочный автомат | 1980 |
|
SU1013302A1 |
| Устройство Кривовязюка для вырубки заготовок из плоского материала | 1980 |
|
SU946733A1 |
| Установка для проверки муфты свободного хода стартеров | 1984 |
|
SU1324895A1 |
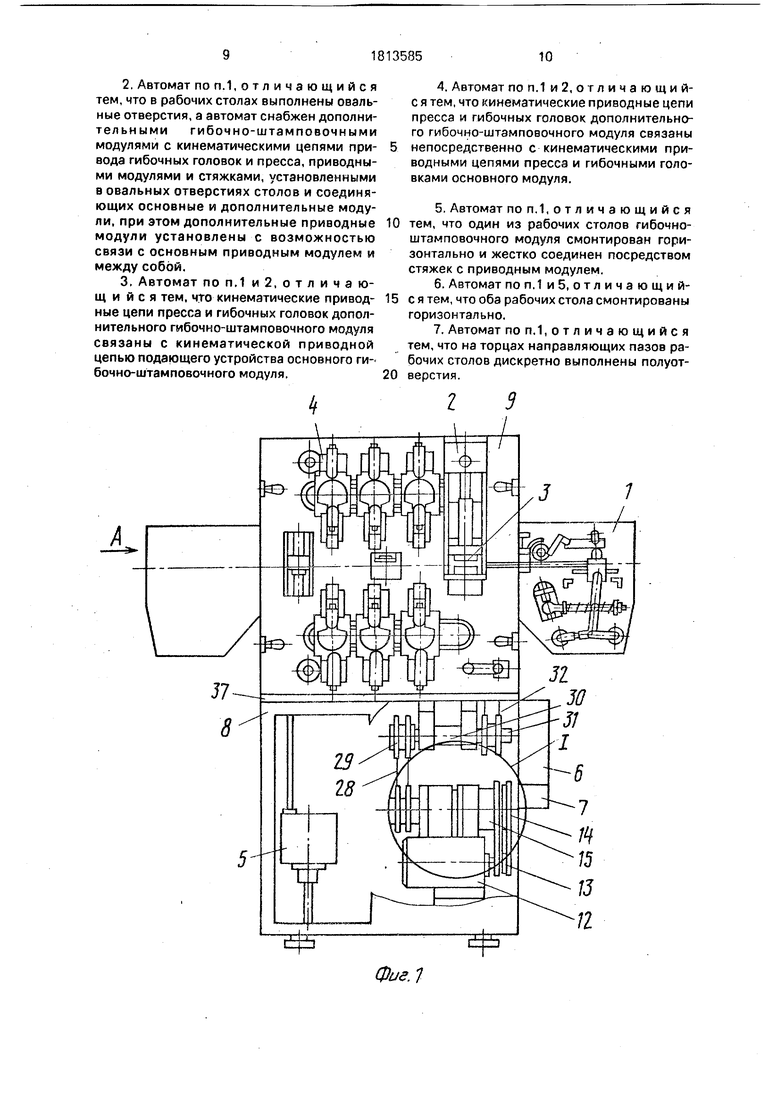

Использование: при изготовлении сложных деталей методом штамповки и гибки. Пори изготовлении сложных изделий материал (лента) или проволока подающим устройством 1 (или подающими устройствами, если используются, например, две ленты), подается к прессу 2, где происходят штамповочные операции (вырубка, пробивание и т.д.). Далее материал (уже заготовка) подается к гибочным головкам, где происходит окончательное изготовление изделия. Привод пресса, подающих устройств и гибочных головок происходит от приводного модуля. Ввиду того, автомат имеет два стола, на каждом из которых закреплены пресс и гибочные головки, расширяются его технологические возможности, т.к. это позволяет использовать оба стола не только для изготовления одинаковых деталей на разных столах, но и при изготовлении детали на одном столе передавать ее через центральное отверстие в столе на другой стол, где уже другие головки производят другие технологические операции. 6 з.п.ф-лы, 19 ил. 3 fe
Фиг. 7
ЬидА В
т1
Й«.г
5-6
16
18 22 23
Фаг. 6
Фмг.6
i
ф Фи г 70
Фи-г.9
ВидЗ
Фиг. 11
36
37
±a
I
Фиг.13 А 11 88 Н
I
К
я
EL
Составитель А. Городнова Редактор Т. ИвановаТехред М.Моргейтал Корректор А. Козориз
Заказ 1802Тираж Подписное
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул.Гагарина, 101
| Заявка ФРГ Мг 3234981, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
