РОДСТВЕННЫЕ ЗАЯВКИ
[0001] Настоящее изобретение относится к совместно регистрируемой заявке на патент США №15/080.322 (патентный реестр №051077-9630-US00), полное содержание которого включено в настоящий документ путем ссылки.
ОБЛАСТЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
[0002] Настоящее изобретение относится к способам и системам для обнаружения движения конвейерной системы, используемой в условиях подземной разработки.
УРОВЕНЬ ТЕХНИКИ
[0003] Сплошные системы разработки используются для разработки блока угля или иной руды, называемого сплошным блоком. Сплошной блок включает в себя угольный забой (или рудный забой), из которого изымается уголь (или руда). Две выработки - выработка главного штрека и выработка хвостового штрека - проходят по сторонам сплошного блока и ортогонально рудному забою. Сплошные системы разработки содержит механизированные крепи для поддержания кровли и перекрывающей породы над сплошной системой. Сплошной комбайн движется вдоль рудного забоя сплошного блока, срезая руду с рудного забоя и в забойный скребковый конвейер (AFC). Забойный скребковый конвейер простирается вдоль рудного забоя и транспортирует руду в направлении выработки главного штрека. Когда руда доставлена в выработку главного штрека, консольный перегружатель (BSL), соединенный с забойным скребковым конвейером, перегружает руду из забойного скребкового конвейера через угловое соединение (например, на 90 градусов) на ленточный конвейер, расположенный вдоль выработки главного штрека. После того, как сплошной комбайн срезает слой рудного забоя, сплошная система движется вперед для среза следующего слоя. Ввиду условий разработки и других факторов, рудный забой может становиться неоднородным, и забойный скребковый конвейер, вдоль которого перемещается комбайн, становится искривленным относительно рудного забоя.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0004] В одном варианте осуществления изобретения предлагается система для обнаружения выравнивания забоя и регулирования забоя сплошной системы разработки. Система содержит устройство обнаружения, установленное в выработке главного штрека; первое индикаторное устройство, установленное на комбайне сплошной системы разработки для индикации положения комбайна устройству обнаружения; и контроллер, связанный с устройством обнаружения. Контроллер определяет путь комбайна по мере движения комбайна вдоль рудного забоя. Путь комбайна определяется на основе сигнала с первого индикаторного устройства, принимаемого устройством обнаружения. Контроллер дополнительно генерирует индикацию выравнивания забоя на основе пути комбайна.
[0005] В еще одном варианте осуществления изобретения предлагается способ для обнаружения выравнивания забоя и регулирования забоя сплошной системы разработки. Способ включает в себя прием устройством обнаружения от первого индикаторного устройства на комбайне сигнала, который свидетельствует о положении комбайна сплошной системы разработки. Способ дополнительно включает в себя определение контроллером, связанным с устройством обнаружения, пути комбайна вдоль рудного забоя. Путь комбайна определяется на основе сигнала, принимаемого устройством обнаружения. Способ также включает в себя генерирование контроллером индикации выравнивания забоя на основе пути комбайна.
[0006] В еще одном варианте осуществления изобретения предлагается контроллер для обнаружения выравнивания забоя и регулирования забоя сплошной системы разработки. Контроллер содержит электронный процессор и исполнимые команды, хранящиеся в памяти, выполненной с возможностью определения пути комбайна вдоль рудного забоя. Путь комбайна определяется на основе сигнала с первого индикаторного устройства на комбайне, который принимается устройством обнаружения, связанным с контроллером и расположенным в выработке главного штрека. Контроллер дополнительно содержит исполнимые команды, хранящиеся в памяти, выполненной с возможностью генерирования индикации выравнивания забоя на основе пути комбайна.
[0007] До того, как подробно объясняются какие-либо варианты осуществления изобретения, следует понимать, что изобретение не ограничивается в своем применении подробностями конфигурации и размещения компонентов, излагаемыми в нижеследующем описании и иллюстрируемыми на прилагаемых чертежах. Изобретение может иметь другие варианты осуществления и осуществляться или реализовываться различными путями. Кроме того, следует понимать, что фразеология и терминология, используемые в настоящем документе, используются с целью описания и не должны рассматриваться как ограничивающие. Использование слов «содержащий», «включающий в себя» или «имеющий» и их вариаций в настоящем документе предполагает включение перечисленных после этого элементов и их эквивалентов, а также дополнительных элементов. При отсутствии иных указаний или ограничений термины «установленный», «соединенный», «поддерживаемый» и «связанный», а также их вариации используются в широком смысле и включают в себя и прямые, и косвенные установки, соединения, поддержания и связи.
[0008] Кроме того, следует понимать, что варианты осуществления изобретения могут включать в себя аппаратное обеспечение, программное обеспечение и электронные компоненты или модули, которые в целях рассмотрения могут иллюстрироваться или описываться, как если бы большинство компонентов было реализовано исключительно в аппаратном обеспечении. Однако специалисту в данной области техники по результатам прочтения данного подробного описания должны быть понятно, что, по меньшей мере, в одном варианте осуществления электронные аспекты изобретения могут быть реализованы в программном обеспечении (например, хранящемся в энергонезависимой машиночитаемой среде), исполнимым одним или более блоков обработки, таких как микропроцессор и/или специализированные интегральные схемы (ASIC). В этой связи необходимо отметить, что для реализации изобретения может использоваться множество аппаратно- или программно-реализованных устройств, а также множество различных структурных компонентов. Например, «серверы» и «вычислительные устройства», описываемые в данном описании, могут включать в себя один или более модулей машиночитаемой среды, один или более интерфейсов ввода/вывода и различные соединения (например, системную шину), соединяющие компоненты.
[0009] Другие аспекты изобретения станут очевидными в результате ознакомления с подробным описанием и прилагаемыми чертежами.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
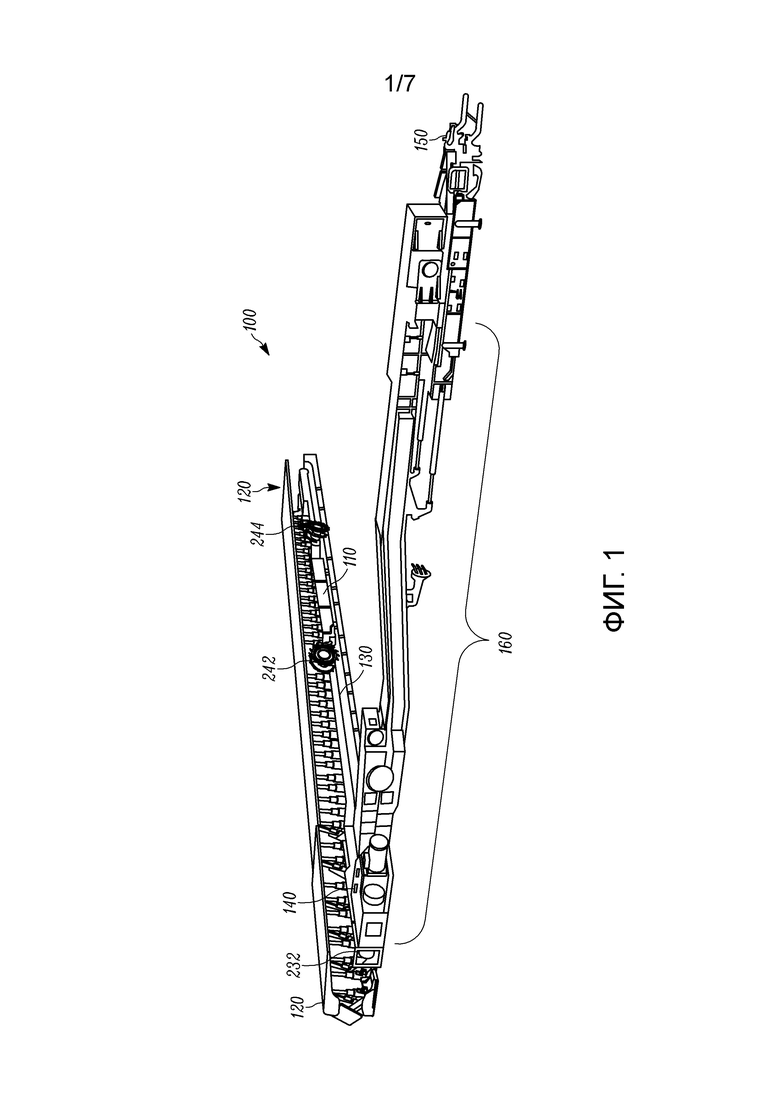
[0010] Фиг. 1 представляет собой вид в перспективе сплошной системы разработки в соответствии с одним вариантом осуществления изобретения.
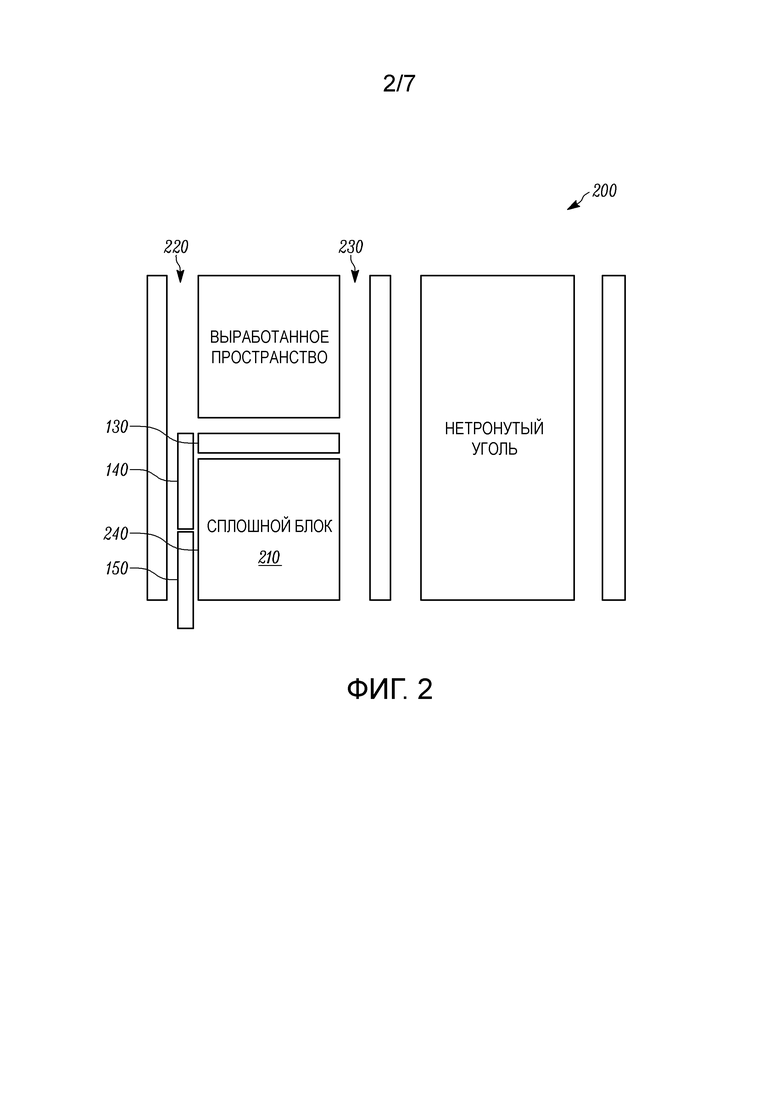
[0011] Фиг. 2 иллюстрирует пример подземного рудника, в котором может эксплуатироваться сплошная система разработки на фиг. 1.
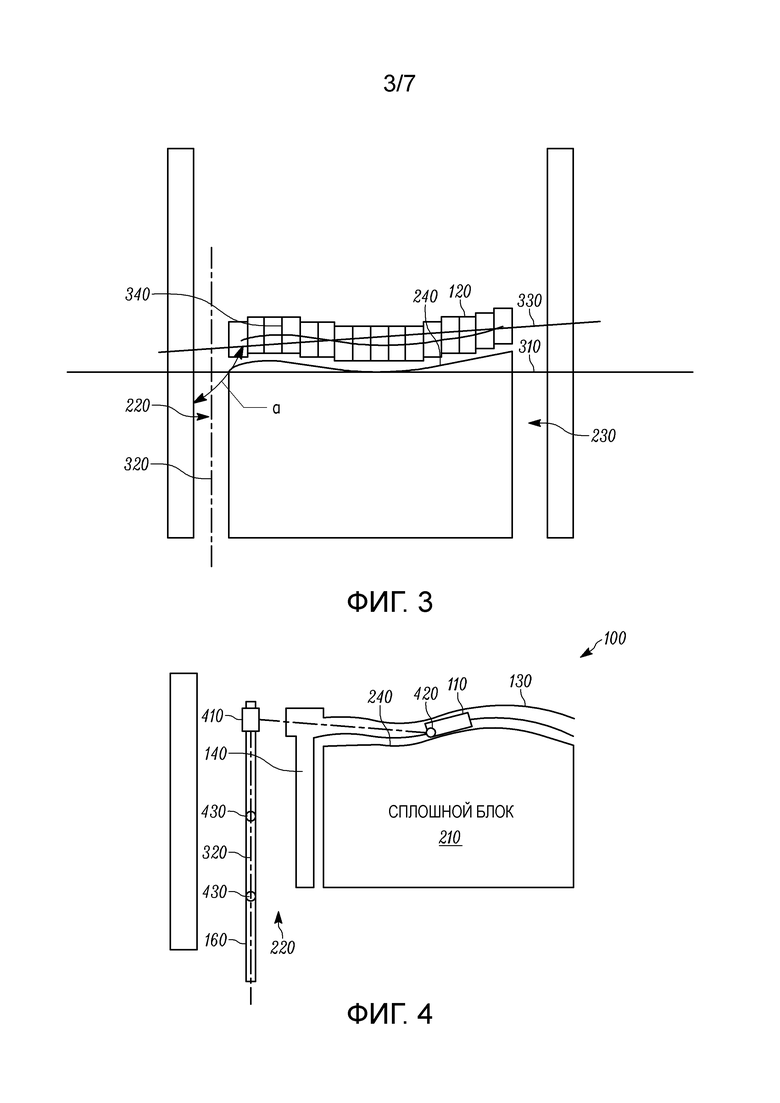
[0012] Фиг. 3 иллюстрирует выравнивание забоя сплошной системы разработки.
[0013] Фиг. 4 иллюстрирует систему обнаружения, используемую со сплошной системой разработки на фиг. 1, выполненную с возможностью реализации одного или более аспектов настоящего изобретения.
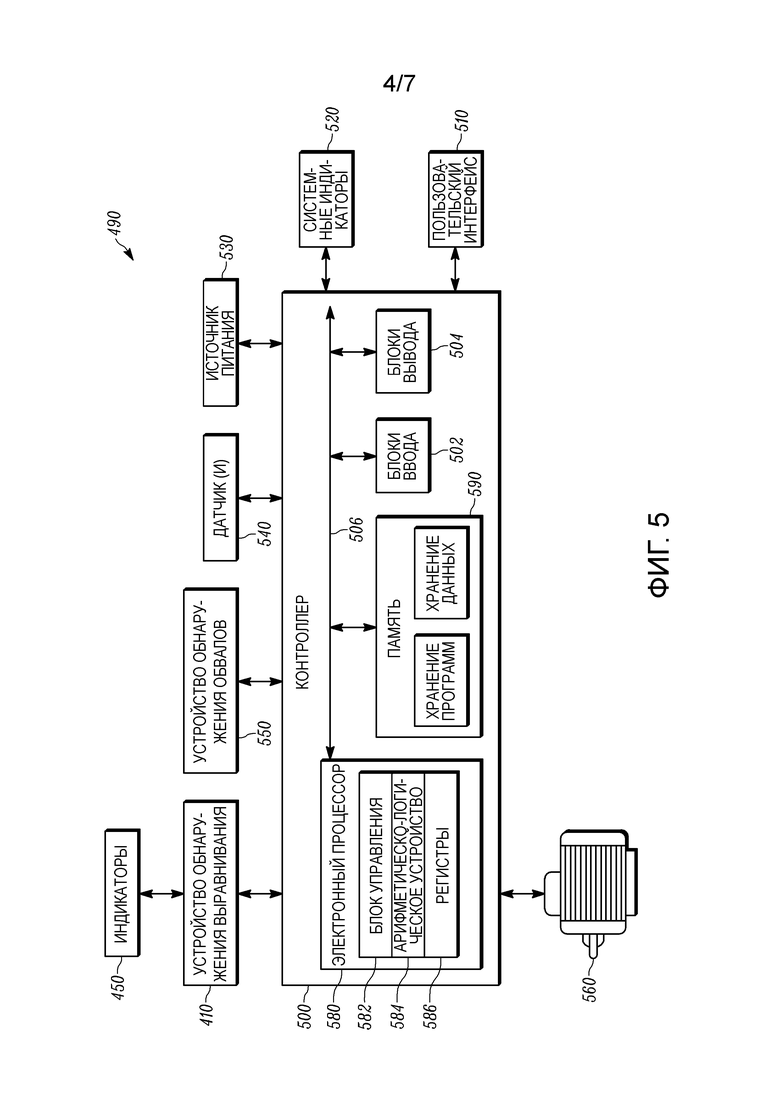
[0014] Фиг. 5 иллюстрирует контроллер для сплошной системы разработки на фиг. 1 в соответствии с одним вариантом осуществления изобретения.
[0015] Фиг. 6 иллюстрирует процесс обнаружения выравнивания сплошной системы разработки на фиг. 1 в соответствии с одним вариантом осуществления изобретения.
[0016] Фиг. 7 иллюстрирует процесс управления сплошной системой разработки на фиг. 1 в соответствии с одним вариантом осуществления изобретения.
[0017] Фиг. 8А и 8В иллюстрируют размещение оборудования сплошной разработки для корректировки выравнивания забоя сплошной системы разработки на фиг. 1.
ПОДРОБНОЕ ОПИСАНИЕ
[0018] В нижеследующем описании многочисленные конкретные детали излагаются для обеспечения полного понимания настоящего изобретения. Однако специалисту в данной области техники будет ясно, что настоящее изобретение может быть осуществлено без одной ли более из указанных конкретных деталей. В иных случаях хорошо известные признаки не описываются, чтобы избежать затруднения понимания настоящего изобретения.
[0019] Фиг. 1 иллюстрирует сплошную систему 100 разработки. В иллюстрированном примере сплошная система 100 разработки содержит без ограничений сплошной комбайн 110, механизированные крепи 120, забойный скребковый конвейер 130, консольный перегружатель 140, ленточный конвейер 150 и монорельсовую систему 160. Сплошная система 100 разработки используется для разработки блока руды (например, угля), называемого сплошным блоком подземного рудника, такого как подземный рудник 200, изображенный на фиг. 2. Как показано, подземный рудник 200 содержит сплошной блок 210, выработку 220 главного штрека и выработку 230 хвостового штрека. Сплошной блок 210 содержит рудный забой 240, из которого изымается руда. Две выработки - выработка 220 главного штрека и выработка 230 хвостового штрека - проходят по сторонам сплошного блока 210 и ортогонально рудному забою 240.
[0020] В соответствии с фиг. 1, сплошной комбайн 110 срезает руду из рудного забоя 240 сплошного блока 210. Сплошной комбайн 110 расположен над забойным скребковым конвейером 130 и срезает руду по мере его движения по длине рудного забоя 240. В некоторых вариантах осуществления сплошной комбайн 110 может устанавливаться на забойный скребковый конвейер 130. Сплошной комбайн 110 может содержать один или более режущих барабанов 242 и 244. Режущие барабаны 242 и 244 дополнительно оснащены режущими зубками и вращаются в плоскости, параллельной рудному забою 240. При вталкивании в рудный забой 240 и вращении режущие барабаны 242 и 244 врезаются в забой 240.
[0021] Как только руда срезается с рудного забоя 240, руда падает в забойный скребковый конвейер 130, который транспортирует руду в конец 232 главного штрека забойного скребкового конвейера 130 в выработке 220 главного штрека. Забойный скребковый конвейер 130 простирается по длине рудного забоя 240 от выработки 230 хвостового штрека до выработки 220 главного штрека. Забойный скребковый конвейер 130 может содержать целый ряд стальных пластин, способных перемещаться относительно друг друга за счет изгиба. В некоторых вариантах осуществления руда подается с помощью стальных стержней забойного скребкового конвейера 130, которые расположены под углом 90 градусов относительно забойного скребкового конвейера 130 и затягиваются парой круглых цепей.
[0022] В конце 232 главного штрека забойного скребкового конвейера 130 руда передается в консольный перегружатель 140. Консольный перегружатель 140 расположен вдоль выработки 220 главного штрека, проходящей вдоль ребра или стенки сплошного блока 210 от конца 232 главного штрека забойного скребкового конвейера 130 до ленточного конвейера 150. В некоторых вариантах осуществления консольный перегружатель 140 может иметь гибкую часть ближе к забойному скребковому конвейеру 130 с целью передачи руды через угловое соединение (например, на 90 градусов) на конце 232 главного штрека забойного скребкового конвейера 130. В некоторых вариантах осуществления консольный перегружатель 140 может иметь изменение возвышения вдоль своей длины с целью разгрузки руды на ленточный конвейер 150. В некоторых вариантах осуществления консольный перегружатель 140 может также содержать дробилку или дробильную установку с целью предотвращения повреждения и улучшения выгрузки на ленточный конвейер 150. В некоторых вариантах осуществления аналогично забойному скребковому конвейеру 130 руда подается стальными стержнями консольного перегружателя 140, которые расположены под углом 90 градусов относительно длины консольного перегружателя 140 и затягиваются парой круглых цепей. Консольный перегружатель 140 может быть подключен к приводу главного штрека и может перемещаться вдоль выработки 220 главного штрека или вбок в пределах выработки 220 главного штрека. Ленточный конвейер 150 принимает руду от консольного перегружателя 140 и транспортирует руду на поверхность. Ленточный конвейер 150 может простираться от конца консольного перегружателя 140 до поверхности.
[0023] Механизированные крепи 120 поддерживают кровлю подземного рудника 200 и подвигают забойный скребковый конвейер 130 во время операции разработки. Механизированные крепи 120 расположены вдоль рудного забоя 240, обеспечивая опору для кровли над забойным скребковым конвейером 130 и сплошным комбайном 110. В некоторых вариантах осуществления механизированные крепи 120 содержат навес и верхние и нижние гидравлические цилиндры. Навес может быть придавлен к кровле вертикальными цилиндрами с целью поддержания кровли во время операции разработки, а горизонтальные цилиндры могут использоваться для подвигания механизированных крепей 120 и забойного скребкового конвейера 130 в направлении обратного хода сплошного блока 210 (т.е. вниз на фиг. 2).
[0024] Монорельсовая система 160 поддерживает некоторое оборудование главного штрека, используемое сплошной системой разработки. Например, монорельсовая система 160 поддерживает нагнетательный водяной шланг высокого давления и гидравлический рукав, которые используются для охлаждения сплошного комбайна во время процесса разработки. Монорельсовая система 160 также содержит кабели питания и передачи данных для функционирования сплошной системы 100 разработки.
[0025] Несмотря на то, что в приведенном выше описании сплошная система 100 разработки изображена с конкретным размещением всех компонентов, специалистам будет понятно, что размещение на фиг. 1 предполагает только пример осуществления настоящего изобретения. Другие варианты осуществления могут включать в себя большее или меньшее число компонентов, размещаемых иначе, чем показано на чертеже, и могут выполнять дополнительные функции по сравнению с описываемыми в настоящем документе.
[0026] При разработке одного слоя сплошного блока 210 сплошная система 100 разработки отступает в направлении рудного забоя 240 с целью разработки следующего, свежеобнаженного слоя сплошного блока 210.
[0027] Каждый свежеобнаженный слой сплошного блока 210 может не быть однородным. Например, как показано на фиг. 3, рудный забой 240 искривляется внутрь и наружу, а не следует по прямой линии, такой как требуемая линия 310 выравнивания. Требуемая линия 310 выравнивания показана как перпендикулярная выработке 220 главного штрека и выработке 230 хвостового штрека. Однако в некоторых вариантах осуществления требуемая линия 310 выравнивания может не быть перпендикулярной выработке 220 главного штрека или выработке 230 хвостового штрека. Забойный скребковый конвейер 130 и механизированные крепи 120, как правило, следуют по контуру рудного забоя 240. Определение выравнивания рудного забоя 240 поможет автоматизировать и регулировать сплошную систему 100 разработки вдоль рудного забоя 240. Как подробнее описывается ниже, выравнивание забоя является общей мерой относительных положений механизированных крепей 120 по отношению к прямой линии, теоретически прочерченной от выработки 220 главного штрека до выработки 230 хвостового штрека и перпендикулярной направлению выработки 220 главного штрека, выработки 230 хвостового штрека или и той, и другой.
[0028] Фиг. 4 иллюстрирует показанную на фиг. 1 сплошную систему 100 разработки, содержащую компоненты обнаружения, используемые для определения выравнивания рудного забоя 240. В иллюстрированном примере компоненты обнаружения включают в себя устройство 410 обнаружения, угловое индикаторное устройство 420 и индикаторные устройства 430 главного штрека.
[0029] Устройство 410 обнаружения обнаруживает положение сплошного комбайна 110 по мере его движения вдоль рудного забоя 240. Устройство 410 обнаружения может устанавливаться на оборудовании главного штрека (например, на монорельсовой системе 160). Оборудование главного штрека может быть выполнено с возможностью перемещения устройства 410 обнаружения вдоль выработки 220 главного штрека по мере подвигания сплошной системы 100 разработки таким образом, что устройство 410 обнаружения сохраняет четкую линию визирования на сплошной комбайн 110. В некоторых вариантах осуществления устройство 410 обнаружения может быть установлено в других местоположения в выработке 220 главного штрека. Устройство 410 обнаружения может содержать устройство определения направления и расстояния при помощи радиолуча (РАДАР), устройство лазерной локации (ЛИДАР), устройство определения местоположения и дальности с помощью звуковых волн (СОНАР) или иное известное электронное измерительное устройство, способное определять угол или расстояние и/или пространственные координаты объекта.
[0030] Угловое индикаторное устройство 420 (например, первое индикаторное устройство) указывает положение сплошного комбайна 110 устройству 410 обнаружения. Угловое индикаторное устройство 420 может устанавливаться на сплошном комбайне таким образом, что оно имеет четкую линию визирования на устройство 410 обнаружения. Например, угловое индикаторное устройство 420 может устанавливаться на стороне главного штрека сплошного комбайна 110, как показано на фиг. 4. В некоторых вариантах осуществления угловое индикаторное устройство 420 может устанавливаться в других местоположениях главного штрека сплошного комбайна 110.
[0031] Одно или более из индикаторных устройств 430 главного штрека (например, второе индикаторное устройство) указывает положение выработки 220 главного штрека устройству 410 обнаружения. В частности, каждое из индикаторных устройств 430 главного штрека указывает положение линии главного штрека. Для упрощения описания будет описываться одно индикаторное устройство 430 главного штрека, и такое описание будет являться типичным для каждого из индикаторных устройств 430 главного штрека. Линия главного штрека простирается в направлении выработки 220 главного штрека. Например, линия главного штрека является центральной линией выработки 220 главного штрека (центральной линией 320 главного штрека), центральной линией монорельсовой системы 160 или линией вдоль груди забоя с обеих сторон центральной линией 320 главного штрека, которая определяет выработку 220 главного штрека. В некоторых вариантах осуществления центральная линия монорельса совпадает с центральной линией 320 главного штрека. Индикаторное устройство 430 главного штрека может устанавливаться на монорельсовой системе 160 или другом местоположении в выработке 220 главного штрека для указания положения линии главного штрека. В тех случаях, когда индикаторное устройство 430 главного штрека не расположено на линии главного штрека, устройство 410 обнаружения может определять положение линии главного штрека с помощью предварительно определенного смещения, свидетельствующего о смещении индикаторного устройства 430 главного штрека относительно линии главного штрека. Для упрощения описания центральная линия 320 главного штрека описывается в целом и используется в настоящем документе в качестве линии главного штрека для определения выравнивания забоя. Однако в некоторых вариантах осуществления линия главного штрека, используемая для определения выравнивания забоя, может быть смещена относительно центральной линии 320 главного штрека. В некоторых вариантах осуществления устройство 410 обнаружения расположено на центральной линии 320 главного штрека и ориентировано на этапе наладки таким образом, что центральная линия 320 главного штрека известна устройству 410 обнаружения без обмена данными с индикаторным устройством 430 главного штрека, которое может отсутствовать в системе в таких вариантах осуществления.
[0032] Сигналы, принимаемые от индикаторных устройств 420 и 430, могут, например, представлять собой периодические сигналы, генерируемые индикаторным устройством, могут генерироваться индикаторным устройством в ответ на команду от контроллера 500 (например, отправленную по проводному или беспроводному соединению) или могут представлять собой отражение сигнала, передаваемого устройством 410 обнаружения. Например, в некоторых вариантах осуществления устройство 410 обнаружения содержит передатчик для передачи радиосигналов, световых или звуковых сигналов в направлении индикаторных устройств 420 и 430. Индикаторные устройства 420 и 430 содержат отражатели, которые отражают сигналы от устройства 410 обнаружения. В качестве альтернативы, индикаторные устройства 420 и 430 могут содержать маяки, которые передают радиосигналы, световые или звуковые сигналы в направлении устройства 410 обнаружения. Устройство 410 обнаружения также содержит приемник для приема отражаемых или передаваемых сигналов от индикаторных устройств 420 и 430. В некоторых вариантах осуществления только одно из индикаторных устройств 420 и 430 может использоваться для определения выравнивания рудного забоя 240 и для регулирования сплошной системы 100 разработки. Кроме того, в некоторых вариантах осуществления устройство 410 обнаружения может содержать множество приемников, установленных в различных местоположениях для приема данных о положении от индикаторных устройств 420 и 430. В других вариантах осуществления больше индикаторных устройств, чем иллюстрируется на фиг. 4, может использоваться для определения выравнивания рудного забоя 240 и для регулирования сплошной системы 100 разработки. Следовательно, количество и положение приемных и индикаторных устройств приводятся в качестве примера и не должны рассматриваться как ограничивающие.
[0033] Фиг. 5 иллюстрирует систему 490 управления, связанную со сплошной системой 100 разработки. Система 490 управления содержит контроллер 500, связанный (например, электрически или с возможностью передачи данных) с целым рядом дополнительных модулей и компонентов, таких как пользовательский интерфейс 510, один или более системных индикаторов 520, источник 530 питания, один или более датчиков 540, устройство 550 обнаружения обвалов, устройство 410 обнаружения выравнивания, а также приводной механизм и привод 560 поддержания кровли.
[0034] Указанные один или более датчиков 540 представляют собой, например, датчики, выполненные с возможностью измерения или определения характеристики сплошного комбайна 110 (например, положения комбайна, скорости комбайна и т.д.), датчики, выполненные с возможностью измерения или определения характеристики конвейеров, таких как забойный скребковый конвейер 130, консольный перегружатель 140, ленточный конвейер 150 (например, положения цепи, скорости цепи, натяжения цепи и т.д.), датчики мощности в сплошной системе 100 разработки, выполненные с возможностью измерения или определения электрической характеристики (например, тока, напряжения, коэффициента мощности, крутящего момента, скорости, входной мощности, выходной мощности и т.д.), тензодатчики или датчики нагрузки (например, датчики натяжения, штифты нагрузки и т.д.), выполненные с возможностью генерирования сигнала, относящегося к нагрузке конвейеров, и т.д.
[0035] Контроллер 500 включает в себя комбинации аппаратного обеспечения и программного обеспечения, которые выполнены с возможностью - помимо прочего - генерирования выходного сигнала, относящегося к техническому состоянию сплошной системы 100 разработки, управления работой сплошной системы 100 разработки, активации указанных одного или более индикаторов 520 (например, жидкокристаллического дисплея [ʺLCDʺ]) и контроля работы сплошной системы 100 разработки. В некоторых вариантах осуществления контроллер 500 содержит множество электрических и электронных компонентов, которые обеспечивают питание, оперативное управление и защиту компонентов и модулей в контроллере 500 и/или сплошной системе 100 разработки. Например, контроллер 500 содержит - помимо прочего - электронный процессор 580 (микропроцессор, микроконтроллер или иное подходящее программируемое устройство), память 590, устройства 502 ввода и устройства 504 вывода. Электронный процессор 580 содержит - помимо прочего - блок 582 управления, арифметическо-логическое устройство (ʺALUʺ) 584 и множество регистров 586 и реализуется с помощью известной компьютерной архитектуры, такой как модифицированная гарвардская архитектура, архитектура фон Неймана и т.д. Электронный процессор 580, память 590, устройства 502 ввода и устройства 504 вывода, а также различные модули, соединенные с контроллером 500, соединены одной или более шинами управления и/или передачи данных (например, общей шиной 506). Шины управления и/или передачи данных изображены в общем виде на фиг. 5 в качестве примера. Использование одной или более шин управления и/или передачи данных для взаимосвязи между различными модулями и компонентами и передачи данных между ними будет известно специалисту в данной области техники исходя из изобретения, описываемого в настоящем документе. В некоторых вариантах осуществления контроллер 500 реализуется частично или полностью на полупроводниковом кристалле, является программируемой пользователем вентильной матрицей (ʺFPGAʺ), является специализированной интегральной схемой (ʺASICʺ), является пропорционально-интегральным дифференциальным (PID) регулятором и т.д.
[0036] Память 590 содержит, например, зону хранения программ и зону хранения данных. Зона хранения программ и зона хранения данных могут включать в себя комбинации различных типов памяти, таких как постоянное запоминающее устройство (ʺROMʺ), оперативное запоминающее устройство (ʺRAMʺ) (например, динамическое RAM [ʺDRAMʺ], синхронное DRAM [ʺSDRAMʺ] и т.д.), электрически-стираемое программируемое постоянное запоминающее устройство (ʺEEPROMʺ), флэш-память, жесткий диск, SD-карту или иные подходящие магнитные, оптические, физические или электронные запоминающие устройства или структуры данных. Электронный процессор 580 соединен с памятью 590 и исполняет программные команды, которые могут храниться в RAM памяти 590 (например, во время исполнения), ROM памяти 590 (например, большей частью на постоянной основе) или в иной энергонезависимой машиночитаемой среде, такой как другая память или диск. Программное обеспечение, входящее в реализацию сплошной системы 100 разработки, может храниться в памяти 590 контроллера 500. Программное обеспечение включает в себя, например, микропрограммное обеспечение, одно или более приложений, данные программ, фильтры, правила, один или более программных модулей и прочие исполнимые команды. Контроллер 500 выполнен с возможностью извлечения из памяти и исполнения - помимо прочего - команд, относящихся к процессам и способам управления, описываемым в настоящем документе. В других конструкциях контроллер 500 содержит дополнительное, меньшее или иное число компонентов.
[0037] Контроллер 500 определяет выравнивание забоя по данным о положении, принимаемым от устройства 410 обнаружения выравнивания. В некоторых вариантах осуществления контроллер 500 может также принимать информацию об обвалах забоя от устройства 550 обнаружения обвалов. В некоторых вариантах осуществления устройство 550 обнаружения обвалов аналогично устройству обнаружения, описываемому в одновременно рассматриваемой заявке на патент США № ______, именуемой «ОБНАРУЖЕНИЕ ОБВАЛОВ В СПЛОШНОЙ СИСТЕМЕ», содержание которой полностью включено в настоящий документ путем ссылки. Несмотря на то, что устройство 410 обнаружения выравнивания и устройство 550 обнаружения обвалов показаны как два отдельных компонента, в других вариантах осуществления комбинированное устройство обнаружения может использоваться для обнаружения и обвалов забоя, и выравнивания забоя.
[0038] Управление приводным механизмом и приводом 560 поддержания кровли осуществляется управляющими сигналами, принимаемыми от контроллера 500 или иного соответствующего контроллера. Каждая механизированная крепь 120 связана с секцией забойного скребкового конвейера 130 и использует гидравлический толкатель для подвигания этой секции забойного скребкового конвейера 130. За счет управления величиной перемещения гидравлических толкателей привод 560 может изменять угол подвигания забойного скребкового конвейера 130. В некоторых вариантах осуществления контроллер 500 управляет приводом 560 и сплошной системой 100 разработки автономно с помощью устройств 410, 550 обнаружения указанных одного или более датчиков 540 и одной или более хранящихся в памяти программ или модулей. В других вариантах осуществления контроллер 500 управляет приводом 560 и сплошной системой 100 разработки на основе комбинации вводимых вручную данных и автоматических управляющих устройств.
[0039] Пользовательский интерфейс 510 предусматривает интерфейс для восприятия пользовательских элементов управления и для обеспечения обратной связи с пользователем с целью управления и контроля сплошного комбайна 110, конвейеров 130, 140, 150 и/или сплошной системы 100 разработки. Например, пользовательский интерфейс 510 функционально связан с контроллером 500 для управления скоростью сплошного комбайна 110, скоростью конвейеров 130, 140, 150, скоростью привода 560, величиной обратного хода между циклами комбайна и т.д. Пользовательский интерфейс 510 может включать в себя комбинацию цифровых и аналоговых устройств ввода или вывода, требуемых для достижения необходимого уровня управления и контроля для сплошной системы 100 разработки. Например, пользовательский интерфейс 510 может включать в себя дисплей и устройства ввода, такие как сенсорный дисплей, одну или более ручек управления, номеронабиратели, переключатели, кнопки и т.д. Дисплей представляет собой, например, жидкокристаллический дисплей (ʺLCDʺ), светодиодный (ʺLEDʺ) дисплей, дисплей на органических светодиодах (ʺOLEDʺ), электролюминесцентный дисплей (ʺELDʺ), дисплей с электронной эмиссией за счет поверхностной проводимости (ʺSEDʺ), дисплей с автоэлектронной эмиссией (ʺFEDʺ), LCD на тонкопленочных транзисторах (ʺTFTʺ) и т.д. В других конструкциях дисплей представляет собой дисплей на основе Улучшенной активной матрицы на OLED (ʺAMOLEDʺ). Пользовательский интерфейс 510 может также быть выполнен с возможностью отображения условий или данных, связанных со сплошной системой 100 разработки, в реальном времени или главным образом в реальном времени. Например, пользовательский интерфейс 510 выполнен с возможностью отображения измеренных характеристик сплошной системы 100 разработки (например, сплошного комбайна 110, конвейеров 130, 140, 150 и т.д.), состояния сплошной системы 100 разработки, величины обвала забоя сплошной системы 100 разработки, выравнивания забоя сплошной системы 100 разработки и т.д. В некоторых реализациях управление пользовательским интерфейсом 510 осуществляется вместе с одним или более индикаторов 520 (например, светодиодов) для обеспечения визуальной индикации о состояниях или условиях сплошной системы 100 разработки, включая обвал забоя и выравнивание забоя.
[0040] Несмотря на то, что на фиг. 5 иллюстрируется один контроллер, в других конструкциях контроллер 500 может быть разделен на множество контроллеров. Например, контроллер 500 может быть разделен на объединенный блок управления (ʺCCUʺ), программируемый блок управления (ʺPCUʺ) и т.д. CCU может быть установлен во взрывобезопасном кожухе и обеспечивает управление конвейерной системой. PCU является искробезопасной системой, которая может сопрягаться с CCU - помимо прочего - для остановки, запрета, включения и т.д. работы конвейера.
[0041] Как указано выше, устройство 410 обнаружения выдает данные о положении, свидетельствующие о положении сплошного комбайна 110 по мере его движения вдоль рудного забоя 240. Контроллер 500 принимает данные о положении от устройства 410 обнаружения. Затем контроллер 500 обрабатывает и анализирует данные о положении для определения выравнивания рудного забоя 240 и сплошной системы 100 разработки. В некоторых вариантах осуществления контроллер 500 может принимать корректировочные меры для фиксации и коррекции выравнивания забоя, обнаруженного устройством 410 обнаружения. Способ определения и коррекции выравнивания забоя сплошной системы 100 разработки подробнее описывается ниже применительно к фиг. 6 и 7.
[0042] Процессы 600 и 700 связаны с определением выравнивания забоя сплошной системы 100 разработки и управлением движением сплошной системы 100 разработки с помощью механизированных крепей 120 на основе выравнивания забоя и описываются в настоящем документе применительно к этому. Различные этапы, описываемые в настоящем документе применительно к процессам 600 и 700, могут исполняться одновременно, параллельно или в порядке, который отличается от иллюстрированного последовательного способа выполнения. Процессы 600 и 700 могут также исполняться с использованием меньшего числа этапов, чем показано в иллюстрированном варианте осуществления. Кроме того, контроллер 500 и устройство 410 обнаружения выполнены с возможностью исполнения процессов 600 и 700 в то же время или вместе с другими процессами.
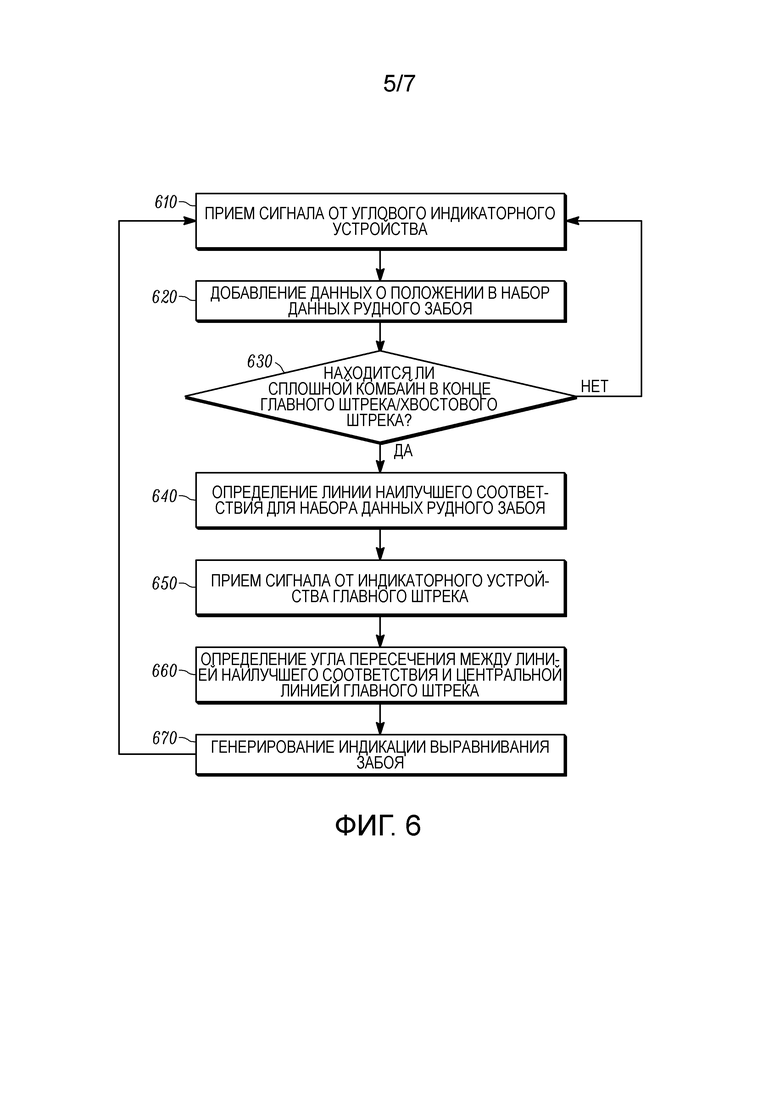
[0043] Фиг. 6 иллюстрирует процесс 600 для определения выравнивания забоя сплошной системы 100 разработки. На этапе 610 устройство 410 обнаружения принимает сигнал, свидетельствующий о положении сплошного комбайна 110, от углового индикаторного устройства 420. Как описано выше, устройство 410 обнаружения может передавать сигнал в угловое индикаторное устройство 420 и принимать отраженный сигнал от углового индикаторного устройства 420. Контроллер 500, электрически соединенный с устройством 410 обнаружения, определяет положение сплошного комбайна 110 на основе принимаемого сигнала от углового индикаторного устройства 420. Положение может включать в себя как результат измерения расстояния, указывающий расстояние между устройством 410 обнаружения и сплошным комбайном 110, так и результат измерения направления, указывающий направление, в котором расположен сплошной комбайн 110 относительно устройства 410 обнаружения (например, с использованием угла величиной 0-360 градусов относительно опорной точки, находящейся внутри устройства 410 обнаружения). В некоторых вариантах осуществления положение может включать в себя координаты сплошного комбайна 110 с использованием, например, прямоугольных координат, в которых ось х проходит в общем направлении перемещения сплошного комбайна 110, а ось y проходит в общем направлении выработки 220 главного штрека. На этапе 620 контроллер 500 добавляет данные о положении, указывающие положение сплошного комбайна 110, определяемое на этапе 610, в набор данных рудного забоя. Набор данных рудного забоя может храниться в памяти 590.
[0044] На этапе 630 контроллер 500 определяет, достиг ли сплошной комбайн 110 конца 232 главного штрека или конца хвостового штрека забойного скребкового конвейера 130. Контроллер 500 определяет, что сплошной комбайн 110 достиг любого конца (главного штрека/хвостового штрека) забойного скребкового конвейера 130, например, на основе сравнения положения сплошного комбайна, определяемого на этапе 610, с предварительно определенным положением главного штрека или хвостового штрека, хранящимся в памяти 590. В некоторых вариантах осуществления контроллер 500 может определять, что сплошной комбайн 110 достиг любого конца, на основе данных от других датчиков (например, датчиков (540)) или системных индикаторов. В тех случаях, когда контроллер 500 определяет, что сплошной комбайн 110 еще не достиг любого конца забойного скребкового конвейера 130, процесс 600 закольцовывается на этап 610 для постоянного определения положения сплошного комбайна 110 по мере того, как он движется вдоль рудного забоя 240. В некоторых вариантах осуществления этапы 610, 620 и 630 исполняются с некоторыми регулируемыми во времени интервалами таким образом, что, например, контроллер 500 определяет положение сплошного комбайна 110 каждую одну миллисекунду во время цикла комбайна.
[0045] Этапы 620 и 630, исполняемые множество раз в течение цикла комбайна, могут вместе называться этапом определения пути комбайна для сплошного комбайна 110. В этой связи, определенный путь комбайна включает в себя положение сплошного комбайна 110 во времени по мере того, как сплошной комбайн 110 перемещается от главного штрека к хвостовому штреку, или наоборот. Путь комбайна может сохраняться в памяти 590, при этом контроллер 500 может в графическом или числовом виде отображать путь комбайна. Например, фиг. 3 иллюстрирует пример пути 340 комбайна графически, в то время как перечень набора данных рудного забоя будет представлять собой числовое отображение пути комбайна.
[0046] В тех случаях, когда контроллер 500 определяет, что сплошной комбайн 110 достиг любого конца (главного штрека/хвостового штрека) забойного скребкового конвейера 130, на этапе 640 контроллер 500 определяет линию наилучшего соответствия для пути комбайна на основе данных о положении, получаемых на этапе 610 и сохраняемых в наборе данных рудного забоя на этапе 620. Например, фиг. 3 иллюстрирует линию 330 наилучшего соответствия для пути 340 комбайна. Контроллер 500 может использовать любые известные методы аппроксимации для определения линии 330 наилучшего соответствия на основе данных о положении, хранящихся в наборе данных рудного забоя.
[0047] На этапе 650 устройство 410 обнаружения принимает от индикаторного устройства 430 главного штрека сигнал, указывающий положение центральной линии 320 главного штрека. Как описано выше, устройство 410 обнаружения может передавать сигнал на указанные одно или более угловых индикаторных устройств 430 главного штрека и принимать отраженный сигнал от указанных одного или более угловых индикаторных устройств 430 главного штрека. Контроллер 500, связанный с устройством 410 обнаружения, определяет положение центральной линии 320 главного штрека на основе принимаемого сигнала от углового индикаторного устройства 430 главного штрека. В некоторых вариантах осуществления устройство 410 обнаружения может использовать положение устройства 410 обнаружения для указания контроллеру 500 положения центральной линии 320 главного штрека.
[0048] На этапе 660 контроллер 500 определяет угол α пересечения между линией 330 наилучшего соответствия, определяемой на этапе 640, и центральной линией 320 главного штрека, определяемой на этапе 650. Контроллер 500 может использовать любой известный метод для определения угла α пересечения. В тех случаях, когда угол α пересечения больше 90° (т.е. угол пересечения между требуемой линией 310 выравнивания и центральной линией 320 главного штрека), контроллер 500 указывает, что выравнивание забоя является опережением главного штрека. В тех случаях, когда угол α пересечения меньше 90°, контроллер 500 указывает, что выравнивание забоя является запаздыванием главного штрека. Следует понимать, что в вариантах осуществления, в которых требуемая линия 310 выравнивания не перпендикулярна центральной линии 320 главного штрека, то обстоятельство, является ли выравнивание забоя опережением главного штрека или запаздыванием главного штрека, определяется на основе угла пересечения между требуемой линией 310 выравнивания и центральной линией 320 главного штрека.
[0049] Этапы 640, 650 и 660 могут вместе называться этапом определения выравнивания забоя сплошной системы 100 разработки на основе пути комбайна.
[0050] На этапе 670 контроллер 500 генерирует индикацию выравнивания забоя сплошной системы 100 разработки на основе определенного выравнивания забоя. Эта индикация может выдаваться на пользовательском интерфейсе 510, передаваться в удаленное местоположение, сохраняться для вычерчивания графика и т.д. Индикация может включать в себя одно или более из графика выравнивания забоя, индикации опережения главного штрека, индикации запаздывания главного штрека, требуемой линии 310 выравнивания, пути 340 комбайна, линии 330 наилучшего соответствия, центральной линии 320 главного штрека, угла α пересечения, смоделированной проекции сплошного блока 210, помимо прочей информации иллюстрируемых графически, акустически, в тексте и в других форматах. Процесс 600 закольцовывается на этап 610 для постоянного определения выравнивания забоя для каждого последующего слоя сплошного блока 210.
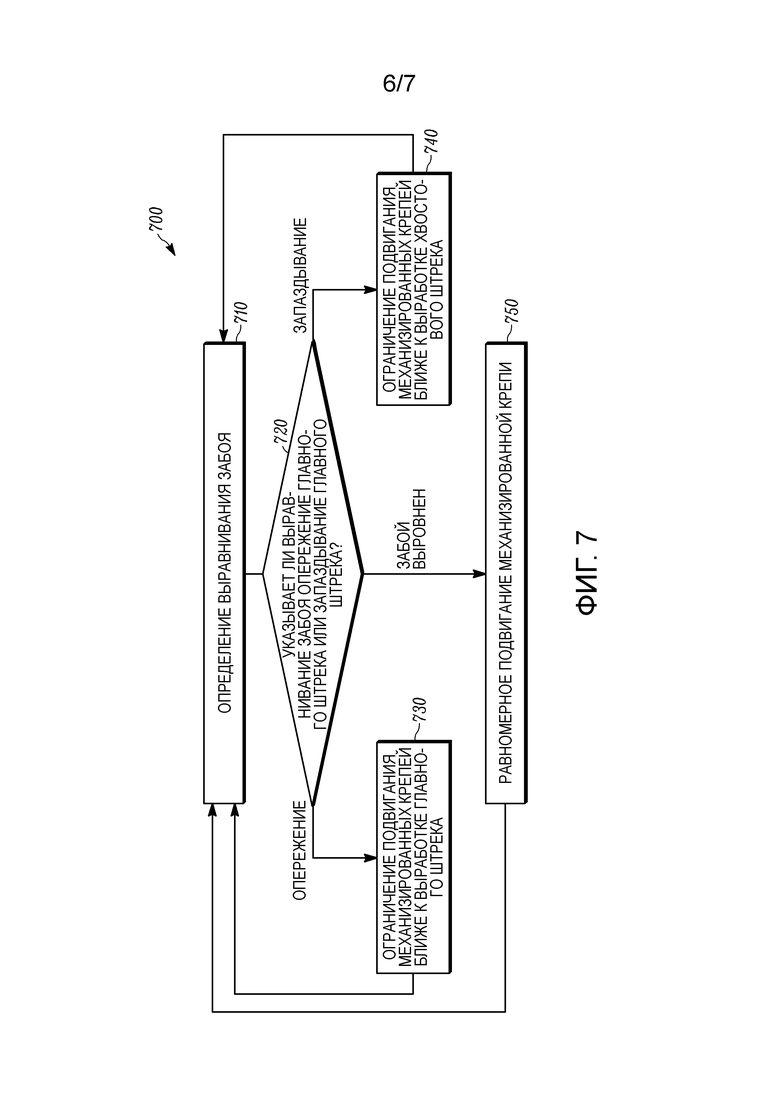
[0051] Фиг. 7 иллюстрирует процесс 700 коррекции выравнивания забоя, обнаруживаемого системой 490 управления. На этапе 710 контроллер 500 определяет выравнивание рудного забоя 240. Например, этап 710 может включать в себя исполнение процесса 600 для генерирования индикации выравнивания забоя. На этапе 720 контроллер 500 определяет, является ли выравнивание забоя опережением главного штрека, является ли выравнивание забоя запаздыванием главного штрека, или забой выравнивается на основе индикации выравнивания забоя. Как описано выше, контроллер 500 определяет, что выравнивание забоя является опережением главного штрека, когда угол α пересечения между линией 330 наилучшего соответствия и центральной линией 320 главного штрека больше 90°. Контроллер 500 определяет, что выравнивание забоя является запаздыванием главного штрека, когда угол α пересечения между линией 330 наилучшего соответствия и центральной линией 320 главного штрека меньше 90°. В тех случаях, когда угол α пересечения равен 90°, забой выровнен.
[0052] В тех случаях, когда контроллер 500 определяет, что выравнивание забоя является опережением главного штрека, контроллер 500 управляет приводом 560 для ограничения подвигания механизированных крепей 120 ближе к выработке 220 главного штрека (этап 730). В тех случаях, когда контроллер 500 определяет, что выравнивание забоя является запаздыванием главного штрека, контроллер 500 управляет приводом 560 для ограничения подвигания механизированных крепей 120 ближе к выработке 220 хвостового штрека (этап 740). В тех случаях, когда контроллер 500 определяет, что забой выравнен, контроллер 500 управляет приводом 560 для подвигания механизированных крепей 120 равномерно без ограничения подвигания механизированных крепей 120 на обоих концах (этап 750). Способ подвигания механизированных крепей 120 для коррекции выравнивания забоя подробнее описывается ниже применительно к фиг. 8А и 8В.
[0053] В процессах 600 и 700, описанных выше, приведены лишь некоторые примеры определения выравнивания рудного забоя 240. В настоящем изобретении возможны и предполагаются другие способы, формулы и методы. Следовательно, способы, формулы и методы, описанные выше, являются примерами и не предназначены для ограничения.
[0054] В некоторых вариантах осуществления электронный процессор 580 контроллера 500 определяет выравнивание забоя с использованием данных о положении, принимаемых от устройства 410 обнаружения. В некоторых вариантах осуществления контроллер 500 входит в состав устройства 410 обнаружения. В других вариантах осуществления электронный процессор может входить в состав устройства 410 обнаружения для определения выравнивания забоя. Индикация выравнивания забоя при этом передается на контроллер 500 с устройства 410 обнаружения.
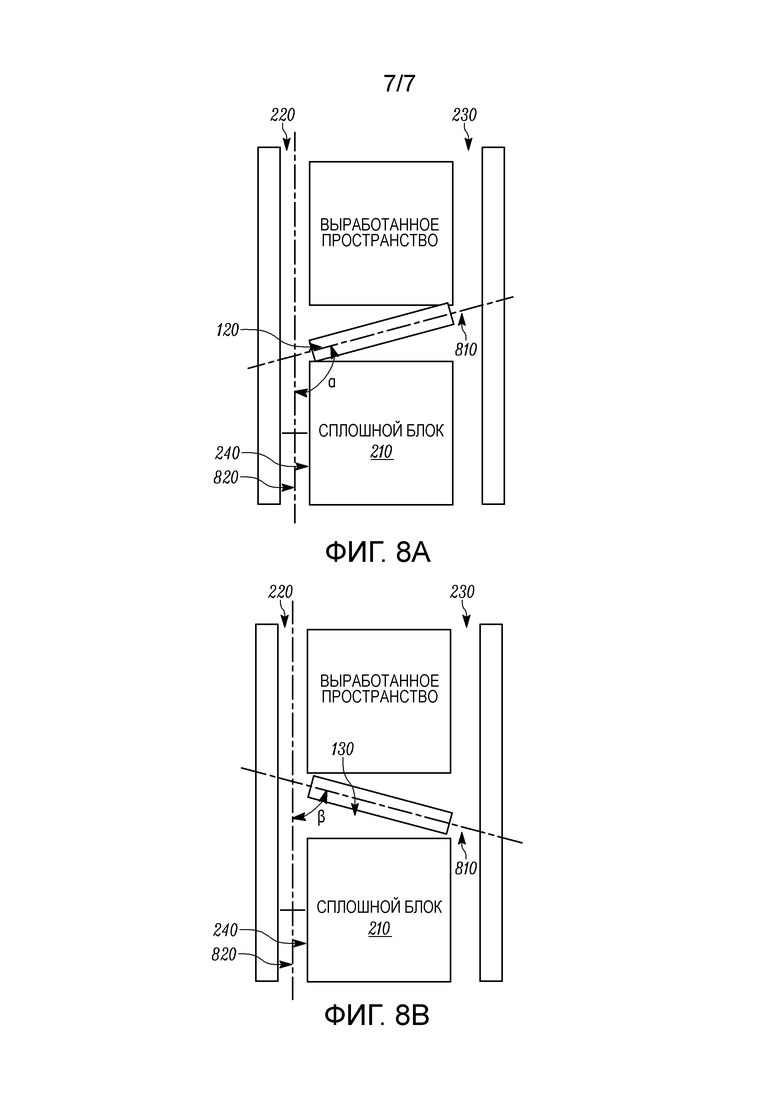
[0055] Фиг. 8А иллюстрирует пример коррекции опережения главного штрека в соответствии со способом 700 на фиг. 7. В тех случаях, когда контроллер 500 определяет, что сплошная система 100 разработки находится в состоянии опережения главного штрека (этап 720), контроллер 500 управляет приводом 560 для ограничения подвигания механизированных крепей 120 и, тем самым, забойного скребкового конвейера 130 таким образом, что крепи, расположенные ближе к выработке 230 хвостового штрека, подвигаются дальше, чем крепи, расположенные ближе к выработке 220 главного штрека (этап 730). В этой связи, механизированные крепи 120 подвигаются приводом 560 таким образом, что угол α между линией 810 наилучшего соответствия после подвигания и центральной линией 820 главного штрека уменьшается. Контроллер 500 продолжает такое подвигание для каждого слоя сплошного блока 210 до тех пор, пока выравнивание забоя, определяемое контроллером 500, не станет нейтральным.
[0056] Фиг. 8В иллюстрирует пример коррекции запаздывания главного штрека в соответствии со способом 700 на фиг. 7. В тех случаях, когда контроллер 500 определяет, что сплошная система 100 разработки находится в состоянии запаздывания главного штрека (этап 720), контроллер 500 управляет приводом 560 для ограничения подвигания механизированных крепей 120 и, тем самым, забойного скребкового конвейера 130 таким образом, что крепи, расположенные ближе к выработке 220 главного штрека, подвигаются дальше, чем крепи, расположенные ближе к выработке 230 хвостового штрека (этап 740). В этой связи, механизированные крепи 120 подвигаются приводом 560 таким образом, что угол β между линией 810 наилучшего соответствия после подвигания и центральной линией 820 главного штрека увеличивается. Контроллер 500 продолжает такое подвигание для каждого слоя сплошного блока 210 до тех пор, пока выравнивание забоя, определяемое контроллером 500, не станет нейтральным.
[0057] В тех случаях, когда контроллер 500 определяет, что выравнивание забоя является нейтральным, все крепи могут подвигаться на одинаковое расстояние. Кроме того, в некоторых вариантах осуществления контроллер 500 может быть запрограммирован для коррекции выравнивания забоя только в тех случаях, когда величина отклонения от требуемого выравнивания забоя превышает предварительно определенный порог. Кроме того, интенсивность коррекции может быть пропорциональной обнаруженной величине отклонения от идеального выравнивания забоя.
[0058] В некоторых вариантах осуществления контроллер 500 корректирует выравнивание забоя на основе сравнения пути 340 комбайна и линии 330 наилучшего соответствия. Для каждой механизированной крепи 120 контроллер 500 определяет, указывает ли соответствующее положение на пути 340 комбайна, что механизированная крепь 120 ближе к рудному забою 240, чем линия 330 наилучшего соответствия (т.е. положение, соответствующее механизированной крепи 120 на пути 340 комбайна лежит между линией 330 наилучшего соответствия и рудным забоем 240 на фиг. 3), или что механизированная крепь 120 дальше от рудного забоя 240, чем линия 330 наилучшего соответствия. В тех случаях, когда контроллер 500 определяет, что механизированная крепь 120 ближе к рудному забою 240, чем линия 330 наилучшего соответствия, контроллер 500 может ограничивать подвигание механизированной крепи 120. В тех случаях, когда контроллер 500 определяет, что механизированная крепь 120 дальше от рудного забоя 240, чем линия 330 наилучшего соответствия, контроллер 500 может подвигать механизированную крепь 120 на более значительную величину, чем другие механизированные крепи, находящиеся на рудном забое 240 или ближе к нему. Например, механизированная крепь 120, находящаяся дальше от рудного забоя 240, чем линия 330 наилучшего соответствия, может подвигаться на расстояние между путем 340 комбайна и линией 330 наилучшего соответствия в положении механизированной крепи 120.
[0059] Описанные методы используются для автоматического регулирования рудного забоя 240 путем инициирования опережения или запаздывания главного штрека или хвостового штрека с интенсивностью, требуемой для фиксации и коррекции обваливающегося забоя и автоматической коррекции искривления линии забоя путем ограничения подвигания механизированных крепей 120 дозированными величинами в соответствующих точках вдоль сплошного забоя.
[0060] Таким образом, в данном изобретении могут в целом предлагаться - помимо прочего - системы и способы для обнаружения выравнивания сплошной системы разработки и регулирования сплошной системы разработки.
Группа изобретений относится к системе, способу и контроллеру для обнаружения выравнивания забоя и регулирования забоя сплошной системы разработки для обнаружения выравнивания забоя и регулирования забоя сплошной системы разработки. Система содержит устройство обнаружения, установленное в выработке главного штрека. Первое индикаторное устройство, установленное на комбайне сплошной системы разработки для индикации положения комбайна устройству обнаружения. Контроллер, связанный с устройством обнаружения и выполненный с возможностью: определения пути комбайна по мере движения комбайна вдоль рудного забоя, причем, путь комбайна определяется на основе сигнала с первого индикаторного устройства, принимаемого устройством обнаружения, и генерирования индикации выравнивания забоя на основе пути комбайна, путем определения линии наилучшего соответствия для пути комбайна, и определения угла пересечения между линией наилучшего соответствия и линией главного штрека, проходящей вдоль выработки главного штрека. Технический результат - автоматизация определения пути комбайна по мере движения комбайна вдоль рудного забоя и генерирования индикации выравнивания 3 н. и 14 з.п. ф-лы, 9 ил.
1. Система для обнаружения выравнивания забоя сплошной системы разработки, содержащая:
устройство обнаружения, установленное в выработке главного штрека;
первое индикаторное устройство, установленное на комбайне сплошной системы разработки для индикации положения комбайна устройству обнаружения; и
контроллер, связанный с устройством обнаружения и выполненный с возможностью:
определения пути комбайна по мере движения комбайна вдоль рудного забоя, причем путь комбайна определяется на основе сигнала с первого индикаторного устройства, принимаемого устройством обнаружения, и
генерирования индикации выравнивания забоя на основе пути комбайна, путем:
определения линии наилучшего соответствия для пути комбайна; и
определения угла пересечения между линией наилучшего соответствия и линией главного штрека, проходящей вдоль выработки главного штрека.
2. Система по п. 1, дополнительно содержащая:
второе индикаторное устройство, установленное в выработке главного штрека для индикации положения линии главного штрека устройству обнаружения; и
при этом контроллер дополнительно выполнен с возможностью определения положения линии главного штрека на основе второго индикаторного устройства.
3. Система по п. 1, в которой контроллер дополнительно выполнен с возможностью:
определения того, что механизированная крепь подвинулась дальше, чем линия наилучшего соответствия; и
ограничения подвигания механизированной крепи на основе определения того, что механизированная крепь подвинулась дальше, чем линия наилучшего соответствия.
4. Система по п. 1, в которой контроллер дополнительно выполнен с возможностью:
определения того, указывает ли индикация выравнивания забоя одно из группы, состоящей из опережения главного штрека и запаздывания главного штрека;
в тех случаях, когда индикация выравнивания забоя указывает опережение главного штрека - подвигания механизированных крепей таким образом, чтобы угол подвигания составлял менее 90° относительно линии главного штрека; и
в тех случаях, когда индикация выравнивания забоя указывает запаздывание главного штрека - подвигания механизированных крепей таким образом, чтобы угол подвигания составлял более 90° относительно линии главного штрека.
5. Система по п. 1, дополнительно содержащая пользовательский интерфейс, связанный с контроллером, отличающаяся тем, что контроллер дополнительно выполнен с возможностью отображения пути комбайна и линии наилучшего соответствия на пользовательском интерфейсе сплошной системы разработки.
6. Система по п. 1, в которой устройство обнаружения выполнено с возможностью подвигаться вдоль выработки главного штрека по мере подвигания сплошной системы разработки.
7. Способ обнаружения выравнивания забоя сплошной системы разработки, включающий в себя:
прием устройством обнаружения от первого индикаторного устройства на комбайне сигнала, который свидетельствует о положении комбайна сплошной системы разработки;
определение контроллером, связанным с устройством обнаружения, пути комбайна вдоль рудного забоя, причем путь комбайна определяется на основе сигнала, принимаемого устройством обнаружения; и
генерирование контроллером индикации выравнивания забоя на основе пути комбайна, при этом генерирование индикации выравнивания забоя дополнительно включает в себя:
определение линии наилучшего соответствия пути комбайна; и
определение угла пересечения между линией наилучшего соответствия и линией главного штрека, проходящей вдоль выработки главного штрека.
8. Способ по п. 7, дополнительно включающий в себя:
прием устройством обнаружения от второго индикаторного устройства сигнала, который свидетельствует о положении линии главного штрека; и
определение контроллером положения линии главного штрека на основе сигнала от второго индикаторного устройства.
9. Способ по п. 7, дополнительно включающий в себя:
определение контроллером того, что механизированная крепь подвинулась дальше, чем линия наилучшего соответствия; и
ограничение контроллером подвигания механизированной крепи на основе определения того, что механизированная крепь подвинулась дальше, чем линия наилучшего соответствия.
10. Способ по п. 7, дополнительно включающий в себя отображение пути комбайна и линии наилучшего соответствия на пользовательском интерфейсе сплошной системы разработки.
11. Способ по п. 7, дополнительно включающий в себя:
определение контроллером того, указывает ли индикация выравнивания забоя одно из группы, состоящей из опережения главного штрека и запаздывания главного штрека;
в тех случаях, когда индикация выравнивания забоя указывает опережение главного штрека - подвигание контроллером механизированных крепей таким образом, чтобы угол подвигания составлял менее 90° относительно линии главного штрека; и
в тех случаях, когда индикация выравнивания забоя указывает запаздывание главного штрека - подвигание контроллером механизированных крепей таким образом, чтобы угол подвигания составлял более 90° относительно линии главного штрека.
12. Контроллер для обнаружения выравнивания забоя и регулирования забоя сплошной системы разработки, причем контроллер содержит электронный процессор и исполнимые команды, хранящиеся в памяти, выполненной с возможностью:
определения пути комбайна вдоль рудного забоя, причем путь комбайна определяется на основе сигнала с первого индикаторного устройства на комбайне, который принимается устройством обнаружения, связанным с контроллером и расположенным в выработке главного штрека; и
генерирования индикации выравнивания забоя на основе пути комбайна путем:
определения линии наилучшего соответствия пути комбайна; и
определения угла пересечения между линией наилучшего соответствия и линией главного штрека, проходящей вдоль выработки главного штрека.
13. Контроллер по п. 12, дополнительно содержащий исполнимые команды, хранящиеся в памяти, выполненной с возможностью определения положения линии главного штрека на основе сигнала от второго индикаторного устройства в выработке главного штрека, который принимается устройством обнаружения.
14. Контроллер по п. 12, дополнительно содержащий исполнимые команды, хранящиеся в памяти, выполненной с возможностью:
определения того, что механизированная крепь подвинулась дальше, чем линия наилучшего соответствия; и
ограничения подвигания механизированной крепи на основе определения того, что механизированная крепь подвинулась дальше, чем линия наилучшего соответствия.
15. Контроллер по п. 12, дополнительно содержащий исполнимые команды, хранящиеся в памяти, выполненной с возможностью:
определения того, указывает ли индикация выравнивания забоя одно из группы, состоящей из опережения главного штрека и запаздывания главного штрека;
в тех случаях, когда индикация выравнивания забоя указывает опережение главного штрека - подвигания механизированных крепей таким образом, чтобы угол подвигания составлял менее 90° относительно линии главного штрека; и
в тех случаях, когда индикация выравнивания забоя указывает запаздывание главного штрека - подвигания механизированных крепей таким образом, чтобы угол подвигания составлял более 90° относительно линии главного штрека.
16. Контроллер по п. 12, дополнительно содержащий исполнимые команды, хранящиеся в памяти, выполненной с возможностью отображения - на пользовательском интерфейсе, связанном с контроллером, пути комбайна и линии наилучшего соответствия.
17. Контроллер по п. 12, отличающийся тем, что индикация выравнивания забоя указывает:
опережение главного штрека в тех случаях, когда угол пересечения между линией наилучшего соответствия и линией главного штрека больше 90°, и
запаздывание главного штрека в тех случаях, когда угол пересечения между линией наилучшего соответствия и линией главного штрека меньше 90°.
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| СПОСОБ УПРАВЛЕНИЯ УГЛЕДОБЫВАЮЩИМИ КОМПЛЕКСАМИ И АГРЕГАТАМИ ПО ГИПСОМЕТРИИ И В ПЛОСКОСТИ ПЛАСТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2130119C1 |
| US 4466667 A1, 21.08.1984 | |||
| US 5020860 A1, 04.06.1991 | |||
| US 20160061035 A1, 03.03.2016. | |||

