Изобретение относится к горной промышленности и предназначено для подземной разработки угольных и пластовых месторождений.
Известен способ управления угледобывающим агрегатом в вертикальной плоскости и устройство для его осуществления, включающий отбор пробы со стороны почвы пласта, анализ ее состава с применением специального резца с отверстием и емкости для размещения пробы (1).
Недостатком способа является относительная трудоемкость и длительность взятия пробы, не позволяющие использовать способ для оперативного, непосредственного управления исполнительным органом угледобывающей машины.
Наиболее близким к изобретению является запатентованный способ контроля положения агрегата по гипсометрии и в плоскости пласта и устройство для его осуществления, включающий определение положения секций става агрегата по гипсометрии пласта относительно границы уголь-порода по крайней мере в одной точке по длине лавы и в крайних секциях става в точках выхода пласта в контуры прилегающих штреков и определение положения остальных секций става путем непрерывного замера меняющихся углов αв и αг между соседними секциями става и расчета конфигурации става в вертикальной и горизонтальной плоскостях (2).
Недостатком прототипа является неточность программы о положении пласта из-за недостаточного количества объективных точек его контроля (по крайней мере в трех точках) и неточность расчетной конфигурации става в вертикальной плоскости по углам между секций става, так как на длинных лавах до 200 м и более набегает ошибка от суммирования замеров углов до 500 - 1000 мм, что значительно превышает требование вертикального управления с присечкой породы в почве или оставления пачки угля.
Устройство для осуществления способа (2) включает датчики положения секций става в горизонтальной и вертикальной плоскостях, выполненные в виде жестких труб, моделирующих параметры става, и гибких труб меньшего диаметра, соединенных с последними жестко и плотно и имеющих два тензометрических датчика, расположенных продольно в горизонтальной плоскости друг против друга и подключенных к центральной ЭВМ, которая связана с домкратами управления агрегатом по гипсометрии.
Недостатком устройства является недостаточная точность замера углов между секциями датчика в вертикальной плоскости, что приводит к недопустимым накопленным ошибкам при расчете вертикальных координат става особенно на длинных лавах пологого падения с длиной 200 и более метров. Для целей поддержания прямолинейности става имеющаяся точность датчика вполне достаточна.
Целью изобретения является повышение точности контроля движения угледобывающих комплексов и агрегатов по гипсометрии и в плоскости пласта.
Указанная цель достигается тем, что согласно изобретению, в способе управления движением угледобывающих комплексов и агрегатов по гипсометрии и в плоскости пласта, включающем определение положения секций става в вертикальной плоскости пласта относительно границ уголь - порода по крайней мере в одной точке выхода пласта в контуры прилегающих штреков и определение положения остальных точек става в горизонтальной плоскости путем замера углов между секциями и расчета конфигурации става, обработку полученных данных в ЭВМ и выработку команд для дистанционного и автоматического управления, дополнительно определяют абсолютные координаты секций става в вертикальной плоскости во всех точках става с учетом конфигурации става в горизонтальной плоскости путем замера гидростатического давления в неподвижной жидкости в полости трубчатого гидростатического датчика, относительные по отношению к ставу координаты положения пласта в точках выходов пласта данного по времени и предыдущих циклов подвигания забоя и положение почвенных резцов по длине очистного забоя, запоминают все данные в памяти центральной ЭВМ и осуществляют расчет уравнения поверхности пласта в абсолютных координатах путем алгебраического суммирования абсолютных координат става и относительных по отношению к ставу координат положения пласта в точках данного по времени и предыдущих циклов подвигания забоя, производят математическую экстраполяцию вперед поверхности пласта в зону работы почвенных резцов исполнительного органа, определяют разность вертикальной координаты пласта и става с учетом положения почвенного резца и команды для дистанционного или автоматического управления вырабатывают с учетом сведения этой разности к нулю или к заданной величине.
Технический эффект достигается также тем, что в устройство для управления движением угледобывающих комплексов и агрегатов по гипсометрии и в плоскости пласта, содержащее датчики положения секций става в горизонтальной и вертикальной плоскостях, выполненные в виде жестких труб, моделирующих параметры става, и гибких труб меньшего диаметра, соединенных с последними жестко и плотно, на которых расположены продольно в горизонтальной плоскости друг против друга два тензодатчика, и подключенные к центральной ЭВМ, которая связана с подпружиненными домкратами управления агрегатом по гипсометрии, дополнительно снабжено датчиком положения почвенных резцов, по длине очистного забоя, подключенным к центральной ЭВМ, а датчик положения секций става в горизонтальной и вертикальной плоскостях снабжен измерителем гидростатического давления, выполненным в виде кольцевой манжеты из тонколистовой стали, на которой поперек гибкой трубы в плоскости, перпендикулярной ее оси, установлены два тензодатчика, а внутренние полости жесткой и гибкой труб заполнены неподвижной жидкостью, причем подпружиненные домкраты управления агрегатом по гипсометрии связаны с центральной ЭВМ посредством одной общей гидромагистрали управления с электроуправляемым центральным редукционным клапаном.
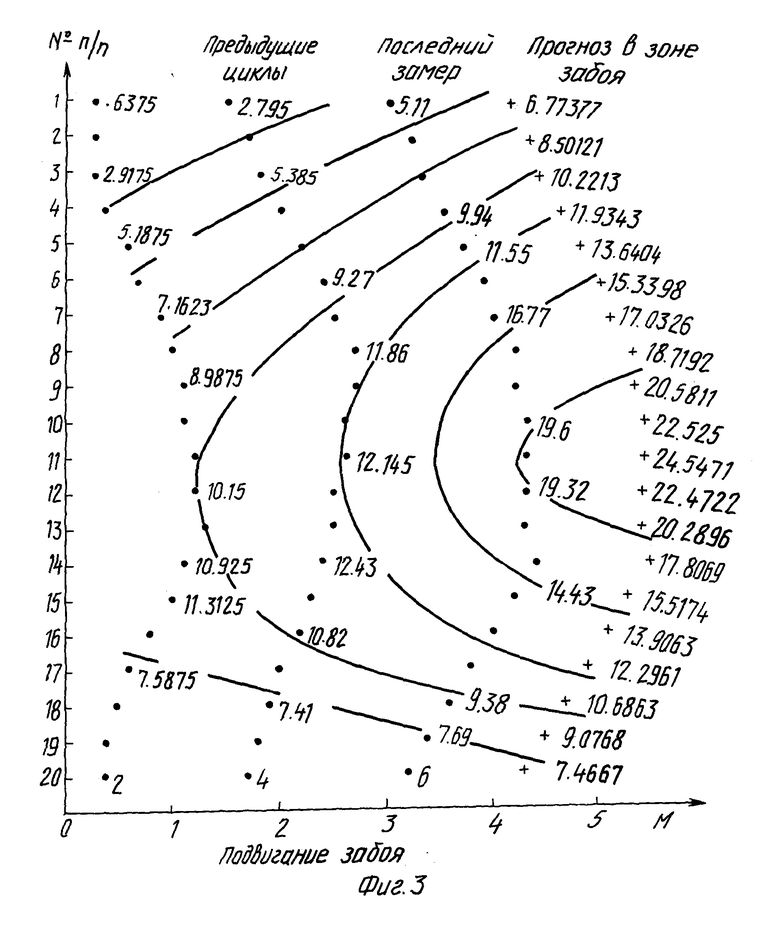
Сущность изобретения поясняется чертежом, где на фиг. 1 представлен общий вид агрегата; на фиг. 2 - сечение датчика; на фиг. 3 - фрагмент отработки программы на ЭВМ типа ДВК-3.
Агрегат состоит из става 1 с кольцевым исполнительным органом 2 с почвенными резцами 3 и крепи 4 с домкратами 5 подачи става на забой и выдвижки секций крепи. Внутри ходка агрегата размещаются датчики 6 положения секций става в горизонтальной и вертикальной плоскостях, связанные с центральным пультом управления, расположенным на штреке и имеющим в своем составе ЭВМ и систему дистанционного управления подпружиненными домкратами 7 управления по гипсометрии пласта.
Датчик 6 состоит из жестких труб 8, моделирующих параметры става, и гибких труб 9, соединенных между собой жестко и плотно, например, конической резьбой 10. На гибких трубах 9 расположены продольно в горизонтальной плоскости друг против друга два тензодатчика 11 (или группы). Дополнительно датчик 6 снабжен измерителем гидростатического давления, выполненным в виде двух тензометрических датчиков 12 (или группы) и кольцевой манжеты 13 из тонколистовой стали, поставленной на утолщенной части 14 трубы 9 с уплотнениями. При этом тензодатчики 12 установлены на манжете 13 поперек трубы 9 в плоскости, перпендикулярной ее оси. Внутренние полости жесткой 8 и гибкой 9 труб заполнены неподвижной жидкостью (эмульсия или какая-либо тяжелая жидкость, например, ртуть). Пространство под манжетой 13 сообщается с внутренней полостью труб каналом 16. По концам трубы 9 имеются полушаровые утолщения 17, обеспечивающие угловые перемещения трубы 9 относительно корпуса 18, с гайками 19 и уплотнениями 20. Штифт 21 при этом исключает проворот трубы 9 из горизонтальной плоскости. Провода 22 от всех датчиков собираются на плате 23 вместе с элементами схемы и выводятся наружу через штуцеры 24. Доступ к разводке и плате 23 обеспечивается крышкой 25.
Устройство также имеет датчик положения почвенных резцов 3 по длине очистного забоя.
Далее вся полученная информация по кабелям системы индикации 26 поступает на центральную ЭВМ, расположенную на штреке (на чертеже не показана), где обрабатывается согласно программе прогнозирования с учетом дополнительных данных, вводимых оператором агрегата и датчиком положения почвенной каретки 3 для выработки управляющей команды, поступающей к домкратам 7 управления по гидролинии 27 управления. (Давление создается электроуправляющим редукционным клапаном, на чертеже не показан).
Для осуществления способа контроля движением угледобывающих комплексов и агрегатов по гипсометрии и в плоскости пласта машинист вводит в память ЭВМ в начале каждой рабочей смены координаты крайних секций става, выходящих на оба штрека и записанных на реперах обоих штреков. Одновременно записываются в ЭВМ абсолютные координаты почвы пласта в точках выхода его в контуры штреков. Отмеченные оператором и бригадой точки выходов пород почвы, видимые визуально (таких точек может быть несколько по длине забоя: от трех до шести в среднем, на некоторых сменах может быть и ни одной) также заносятся в ЭВМ в качестве относительных координат положения почвы пласта по отношению к ставу (по высоте, по номеру секции и по отношению к ставу в направлении подвигания).
Таким образом в ЭВМ собираются данные абсолютных координат секций става по высоте в зоне штреков и остальных секций става по барометрическому давлению на них, затем несколько относительных (т.е. от става) координат пласта в точках выхода пласта в ходок. Суммируя алгебраически относительные координаты пласта с абсолютными координатами этих секций, ЭВМ получает несколько абсолютных координат точек пласта, которые запоминаются на последнем и на всех предыдущих циклах подвигания забоя.
Ввиду того, что все абсолютные точки пласта относятся к неподвижной поверхности объективно существующего пласта, они относятся к одному математическому массиву и могут поэтому статистически обрабатываться во всем полупространстве отработанного пласта и экстраполироваться на один цикл вперед, в зону работы исполнительного органа комбайна или струга.
На фиг. 3 показана в качестве примера фактическая отработка на ЭВМ ДВК-3 заданной программы. Звездочками показаны точки става в плоскости пласта в последний замер и в предыдущие циклы по показаниям датчиков 11 в горизонтальной плоскости (подсчитаны по (2)); с учетом имеющегося искривления става цифрами показаны абсолютные вертикальные координаты по барометрическому давлению, снимаемому с датчиков 12 и относительным координатам точек пласта в зоне ходка.
По последним точкам и точкам пласта в предыдущих циклах строится прогноз вперед на один цикл (точки в виде спаренных черточек).
Эти прогнозные точки пласта сравниваются с реальными точками положения почвенных резцов (эти точки равны точкам става минус точки управления), и в результате сравнения задается новое управление для автоматического или дистанционного воздействия на домкраты 7.
Источники информации, принятые во внимание:
1. SU 968386 A, E 21 C 27/00, 28.01.81.
2. SU 1814687 A3, E 21 C 27/00, 07.05.93.

Изобретение относится к горной промышленности, преимущественно к подземной разработке угольных месторождений угледобывающими комплексами и агрегатами, и служит для повышения точности контроля и управления движением комплекса или агрегата по гипсометрии и в плоскости пласта. Для этого производят определение абсолютных координат всех точек става в горизонтальной плоскости и замер абсолютных вертикальных координат с помощью определения гидростатического давления в неподвижной жидкости в полости гидростатического трубчатого датчика. Производят замер положения секций става относительно границы уголь - порода по крайней мере в одной точке по длине лавы и в крайних секциях става в точках выхода пласта в контуры прилегающих штреков. Производят расчет уравнения поверхности пласта в абсолютных координатах путем алгебраического суммирования абсолютных координат става и относительных по отношению к ставу замеров положения пласта в точках данного и предыдущих циклов подвигания забоя. Затем производят математическую экстраполяцию вперед поверхности пласта в зоне работы почвенных резцов исполнительного органа комбайна или струга. Определяют разность вертикальной координаты пласта и става с почвенным резцом и выдают информацию или команду для сведения этой разности к нулю или к заданной величине оставляемой пачки угля. Для дистанционного или автоматического управления механизмами в устройстве для реализации способа датчик имеет трубы жесткие и гибкие. В гибкой трубе имеется два продольных тензометрических датчика для измерения конфигурации става в горизонтальной плоскости и два тензодатчика для измерения гидростатического давления в плоскости, перпендикулярной оси трубы. 2 с.п.ф-лы, 3 ил.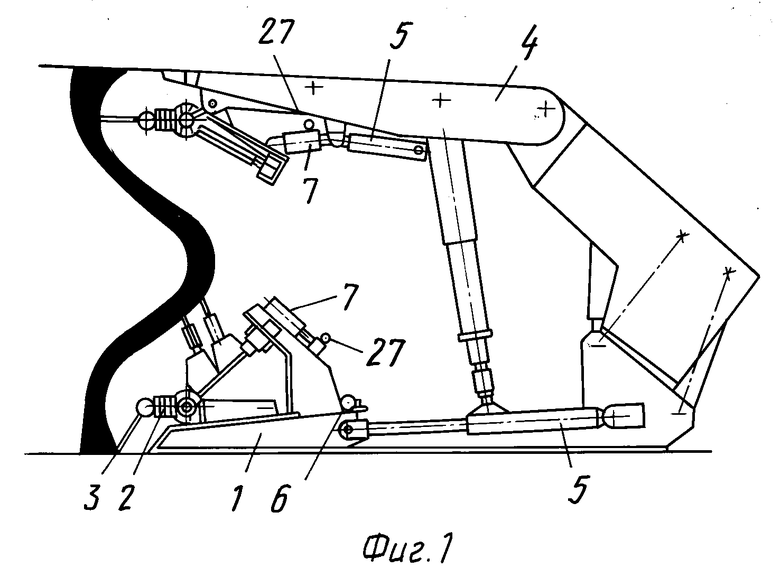
уравнения поверхности пласта в абсолютных координатах путем алгебраического суммирования абсолютных координат става и относительных по отношению к ставу координат положения пласта в точках данного по времени и предыдущих циклов подвигания забоя, производят математическую экстраполяцию вперед поверхности пласта в зону работы почвенных резцов исполнительного органа, определяют разность вертикальной координаты пласта и става с учетом положения почвенного резца по длине очистного забоя и команды для дистанционного или автоматического управления вырабатывают путем сведения этой разницы к нулю или к заданной величине.
| Способ контроля положения агрегата по гипсометрии и в плоскости пласта и устройство для его осуществления | 1990 |
|
SU1814687A3 |
| Способ управления угледобывающим агрегатом в вертикальной плоскости и устройство для его осуществления | 1981 |
|
SU968386A1 |
| Способ управления очистным комбайном и устройство для его осуществления | 1990 |
|
SU1809042A1 |
| Система автоматического управления очистным комбайном в профиле пласта | 1991 |
|
SU1809043A1 |
| Способ управления движением горно-проходческого щита | 1983 |
|
SU1158755A1 |
| Способ автоматического управления в профиле пласта угледобывающими струговыми комплексами и агрегатами фронтального действия | 1984 |
|
SU1221344A1 |
| Способ программного управления очистным комбайном в профиле пласта | 1990 |
|
SU1756557A1 |
| SU 1488470 A1, 23.06.81 | |||
| 0 |
|
SU157312A1 | |
| СИСТЕМА АВТОМАТИЧЕСКОГО ПРОГРАММНОГО УПРАВЛЕНИЯ СТРЕЛОВИДНЫМ ИСПОЛНИТЕЛЬНЫМ ОРГАНОМ КОМБАЙНА | 0 |
|
SU205763A1 |
| Устройство автоматического программного управления исполнительными органами угледобывающего комбайна по гипсометрии пласта | 1972 |
|
SU883418A1 |
| Способ автоматического управления комбайном по гипсометрии пласта и устройство для его осуществления | 1981 |
|
SU987094A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АГРЕГАТОМ ПО ГИПСОМЕТРИИ ПЛАСТА | 1991 |
|
RU2012799C1 |
| RU 94018559 A1, 27.01.96. | |||
