Область техники, к которой относится изобретение
Изобретение относится к области радиолокации и может быть использовано в импульсно-доплеровских (ИД) радиолокационных станциях (РЛС) наземного (надводного) базирования для решения задачи селекции группы движущихся воздушных объектов на фоне узкополосных пассивных помех и, в первую очередь, на фоне интенсивных отражений от подстилающей земной (водной) поверхности, местных предметов и малоподвижных метеообразований.
Уровень техники
Алгоритмы работы устройств селекции движущихся целей (СДЦ) на сегодняшний день широко известны и основаны на учете частотных отличий сигналов, отраженных от движущихся и неподвижных объектов [1]. Так, при отражении от движущихся объектов частота сигнала изменяется на величину доплеровской добавки (Fд), прямо зависящей от радиальной скорости объекта:

где νr - радиальная скорость объекта;
λ - длина волны зондирующего сигнала.
Частота же отраженного от неподвижной цели сигнала не будет отличатся от частоты зондирующего.
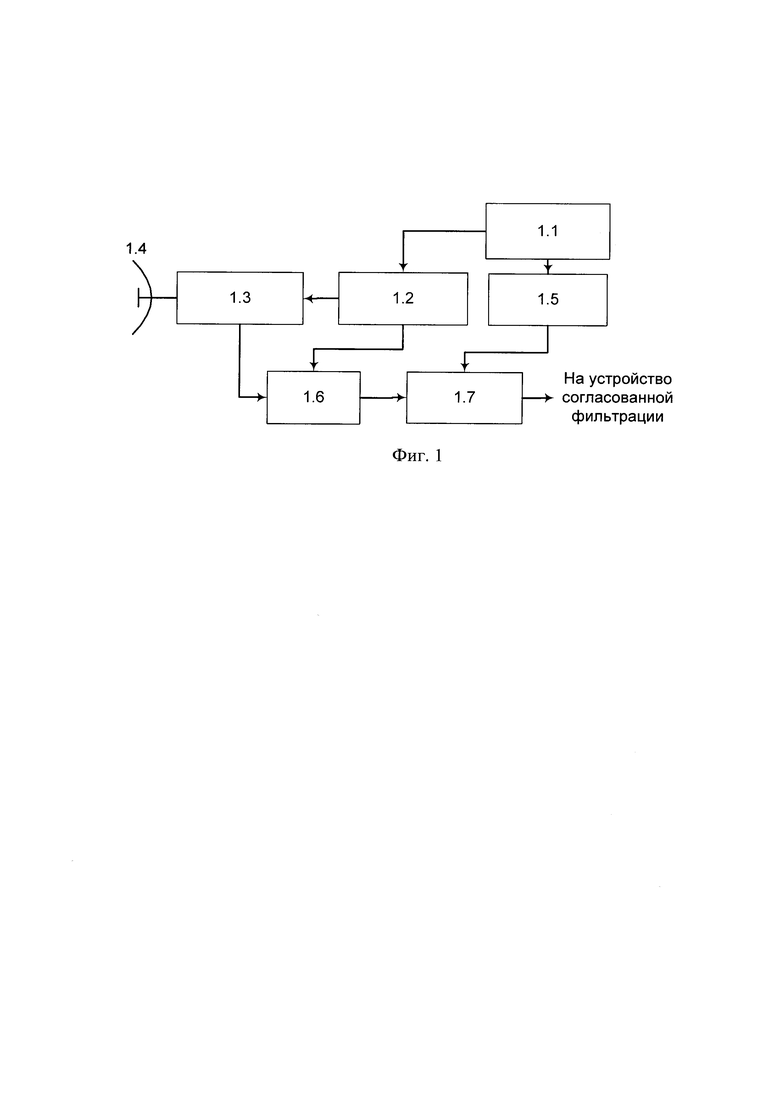
В ИД РЛС, использующих зондирующие квазинепрерывные сигналы (КНС), применяется способ СДЦ на основе режекторного фильтра (РФ), принятый в качестве прототипа [1]. Указанный способ обеспечивает подавление сигнала (помехи), отраженного от неподвижных объектов и выделение полезного (имеющего частотную доплеровскую добавку) сигнала с помощью РФ в одном цикле зондирования цели, под которым понимается формирование и излучение КНС в пространство, прием отраженного сигнала и его обработка [1]. Суть указанного способа заключается в следующем (см. фиг. 1):
1) Выбор параметров зондирующего сигнала (блок 1.1);
2) Формирование зондирующего сигнала (блок 1.2) и его излучение (блоки 1.3 и 1.4);
3) Определение и установка параметров РФ (блок 1.5);
4) Перенос принимаемых сигналов на промежуточную частоту (блок 1.6);
5) Фильтровое подавление помехи в области нулевых доплеровских и кратных частоте повторения импульсов (ЧПИ) частот и выделение полезного сигнала в области доплеровских частот.
Однако, при использовании зондирующих сигналов с линейной частотной модуляцией (ЛЧМ) реализация СДЦ на основе РФ имеет особенности. Так, частота принятого сигнала в процессе переноса на промежуточную частоту возрастает на величину дальномерной частоты (ƒдальн), которая прямо пропорциональна расстоянию от РЛС до отражающего предмета [2]:

где Δƒ - девиация частоты зондирующего КНС;
rц - дальность до цели;
с - скорость распространения радиоволн;
τс - длительность сигнала.
Отмеченная особенность негативно сказывается на эффективности СДЦ при работе ИД РЛС в приземной области пространства, когда отражения от подстилающей поверхности имеют величину дальномерной частоты (2) соизмеримую с доплеровской добавкой (1). В [3] отмечено, что в таком случае ухудшается помехоустойчивость при первичной дальнометрии в ИД РЛС и одновременно предложено решение этой проблемы, особенностью которого является применение зондирующего КНС с ЛЧМ с крутизной (Р):

где F - ЧПИ зондирующего КНС.
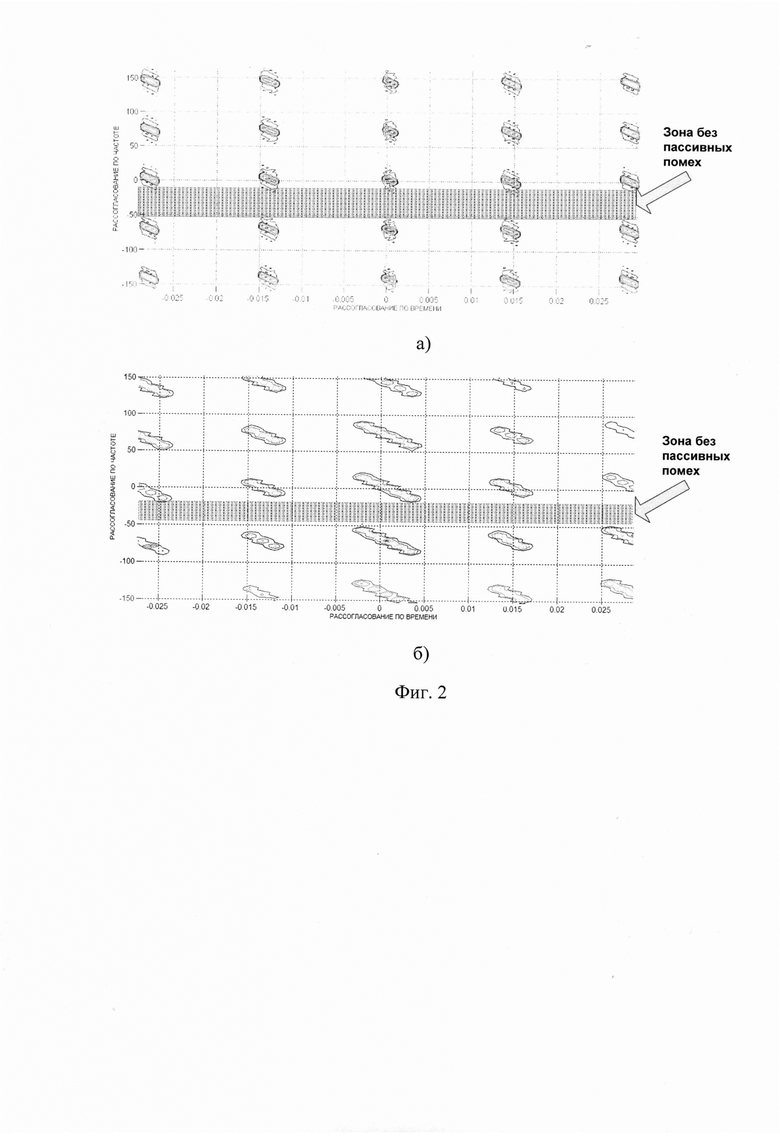
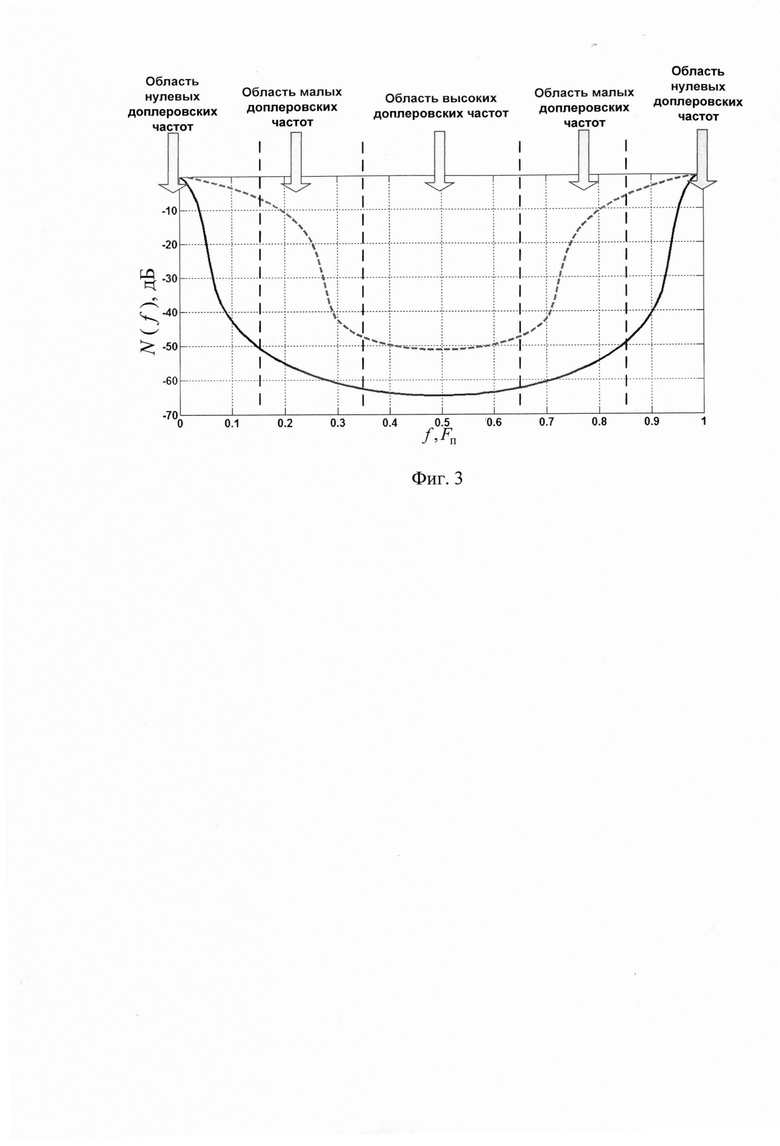
Такой подход обеспечивает сосредоточение сигналов (помех), отраженных от неподвижных предметов в окрестностях нулевой и кратной ЧПИ (Fп) частот, не зависимо от дальности до отражающих объектов, что демонстрируют фиг. 2а и фиг. 3 (сплошная линия).
Однако, отмеченное решение не всегда эффективно. Например, при работе по низко летящим малозаметным объектам. Так, их качественное обнаружение требует повышения энергетического потенциала РЛС, реализуемое, при фиксированной средней мощности передатчика, как правило, за счет уменьшения скважности сигнала. Уменьшение скважности отмеченного КНС с крутизной ЛЧМ (3), как за счет увеличения длительности импульса, так и уменьшения периода их следования, влечет за собой возрастание девиации частоты в каждом из импульсов - меняется структура амплитудно-частотного спектра сигнала. Такие изменения приводят к появлению отражений от неподвижных объектов уже не только в окрестностях нулевой и кратной ЧПИ областей частот, но и в областях малых доплеровских частот как показано на фиг.2б и 3 (пунктирная линия). Т.е. элементы пассивных помех (ПП) выходят за пределы зоны подавления РФ. Поэтому эхо-сигналы от малоскоростных целей будут маскироваться ПП.
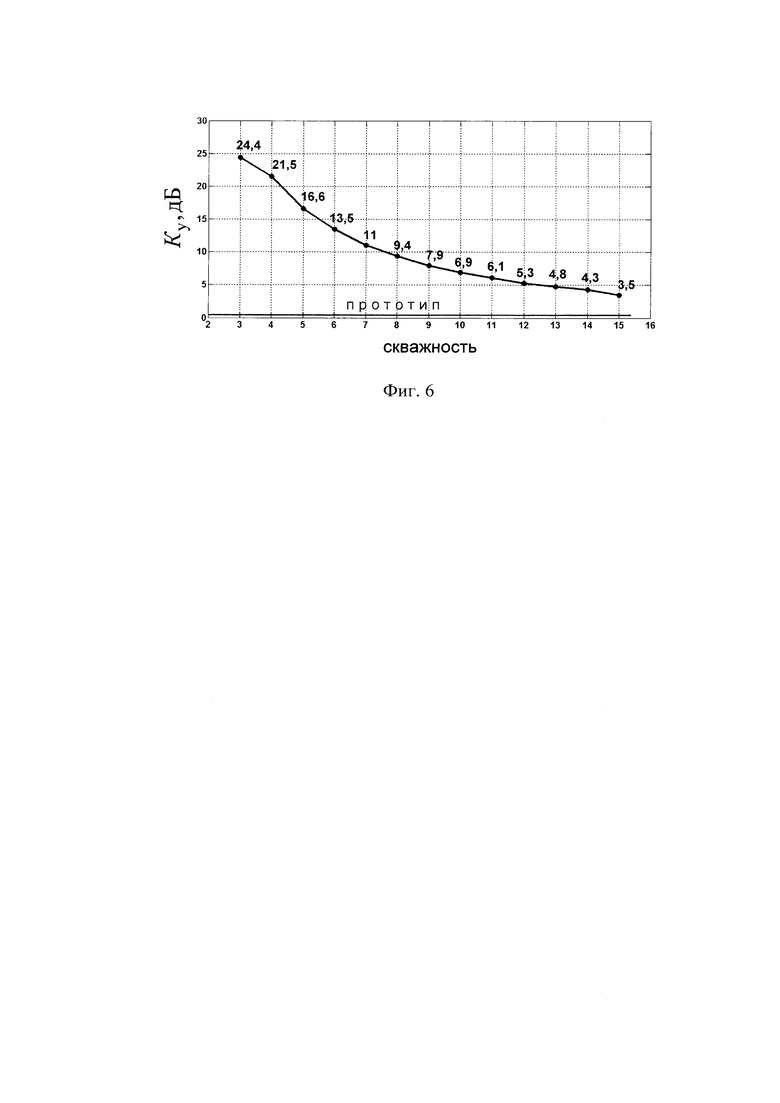
Таким образом, работа ИД РЛС в режиме КНС малой скважности с ЛЧМ с параметрами (3) повлечет снижение показателей качества устройства СДЦ, реализующего выбранный в качестве прототипа способ. Одним из таких показателей является коэффициент улучшения отношения сигнала и помехи (Ку):

где  - отношение сигнала и помехи на выходе и входе устройства СДЦ соответственно. Значение показателя (4) для прототипа будет равно единице, т.е. 0 дБ (см. фиг. 6).
- отношение сигнала и помехи на выходе и входе устройства СДЦ соответственно. Значение показателя (4) для прототипа будет равно единице, т.е. 0 дБ (см. фиг. 6).
Раскрытие сущности изобретения
Технической задачей, решаемой разработанным способом, является повышение помехоустойчивости ИД РЛС при зондировании КНС малой скважности с ЛЧМ.
Технический результат, обеспечивающий решение поставленной технической задачи, достигается тем, что в способе селекции движущихся целей в режиме высокой частоты повторения импульсов зондирующего линейно-частотно-модулированного сигнала с малой скважностью, который заключается в выборе параметров зондирующего сигнала, его формировании и зондировании, выборе и установке параметров режекторного фильтра, переносе принимаемых сигналов на промежуточную частоту, фильтровом подавлении помехи в области нулевых доплеровских и кратных частоте повторения импульсов частот и выделение полезного сигнала в области доплеровских частот, согласно изобретения, выбор параметров зондирующего сигнала, его формирование и излучение, определение и установка параметров режекторного фильтра, перенос принимаемых сигналов на промежуточную частоту, производятся два раза, при этом подавление помехи в режекторном фильтре в областях нулевых, малых доплеровских и кратных частоте повторения импульсов частот и выделение полезного сигнала в области высоких доплеровских частот производится в первом цикле зондирования, а подавление помехи в режекторном фильтре в областях нулевых, высоких доплеровских и кратных частоте повторения импульсов частот и выделением полезного сигнала в области малых доплеровских частот - во втором цикле зондирования.
Физическая суть предлагаемого способа заключается в следующем.
Качество работы устройств защиты от ПП определяет правильный выбор параметров частотной характеристики устройства СДЦ K(ƒ), которая жестко связана с частотной структурой помехи:

где С - целое число;
N(ƒ) - спектральная плотность мощности помехи.
В свою очередь параметры ПП, являющейся следствием отражения зондирующего сигнала от неподвижных мешающих радиолокационному наблюдению объектов, зависят от параметров последнего. Таким образом, очевидна связь параметров зондирующего сигнала с характеристиками устройств СДЦ, которая объясняет решение поставленной задачи путем параметрической оптимизации зондирующего КНС малой скважности с ЛЧМ.
На первом этапе, согласно способа, производится выбор оптимальных параметров зондирующего КНС в соответствии с (3), его формирование и излучение.
Следующим этапом является определение и установка параметров РФ согласно (5), что производится в соответствии с известной аналитической моделью двумерной функции рассогласования рассматриваемого КНС для вычисления спектрального уровня нормированной мощности профильтрованных помеховых сигналов [5, 6]:

где ⏐ρ(τ,0)⏐ - функция рассогласования сигнала;
ƒ - величина частотного рассогласования;
τ - величина временного рассогласования.
При этом для периодических сигналов (N(ƒ)) рассчитывается в пределах одной частоты следования импульсов (Fп). Произведенный расчет мощности ПП (6) показал, что для зондирующего КНС малой скважности с крутизной ЛЧМ (3) максимальная мощность помехи (N(ƒ)) сосредоточена в области нулевой, малых доплеровских частот и частотах, кратных ЧПИ, а минимальный в области высоких доплеровских частот, как показано на фиг. 3 (пунктирная линия) и фиг. 4 (пунктирная линия).
На следующем этапе принимаемые сигналы переносятся на промежуточную частоту.
Следующий шаг состоит в подавлении помехи в режекторном фильтре в областях нулевых, низких доплеровских и кратных частоте повторения импульсов частот и выделение полезного сигнала в области высоких доплеровских частот.
Поскольку в соответствии с (5) параметры РФ подавляют помеху в области малых доплеровских частот, то полезный сигнал при его наличии в этом диапазоне тоже будет подавлен. Поэтому необходимо выполнить еще один цикл зондирования цели, но с другими параметрами ЗС, так, на следующем этапе способа принимается решение об изменении параметров зондирующего сигнала.
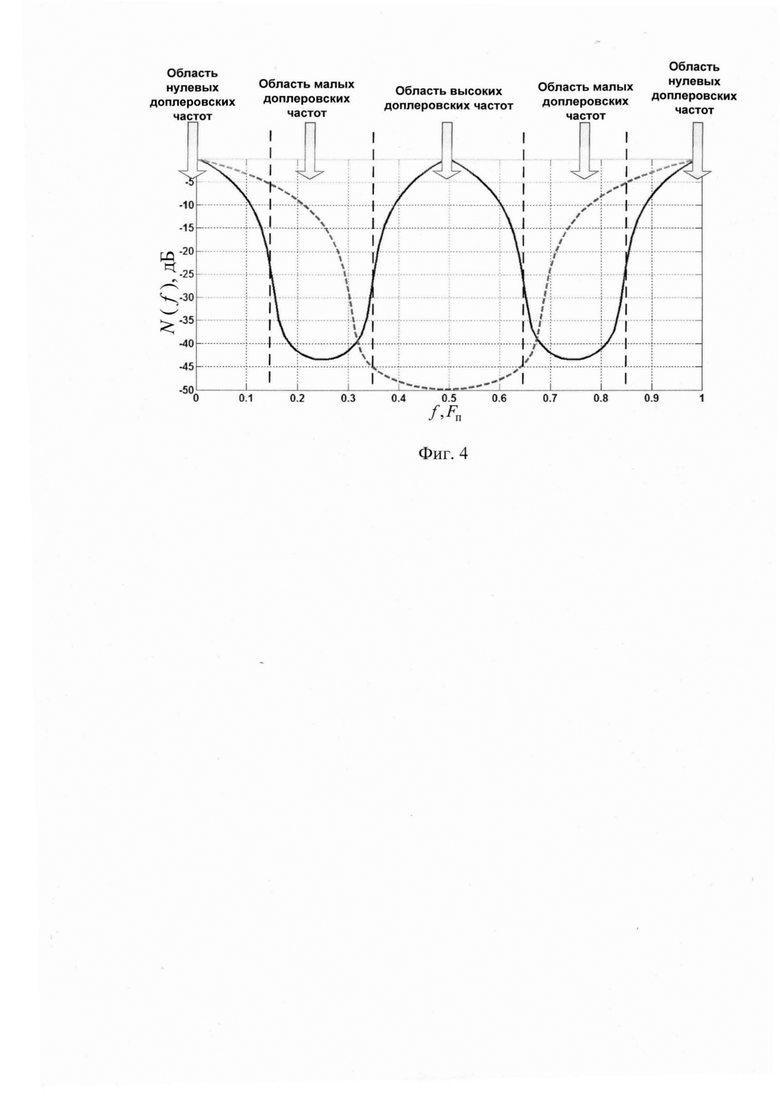
Дальнейший шаг состоит в изменении и повторном выборе оптимальных параметров зондирующего КНС. Так установлено, что области малых доплеровских частот не заняты ПП при крутизне (β1) ЛЧМ зондирующего КНС малой скважности, равной половине квадрата ЧПИ 

Области нулевой и кратных ЧПИ частот при (7) также являются помехонасыщенными, что иллюстрирует фиг. 4 (сплошная линия). Т.е. спектры сигналов (помех), отраженные от неподвижных предметов с параметрами (3) и (7) разнесены между собой и занимают малые для (3) и высокие для (7) области доплеровских частот (фиг.4).
Формирование и излучение в пространство КНС с параметрами (7) последовательно осуществляется на следующем этапе изобретения.
Повторная установка параметров РФ согласно (5) обеспечивает подавление ПП и выделение полезного сигнала в области малых доплеровских частот.
На следующем этапе принимаемые сигналы переносятся на промежуточную частоту.
На заключительном этапе изобретения производится подавление помехи в РФ в областях нулевых, высоких доплеровских и кратных ЧПИ частот и выделение полезного сигнала в области низких доплеровских частот.
Краткое описание чертежей
Изобретение поясняется рисунками, представленными на фиг. 1-6 раскрывающими принципы работы устройств СДЦ, сущность изобретения и параметрической оптимизации КНС и достигаемый ей эффект, а также физику и закономерности линейно-сдвиговой деформации функции рассогласования КНС при ЛЧМ при уменьшении его скважности.
На фиг. 1 показана блок-схема устройства СДЦ, приняты следующие обозначения:
1.1. Блок выбора параметров зондирующего сигнала;
1.2. Блок формирования зондирующего сигнала;
1.3. Блок антенного переключателя;
1.4. Приемо-передающая антенна;
1.5. Блок выбора параметров РФ;
1.6. Блок смесителя;
1.7. Блок подавления ПП.
На фиг. 2а изображено сечение функции рассогласования КНС с ЛЧМ малой скважности. Видны контуры областей высокой корреляции двумерной ФН КНС с ЛЧМ крутизной  наблюдается наличие свободной от пассивных помех зоны в области как малых, так и высоких доплеровских частот, что позволяет эффективно использовать системы СДЦ. На фиг. 2б показан эффект «расползания» локальных максимумов ФН КНС с ЛЧМ при уменьшении его скважности, что приводит к значительному сужению безпомехового спектрального диапазона ввиду появления ПП на малых доплеровских частотах.
наблюдается наличие свободной от пассивных помех зоны в области как малых, так и высоких доплеровских частот, что позволяет эффективно использовать системы СДЦ. На фиг. 2б показан эффект «расползания» локальных максимумов ФН КНС с ЛЧМ при уменьшении его скважности, что приводит к значительному сужению безпомехового спектрального диапазона ввиду появления ПП на малых доплеровских частотах.
На фиг. 3 графики функции, характеризующей частотно-скоростную избирательность корреляционно-фильтрового приемника ИД РЛС для КНС с ЛЧМ (сплошная) и в случае уменьшения его скважности (пунктирная) приведены на фиг.3а и 3б соответственно, иллюстрирующие тот же эффект, что и представлен на фиг. 2.
На фиг. 4 показан результат параметрической оптимизации зондирующего сигнала. Графики функции, характеризующей частотно-скоростную избирательность корреляционно-фильтрового приемника ИД РЛС для КНС малой скважности с ЛЧМ для ее крутизны  (пунктирная) и
(пунктирная) и  (сплошная) свидетельствуют о существовании взаимонепересекающихся спектральных областей с низким уровнем мощности помехи для каждого из анализируемых сигналов.
(сплошная) свидетельствуют о существовании взаимонепересекающихся спектральных областей с низким уровнем мощности помехи для каждого из анализируемых сигналов.
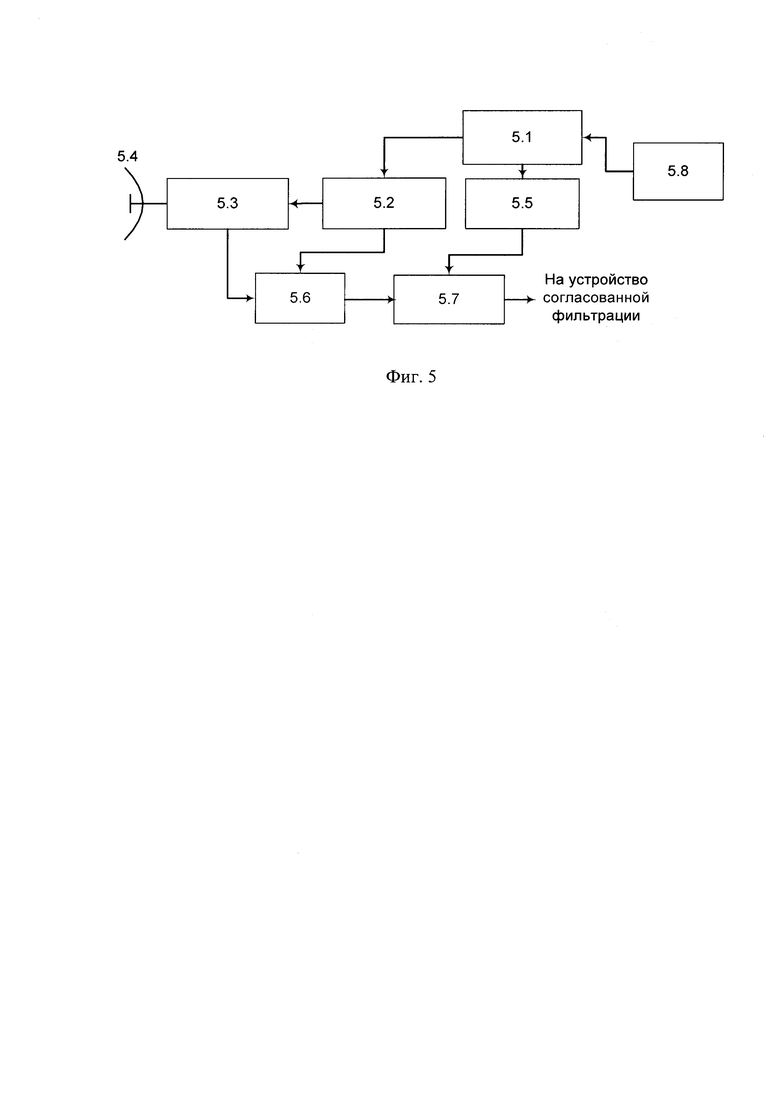
На фиг. 5 показана блок-схема устройства, реализующего «Способ селекции движущихся целей в режиме высокой частоты повторения импульсов зондирующего линейно-частотно-модулированного сигнала с малой скважностью». На фиг. 5 приняты следующие обозначения:
5.1. Блок выбора параметров зондирующего сигнала;
5.2. Блок формирования зондирующего сигнала;
5.3. Блок антенного переключателя;
5.4. Приемо-передающая антенна;
5.5. Блок выбора параметров РФ;
5.6. Блок смесителя;
5.7. Блок подавления ГШ;
5.8. Блок принятия решения об изменении параметров зондирующего сигнала.
На фиг. 6 показана зависимость коэффициента улучшения отношения сигнала и помехи от скважности зондирующего КНС с ЛЧМ для предлагаемого способа.
Осуществление изобретения
Осуществление изобретения возможно с помощью блок-схемы, представленной на фиг. 5, и заключается в последовательном выполнении следующих операций:
- выбор зондирующего КНС и установка его параметров, в том числе крутизны ЛЧМ в соответствии с (3) (фиг. 5 блок 5.1);
- формирование зондирующего КНС малой скважности с ЛЧМ (фиг. 5 блок 5.2);
- излучение сформированного зондирующего КНС с ЛЧМ (фиг. 5 блоки 5.3 и 5.4);
- установка параметров частотной характеристики РФ (фиг. 5 блок 5.5) в соответствии с выражением (5);
- прием антенной отраженных сигналов и дальнейший перенос их на промежуточную частоту (фиг. 5 блок 5.6);
- подавление помехи в РФ в областях нулевых, низких доплеровских и кратных ЧПИ частот и выделение полезного сигнала в области высоких доплеровских частот (фиг. 5 блок 5.7);
- принятие решения об изменении параметров зондирующего сигнала (фиг. 5 блок 5.8);
- выбор зондирующего КНС и установка его параметров (фиг. 5 блок 5.1), в том числе крутизны ЛЧМ в соответствии с (7);
- формирование зондирующего КНС малой скважности с ЛЧМ (фиг. 5 блок 5.2);
- излучение сформированного зондирующего КНС с ЛЧМ (фиг. 5 блоки 5.3 и 5.4);
- установка параметров частотной характеристики РФ (фиг. 5 блок 5.5) в соответствии с выражением (5);
- прием антенной отраженных сигналов и дальнейший перенос их на промежуточную частоту (фиг. 5 блок 5.6);
- подавление помехи в РФ в областях нулевых, высоких доплеровских и кратных ЧПИ частот и выделение полезного сигнала в области низких доплеровских частот (фиг. 5 блок 5.7).
Предлагаемый способ технически реализуем и обеспечивает недоступную для аналогов и прототипа возможность эффективной селекции движущихся целей в ИД РЛС при зондировании КНС малой скважности с ЛЧМ. Изобретение апробировано на ПЭВМ в виде математической имитационно-стохастической модели процесса селекции движущихся целей в ИД РЛС [4] и может быть применено в ИД РЛС для решения задач обнаружения группы малозаметных целей в условиях пассивных помех с локально-сосредоточенным энергетическим спектром, и прежде всего, в условиях воздействия интенсивных маскирующих отражений от подстилающей поверхности, местных предметов и малоподвижных метеообразований.
Заявленный технический результат подтвержден результатами, полученными методом имитационного моделирования в пакете прикладных программ MATLAB.
Исходные данные для моделирования:
1. Вид зондирующего сигнала: КНС с ЛЧМ;
2. Крутизна ЛЧМ зондирующего КНС изменяется в соответствии с (3) и (7);
3. Скважность зондирующего сигнала изменяется от 3 до 15;
4. Входные мощности сигнала и помехи равны;
Далее рассчитывались мощности сигнала и помехи на выходе РФ и производилась оценка коэффициента улучшения отношения сигнала и помехи в соответствии с (4).
Таким образом, разработанный способ селекции движущихся целей в режиме высокой частоты повторения импульсов зондирующего линейно-частотно-модулированного сигнала с малой скважностью основан на алгоритме оптимальной фильтрации сигнала в условиях воздействия небелого шума, но, в отличие от прототипа, предусматривает выделение полезного сигнала на помехонасыщенных участках частот за счет вобуляции крутизны ЛЧМ зондирующего КНС, что позволяет улучшить отношение сигнала и помехи до 24 дБ (фиг. 6).
Список используемой литературы
1. Справочник по радиолокации /Под ред. М.И. Сколника. Пер. с англ. Под общей ред. B.C. Вербы. В 2 книгах. Книга 1. М.: Техносфера, 2015. - 672 с. (с. 40-41, 186, 207-211).
2. Радиолокационные сигналы и их применение [Текст] / А.А. Трухачев. - М.: Воениздат.2005. - 234 с. (с. 237-238).
3. Способ однозначной первичной дальнометии группы целей на фоне узкополосных пассивных помех в режиме высокой частоты повторения импульсов зондирующего сигнала: патент на изобретение / С.А. Зайцев, A.M. Лаврентьев, А.А. Кириченко. - №2756034 от 24.09.2021.
4. Модель процесса селекции движущихся целей в импульсно-доплеровской радиолокационной станции: свидетельство о государственной регистрации программ для ЭВМ / Ю.В. Денищик, A.M. Лаврентьев, С.А. Зайцев заявители и правообладатели Ю.В. Денищик, A.M. Лаврентьев, С.А. Зайцев. - №2021665594; заявл. 20.09.2021; зарегистр. 29.09.2021.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПЕРВИЧНОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С МАЛОЙ СКВАЖНОСТЬЮ ЗОНДИРУЮЩИХ ПОСЫЛОК | 2020 |
|
RU2742461C1 |
| СПОСОБ ПЕРВИЧНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ НА ФОНЕ УЗКОПОЛОСНЫХ ПАССИВНЫХ ПОМЕХ | 2016 |
|
RU2641727C1 |
| Способ однозначной первичной дальнометрии группы целей на фоне узкополосных пассивных помех в режиме высокой частоты повторения импульсов зондирующего сигнала | 2020 |
|
RU2756034C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ПАССИВНЫХ ПОМЕХ | 2012 |
|
RU2513868C2 |
| СПОСОБ ФОРМИРОВАНИЯ ФИКСИРОВАННОЙ СПЕКТРАЛЬНОЙ ЗОНЫ, СВОБОДНОЙ ОТ ПОМЕХ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ В БОРТОВЫХ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАТОРАХ | 2023 |
|
RU2834733C1 |
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2449307C2 |
| СПОСОБ И УСТРОЙСТВО ЗАЩИТЫ ОТ "АНГЕЛОВ" ПРИ КОМПЛЕКСИРОВАНИИ РЛС РАЗНЫХ ДИАПАЗОНОВ | 2017 |
|
RU2666783C1 |
| СПОСОБ СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1993 |
|
RU2054693C1 |
| Радиолокационный способ обнаружения малозаметных целей в импульсно-доплеровской РЛС с ФАР | 2019 |
|
RU2711115C1 |
| РАДИОЛОКАТОР С ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИЕЙ ЗОНДИРУЮЩЕГО СИГНАЛА | 1993 |
|
RU2060514C1 |
Изобретение относится к области радиолокации и может быть использовано в импульсно-доплеровских (ИД) радиолокационных станциях (РЛС) наземного (надводного) базирования для решения задачи селекции группы движущихся воздушных объектов на фоне узкополосных пассивных помех и, в первую очередь, на фоне интенсивных отражений от подстилающей земной (водной) поверхности, местных предметов и малоподвижных метеообразований. Техническим результатом изобретения является повышение помехоустойчивости ИД РЛС при зондировании квазинепрерывными сигналами (КНС) малой скважности с линейной частотной модуляцией (ЛЧМ). В способе селекции движущихся целей в режиме высокой частоты повторения импульсов зондирующего линейно-частотно-модулированного сигнала с малой скважностью выбор параметров зондирующего сигнала, его формирование и излучение, определение и установка параметров режекторного фильтра, перенос принимаемых сигналов на промежуточную частоту производятся два раза. Подавление помехи в режекторном фильтре в областях нулевых, малых доплеровских и кратных частоте повторения импульсов частот и выделение полезного сигнала в области высоких доплеровских частот производится в первом цикле зондирования, а подавление помехи в режекторном фильтре в областях нулевых, высоких доплеровских и кратных частоте повторения импульсов частот и выделение полезного сигнала в области малых доплеровских частот - во втором цикле зондирования. 6 ил.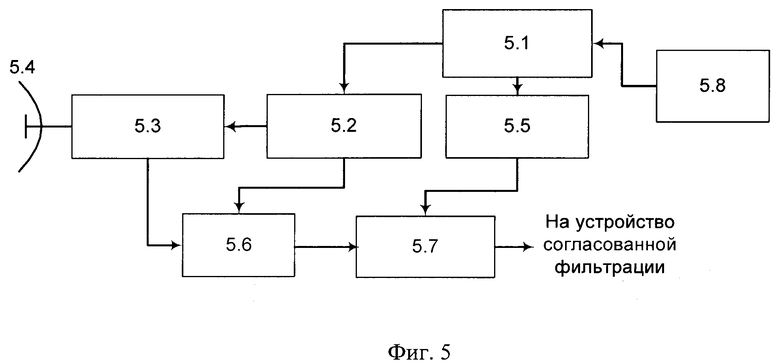
Способ селекции движущихся целей в режиме высокой частоты повторения импульсов зондирующего линейно-частотно-модулированного сигнала с малой скважностью, заключающийся в выборе параметров зондирующего сигнала, его формировании и зондировании, выборе и установке параметров режекторного фильтра, переносе принимаемых сигналов на промежуточную частоту, фильтровом подавлении помехи в области нулевых доплеровских и кратных частоте повторения импульсов частот и выделении полезного сигнала в области доплеровских частот, отличающийся тем, что выбор параметров зондирующего сигнала, его формирование и излучение, определение и установка параметров режекторного фильтра, перенос принимаемых сигналов на промежуточную частоту производятся два раза, при этом подавление помехи в режекторном фильтре в областях нулевых, малых доплеровских и кратных частоте повторения импульсов частот и выделение полезного сигнала в области высоких доплеровских частот производится в первом цикле зондирования, а подавление помехи в режекторном фильтре в областях нулевых, высоких доплеровских и кратных частоте повторения импульсов частот и выделение полезного сигнала в области малых доплеровских частот - во втором цикле зондирования.
| CN 108761410 A, 06.11.2018 | |||
| СПОСОБ ПЕРВИЧНОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С МАЛОЙ СКВАЖНОСТЬЮ ЗОНДИРУЮЩИХ ПОСЫЛОК | 2020 |
|
RU2742461C1 |
| CN 114814817 A, 29.07.2022 | |||
| СПОСОБ ОБНАРУЖЕНИЯ, ИЗМЕРЕНИЯ ДАЛЬНОСТИ И СКОРОСТИ НИЗКОЛЕТЯЩЕЙ МАЛОСКОРОСТНОЙ ЦЕЛИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ ПРИ ВЫСОКОЙ ЧАСТОТЕ ПОВТОРЕНИЯ ИМПУЛЬСОВ И ИНВЕРТИРУЕМОЙ ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИИ | 2017 |
|
RU2697509C2 |
| US 2020233076 A1, 23.07.2020 | |||
| Способ однозначной первичной дальнометрии группы целей на фоне узкополосных пассивных помех в режиме высокой частоты повторения импульсов зондирующего сигнала | 2020 |
|
RU2756034C1 |
