Изобретение относится к конструкции держателя балочного многозамкового универсального вертолетного, который может быть использован для применения на объектах авиационной техники.
Изделие позволяет обеспечить подвеску, транспортировку и сброс всей номенклатуры штатных грузов, допущенных для применения, а так же новых типов грузов, которые требуют наличия на держателе дополнительных электрических жгутов обеспечивающих электрическую связь бортовой аппаратуры объекта с грузом.
Известны вертолетные многозамковые кассетные и балочные держатели, применяемые для подвески, транспортировки и сброса грузов: КД2-325 с замками Дер2-47 и МБД2-67У, работающий через переходной держатель БД3-57КР-ВМ. Изделия КД2-325 и МБД2-67У выбраны предварительно в качестве прототипов.
Конструкция и принцип работы этих держателей описан в руководстве по технической эксплуатации на кассетный держатель КД2-325РЭ и техническом описании на замок Дер2-47ТО и техническом описании на многозамковый балочный держатель МБД2-67У ТО и ИЭ.
При анализе конструкций данных изделий выявлены ряд существенных недостатков которые исключают возможность их применения под новые типы грузов.
В конструкции изделий не реализованы: - в держателе КД2-325 применение грузов с электропиротехническими устройствами работающими через механизмы подачи импульса;
- в держателе МБД2-67У отсутствует одиночный сброс грузов. Сброс грузов осуществляется с пиротехнических замков последовательно через определенно заданный интервал времени от блока БИ-ЗМ.
Изделия не оснащены транзитными электрическими жгутами которые должны обеспечивать электрическую связь бортовой аппаратуры объекта с грузом.
Схемные решения держателей не обеспечивают программирование сигнала с бортовой аппаратуры на электропиротехнические устройства (далее ЭПУ) через механизмы подачи импульса (далее МПИ).
После проведенного анализа конструкций держателей в качестве базового прототипа принят кассетный держатель КД2-325 с замком Дер2-47.
Технической задачей, на решение которой направлено предполагаемое изобретение, является создание конструкции держателя балочного многозамкового позволяющего получить технический результат, проявляющийся в:
- расширении номенклатуры подвешиваемых грузов;
- обеспечении возможности подвески, транспортировки и сброса четырех грузов;
- обеспечении режимов: одиночного сброса грузов при боевом срабатывании и аварийного сброса грузов со всех станций держателя;
- обеспечении подвески управляемых видов авиационного вооружения: грузов массой 120 кг (далее груз №1), грузов массой 110 кг (далее груз №2) через дополнительные электрические жгуты, обеспечивающие электрическую связь бортовой аппаратуры объекта с грузами. Получение указанного технического результата реализовано в конструкции нового держателя.
Держатель балочный многозамковый универсальный вертолетный, используемый для подвески, транспортировки и сброса грузов состоит:
- из силового корпуса - рамы таврового сечения на которой установлены два кассетных держателя с замками, блок механизмов МПИ, позволяющий применить новую номенклатуру грузов с ЭПУ;
- обтекателей аэродинамической формы;
- электрических жгутов, обеспечивающих электрическую связь бортовой аппаратуры с изделием и подвешенными грузами (систем управляемого авиационного вооружения).
Сущность предлагаемого изобретения поясняется изображениями.
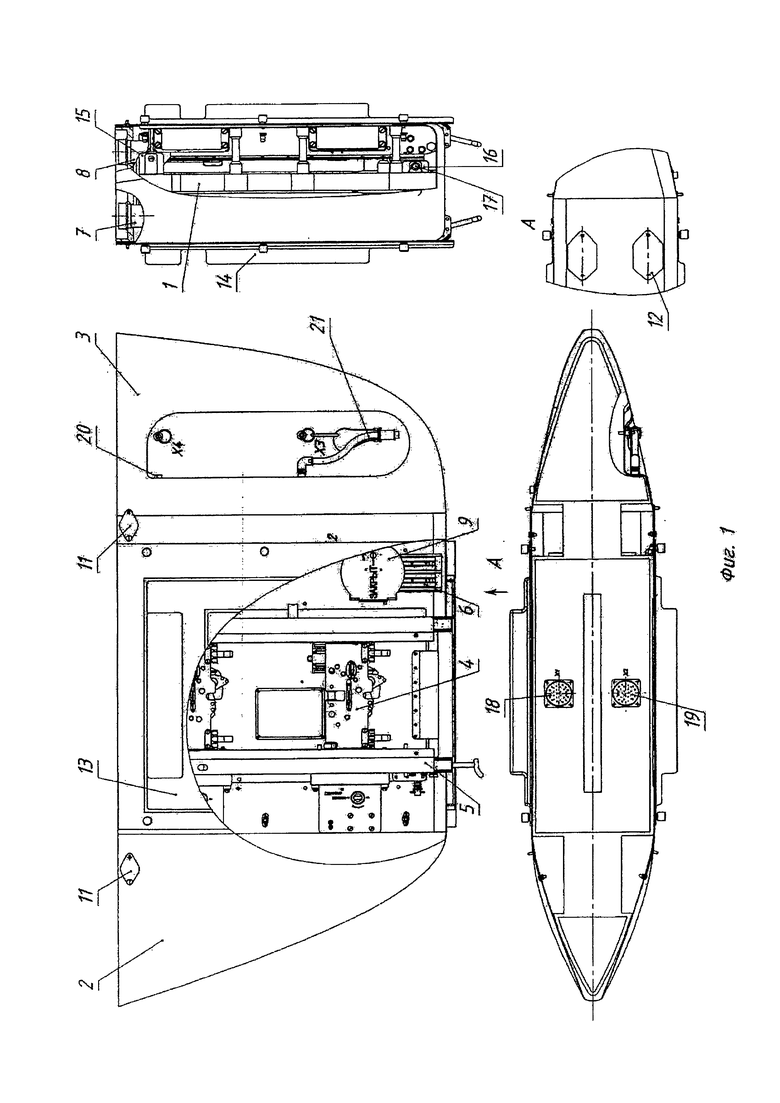
На фиг. 1 - держатель балочный многозамковый универсальный вертолетный.
Положение основных элементов конструкции при не подвешенных грузах.
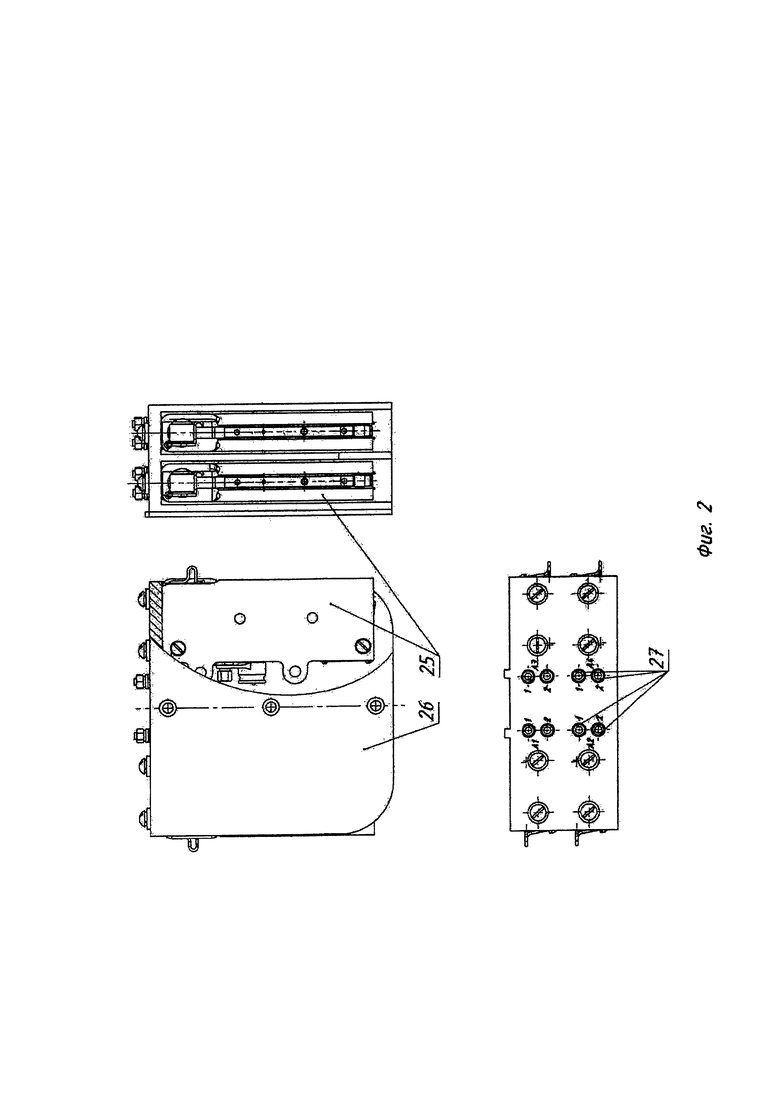
На фиг. 2 - блок механизмов МПИ 6. Элементы конструкции.
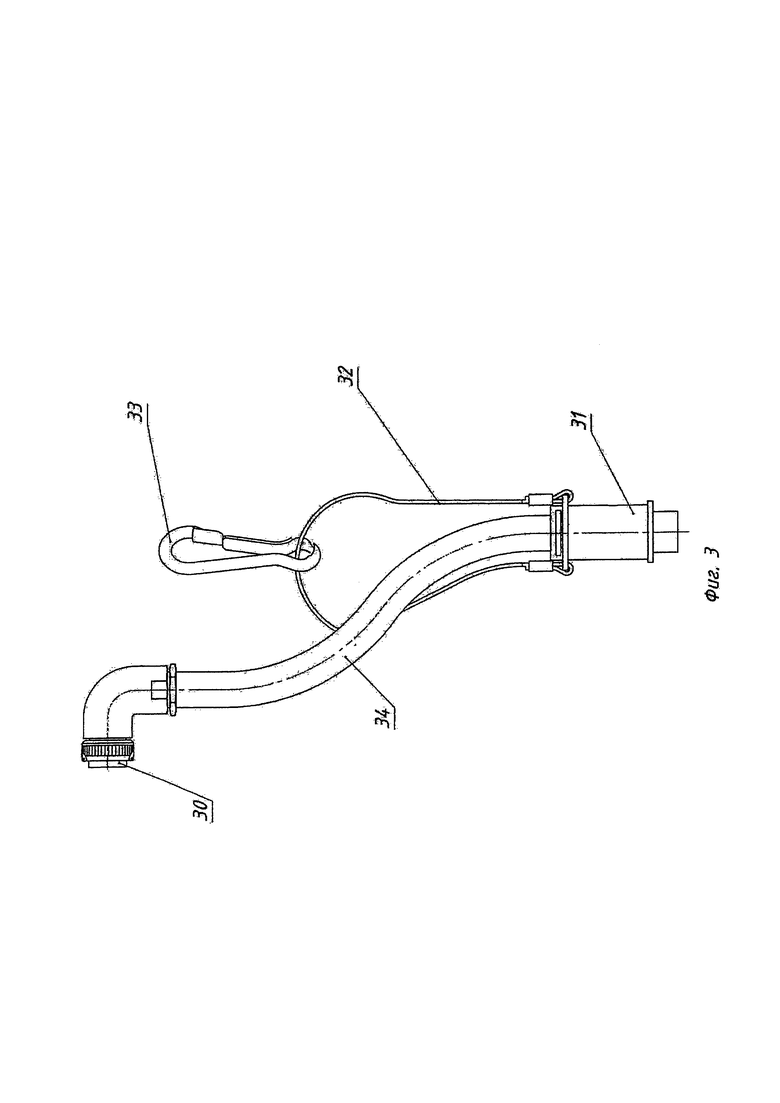
На фиг. 3 - жгут электрический съемный 21. Элементы конструкции.
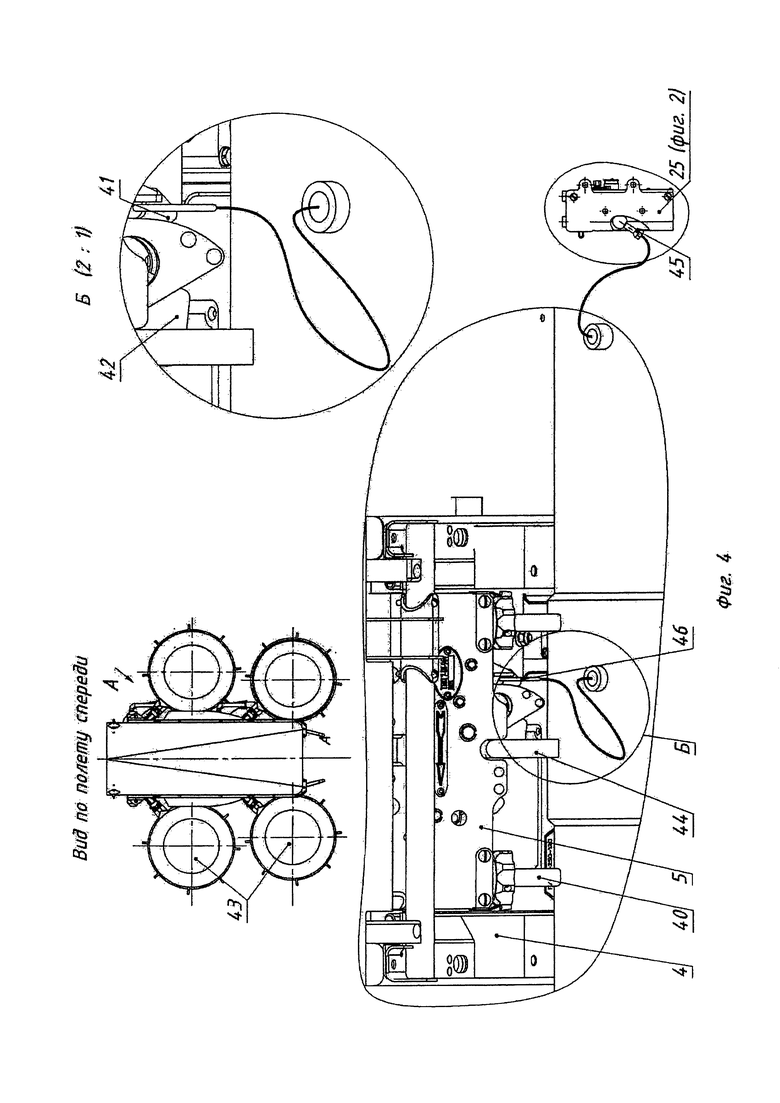
На фиг. 4 - положение основных элементов конструкции при подвеске груза №1 с использованием МПИ.
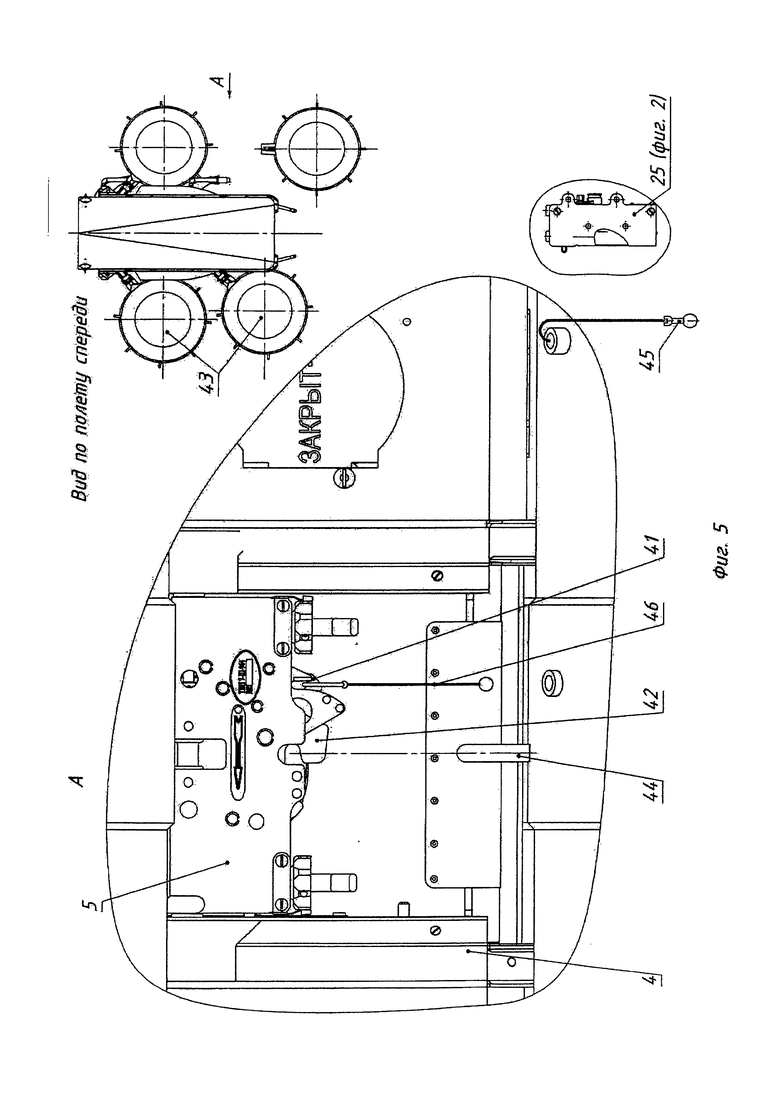
На фиг. 5 - положение основных элементов конструкции при сбросе груза №1 с использованием МПИ.
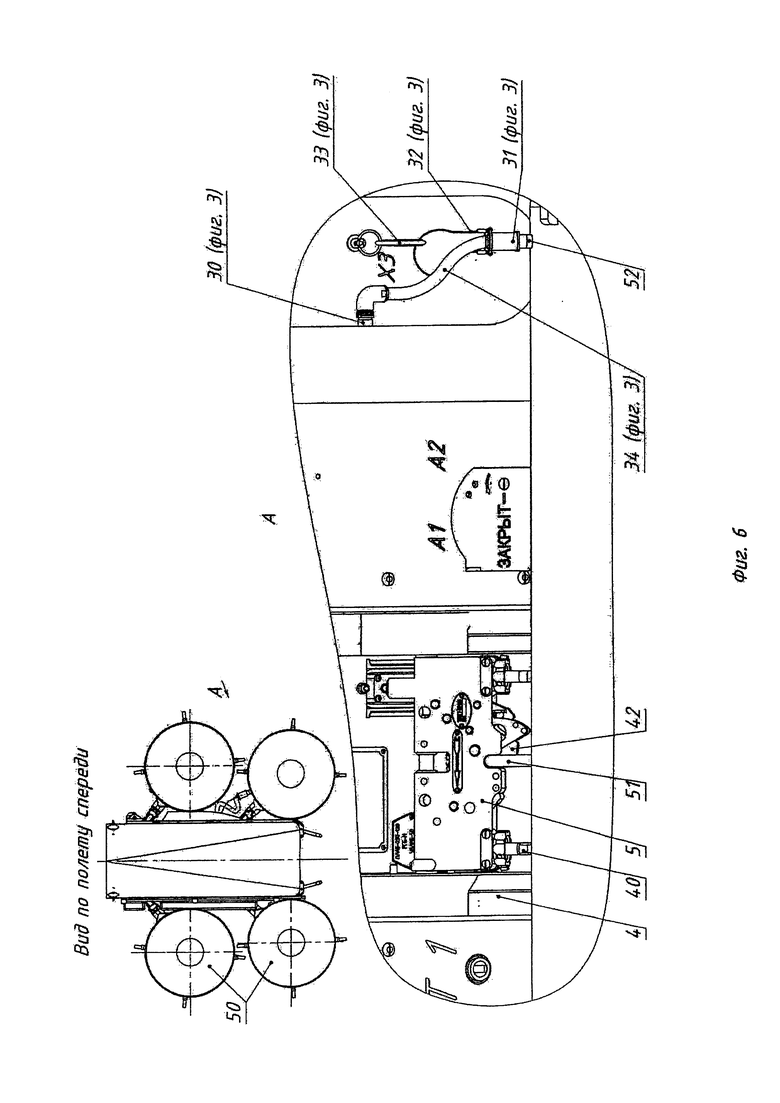
На фиг. 6 - положение основных элементов конструкции при подвеске груза №2 с использованием электрических жгутов съемных.
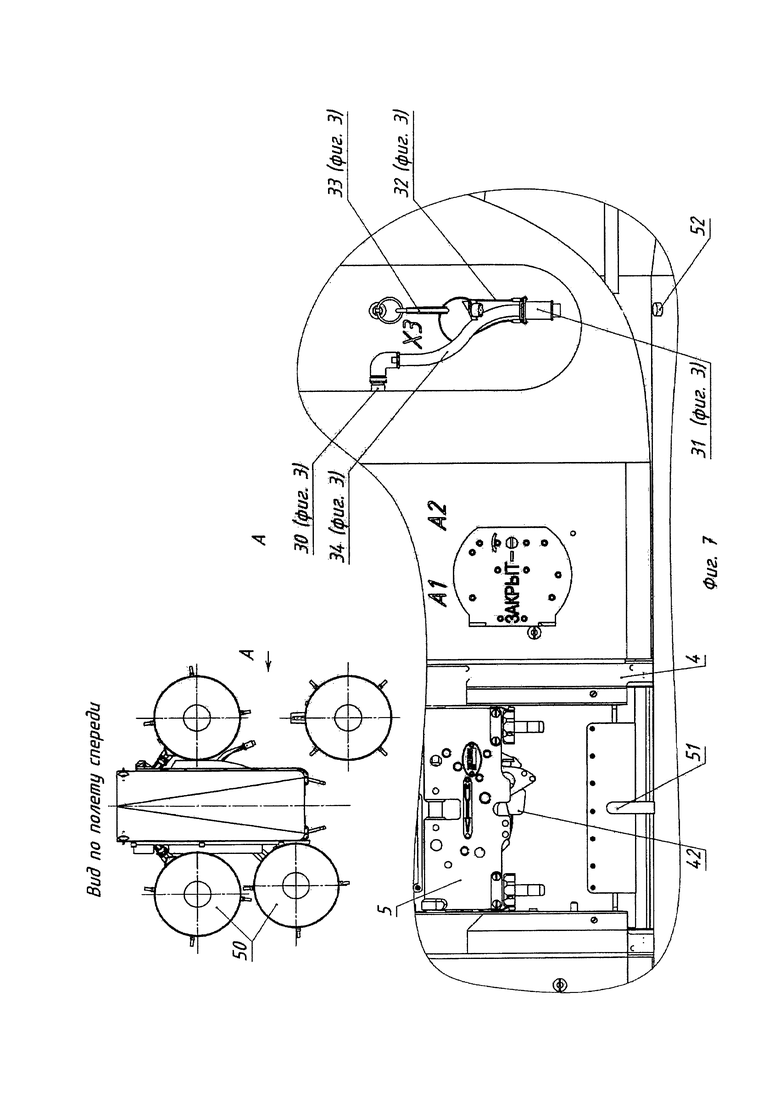
На фиг. 7 - положение основных элементов конструкции при сбросе груза №2 с использованием электрических жгутов съемных.
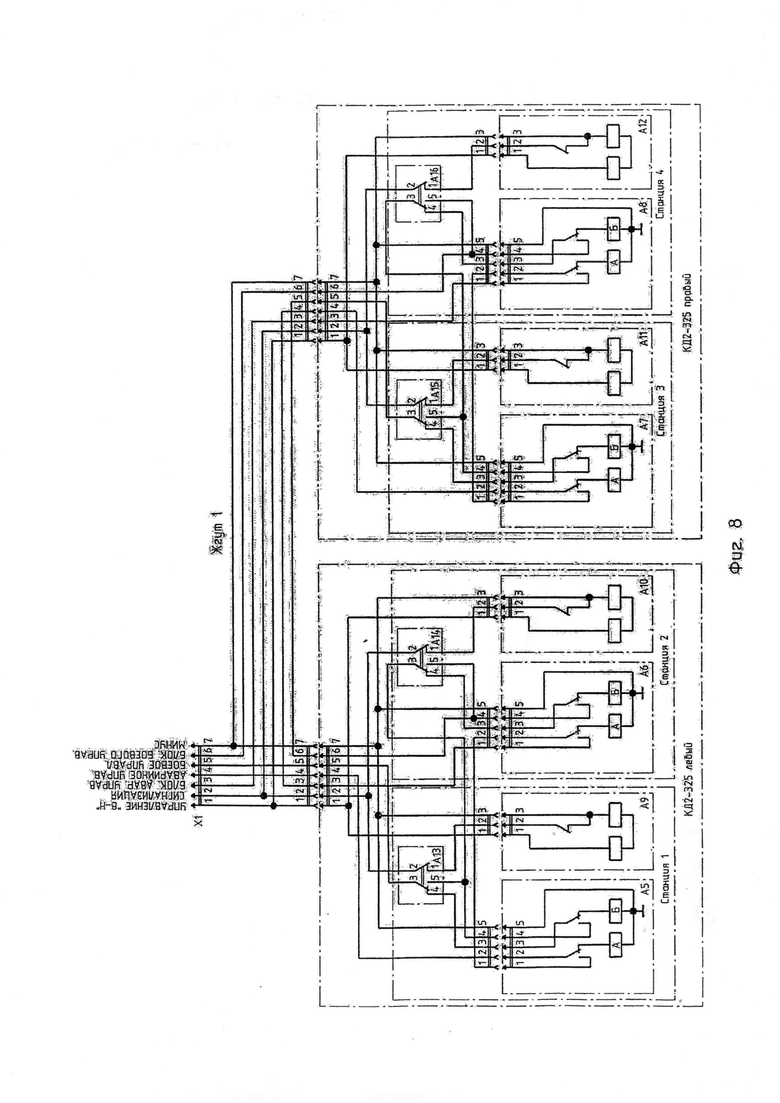
На фиг. 8 - схема электрическая принципиальная держателя балочного многозамкового (управление работой станций кассетных держателей от бортовой аппаратуры объекта).
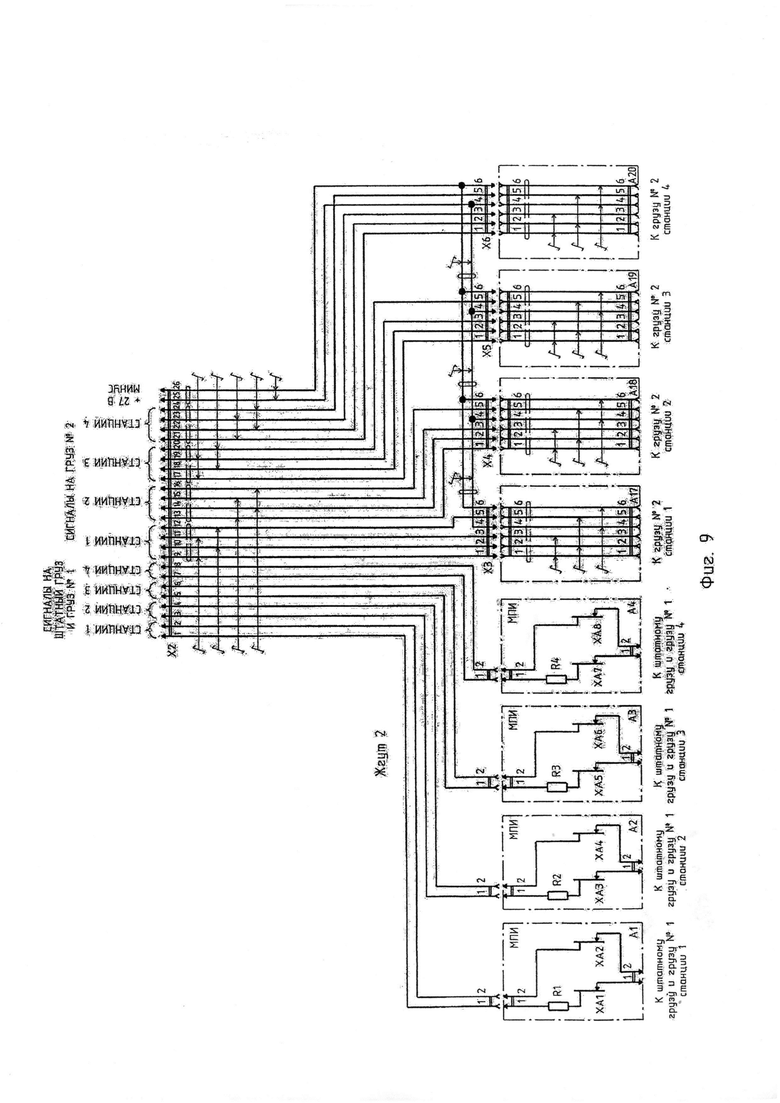
На фиг. 9 - схема электрическая принципиальная держателя балочного многозамкового (управление работой грузами от бортовой аппаратуры объекта).
Держатель балочный многозамковый универсальный вертолетный (фиг. 1) предназначен для установки на внешнюю подвеску вертолета на его выносные фермы (левую и правую).
Держатель обеспечивает подвеску расширенной номенклатуры изделий:
- грузов с механическими и электропиротехническими устройствами;
- управляемого авиационного вооружения.
Держатель имеет аэродинамическую форму и состоит конструктивно из:
- обтекателей переднего 2 и заднего 3;
- силового корпуса - рамы 1.
На раме 1 установлены:
- на кронштейнах верхних 15 и нижних 16 два кассетных держателя 4 (КД2-325 или его аналог). Держатели от перемещения зафиксированы шпильками 17. На направляющие держателей установлены накладки 14 (увеличение межцентрового расстояния между грузами верхней и нижней станции);
- блок механизмов МПИ 6. В состав блока МПИ (фиг. 2) входят четыре механизма МПИ-155 25, установленные в корпусе 26 (корпус изготовлен из диэлектрического материала, что обеспечивает возможность подачи на контакты 27 постоянного (27 В) или переменного напряжения (36 В, 400 Гц)).
На держателях 4 установлены четыре замка 5 (Дер2-47) для сброса грузов. Электрооборудование держателя подключается от бортовой аппаратуры объекта через:
- соединитель 18 электрического жгута №1 7 (управление работой станций кассетных держателей);
- соединитель 19 электрического жгута №2 8 (управление работой грузов).
На переднем обтекателе 2 (изготовленном из стеклопластика) имеются:
- отверстия для взвода приводов кассетных держателей;
- отверстия под установку болтов для крепления изделия к объекту, которое закрывается лиркой поворотной 11.
На заднем обтекателе 3 (изготовленном из стеклопластика) имеются:
- люк 9 для доступа к блоку МПИ 6;
- четыре кронштейна с кольцом 10 (для крепления съемных электрических жгутов);
- отверстия под установку болтов для крепления изделия к объекту, которое закрывается лиркой поворотной 11;
- прямоугольные отверстия под выходные каналы блока МПИ 6, которые закрываются поворотными лирками 12;
- четыре выходных соединителя 20 электрического жгута 8 (для стыковки с электрическими жгутами съемными 21);
- жгуты электрические съемные 21 (устанавливаются на держатель при работе с грузом №2).
Жгут электрический съемный 21 (фиг. 3) состоит из:
- соединителя 30 обеспечивающего установку жгута на держатель через соединитель 20 (фиг.1);
- соединителя 31 (отрывного) для стыковки с соединителем 52 груза 50 (фиг.6);
- электрического жгута 34 (в боуденовой защитной оболочке);
- карабина 33;
- предохранительного тросика 32.
Для закрытия элементов конструкции держателя (в стояночном режиме объекта) устанавливается кожух съемный 13.
Учитывая, что конструкция принцип работы изделий КД2-325, замка Дер2-47 при работе со штатной номенклатурой грузов подробно описаны в КД2-325.РЭ и Дер2-47.ТО в данной пояснительной записке описывается более подробно работа изделия с новыми типами грузов.
Подвеска грузов №1 и положение основных элементов конструкции держателя и груза изображены на фиг. 4.
Подвеска грузов осуществляется последовательно с верхних и нижних станций держателя. Технология (методика) подвески груза на одну из станций держателя (верхнюю) приводится ниже. Бугель 44 груза 43 закрывается в несущем рычаге 42 замка 5. Груз раскрепляется от боковых перемещений ухватами 40 замка 5. Замок с грузом поднимается по направляющим кассетного держателя 4 и закрывается в защелках его верхней станции. Кольцо 46 ПВУ (проволочное взрывное устройство далее ПВУ) устанавливается в зев рычага 41 замка 5. Вилка ЭПУ груза 43 устанавливается в канал МПИ-155 25 (фиг. 2) блока механизмов МПИ 6 (фиг. 1) верхней станции держателя. После установки жгута производится подвеска грузов на три другие станции держателя.
Сброс грузов №1 производится последовательно со станции 1-2-3-4. Положение элементов конструкции держателя и груза приводится на примере сброса груза с его первой нижней станции (фиг. 5).
При подаче команды на боевой сброс бугель 44 груза 43 выходит из зацепления с несущим рычагом 42 замка 5. Груз отделяется от замка. Кольцо 46 ПВУ остается в зеве рычага 41 замка 5. ПВУ выдергивает предохранительную чеку с падающего груза и переводит его в боевой режим, одновременно с подачей команды на сброс груза синхронно с бортовой аппаратуры объекта, по определенно заданной программе, происходит подача постоянного (-27 В) или переменного питающего напряжения (-36 В 400 Гц) на механизм МПИ-155 25 (фиг. 2) блока механизмов МПИ 6 (фиг. 1) нижней станции держателя, вилка ЭПУ 45 выходит из зацепления с контактными пластинами МПИ и передает задающую команду с бортовой аппаратуры объекта на аппаратуру груза. По аналогичной схеме происходит последовательный сброс грузов со 2; 3; 4 станций держателя.
Подвеска грузов №2 и положение основных элементов конструкции держателя грузов изображены на фиг.6.
Подвеска грузов осуществляется последовательно с верхних и нижних станций держателя. Технология (методика) подвески груза на одну из станций держателя (верхнюю) приводится ниже. Бугель 51 груза 50 закрывается в несущем рычаге 42 замка 5. Груз раскрепляется от боковых перемещений ухватами 40 замка 5. Замок с грузом поднимается по направляющим кассетного держателя 4 и закрывается в защелках его верхней станции.
Установить жгут съемный 21 на конструкциях «держатель-груз»:
- соединитель 30 состыковать на держателе через соединитель 20 (фиг. 1);
- соединитель 31 (отрывной) состыковать с соединителем 52 груза 50;
- карабин 33 с предохранительным тросиком 32 соединить с кольцом 10 (фиг. 1) кронштейна установленном на держателе.
После установки жгута съемного 21 на держатель жгут 34 и предохранительный тросик 32 имеют слабину для обеспечения гарантированного контакта электрической цепи между соединителями 31 и 52 (электрическая цепь «держатель-груз»).
После установки груза на верхнюю станцию держателя производится подвеска грузов на три другие его станции.
Сброс грузов №2 производится последовательно со станции 1-2-3-4. Положение элементов конструкции держателя и груза приводится на примере сброса груза с его первой нижней станции (фиг. 7).
При подаче команды на боевой сброс бугель 51 груза 50 выходит из зацепления с несущим рычагом 42 замка 5. Груз отделяется от замка. При этом трос зацепленный через карабин в кольце кронштейна натягивается и происходит безопасная расстыковка соединителей 31 и 52. Происходит разрыв электрической цепи между бортовой аппаратурой объекта - грузом.
Управление работой держателя производится от бортовой аппаратуры объекта (через вертолетные электрожгуты) по двум каналам управления.
На фиг. 8, 9 приводится схема электрическая принципиальная держателя балочного многозамкового.
По первому каналу происходит управление работой станций кассетных держателей от бортовой аппаратуры объекта (фиг. 8).
Электросхема обеспечивает:
- одиночный и аварийный сброс четырех грузов установленных на держателе.
- сброс грузов производится последовательно со станций 1-2-3-4 подачей управляющих команд с бортовой аппаратуры объекта по цепям управления «В-Н» (взрыв-невзрыв) и по цепям «боевого» или «аварийного» управления.
- обеспечивает сигнализацию наличия груза
Управление работой станций держателя осуществляется через соединитель X1 электрического жгута №1.
Подробное описание работы кассетного держателя и замка изложены в КД2-325РЭ и Дер2-47ТО.
По второму каналу происходит управление работой грузами от бортовой аппаратуры объекта.
Электросхема обеспечивает применение на держателе балочном грузов имеющих в своей комплектации ЭПУ и входные электрические соединители для подключения бортовой аппаратуры груза. Управление ЭПУ грузов осуществляется по цепям МПИ 1-2-3-4 станций держателя.
При сбросе:
- грузов допущенных для применения, на МПИ подается постоянное напряжение 27 В.
- грузов №1 на МПИ подается постоянное напряжение 27 В или переменное напряжение 36 В, 400 Гц, в зависимости от программы заданной с бортовой аппаратуры объекта в полете.
Управление грузами, имеющим в своем составе электрические соединители, осуществляется через транзитные жгуты по цепям груза №2 1-2-3-4 станций держателя.
Сигналы, передаваемые по транзитным жгутам, программируются с бортовой аппаратуры объекта в полете.
Управление работой груза №2 осуществляется через соединитель Х2 электрического жгута №2.
В качестве примера приводится описание работы электросхемы держателя балочного при боевом сбросе груза №1 и №2 с первой (нижней) станции.
Сброс груза №1 (фиг. 5).
При подаче питающего напряжения на цепи: X1-1 (управления «В-Н»), X1-5 («боевое» управления), X1-7 («минус») происходит срабатывание замка и сброс груза. Кольцо 46 ПВУ остается в зеве рычага 41 замка 5. ПВУ выдергивает предохранительную чеку с падающего груза и переводит его в боевой режим. Одновременно с этим через разъем Х2-1, Х2-2 первой станции по определенно заданной программе происходит подача постоянного (-27 В) или переменного питающего напряжения (-36 В 400 Гц) с бортовой аппаратуры объекта на груз.
Примечание - при срабатывании электропривода замка первой станции происходит переключение его контактной группы для подготовки цепи для сброса груза со второй станции (верхней).
Сброс груза №2 (фиг. 6).
При подвешенном грузе на первую станцию держателя по цепям Х2-9, Х2-10, Х2-11, Х2-12, Х2-25, Х2-26 на аппаратуру груза поступает программируемый сигнал с бортовой аппаратуры объекта через транзитный жгут первой станции.
При подаче питающего напряжения на цепи: X1-5 («боевого» управления) X1-7 («минус») происходит срабатывание замка и сброс груза.
Груз отделяется от замка. При этом трос, зацепленный через карабин в кольце кронштейна, натягивается и происходит безопасная расстыковка соединителей 30 и 52. Происходит разрыв электрической цепи транзитного жгута №2 первой станции между бортовой аппаратурой объекта - грузом.
Примечание - при срабатывании электропривода замка первой станции происходит переключение его контактной группы для подготовки цепи для сброса груза со второй станции (верхней).
| название | год | авторы | номер документа |
|---|---|---|---|
| Балочный держатель вертолетный многофункциональный | 2021 |
|
RU2773780C1 |
| БАЛОЧНЫЙ ДЕРЖАТЕЛЬ | 2011 |
|
RU2479467C2 |
| Ухват разводной регулируемый | 2019 |
|
RU2713431C1 |
| Держатель балочный многофункциональный | 2018 |
|
RU2680228C1 |
| МНОГОЗАМКОВЫЙ БАЛОЧНЫЙ ДЕРЖАТЕЛЬ | 2010 |
|
RU2441811C1 |
| УЧЕБНАЯ АВИАЦИОННАЯ БОМБА С СИСТЕМОЙ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ | 2006 |
|
RU2319102C1 |
| БАЛОЧНЫЙ ДЕРЖАТЕЛЬ | 2010 |
|
RU2444465C1 |
| СПОСОБ ПОДВЕСКИ ВЫНЕСЕННЫХ АГРЕГАТОВ ИЛИ ВНЕШНИХ ОБЪЕКТОВ НА ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2003 |
|
RU2251517C1 |
| УСТРОЙСТВО ПОДВЕСКИ ВЫНЕСЕННЫХ АГРЕГАТОВ ИЛИ ВНЕШНИХ ОБЪЕКТОВ НА ЛЕТАТЕЛЬНОМ АППАРАТЕ | 2003 |
|
RU2251518C1 |
| ПУСКОВАЯ УСТАНОВКА ДЛЯ АВИАЦИОННЫХ РАКЕТ | 2013 |
|
RU2539434C1 |
Изобретение относится к области авиации, в частности к конструкциям балочных держателей, используемых для подвески, транспортировки и сброса грузов. Держатель балочный многозамковый универсальный вертолетный содержит корпус в виде балки таврового сечения, два кассетных держателя, четыре замка для подвески грузов, обтекатели передний и задний, электрические жгуты, обеспечивающие электрическую связь бортовой аппаратуры объекта с изделием и подвешенными грузами. Держатель также содержит блок механизмов подачи импульса (МПИ) для подключения электропиротехнических устройств (ЭПУ) грузов. Обеспечивается возможность подвески управляемых видов авиационного вооружения. 9 ил.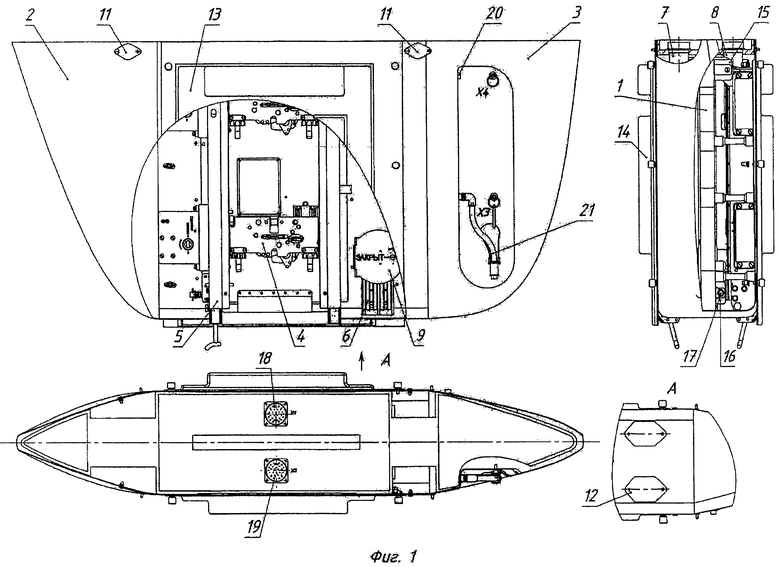
Держатель балочный многозамковый универсальный вертолетный, используемый для подвески, транспортировки и сброса грузов, в состав которого входят силовой корпус, выполненный в виде балки таврового сечения, два кассетных держателя, четыре замка для подвески грузов, обтекатели передний и задний, электрожгут для электрического соединения объекта с изделием, отличающийся тем, что содержит в конструкции дополнительно блок механизмов подачи импульса (МПИ), обеспечивающий применение расширенной номенклатуры допущенных для применения грузов с электропиротехническими устройствами (ЭПУ), подвеску управляемых видов авиационного вооружения и дополнительные электрические жгуты, обеспечивающие электрическую связь бортовой аппаратуры объекта с изделием и подвешенными грузами управляемого авиационного вооружения.
| Держатель балочный многофункциональный | 2018 |
|
RU2680228C1 |
| Адаптивный способ и устройство принудительного сброса - катапультирования груза | 2017 |
|
RU2692287C2 |
| БАЛОЧНЫЙ ДЕРЖАТЕЛЬ | 2012 |
|
RU2521446C1 |
| CN 106585991 B, 03.05.2019 | |||
| ФОРМИРОВАТЕЛЬ ИМПУЛЬСОВ ИЗ СИГНАЛОВ ИНДУКЦИОННЫХ ДАТЧИКОВ ЧАСТОТЫ ВРАЩЕНИЯ | 2011 |
|
RU2458459C1 |

