Изобретение относится к области цифровой обработки радиолокационной информации и может быть использовано в любой области техники, в том числе для экстраполяции координат интенсивно маневрирующих объектов и оценки параметров их траекторий.
Известен экстраполятор [AC, SU 415672, кл. G06G 7/30), 15.02.74], используемый для экстраполяции или предсказания процессов, которые имеют конечную производную на интервале наблюдения, или аппроксимируются с заданной точностью многочленом, имеющим конечную производную, равную нулю. Положенное в основу экстраполятора полиномиальное представление экстраполируемого процесса, не соответствует действительному характеру его изменения.
Наиболее близким к предлагаемому по технической сущности и достигаемому результату является адаптивный экстраполятор [Патент RU 2601143, С1; МПК G06G 7/30 (2006.01), 27.10.2016], содержащий последовательно соединенные первое запоминающее устройство, вход которого является входом экстраполятора, первый блок вычитания, вычитающий вход которого соединен с выходом запоминающего устройства, а суммирующий вход - с входом экстраполятора, сумматор, первый вход которого соединен с выходом первого блока вычитания, второй - с входом экстраполятора, а выход является выходом экстраполятора, второй вход экстраполятора соединен со вторым входом второго запоминающего устройства, первый вход которого соединен с выходом экстраполятора, выход второго запоминающего устройства соединен с вычитающим входом второго блока вычитания, вторым входом первого запоминающего устройства, суммирующим входом первого блока вычитания, входом первого блока выделения модуля, а также вторым входом сумматора, суммирующий вход второго вычитающего устройства соединен с четвертым входом экстраполятора, выход второго блока вычитания соединен с первым входом третьего блока умножения, второй вход которого соединен с выходом третьего запоминающего устройства, вход которого соединен с пятым входом экстраполятора, выход третьего блока умножения соединен с четвертым входом сумматора, третий вход которого соединен с выходом второго блока умножения, второй вход которого соединен с выходом второго запоминающего устройства, вход которого соединен с третьим входом экстраполятора, первый вход второго блока умножения соединен с выходом блока отношения, первый вход которого соединен с выходом первого блока выделения модуля, вход второго блока выделения модуля и первый вход первого блока умножения соединены с выходом первого блока вычитания, выход второго блока выделения модуля соединен с первым входом первого блока умножения, выход которого соединен со вторым входом блока отношения.
Недостатком прототипа является невысокая точность экстраполяции координат, обусловленная наличием динамических ошибок, возникающих из-за рассогласования экстраполированного и действительного положения маневрирующего объекта. Такие ошибки формирования оценок координат, возникающие в процедурах вторичной обработки радиолокационной информации из-за интенсивных маневров, могут привести в конечном итоге к срыву сопровождения. Вследствие этого возникает необходимость повторного выполнения достаточно длительной процедуры поиска и захвата цели, а при сопровождении интенсивно маневрирующих объектов даже небольшая потеря времени может привести к непоправимым последствиям [Канащенков А.И., Меркулов В.И., Самарин О.Ф. Облик перспективных бортовых радиолокационных систем. Возможности и ограничения. М: ИПРЖР, 2002, с. 24-25].
Техническим результатом является повышение точности экстраполяции координат и оценки параметров траекторий интенсивно маневрирующих объектов, за счет минимизации динамических ошибок экстраполяции путем коррекции их спрогнозированных значений.
Указанный технический результат достигается тем, что в адаптивном экстраполяторе, содержащем последовательно соединенные первое запоминающее устройство, вход которого является входом экстраполятора, первый блок вычитания, вычитающий вход которого соединен с выходом запоминающего устройства, а суммирующий вход - с входом экстраполятора, сумматор, первый вход которого соединен с выходом первого блока вычитания, второй - с входом экстраполятора, второй вход экстраполятора соединен со вторым входом второго запоминающего устройства, первый вход которого соединен с выходом первого сумматора, выход второго запоминающего устройства соединен с вычитающим входом второго блока вычитания, вторым входом первого запоминающего устройства, суммирующим входом первого блока вычитания, входом первого блока выделения модуля, а также вторым входом сумматора, суммирующий вход второго блока вычитания соединен с четвертым входом экстраполятора, выход второго блока вычитания соединен с первым входом третьего блока умножения, второй вход которого соединен с выходом третьего запоминающего устройства, вход которого соединен с пятым входом экстраполятора, выход третьего блока умножения соединен с четвертым входом сумматора, третий вход которого соединен с выходом второго блока умножения, второй вход которого соединен с выходом второго запоминающего устройства, вход которого соединен с третьим входом экстраполятора, первый вход второго блока умножения соединен с выходом блока отношения, первый вход которого соединен с выходом первого блока выделения модуля, вход второго блока выделения модуля и первый вход первого блока умножения соединены с выходом первого блока вычитания, выход второго блока выделения модуля соединен с первым входом первого блока умножения, выход которого соединен со вторым входом блока отношения, согласно изобретению дополнительно содержит последовательно соединенные третий блок вычитания, четвертый блок умножения, второй блок отношения, пятый блок умножения, второй вход которого соединен с выходом третьего запоминающего устройства и третий сумматор, последовательно соединенные блок задержки, четвертый блок вычитания, суммирующий вход которого объединен с суммирующим входом второго блока вычитания и соединен с четвертым входом экстраполятора, шестой блок умножения, второй вход которого соединен с выходом четвертого запоминающего устройства, и третий сумматор, третий вход которого объединен с третьим входом первого сумматора и соединен с выходом второго блока умножения, четвертый вход объединен с четвертым входом первого сумматора и соединен с выходом третьего блока умножения, выход третьего сумматора является выходом устройства, последовательно соединенные второй сумматор, первый вход которого объединен с первым входом первого сумматора, первым входом первого блока умножения, входом второго блока выделения модуля и соединен с выходом первого блока вычитания, второй вход второго сумматора объединен с вычитающим входом третьего блока вычитания, вторым входом первого сумматора, суммирующим входом первого блока вычитания, вторым входом первого запоминающего устройства, вычитающим входом второго блока вычитания и соединен с выходом второго запоминающего устройства, и третий сумматор, последовательно соединенные третий блок выделения модуля, вход которого объединен с первым входом четвертого блока умножения и соединен с выходом третьего блока вычитания, и четвертый блок умножения, а также последовательно соединенные четвертый блок выделения модуля, вход которого объединен с входом блока задержки, суммирующим входом третьего блока вычитания, первым входом второго запоминающего устройства, и соединен с выходом первого сумматора и второй блок отношения.
Сущность изобретения заключается в том, что дополнительно введенные последовательно соединенные третий блок вычитания, четвертый блок умножения второй блок отношения, пятый блок умножения, второй вход которого соединен с выходом третьего запоминающего устройства и третий сумматор, последовательно соединенные блок задержки, четвертый блок вычитания, суммирующий вход которого объединен с суммирующим входом второго блока вычитания и соединен с четвертым входом экстраполятора, и шестой блок умножения, второй вход которого соединен с выходом четвертого запоминающего устройства, и третий сумматор, третий вход которого объединен с третьим входом первого сумматора и соединен с выходом второго блока умножения, четвертый вход объединен с четвертым входом первого сумматора и соединен с выходом третьего блока умножения, а выход третьего сумматора является выходом устройства, последовательно соединенные второй сумматор, первый вход которого объединен с первым входом первого сумматора, первым входом первого блока умножения, входом второго блока выделения модуля и соединен с выходом первого блока вычитания, второй вход второго сумматора объединен с вычитающим входом третьего блока вычитания, вторым входом первого сумматора, суммирующим входом первого блока вычитания, вторым входом первого запоминающего устройства, вычитающим входом второго блока вычитания и соединен с выходом второго запоминающего устройства, и третий сумматор, последовательно соединенные третий блок выделения модуля, вход которого объединен с первым входом четвертого блока умножения и соединен с выходом третьего блока вычитания, и четвертый блок умножения, а также последовательно соединенные четвертый блок выделения модуля, вход которого объединен с входом блока задержки, суммирующим входом третьего блока вычитания, первым входом второго запоминающего устройства, и соединен с выходом первого сумматора и второй блок отношения используют при расчетах текущее и экстраполируемое (прогнозируемое) значение оценки координаты объекта, сформированное в первом сумматоре, для коррекции результата измерения.
Структурная схема адаптивного экстраполятора с коррекцией прогноза приведена на фигуре, где обозначено: 1 - запоминающие устройства, 2 - вычитающие устройства, 3 - сумматоры, 4 - блоки выделения модуля, 5 - блоки отношения, 6 - блоки умножения и 7 - блок задержки. Адаптивный экстраполятор также имеет четыре входа и выход. Назначение элементов схемы ясно из их названия. Все устройства могут быть выполнены с использованием выпускаемых промышленностью радиотехнических элементов.
Адаптивный экстраполятор с коррекцией прогноза работает аналогично прототипу. Отличие заключается в следующем. Для коррекции прогноза полученное экстраполируемое значение (значение прогноза) х(k+1), где k - момент времени, с выхода первого сумматора 3.1 подается на суммирующий вход третьего блока вычитания 2.3, вход четвертого блока выделения модуля 4.4 и на блок задержки 7. С выхода третьего блока вычитания 2.3, на вычитающий вход которого поступает текущее значение х(k) координаты объекта, где k - момент времени, значение разности поступает на первый вход четвертого блока умножения 6.4 и на вход третьего блока выделения модуля 4.3, с выхода которого полученное значение поступает на второй вход четвертого блока умножения 6.4. С выхода четвертого блока умножения 6.4 значение поступает на второй вход второго блока отношения 5.2, на первый вход которого поступает модуль экстраполируемого значения с четвертого блока выделения модуля 4.4. На выходе второго блока отношения 5.2 формируется значение величины, характеризующей инерционные свойства объекта движения, которое поступает на первый вход пятого блока умножения 6.5, где умножается на значение коэффициента J1, поступившее с выхода третьего запоминающего устройства 1.3. Полученное произведение поступает на второй вход третьего сумматора 3.3. При поступлении на суммирующий вход четвертого блока вычитания 2.4 следующего результата наблюдения координаты, на его вычитающий вход с выхода блока задержки 7 поступает значение прогноза, где вычисляется ошибка между измеренным и экстраполированным значением (невязка). С выхода четвертого блока вычитания 2.4 полученное значение поступает на первый вход шестого блока умножения 6.6, где умножается на значение коэффициента J2, поступившее с выхода четвертого запоминающего устройства 1.4 и полученное произведение поступает на первый вход третьего сумматора 3.3. Одновременно с этим на третий и четвертый вход третьего сумматора 3.3 поступают значение со второго блока умножения 6.2 и третьего блока умножения 6.3 соответственно, а на пятый вход поступает значение с выхода второго сумматора 3.2, на первый вход которого поступает значение с первого блока вычитания 2.1, а на второй текущее значение х(k) координаты объекта, где k - момент времени, со второго запоминающего устройства. При этом на выходе третьего сумматора формируется скорректированное экстраполируемое значение хk(k+1), где k - момент времени, которое и поступает на выход адаптивного экстраполятора с коррекцией прогноза.
Снижение динамической ошибки экстраполяции координат интенсивно маневрирующего объекта достигается за счет использования при расчетах полученного значения прогноза х(k+1), где k - момент времени, и оптимального выбора соотношения между рассчитанными величинами значений невязок и величинами, характеризующими инерционные свойства маневрирующего объекта, с применением коэффициентов J1 и J2. Возможность корректировки оценки координат и параметров траектории маневрирующего объекта повышает точность его сопровождения, а также придает полученному экстраполятору свойство динамического фильтра [Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. М.: Радио и связь, 1993, с. 27-28].
Таким образом, получен вариант реализации адаптивного экстраполятора координат маневрирующего объекта с коррекцией прогноза, структура которого определяется с учетом априорных, текущих и спрогнозированных данных о сопровождаемой траектории. Использование предлагаемого технического решения, позволяет повысить точность оценки координат интенсивно маневрирующего объекта за счет снижения динамических ошибок экстраполяции.
Предлагаемое техническое решение практически применимо, так как для его реализации могут быть использованы типовые радиоэлектронные узлы и устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ ЭКСТРАПОЛЯТОР | 2015 |
|
RU2601143C1 |
| Экстраполятор с адаптацией по целевому функционалу | 2021 |
|
RU2780197C1 |
| Квазилинейный адаптивный экстраполятор | 2017 |
|
RU2675906C1 |
| Цифровой экстраполятор | 1983 |
|
SU1126970A1 |
| Экстраполятор видеосигнала изображения | 1989 |
|
SU1718246A1 |
| Экстраполятор видеосигнала изображения | 1983 |
|
SU1091189A1 |
| Экстраполятор | 1987 |
|
SU1439620A1 |
| Линейный экстраполятор | 1981 |
|
SU1024943A1 |
| Экстраполятор | 1978 |
|
SU1005092A1 |
| Многоскоростной цифровой экстраполятор | 2018 |
|
RU2684190C1 |

Изобретение относится к области цифровой обработки радиолокационной информации и может быть использовано для экстраполяции координат. Техническим результатом является повышение точности экстраполяции координат и оценки параметров траекторий интенсивно маневрирующих объектов, за счет снижения динамических ошибок экстраполяции путем коррекции их прогнозируемых значений. Устройство содержит четыре запоминающих устройства, четыре вычитающих устройства, три сумматора, четыре блока выделения модуля, два блока отношения, шесть блоков умножения и блок задержки. 1 ил.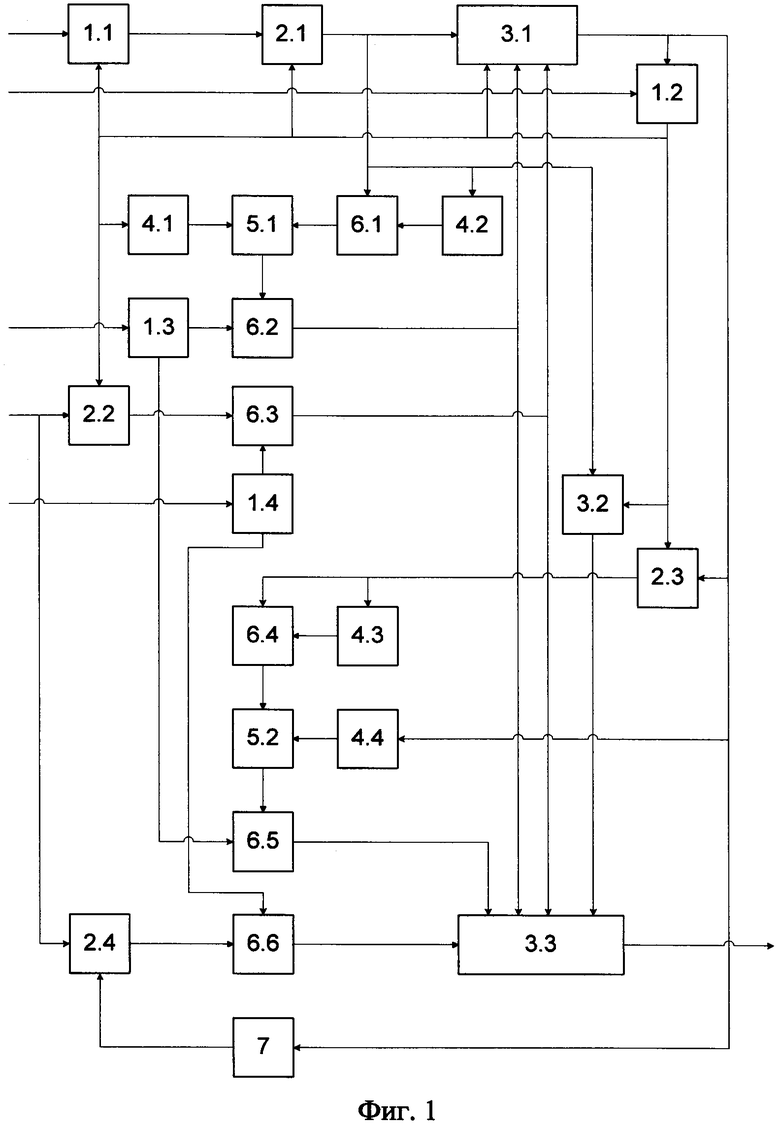
Адаптивный экстраполятор с коррекцией прогноза, содержащий последовательно соединенные первое запоминающее устройство, вход которого является входом экстраполятора, первый блок вычитания, вычитающий вход которого соединен с выходом запоминающего устройства, а суммирующий вход - с входом экстраполятора, сумматор, первый вход которого соединен с выходом первого блока вычитания, второй - с входом экстраполятора, второй вход экстраполятора соединен со вторым входом второго запоминающего устройства, первый вход которого соединен с выходом первого сумматора, выход второго запоминающего устройства соединен с вычитающим входом второго блока вычитания, вторым входом первого запоминающего устройства, суммирующим входом первого блока вычитания, входом первого блока выделения модуля, а также вторым входом сумматора, суммирующий вход второго блока вычитания соединен с четвертым входом экстраполятора, выход второго блока вычитания соединен с первым входом третьего блока умножения, второй вход которого соединен с выходом третьего запоминающего устройства, вход которого соединен с пятым входом экстраполятора, выход третьего блока умножения соединен с четвертым входом сумматора, третий вход которого соединен с выходом второго блока умножения, второй вход которого соединен с выходом второго запоминающего устройства, вход которого соединен с третьим входом экстраполятора, первый вход второго блока умножения соединен с выходом блока отношения, первый вход которого соединен с выходом первого блока выделения модуля, вход второго блока выделения модуля и первый вход первого блока умножения соединены с выходом первого блока вычитания, выход второго блока выделения модуля соединен с первым входом первого блока умножения, выход которого соединен со вторым входом блока отношения, отличающийся тем, что дополнительно введены последовательно соединенные третий блок вычитания, четвертый блок умножения, второй блок отношения, пятый блок умножения, второй вход которого соединен с выходом третьего запоминающего устройства и третий сумматор, последовательно соединенные блок задержки, четвертый блок вычитания, суммирующий вход которого объединен с суммирующим входом второго блока вычитания и соединен с четвертым входом экстраполятора, шестой блок умножения, второй вход которого соединен с выходом четвертого запоминающего устройства, и третий сумматор, третий вход которого объединен с третьим входом первого сумматора и соединен с выходом второго блока умножения, четвертый вход объединен с четвертым входом первого сумматора и соединен с выходом третьего блока умножения, выход третьего сумматора является выходом устройства, последовательно соединенные второй сумматор, первый вход которого объединен с первым входом первого сумматора, первым входом первого блока умножения, входом второго блока выделения модуля и соединен с выходом первого блока вычитания, второй вход второго сумматора объединен с вычитающим входом третьего блока вычитания, вторым входом первого сумматора, суммирующим входом первого блока вычитания, вторым входом первого запоминающего устройства, вычитающим входом второго блока вычитания и соединен с выходом второго запоминающего устройства, и третий сумматор, последовательно соединенные третий блок выделения модуля, вход которого объединен с первым входом четвертого блока умножения и соединен с выходом третьего блока вычитания, и четвертый блок умножения, а также последовательно соединенные четвертый блок выделения модуля, вход которого объединен с входом блока задержки, суммирующим входом третьего блока вычитания, первым входом второго запоминающего устройства, и соединен с выходом первого сумматора и второй блок отношения.
| АДАПТИВНЫЙ ЭКСТРАПОЛЯТОР | 2015 |
|
RU2601143C1 |
| Многоскоростной цифровой экстраполятор | 2018 |
|
RU2684190C1 |
| Экстраполятор | 1981 |
|
SU1003108A1 |
| Адаптивный экстраполятор | 1982 |
|
SU1042031A1 |
| US 8452719 B2, 28.05.2013 | |||
| US 20080059547 A1, 06.03.2008. | |||

