Изобретение относится к области путевого хозяйства железнодорожных путей, в частности к выправке железнодорожного пути, и может быть использовано при планово-предупредительной выправке пути, постановке пути в проектное положение и отделке пути после производства капитальных путевых работ.
Известен способ выправки железнодорожного пути, заключающийся в том, что измеряют стрелы изгиба рельсовых нитей в плане, стрелы прогиба рельсовых нитей в продольном профиле и положение рельсовых нитей по уровню. Рассчитываются величины сдвижек и подъемок рельсовых нитей и циклично выправляют железнодорожный путь в соответствии с величинами сдвижек и подъемок рельсовых нитей («Машина выправочно-подбивочно-рихтовочная ВПР-02», техническое описание и инструкция по эксплуатации, М.: Транспорт, 1995 г., стр. 11-12; 81-92).
Известно также устройство для выправки железнодорожного пути, содержащее монтируемые на путевой машине подъемно-рихтовочное устройство, устройство управления подъемно-рихтовочным устройством и контрольно-измерительное устройство. Контрольно-измерительное устройство включает в себя датчик пройденного пути, по меньшей мере, три измерительные тележки, тросы, натянутые между соответствующими измерительными тележками, и установленные на соответствующих измерительных тележках и соединенные с устройством управления подъемно-рихтовочным устройством датчики стрел прогиба рельсовых нитей в продольном профиле, датчики уровня и датчики стрел изгиба рельсовых нитей в плане («Машина выправочно-подбивочно-рихтовочная ВПР-02», техническое описание и инструкция по эксплуатации, М.: Транспорт, 1995 г., стр. 9-12; 76-78; 81-92).
Известные способ и устройство не обеспечивают качественную выправку железнодорожного пути, поскольку устройство для выправки железнодорожного пути не предусматривает измерение положения выправленного пути в процессе работы машины относительно внешней системы координат или опорной плоскости для пространственной привязки оси пути, что не обеспечивает постановку пути в проектное положение, например, при капитальном ремонте, реконструкции или новом строительстве, функции сглаживания в данном случае недостаточно.
Известен способ выправки железнодорожного пути (см. патент РФ №2230848, МПК Е01В 31/08, Е01В 35/06, опубл. 20.06.2004, Бюл. №17), заключающийся в том, что измеряют стрелы изгиба рельсовых нитей в плане, стрелы прогиба рельсовых нитей в продольном профиле и положение рельсовых нитей по уровню, рассчитывают величины сдвижек и подъемок рельсовых нитей и циклично выправляют железнодорожный путь в соответствии с величинами сдвижек и подъемок рельсовых нитей, причем перед каждым циклом выправки пути измеряют стрелы изгиба рельсовых нитей в плане, стрелы прогиба рельсовых нитей в продольном профиле и положение рельсовых нитей по уровню в зоне выправки пути и на выправленном пути, корректируют расчетные величины сдвижки и подъемки рельсовых нитей с учетом этих измерений и затем выправляют железнодорожный путь в соответствии с этими скорректированными величинами, при этом после завершения каждого цикла выправки пути измеряют стрелу изгиба рельсовых нитей в плане, стрелу прогиба рельсовых нитей в продольном профиле и положение рельсовых нитей по уровню в зоне выправки пути и на выправленном пути и измеряют микроуклон пути в зоне выправленного пути, затем при необходимости повторно осуществляют выправку пути в данном цикле его выправки или учитывают эти стрелы, положение рельсовых нитей по уровню и микроуклон пути при следующем цикле выправки пути.
Известное устройство для выправки железнодорожного пути (см. патент РФ №2230848, МПК Е01В 31/08, Е01В 35/06, опубл. 20.06.2004, Бюл. №17), содержит монтируемые на путевой машине подъемно-рихтовочное устройство, устройство управления подъемно-рихтовочным устройством и контрольно-измерительное устройство, включающее в себя датчик пройденного пути, по меньшей мере, три измерительные тележки, тросы, натянутые между соответствующими измерительными тележками, и установленные на соответствующих измерительных тележках и соединенные с устройством управления подъемно-рихтовочным устройством датчики стрел прогиба рельсовых нитей в продольном профиле, датчики уровня и датчики стрел изгиба рельсовых нитей в плане, датчик уклона, размещаемый в зоне выправленного пути и имеющим возможность измерения микроуклонов пути в продольном профиле, при этом датчик уклона соединен с устройством управления подъемно-рихтовочным устройством, представляющим собой компьютер.
К недостаткам известных способа и устройства следует отнести то, что в данном техническом решении, как и в описанных выше аналогах, не обеспечивается возможность постановки железнодорожного пути в проектное положение по координатам с использованием цифрового проекта, что снижает точность выправки пути и увеличивает время проведения процесса выправки из-за проведения предварительных расчетов сдвижек для каждого прохода машины и формирования проекта по сдвижкам.
Техническая задача изобретения - расширение функциональных возможностей, повышение точности выправки пути и снижение времени проведения процесса выправки за счет отработки сдвижек и подъемок исполнительным механизмом (подъемно-рихтовочным устройством) по управляющим сигналам, сформированным по разности проектных и фактических координат оси пути по данным цифрового проекта.
Для решения данной задачи в способе выправки железнодорожного пути, заключающемся в том, что измеряют стрелы изгиба рельсовых нитей в плане и положение рельсовых нитей по уровню, рассчитывают величины сдвижек рельсовых нитей и непрерывно или циклично выправляют железнодорожный путь в соответствии с величинами сдвижек рельсовых нитей, в процессе выправки пути определяют местоположение выправочного устройства, редуцируя результаты измерения стрелы изгиба рельсовых нитей в плане, и положение рельсовых нитей по уровню в зоне выправки пути с системой координат спутниковой базовой станции с помощью спутниковой системы позиционирования.
В устройстве для выправки железнодорожного пути, содержащем монтируемые на путевой машине подъемно-рихтовочное устройство (ПРУ), устройство управления подъемно-рихтовочным устройством, представляющим собой компьютер и контрольно-измерительное устройство, включающее в себя датчик пройденного пути, по меньшей мере, три измерительные тележки, тросы, натянутые между соответствующими измерительными тележками, и установленные на соответствующих измерительных тележках и соединенные с компьютером, датчики уровня и датчики стрел изгиба рельсовых нитей в плане, снабжено двумя спутниковыми антеннами, приемником спутниковой системы позиционирования, модемом и актуатором смещения троса, жестко связанным с передней измерительной тележкой и подключенным к компьютеру, при этом антенны установлены перпендикулярно продольной оси выправочной машины, их выходы соединены с соответствующими входами приемника спутниковой системы позиционирования, первый и второй вход которого связаны соответственно с компьютером и модемом, принимающим сигналы базовой спутниковой станции.
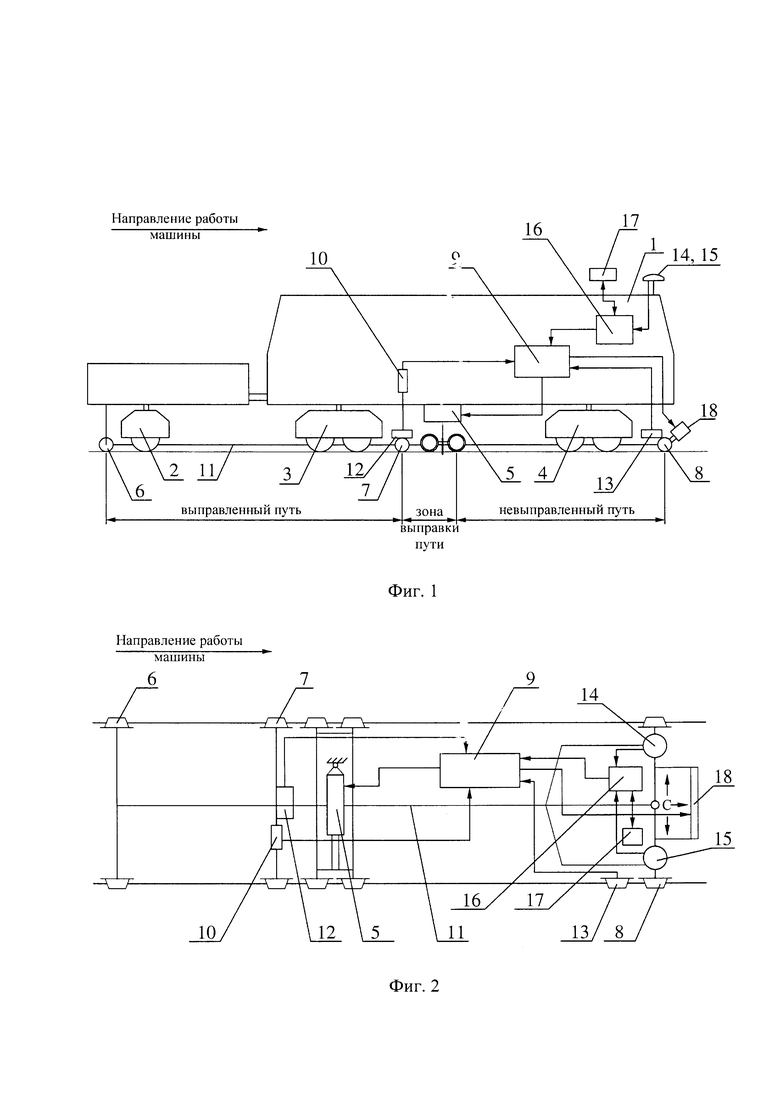
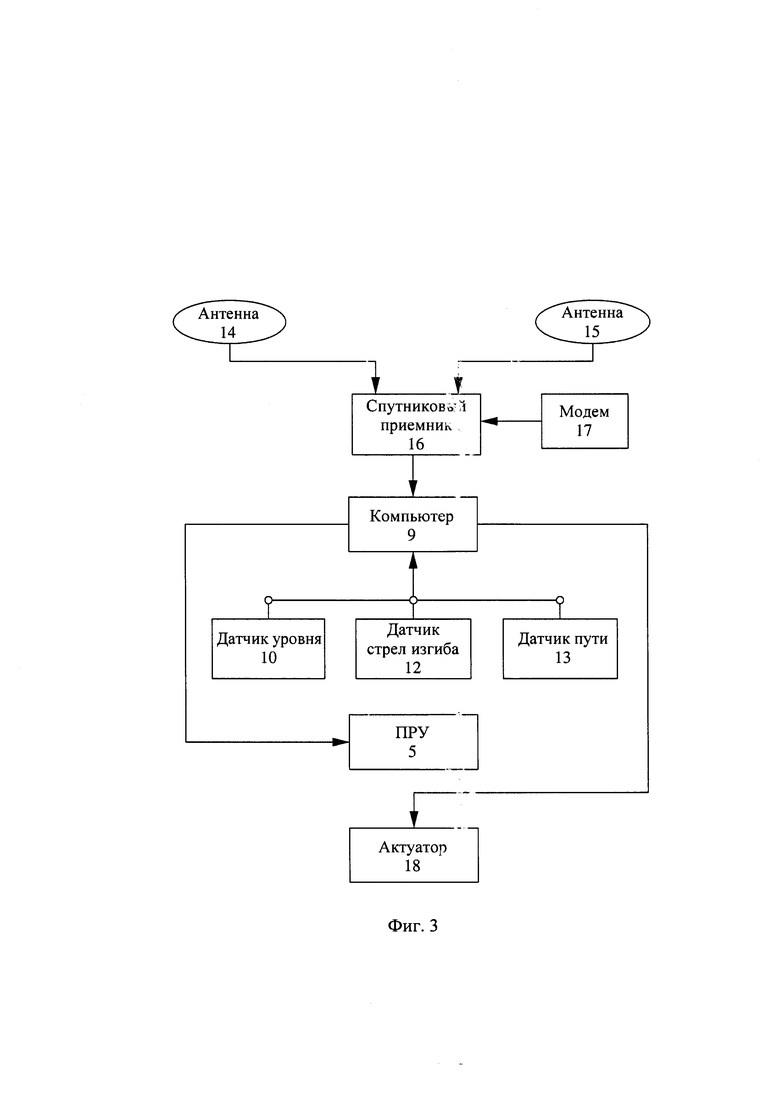
На представленных чертежах на фиг.1 схематично представлено устройство для выправки железнодорожного пути, на фиг.2 - устройство для выправки пути, вид сверху, на фиг.3 - структурная схема устройства.
Устройство содержит раму 1, опирающуюся на ходовые тележки 2, 3, 4, жестко связанные с рамой 1, подъемно-рихтовочное устройство (ПРУ) 5, контрольно-измерительное устройство, включающее в себя жестко связанные с рамой 1 измерительные тележки 6, 7, 8 и компьютер 9, управляющий подъемно-рихтовочным устройством 5. На ПРУ 5 установлен датчик уровня 10 для измерения возвышения рельсовых нитей. Между тележками 6 и 8 натянут трос 11, относительно которого измеряют стрелы изгиба рельсовых нитей в плане при помощи датчика стрел изгиба рельсовых нитей в плане 12, установленного на тележке 7. На измерительной тележке 8 установлен датчик пути 13. Датчики: уровня 10, пути 13, стрел изгиба 12 соединены с первым входом управляющего компьютера 9, первый выход которого связан с подъемно-рихтовочным устройством (ПРУ) 5. На раме 1 установлены две спутниковые антенны 14 и 15 в сечении перпендикулярном продольной оси выправочного устройства и связанные с приемником 16, который связан со вторым входом компьютера 9 и модемом 17, при этом модем 17 (радио или GSM) связан со спутниковой постоянно действующей референц-сетью по стандартным протоколам. Фазовые центры спутниковых антенн 14 и 15 расположены над передним концом трос-хордовой системы и соответственно измерительной тележкой 8, к которой крепится трос 11 трос-хордовой системы, включающей собственно трос 11, измерительные тележки 6,7,8, датчик стрел изгиба 12, датчик уровня 10, ПРУ 5, компьютер 9, второй выход компьютера 9 связан с устройством смещения в виде актуатора 18 переднего конца троса 11 на измерительной тележке 8.
Для обеспечения выправки пути (постановки в проектное положение) по уровню, в плане до начала работ создают (ориентировочно за месяц) цифровой проект, включающий пространственные координаты положения оси пути в плане и величину возвышения рельса, который полностью соответствуют проектным традиционным решениям (на бумаге).
Выправка железнодорожного пути согласно изобретению осуществляется следующим образом.
При движении выправочной машины, оснащенной предлагаемым устройством, по выправляемому пути сигнал с антенн 14 и 15 (с координатами фазовых центров) с навигационных спутников ГНСС поступает на приемник 16. При этом синхронно с базовой станций дифференциальной коррекции (спутниковой референц-сети) сигнал поступает на модем 17 и далее на приемник 16 передается дифференциальная поправка на отклонения координат от заданных на базовой станции в координаты спутникового приемника на выправочной машине для определения местоположения с высокой точностью в системе координат базовой станции в реальном времени. С приемника 16 координаты фазового центра с антенн 14 и 15 передаются в компьютер 9, который в соответствии с известными алгоритмами рассчитывает редукцию полученных значений координат на ось измерительной тележки 8 (в точке крепления троса 11). Компьютер 9 по разности в каждой i-ой точке фактического и проектного (из цифрового проекта) пространственного положения оси измерительной тележки 8 вычисляет значение смещения переднего конца троса 11 относительно проектного значения. Таким образом, в каждой i точке по текущим координатам спутникового приемника с учетом редукции на ось пути, вычисляется значение смещения переднего конца троса 11 на тележке 8 трос-хордовой системы. Данные значения в виде управляющего сигнала со второго выхода компьютера 9 передаются на вход актуатора 18, который в соответствии со значением управляющего сигнала смещает передний конец троса 11 трос-хордовой системы на измерительной тележке 8. В результате обеспечивается смещение переднего конца троса 11 в проектное положение (трос 11 в любой i точке будет находиться в проектном положении, т.е. его координаты будут совпадать с проектными координатами оси пути). Синхронно с перемещениями переднего конца троса 11 выполняется процесс сглаживания по традиционной схеме для трос-хордовых систем по алгоритмам и регламентам для конкретного типа выправочной системы.
Сигналы с датчиков 10, 12, 13 поступают в компьютер 9, который по известным алгоритмам рассчитывает величины неровностей на длине измерительной хорды (трос 11) между измерительными тележками 6 и 8, а также величины отклонения от проектного уровня (проектных величин возвышения рельса) и формирует управляющие сигналы на сдвиг рельсовых нитей ПРУ 5. ПРУ 5 в соответствии с полученными сигналами от компьютера (первый выход) осуществляет сдвиг рельсовых нитей на заданную величину, устраняя, таким образом, неровности пути в плане на базе длины хорды, длина которой определяется расстоянием между измерительными тележками 6 и 8 в плане. Расчет величины сдвижки выполняется по результатам измерения датчиком 12, установленном на измерительной тележке 7, изменения положения троса 11 относительно нулевого значения (в исходной точке на прямолинейном участке). Отклонение от нулевого значения, измеренного датчиком 12, включают смещение положения троса на измерительной тележке 7 из-за смещения конца троса 11 на измерительной тележке 8 и неровности пути на хорде между измерительными тележками 6 и 8. Суммарная величина сдвижки переднего конца на передней измерительной тележке и неровности пути на длине измерительной хорды, обеспечивает устранение неровностей пути и постановку пути в проектное положение одновременно.
Алгоритмы сглаживания (устранения) неровностей на хорде известны и широко применяются в различных типах подъемно-рихтовочных (выправочных) машин.
Преимущества заявленного способа выправки железнодорожного пути обеспечиваются за счет измерения фактических координат оси пути на передней измерительной тележке трос-хордовой системы, сравнении их с проектными данными, вычисления сдвижек и смещения переднего конца троса трос-хордовой системы на величину сдвижки по сигналу рассогласования соответствующему разности фактического и проектного положения оси пути. При этом обеспечивается возможность одновременного сглаживания за счет трос-хордовой систем неровностей и постановки в проектное положение пути за счет смещения переднего конца троса трос-хордовой системы на величину разности между проектными и фактическими координатами оси пути, полученными спутниковой аппаратурой позиционирования ГНСС, работающей в реальном времени с дифференциальной спутниковой системой и коррекцией от спутниковой референц-сети или временных спутниковых базовых станций.
Основным преимуществом данного способа и устройства является возможность не меняя алгоритм, программное обеспечение штатных трос-хордовых систем, например ВПО-С, ВПО 3-3000, ЭЛБ-4С и других, расширить функциональные возможности за счет смещения переднего конца троса и обеспечить не только сглаживание, но и постановку пути в проектное положение.
Главным преимуществом при этом является исключение каких-либо дополнительных изменений до начала выправочных работ или в процессе выправки, предварительных расчетов сдвижек для каждого прохода машины и формирования проекта по сдвижкам, т.к. они рассчитываются в процессе выправки в реальном времени.
Кроме того, установка дополнительного оборудования для расширения функциональных возможностей не требует изменений алгоритмов и программного обеспечения штатного оборудования, что обеспечивает возможность модернизировать для расширения функциональных возможностей действующие выправочные машины.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2230848C2 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2001 |
|
RU2212486C2 |
| УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2013 |
|
RU2551637C2 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ В ПЛАНЕ, ПРОДОЛЬНОМ ПРОФИЛЕ И ПО УРОВНЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2320801C1 |
| СПОСОБ ПРОВЕДЕНИЯ РЕМОНТОВ И РЕКОНСТРУКЦИИ ЖЕЛЕЗНОДОРОЖНОЙ ИНФРАСТРУКТУРЫ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2465385C1 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 1996 |
|
RU2098538C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2011 |
|
RU2454498C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2014 |
|
RU2565429C1 |
| ПУТЕВАЯ МАШИНА | 2001 |
|
RU2196860C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
Изобретение относится к области путевого хозяйства, в частности к выправке железнодорожного пути, и может быть использовано при планово-предупредительной выправке, при постановке пути в проектное положение и отделке пути после капитального ремонта. Способ заключается в том, что измеряют стрелы изгиба рельсовых нитей в плане, рельсовых нитей по уровню, рассчитывают величины сдвижек рельсовых нитей и непрерывно или циклично выправляют железнодорожный путь в соответствии с величинами сдвижек рельсовых нитей, перед каждым циклом выправки пути определяют местоположение выправочного устройства, редуцируя результаты измерений с системой координат спутниковой базовой станции с помощью спутниковой системы позиционирования. Устройство для выправки содержит подъемно-рихтовочное устройство, компьютер, контрольно-измерительное устройство, включающее датчик пройденного пути, три измерительные тележки, тросы, натянутые между измерительными тележками, и установленные на них и соединенные с компьютером датчики уровня и датчики стрел изгиба рельсовых нитей в плане, две спутниковые антенны, соединенные с приемником спутниковой системы позиционирования, первый и второй вход которого связаны с компьютером и модемом, принимающим сигналы базовой спутниковой станции и актуатор смещения тросов в горизонтальной плоскости, жестко связанный с передней измерительной тележкой, подключенный к компьютеру. Достигается повышение точности выправки пути и снижение времени ее проведения. 2 н.п. ф-лы, 3 ил.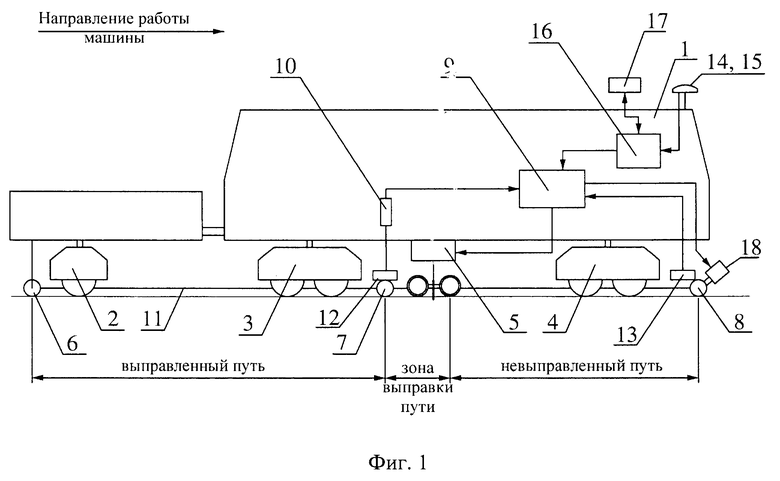
1. Способ выправки железнодорожного пути, заключающийся в том, что измеряют стрелы изгиба рельсовых нитей в плане и положение рельсовых нитей по уровню, рассчитывают величины сдвижек рельсовых нитей и непрерывно или циклично выправляют железнодорожный путь в соответствии с величинами сдвижек рельсовых нитей, отличающийся тем, что в процессе выправки пути определяют местоположение выправочного устройства, редуцируя результаты измерения стрелы изгиба рельсовых нитей в плане и положение рельсовых нитей по уровню в зоне выправки пути с системой координат спутниковой базовой станции с помощью спутниковой системы позиционирования.
2. Устройство для выправки железнодорожного пути, содержащее монтируемые на путевой машине подъемно-рихтовочное устройство, устройство управления подъемно-рихтовочным устройством, представляющим собой компьютер и контрольно-измерительное устройство, включающее в себя датчик пройденного пути, по меньшей мере, три измерительные тележки, тросы, натянутые между соответствующими измерительными тележками, и установленные на соответствующих измерительных тележках и соединенные с компьютером датчик уровня и датчик стрел изгиба рельсовых нитей в плане, отличающееся тем, что оно снабжено двумя спутниковыми антеннами, приемником спутниковой системы позиционирования, модемом и актуатором смещения тросов в вертикальной плоскости, жестко связанным с передней измерительной тележкой и подключенным к компьютеру, при этом антенны установлены перпендикулярно продольной оси выправочной машины, их выходы соединены с соответствующими входами приемника спутниковой системы позиционирования, первый и второй вход которого связаны соответственно с компьютером и модемом, принимающим сигналы базовой спутниковой станции.
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И МАШИНА ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2001 |
|
RU2230848C2 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2011 |
|
RU2454498C1 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ВЫПРАВКОЙ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2014 |
|
RU2565429C1 |
| Способ определения пространственных координат и геометрических параметров рельсового пути и устройство для его осуществления | 2016 |
|
RU2628541C1 |
| Способ автоматического контроля качества уплотнения балластного слоя рельсового пути и устройство для его осуществления | 2018 |
|
RU2703819C1 |
| ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНАЯ МАШИНА ДЛЯ ВЫПРАВКИ И КОНТРОЛЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ВЫПРАВОЧНО-ПОДБИВОЧНО-РИХТОВОЧНОЙ МАШИНЫ | 2010 |
|
RU2443826C2 |
| US 2002078853 A1, 27.06.2002 | |||
| Способ получения ферроцианида циркония | 1978 |
|
SU710613A1 |

