Изобретение относится к способу управления функциями набора стрел или прикрепленного к ним деревообрабатывающего устройства в связи с процессом валки дерева, причем происходит:
- определение и/или оценка положения или состояния в отношении по меньшей мере одной степени свободы набора стрел,
- определение текущего рабочего состояния деревообрабатывающего устройства,
- управление деревообрабатывающим устройством с использованием первого средства управления,
- управление набором стрел с использованием второго средства управления.
Изобретение также относится к соответствующему устройству и лесозаготовительной машине.
При использовании деревообрабатывающего устройства для валки дерева оператору часто бывает трудно видеть функционирование харвестерной головки и рассчитать время движений, которое потребуется при валке дерева с использованием набора стрел, содержащих деревообрабатывающее устройство. Такая ситуация повторяется, например, при приближении харвестерной головки к дереву, когда оператор должен направить харвестерную головку к дереву с помощью набора стрел, закрывая в то время зачистные лезвия харвестерной головки для захвата дерева. Тогда оператору будет легко перемещать харвестерную головку на слишком большой скорости с помощью набора стрел, так что харвестерная головка ударится о дерево на слишком большой скорости, возможно повредив дерево, харвестерную головку, набор стрел или все вышеперечисленное.
Другим примером проблемной ситуации является валочное спиливание дерева, после чего оператор перемещает комель дерева с использованием харвестерной головки, путем перемещения набора стрел в область, в которой происходит обработка дерева. Если в этой ситуации оператор перемещает харвестерную головку с использованием набора стрел, в то время, когда происходит процесс валки, режущее устройство, например, режущая пила, может быть повреждено. Таким образом, проблема заключается в том, что из-за плохой видимости оператор может легко повредить лесозаготовительную машину или подлежащий валке ствол дерева, или и то и другое.
Другая связанная с этим проблема заключается в том, что для того, чтобы избежать повреждения оператор может легко продолжать ждать слишком долго, например, когда валочное спиливание закончено, даже когда было бы безопасно выполнить перемещение стрел. Таким образом время тратится на ненужное ожидание, и эффективность работы уменьшается. Одни и те же рабочие этапы валки-распила могут повторяться 500-2000 раз в течение рабочей смены, так что дополнительное ожидание, например, секунды на одном рабочем этапе, может привести к потере до нескольких десятков минут рабочего времени. Ненужное длительное ожидание для перемещения набора стрел также может привести к опасной ситуации, потому что валку дерева обычно определяют по перемещению комля дерева в направлении, противоположном направлению валки.
Автоматизированная система управления положением инструмента, подвешенного на конце набора стрел, известна из публикации FI 123932 B. В этой системе управления положением инструмента, например, положением харвестерной головки при приближении к дереву, также управляют одновременно с помощью команд управления набором стрел. Недостаток такой системы состоит в том, что для полной автоматизации требуется обширное зондирование, и лесозаготовительная машина может быть повреждена в результате ошибочного измерения путем зондирования.
Кроме того, зондирование увеличивает не только производственные затраты и цену машины, но также и количество возможных мест неисправности в машине, так что вероятность системных сбоев и необходимость в техническом обслуживании также возрастают.
Изобретение предназначено для создания более простого способа и устройства, чем решения предшествующего уровня техники, для управления функциями набора стрел или подвешенного на них деревообрабатывающего устройства в связи с валкой дерева. Отличительные признаки способа согласно настоящему изобретению изложены в пункте 1 прилагаемой формулы изобретения, а отличительные признаки устройства - в пункте 15. Кроме того, изобретение предназначено для создания более простой лесозаготовительной машины, чем решения предшествующего уровня техники, с помощью которой валочное спиливание дерева можно выполнять полуавтоматически. Отличительные признаки данного изобретения изложены в пункте 18 прилагаемой формулы изобретения.
Цель способа согласно изобретению может быть достигнута посредством способа управления функциями набора стрел или подвешенного на них деревообрабатывающего устройства в связи с процессом валки, причем положение или состояние набора стрел определяют или оценивают в отношении по меньшей мере одной степени свободы, определяют текущее рабочее состояние деревообрабатывающего устройства, управление деревообрабатывающим устройством осуществляют с использованием первого средства управления, а управление набором стрел осуществляют с использованием второго средства управления. В этом способе одно из набора стрел и деревообрабатывающего устройства представляет собой рабочий блок, а второе, соответственно, представляет собой блок управления, причем по меньшей мере одну предварительно записанную функцию, которая связана с первыми входными данными, созданными оператором для рабочего блока, задают в памяти, предпочтительно в памяти системы управления лесозаготовительной машины. В связи с процессом валки дерева предварительно записанную функцию рабочего блока автоматически выбирают из памяти на основе первых входных данных, созданных оператором, а вторые входные данные, которые содержат зависящий от условий критерий для запуска выбранной предварительно записанной функции рабочего блока, формируют на основе определенного в данный момент рабочего состояния блока управления. Кроме того, при соблюдении критерия вторых входных данных автоматически запускают выбранную предварительно записанную функцию рабочего блока, и автоматически выполняют выбранную предварительно записанную функцию рабочего блока, запускаемую посредством вторых входных данных.
Задав предварительно записанную в память функцию рабочего блока, рассматриваемую функцию можно выполнять автоматически, когда рабочее состояние блока управления и оператор разрешают выполнение функции. Таким образом, деревообрабатывающее устройство, набор стрел и дерево защищены двумя функциями безопасности, т.е., автоматизированной работой рабочего блока, что делает маловероятным, что оператор сломает лесозаготовительную машину. С другой стороны, лесозаготовительная машина защищена запуском функции рабочего блока, выполняемым оператором, так что автоматизированная функция рабочего блока не может быть запущена без надзора со стороны оператора в случае отклоняющихся ситуаций. Это позволяет исполнить лесозаготовительную машину и систему в более простой форме, так как способ может быть реализован без чрезмерного контроля и зондирования, требуемых при полной автоматизации.
В связи с этим термин «рабочий блок» относится к первой части, выбранной из деревообрабатывающего устройства и набора стрел, которая автоматически выполняет предварительно записанную функцию. Термин «блок управления», со своей стороны, относится ко второй части из деревообрабатывающего устройства и набора стрел, которая не является рабочим блоком, на основе рабочего состояния или положения, из которого может быть запущена предварительно выбранная функция. Работу блока управления предпочтительно выполняют вручную, тогда как работу рабочего блока выполняют автоматически в случае предварительно записанной функции.
В этой связи определение «в связи с процессом валки дерева» относится к функциям деревообрабатывающего устройства вплоть до распила дерева на более короткие части, предпочтительно вплоть до процесса распила. В процессе распила комель дерева отделяют от остальной части ствола дерева.
Способ предпочтительно используют в связи с лесозаготовительными машинами, предназначенными для валки и обработки деревьев. Лесозаготовительные машины также работают с очень тяжелыми деревьями, когда потребность в автоматизации возрастает, так как возрастают силы, воздействующие на набор стрел и деревообрабатывающее устройство, и, в свою очередь, также риск повреждения оборудования из-за неправильного использования.
Выбранную предварительно записанную функцию рабочего блока, запускаемую посредством вторых входных данных, предпочтительно выполняют автоматически в отношении по меньшей мере одной степени свободы определенного и/или оцененного положения рабочего блока.
Степенями свободы набора стрел могут быть перемещение набора стрел, направление движения набора стрел, ориентация набора стрел, вылет набора стрел, взаимные расположения стрел из набора стрел, загрузка набора стрел и расстояние конца набора стрел от основания.
Деревообрабатывающее устройство предпочтительно представляет собой харвестерную головку. В частности, харвестерная головка имеет несколько функций, которые со своей стороны могут помешать оператору видеть, какой этап харвестерная головка выполняет в данный момент. Поэтому полуавтоматическая работа способа согласно изобретению особенно выгодна в связи с харвестерными головками.
Согласно одному варианту осуществления по меньшей мере две предварительно записанные функции рабочего блока задают в памяти. Затем уже во время работы блока управления оператор может выбрать функцию, которая ему нужна, из нескольких предварительно записанных функций рабочего блока, если рабочее состояние блока управления таково, что есть альтернативы для следующей функции рабочего блока.
В этом способе предварительно записанную функцию рабочего блока задают в памяти перед валкой дерева. Затем еще до соблюдения критерия, содержащегося во вторых входных данных, относящихся к рабочему состоянию блока управления, оператор может выбрать предварительно записанную функцию рабочего блока, так что предварительно записанная функция рабочего блока может быть запущена немедленно при соблюдении критерия. Это экономит значительное количество времени даже в течение одной рабочей смены.
В этом способе первые входные данные формируют предпочтительно на основе одной или более переменных, причем этими переменными являются: сигнал управления первого средства управления, сигнал управления второго средства управления, определенное свойство дерева, определенное в данный момент рабочее состояние блока управления.
Хотя определенное свойство дерева или определенное в данный момент рабочее состояние блока управления непосредственно представляют собой события, которые вызывает не оператор, а автоматически выполняемые измерения, формирование из них первых входных данных требует одобрения оператора и, следовательно, его участия в работе. Например, определение свойства дерева требует от оператора направления деревообрабатывающего устройства для обработки дерева, так чтобы можно было определить свойства дерева.
В способе согласно первому варианту осуществления изобретения деревообрабатывающее устройство используют в качестве блока управления, а набор стрел в качестве рабочего блока. Функции деревообрабатывающего устройства часто направляют работу набора стрел во времени и задают правильное время для движений набора стрел.
Рабочее состояние, которое должно быть задано для деревообрабатывающего устройства, может быть одним или более из следующих: перемещение или положение зачистных лезвий деревообрабатывающего устройства, закрывающее или открывающее движение или положение подающих роликов деревообрабатывающего устройства или вращение подающих роликов, уровень или скорость изменения сжимающей силы зачистных лезвий или подающих роликов, положение деревообрабатывающего устройства, рабочая операция, предпочтительно вращение или рабочее состояние режущего устройства деревообрабатывающего устройства, положение или рабочее состояние режущей пилы, положение режущего устройства, предпочтительно режущей пилы деревообрабатывающего устройства, уровень высоты деревообрабатывающего устройства относительно основания набора стрел и положение или рабочее состояние устройства вращения деревообрабатывающего устройства. Запуск предварительно записанной функции набора стрел может зависеть от упомянутых выше функций, на основе которых критерий, содержащийся во вторых входных данных для запуска работы набора стрел, либо будет соблюден, либо не будет соблюден. В связи с этим термин «перемещение зачистных лезвий» может относиться к состоянию зачистных лезвий при движении.
Функцией набора стрел может быть изменение траектории движения набора стрел и/или изменение положения набора стрел в отношении по меньшей мере одной степени свободы и/или увеличение или устранение нагрузки на набор стрел в отношении по меньшей мере одной степени свободы или растягивающей силы, вызванной в дереве деревообрабатывающим устройством, путем нагрузки на другое рабочее устройство, принадлежащее набору стрел, без перемещения набора стрел или блокировки или перемещения других рабочих устройств набора стрел, т.е., освобождения движения других рабочих устройств набора стрел. Все эти функции таковы, что при небрежном выполнении или осуществлении в неподходящее время оператором можно повредить лесозаготовительную машину. Кроме того, функцией набора стрел может быть изменение траектории движения посредством сигнала управления, сформированного оператором, или первых входных данных, сформированных оператором.
Критерием, содержащимся во вторых входных данных, предпочтительно является изменение рабочего состояния деревообрабатывающего устройства. Термин «рабочее состояние» относится либо к функции, реализуемой в деревообрабатывающем устройстве, такой как, например, валочное спиливание и тому подобное, либо к перерыву между функциями. Например, прекращение валочного спиливания может быть одним из таких изменений рабочего состояния, которое служит в качестве критерия для запуска предварительно записанной функции набора стрел. То есть, когда валочное спиливание прекращают, может быть запущена функция набора стрел, если оператор подтвердил это с помощью первых входных данных.
Согласно предпочтительному варианту осуществления вторыми входными данными является вращение режущей пилы (пильной цепи) деревообрабатывающего устройства или положение фланца режущей пилы или его продвижение относительно диаметра комля подлежащего валке дерева, причем критерием является прекращение валочного спиливания, а функция набора стрел состоит в подъеме набора стрел и их складывании по направлению к основанию набора стрел. В этой связи термин «подъем набора стрел» предпочтительно относится к движению вверх подъемного цилиндра набора стрел, тогда как термин «складывание набора стрел» относится к движению складывающего цилиндра, который перемещает конец стрел по направлению к основанию. Кроме того, функция набора стрел может предпочтительно также включать боковое перемещение набора стрел при складывании набора стрел, когда конец набора стрел также частично перемещается в боковом направлении относительно основания набора стрел.
Согласно другому варианту осуществления набор стрел используют в качестве блока управления, а деревообрабатывающее устройство - в качестве рабочего блока.
Функцией деревообрабатывающего устройства может быть перемещение подающих роликов, выполняемое деревообрабатывающим устройством, причем первыми входными данными может быть перемещение набора стрел по направлению к дереву, параллельно ему, а вторыми входными данными может быть изменение положения подающих роликов. В таком случае автоматическое управление деревообрабатывающим устройством в соответствии с предварительно записанной функцией является предпочтительным.
Режущее устройство, используемое в способе деревообрабатывающего устройства, предпочтительно представляет собой цепную пилу, но оно также может быть гильотинным ножом, ножевидным режущим инструментом, циркулярной пилой или каким-либо другим режущим устройством, подходящим для резки дерева.
В системе согласно изобретению предпочтительно в памяти также хранят предварительно записанные первые входные данные, используя которые оператор может прервать предварительно записанную функцию набора стрел в середине выполнения функции. Таким образом, оператор может в любой момент прервать любую функцию, выполняемую полуавтоматичски, если произойдет что-то конкретное, и окружающая среда и/или лесозаготовительная машина окажутся под угрозой. Таким образом, риск, связанный с полностью автоматизированными функциями, исключен, так как оператор может запускать и прерывать работу автоматики.
В способе согласно изобретению предварительно записанные функции могут быть автоматическими траекториями движения/функциями рабочего блока, которые оператор в соответствии с предшествующим уровнем техники мог бы производить вручную одновременно с работой блока управления. В способе согласно изобретению траектории перемещения рабочего блока не ограничены, вместо этого они автоматизированы.
Предварительно выбранную функцию рабочего блока предпочтительно выполняют одновременно с функцией блока управления, выполняемой оператором. Зачастую обработка и валка дерева требуют одновременного использования как деревообрабатывающего устройства, так и набора стрел. В способе согласно изобретению функцию рабочего блока можно выполнять автоматически, так что оператор может сосредоточиться на выполнении функции блока управления вручную.
Цель устройства согласно изобретению может быть достигнута с использованием устройства для управления лесозаготовительной машиной в связи с процессом валки дерева, в котором лесозаготовительная машина включает в себя по меньшей мере набор стрел из двух частей, предпочтительно содержащий основную стрелу и поворотную стрелу, прикрепленное к набору стрел деревообрабатывающее устройство для валки деревьев, первые рабочие устройства, расположенные в деревообрабатывающем устройстве для выполнения функций деревообрабатывающего устройства, и вторые рабочие устройства, расположенные в связи с набором стрел для выполнения функций набора стрел. В дополнение к этому лесозаготовительная машина включает в себя первое средство управления для управления первыми рабочими устройствами вручную и второе средство управления для управления вторыми рабочими устройствами вручную для управления набором стрел и деревообрабатывающим устройством, а также первое средство определения для измерения и/или для оценки рабочего состояния деревообрабатывающего устройства, выполненное с возможностью получения первого результата определения, и второе средство определения для измерения или определения и/или для оценки положения набора стрел в отношении по меньшей мере одной степени свободы, выполненное с возможностью получения второго результата определения. Кроме того, лесозаготовительная машина включает в себя систему управления для использования сигналов управления, сформированных первым средством управления, и второе средство управления для управления первыми рабочими устройствами и вторыми рабочими устройствами. Устройство включает в себя память, соединенную с системой управления, и программное средство, снабженное памятью для управления первыми рабочими устройствами и вторыми рабочими устройствами по меньшей мере частично автоматически. В устройстве одно из набора стрел и деревообрабатывающих устройств представляет собой рабочий блок, а другое - блок управления. Программное средство выполнено с возможностью задавать в памяти по меньшей мере одну предварительно записанную функцию рабочего блока, которая связана с первыми входными данными для рабочего блока, и, в связи с процессом валки дерева, выбирать предварительно записанную функцию рабочего блока автоматически из памяти на основе первых входных данных, созданных оператором. Кроме того, программное средство выполнено с возможностью формирования вторых входных данных на основе рабочего состояния блока управления в данный момент, который включает в себя зависящий от условий критерий для запуска выбранной предварительно записанной функции рабочего блока, чтобы автоматически запускать выбранную предварительно записанную функцию рабочего блока при соблюдении зависящего от условий критерия вторых входных данных, и автоматически выполнять предварительно записанную выбранную функцию рабочего блока, запущенную посредством вторых входных данных.
В устройстве согласно изобретению предварительно записанные функции рабочего блока могут быть выполнены с помощью программного средства, как только оператор выбрал их с помощью первых входных данных, и рабочее состояние рабочего блока изменилось таким образом, чтобы было безопасно выполнять функцию рабочего блока. Это позволяет изготавливать устройство в значительно более легкой форме, чем полностью автоматизированные устройства, в которых требуется значительно расширенное зондирование для того, чтобы обнаружить возможные неисправные состояния при зондировании или сделать необходимые определения положения или рабочего состояния.
Деревообрабатывающее устройство предпочтительно представляет собой харвестерную головку, которая включает в себя инерциальный измерительный блок для определения состояния перемещения харвестерной головки и косвенно также подлежащего валке дерева. С помощью инерциального измерительного блока можно точно определить состояние перемещения харвестерной головки и косвенно также подлежащего валке дерева, а на его основе можно автоматизировать перемещения набора стрел для оптимизации конечного результата.
Программное средство предпочтительно выполнено с возможностью выполнения выбранной предварительно записанной функции, запускаемой посредством вторых входных данных автоматически на основе степени свободы, определенной и/или оцененной рабочим блоком.
Цель лесозаготовительной машины согласно изобретению может быть достигнута посредством лесозаготовительной машины, которая включает в себя устройство в соответствии с вышеупомянутым вариантом осуществления.
Посредством способа, устройства и лесозаготовительной машины согласно изобретению достигается преимущество, которое заключается в том, что можно облегчить управление ручными перемещениями на сложных рабочих этапах, так как программное средство рассчитывает время перемещений рабочего блока автоматически в соответствии с (завершением) рабочих этапов блока управления и предотвращает ущерб для функций до завершения предыдущего рабочего этапа. Использование изобретения также предотвращает поломку лесозаготовительной машины, так как предотвращаются функции, которые могли бы повредить лесозаготовительную машину во время неподходящего рабочего этапа или рабочего состояния. В качестве дополнительного преимущества, изобретение позволяет эффективно работать при плохой видимости, когда оператор не может видеть процесс валки, например, ночью, из-за снега, расстояния или зрения оператора. В качестве еще одного дополнительного преимущества изобретение позволяет работать без проблем на больших расстояниях, когда эффективность работы повышается, так как уменьшается необходимость перемещения лесозаготовительной машины и увеличивается рабочая скорость. Безопасность процесса валки и точность направления валки также улучшаются, потому что перемещение комля дерева начинают, насколько это возможно, в нужное время.
Далее изобретение подробно описано со ссылкой на прилагаемые чертежи, на которых показаны некоторые варианты осуществления изобретения, на которых:
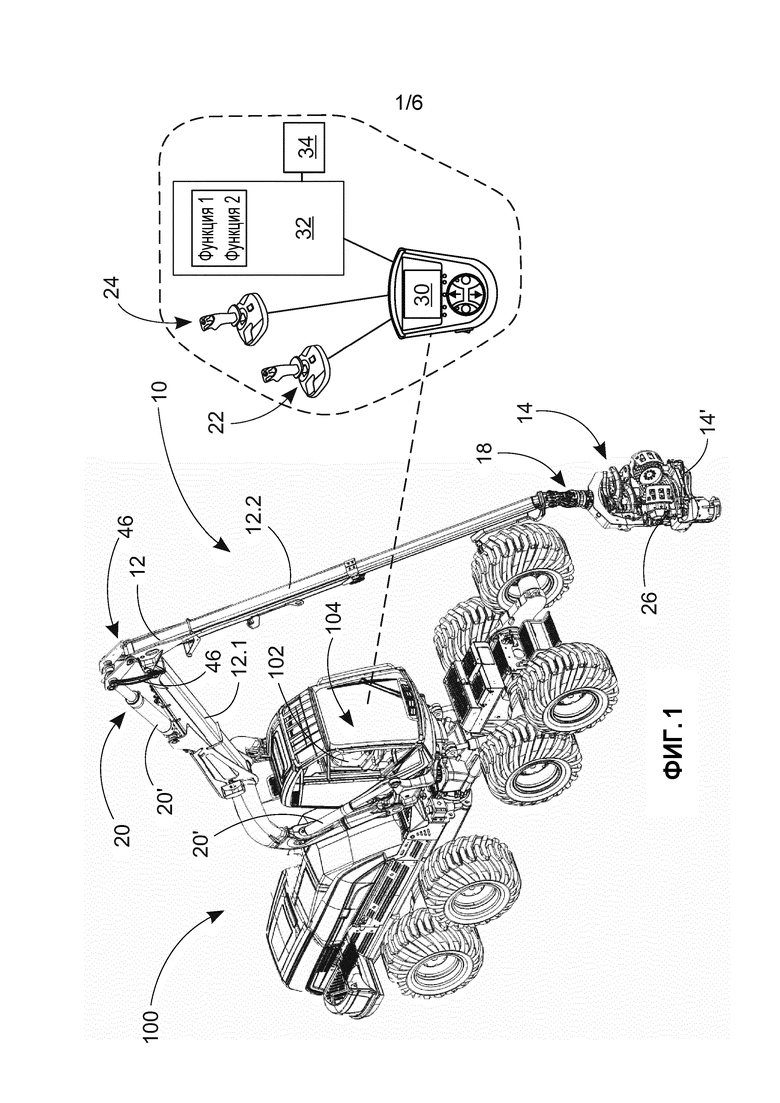
На фиг.1 показана лесозаготовительная машина согласно изобретению и устройство в ней в виде аксонометрической принципиальной схемы,
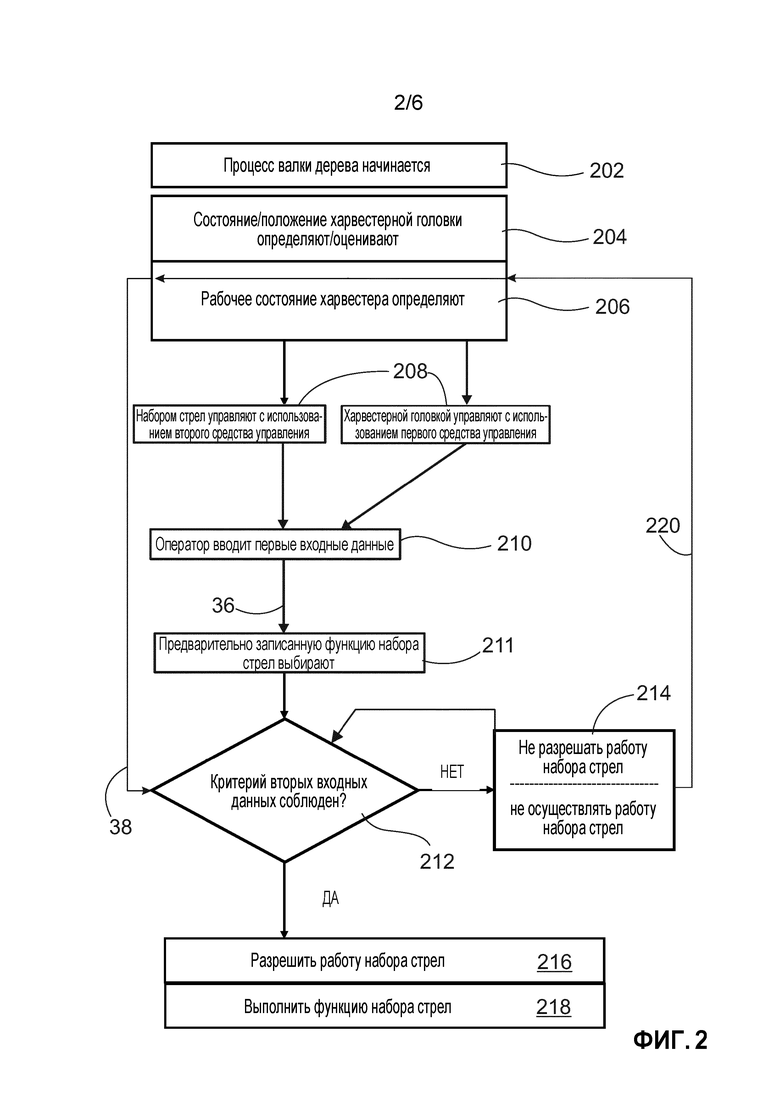
На фиг.2 показаны этапы способа согласно изобретению в виде блок-схем,
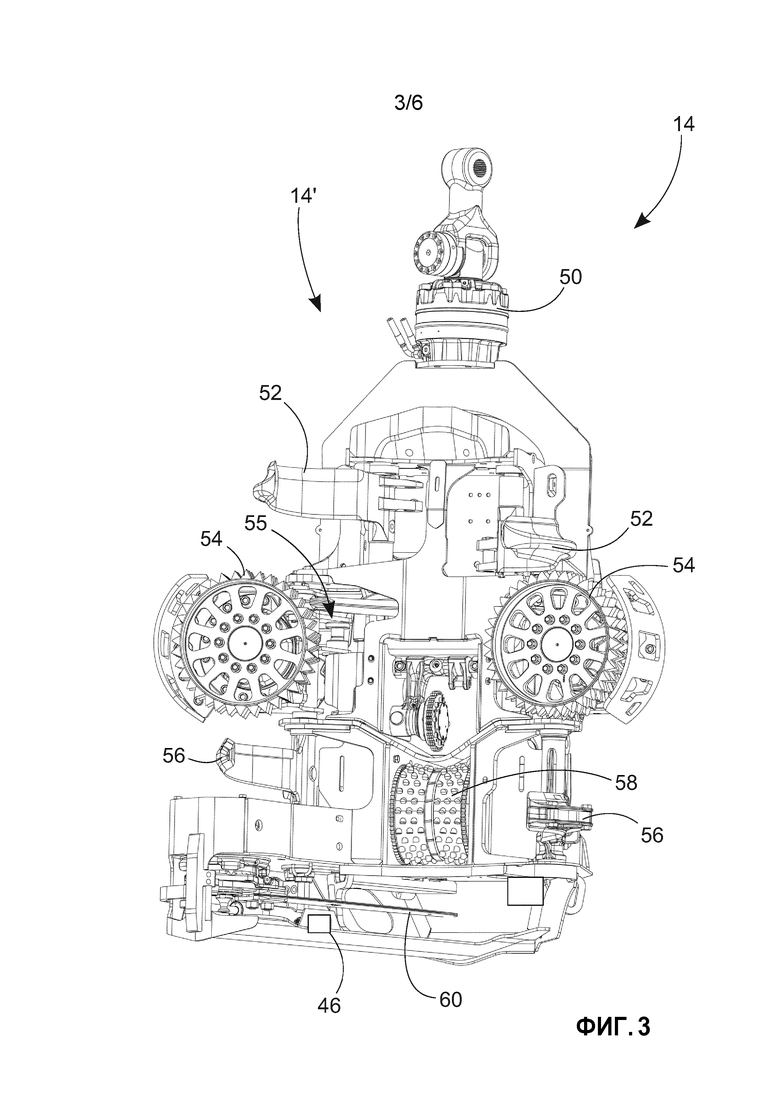
На фиг.3 показан вид сбоку одной харвестерной головки, когда она представляет собой деревообрабатывающее устройство лесозаготовительной машины,
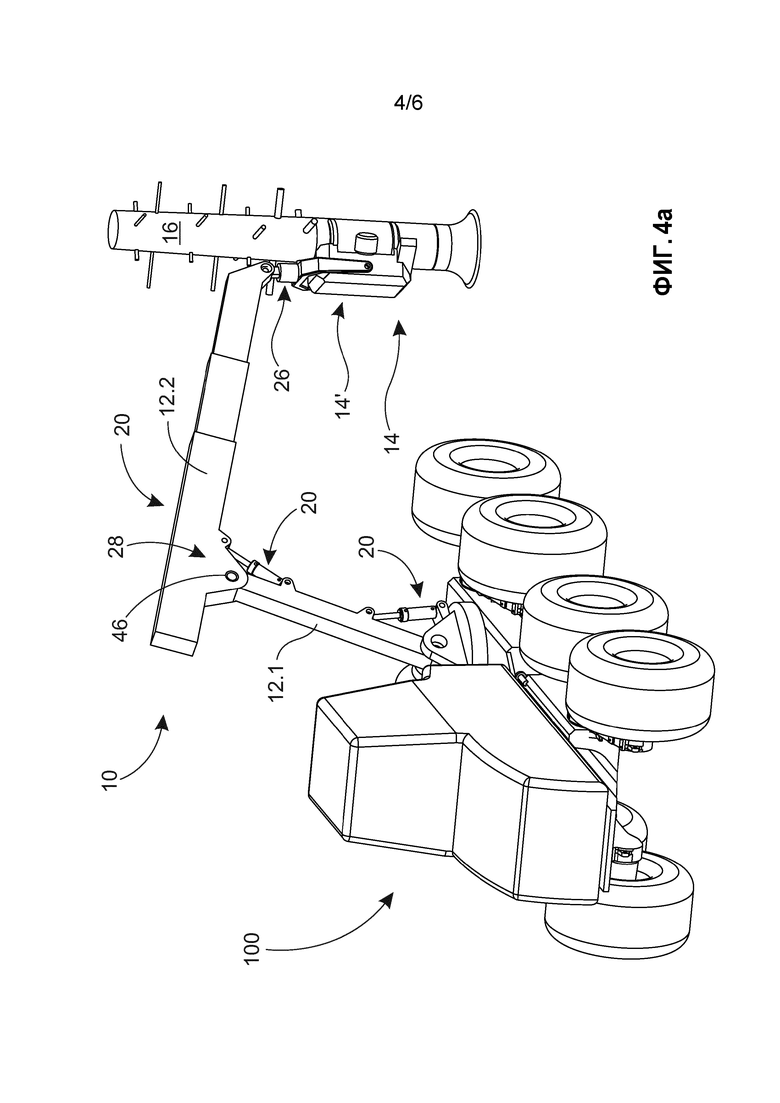
На фиг.4а показан процесс валки дерева аксонометрически, когда харвестерная головка захватила дерево,
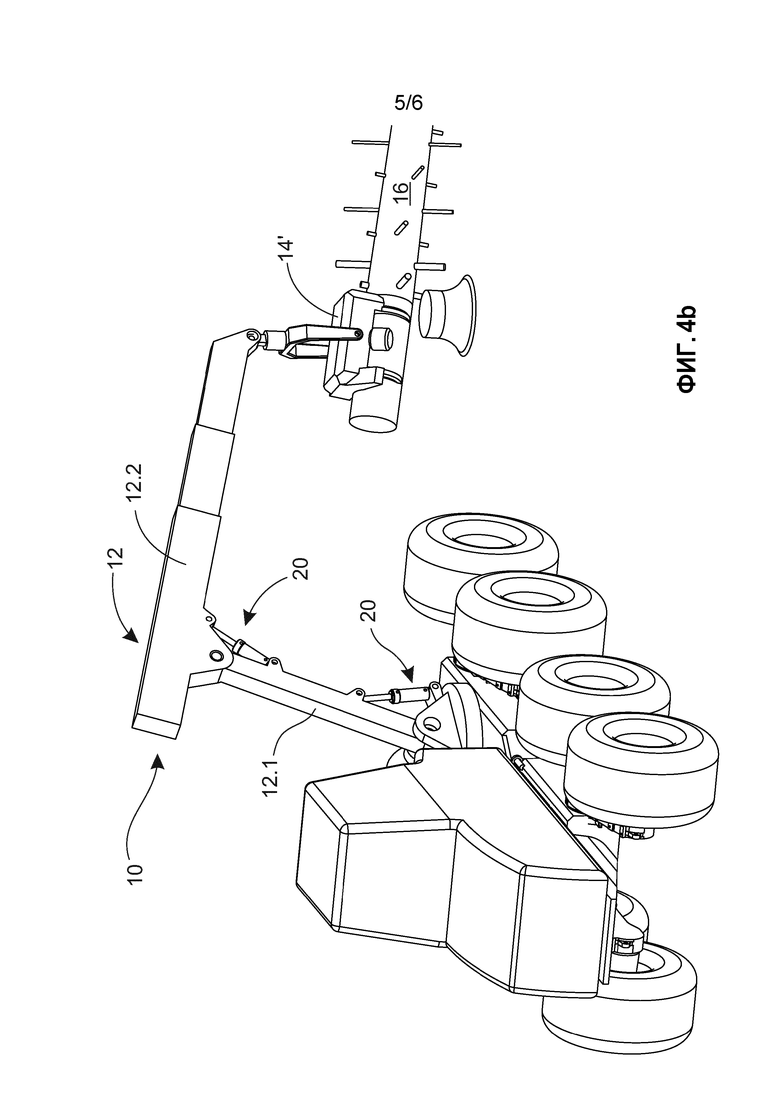
На фиг.4b показана валка дерева аксонометрически, когда оно было повалено и повернуто в положение для зачистки с помощью набора стрел и харвестерной головки,
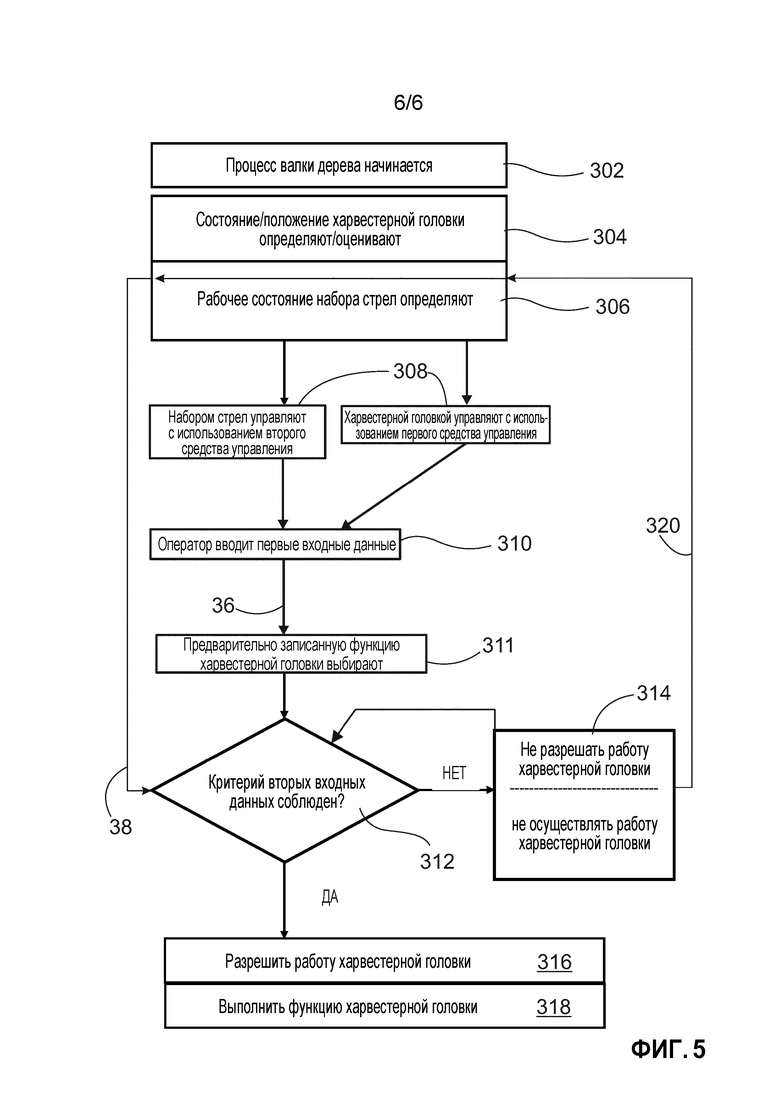
На фиг.5 показаны этапы второго варианта осуществления способа согласно изобретению в виде блок-схем.
На фиг.1 показано устройство 10 и лесозаготовительная машина 100 согласно изобретению. Устройство 10 согласно изобретению предпочтительно является частью лесозаготовительной машины 100, т.е., лесозаготовительную машину 100 оснастили устройством 10 согласно изобретению уже во время изготовления. В качестве альтернативы, устройство 10 может быть расположено в уже существующих лесозаготовительных машинах, в которых есть другие компоненты, необходимые для устройства.
В основном варианте осуществления изобретения, показанном на фиг.1-4b, набор стрел действует в качестве рабочего блока, а деревообрабатывающее устройство - в качестве блока управления, и работа и характеристики изобретения описаны в связи с этим вариантом осуществления. В связи с этим термин «основной вариант осуществления» относится к выбору набора стрел и деревообрабатывающего устройства в качестве рабочего блока и блока управления.
Устройство 10 может быть применено к лесозаготовительной машине 100, такой как, например, лесозаготовительная машина, оснащенная колесами или гусеничным шасси, которая включает в себя, по меньшей мере, набор стрел 12 и деревообрабатывающее устройство 14 вместе с рабочими устройствами 18 и 20, средствами 22 и 24 управления и средствами 26 и 28 определения. Предпочтительно, набор стрел представляет собой конструкцию, состоящую по меньшей мере из двух стрел, шарнирно соединенных друг с другом, т.е., главной стрелы 12.1 и поворотной стрелы 12.2, шарнирно соединенной с рамой 10 лесозаготовительной машины 100, к которой прикреплено деревообрабатывающее устройство 14 для валки деревьев 16. Поворотные стрелы из набора стрел предпочтительно содержат выдвижное удлинение, так называемое телескопическое удлинение, для увеличения вылета набора стрел. Деревообрабатывающее устройство 14 предпочтительно представляет собой харвестерную головку 14', показанную на фиг.1 и 3, которая либо подвешена, либо иным образом прикреплена к набору стрел 12. В дальнейшем при описании вариантов осуществления харвестерная головка будет использована в качестве примера деревообрабатывающего устройства, но следует понимать, что вместо харвестерной головки деревообрабатывающим устройством также может быть электрическое захватное устройство или другой инструмент, используемый в процессе валки.
Для выполнения функций харвестерной головки 14' лесозаготовительная машина 100 включает в себя первое рабочее устройство 18 харвестерной головки 14', которым могут быть, например, гидравлические цилиндры или двигатели, которые приводят в действие, например, устройство 50 вращения харвестерной головки 14' фиг.3, режущую пилу 60, зачистные лезвия 52 и 56, подающие ролики 54 и 58 и открывающий и закрывающий механизм 55 подающих роликов 54 и 58. Соответственно, для выполнения функций набора стрел 12, имеются вторые рабочие устройства 20, соединенные с набором стрел 12, которые являются, например, гидравлическими цилиндрами 20', поворачивающиеся между различными частями набора стрел 12.
Первое средство 22 управления управляет первыми рабочими устройствами 18 и посредством них работой харвестерной головки 14' вручную по меньшей мере, когда оператор сам управляет харвестерной головкой 14'. Второе средство 24 управления, в свою очередь, управляет работой вторых рабочих устройств 20 для управления набором стрел вручную по меньшей мере, когда оператор сам управляет набором стрел. Первое средство управления и второе средство управления также могут быть установлены на одном контроллере, который может быть расположен в лесозаготовительной машине или в точке дистанционного управления лесозаготовительной машиной с помощью телекоммуникационных линий. В более общем смысле первое средство управления и второе средство управления представляют собой джойстики, используемые оператором в кабине лесозаготовительной машины.
Так как в устройстве 10 и лесозаготовительной машине 100 согласно изобретению стремятся достичь полуавтоматизации перемещений набора стрел 12, должна быть возможность контролировать функции как харвестерной головки 14', так и набора стрел 12 автоматически. Первое средство 26 определения выполняет измерение и/или оценку рабочего состояния харвестерной головки 14', в результате чего получают первый результат определения. Средствами определения предпочтительно являются датчики, которые измеряют различные функции харвестерной головки 14', такие как скорость вращения или положение пильной цепи режущей пилы, положение зачистных лезвий, положение харвестерной головки и тому подобное. Инерциальный измерительный блок (ИМУ) также может быть использован в качестве вида датчика, на основе которого можно точно узнать положение и состояние перемещения харвестерной головки, но косвенно можно узнавать положение и состояние перемещения дерева. Таким образом, когда дерево находится достаточно плотно в тисках харвестерной головки (напротив нижней части и с соответствующей опорной силой режущего лезвия и подающих роликов) измерение длины дерева будет выполнено надежно. В дополнение к непосредственному измерению или вместо него можно также предсказать рабочие состояния харвестерной головки, т.е., оценить на основе предыдущих результатов определения, определенных у харвестерной головки. Это может означать, например, что на основе изменения скорости вращения режущей пилы или изменения скорости перемещения режущего фланца, или изменения потока или давления рабочей среды под давлением, можно будет оценить время прекращения валочного спиливания.
В связи с набором стрел 12 положение или состояние набора стрел 12 можно измерить и/или оценить с помощью второго средства 28 определения в отношении по меньшей мере одной степени свободы для того, чтобы получить второй результат определения. Предпочтительно вторым средством определения также являются датчики 46, с помощью которых, например, определяют текущее местоположение или положение набора стрел. В дополнение к этому или вместо этого можно также оценить местоположение, траекторию перемещения или внутренние напряжения в наборе стрел, которые могут быть созданы с помощью рабочих устройств. Кроме того, следует отметить, что также могут быть определены силы, действующие на дерево, которое валит харвестерная головка.
В лесозаготовительной машине сигналы управления, сформированные первым средством 22 управления и вторым средством 24 управления, преобразуют с помощью системы 30 управления в команды для клапанов, регулирующих перемещения рабочих устройств 18 и 20. Система 30 управления может быть, например, центральным компьютером лесозаготовительной машины 100, который путем использования шины CAN или подобной шины передачи данных передает команды управления между клапанами, управляющими средствами управления, средствами определения и рабочими устройствами.
В устройстве 10 согласно изобретению само устройство 10 включает в себя память 32, соединенную с системой 30 управления, и программное средство 34, расположенное в памяти 32. Программное средство предпочтительно действует между системой управления, средствами управления, средствами определения и рабочими устройствами, что позволяет оператору выполнять полуавтоматическую работу в дополнение к ручным командам. Программное средство предпочтительно представляет собой некоторое программное обеспечение или компьютерную программу, или компьютерный программный продукт, который работает в дополнение к системе управления. Согласно одному варианту осуществления программное средство также может быть расположено в конце дистанционного соединения, так что данные системы управления лесозаготовительной машиной отправляют в программное средство в другом месте с использованием дистанционного соединения. В устройстве 10 по меньшей мере одна предварительно записанная функция набора стрел 12, которая связана с первыми входными данными 36 для набора стрел, задана в памяти 32 с помощью программного средства 34. Это означает что, например, оператор может через графический пользовательский интерфейс системы 30 управления предварительно задать в памяти 32 траекторию перемещения набора стрел, которую он желает реализовать во время, после или перед какой-либо функцией харвестерной головки. В качестве альтернативы, эта предварительно записанная функция набора стрел может быть записана в память 32 уже на заводе. В качестве примера можно использовать ситуацию, в которой после валочного распила харвестерной головки подъем и перемещение дерева к местоположению обработки выполняют с помощью набора стрел.
В связи с этим термин «предварительная запись» означает, что в память записывают один или несколько сигналов управления для клапанов, управляющих вторыми рабочими устройствами набора стрел. Предпочтительно серия из нескольких сигналов управления относится к одной предварительно записанной функции. В дополнение к сигналам управления вторые входные данные и зависящий от условий критерий, который они содержат, с помощью которого могут быть реализованы сигналы управления, также заданы для контроля в случае каждой предварительно записанной функции набора стрел. Например, если предварительно записанная функция набора стрел представляет собой траекторию перемещения набора стрел, вторыми входными данными может быть, например, изменение скорости вращения пильной цепи режущей пилы, когда зависящим от условий критерием для запуска траектории перемещения набора стрел может быть внезапное увеличение скорости вращения пильной цепи, что указывает на то, что произошло спиливание.
Кроме того, вторыми входными данными для запуска траектории перемещения набора стрел может быть, например, падение скорости вращения режущей пилы ниже предельного значения или изменение скорости вращения до предельного значения. Другими альтернативами могут быть положение, скорость перемещения, скорость перемещения относительно скорости вращения пильной цепи и/или сила давления или скорость изменения в них фланца пилы.
В этом случае первые входные данные 36 для набора стрел предпочтительно представляют собой, например, команду какого-либо второго средства управления, с которым связана предварительно записанная функция набора стрел. Т.е., оператор может, например, путем вращения средства управления, такого как джойстик, выбрать предварительно записанную функцию, если он решит не выполнять рассматриваемую функцию вручную. Другими словами, когда оператор выполняет какую-либо команду средства управления, программное средство обнаруживает, что команда является такой же, как команда для выбора предварительно записанной функции набора стрел.
Когда первые входные данные 36 поступают от оператора в программное средство 34, программное средство 34 может автоматически выбрать предварительно записанную функцию набора стрел 12 из памяти 32 на основе первых входных данных 36, созданных оператором, и сформировать вторые входные данные 38 на основе рабочего состояния харвестерной головки 14' в тот момент, который содержит критерий, предпочтительно зависящий от условий, для запуска предварительно записанной функции набора стрел 12. Другими словами программное средство 34 собирает результаты определения, сформированные первым средством определения, и на их основе формирует вторые входные данные 38, т.е., команду запуска для выполнения предварительно записанной функции набора стрел, когда какой-либо критерий, такой как, например, прекращение валочного распила, будет соблюден. Таким образом, предварительно записанную функцию набора стрел не запускают до того, как критерий будет соблюден, и можно будет безопасно начать выполнять функции набора стрел, не ломая харвестерную головку и не нанося вред окружающей среде. В качестве практического примера датчик, контролирующий положение режущей пилы харвестерной головки, уведомляет систему управления о положении режущей пилы. Когда диаметр дерева известен на основании данных, определенных с помощью зачистных лезвий и/или подающих роликов, и в то же время угол вращения контролируют с помощью корпуса пилы фланца пилы режущей пилы, можно будет предположить, когда дерево было бы спилено. Условие критерия состоит в том, что дерево спиливают, и когда оно соблюдено, может быть запущена предварительно выбранная функция набора стрел.
Альтернативным критерием может быть изменение скорости вращения режущей пилы, когда спиливание дерева может быть обнаружено по ускорению в скорости вращения пилы. Вторым альтернативным критерием может быть изменение скорости вращения фланца пилы режущей пилы, когда при спиливании можно обнаружить ускорение в скорости вращения фланца пилы. Третья альтернатива - контролировать давление, действующее на двигатель режущей пилы, когда снижение давления говорит о спиливании. Четвертая альтернатива заключается в контроле изменения тока, если двигатель режущей пилы электрический. Пятая альтернатива - контролировать ускорение харвестерной головки с помощью инерциального измерительного блока, когда изменение в нем можно интерпретировать как то, что происходит спиливание. В дополнение к этому критерием также могут быть некоторые другие данные, полученные с помощью средства определения.
Наконец, программное средство выполнено с возможностью выполнять предварительно записанную функцию набора стрел 12, запущенную посредством вторых входных данных 38 автоматически на основе положения набора стрел 12, определенного и/или оцененного в отношении по меньшей мере одной степени свободы. Другими словами, указанное программное средство 34 направляет в память 32 сигнал или сигналы управления, относящиеся к предварительно записанной функции набора стрел, от системы 30 управления к клапанам, управляющим рабочими устройствами набора стрел для того, чтобы управлять вторыми рабочими устройствами.
Далее описаны этапы способа согласно изобретению в качестве этапов 202-220 в соответствии с фиг.2. Способ согласно изобретению относится к управлению набором стрел в связи с процессом валки дерева, т.е., с процессами, предшествующими разрезающему распиливанию поваленного дерева. Следует понимать, что, хотя этапы 202-220 показаны как последовательные на фиг.2, этапы 204-208 происходят на практике одновременно. В соответствии с этапом 204 рабочее состояние харвестерной головки определяют и/или оценивают непрерывно с помощью первого средства определения, так что система управления и оператор имеют информацию о состоянии харвестерной головки в данный момент. Рабочее состояние харвестерной головки может быть активным состоянием, в котором первые рабочие устройства выполняют определенную функцию в харвестерной головке, или пассивным состоянием, в котором харвестерная головка ожидает работы набора стрел. В соответствии с этапом 206, в то же время рабочее состояние набора стрел определяют и/или оценивают непрерывно с помощью второго средства определения, так что система управления и оператор имеют информацию о текущем рабочем состоянии набора стрел. Рабочее состояние набора стрел может быть активным состоянием, в котором вторые рабочие устройства выполняют определенную функцию набора стрел, т.е., траекторию перемещения или напряжение в наборе стрел, или пассивным состоянием, в котором набор стрел ожидает работы харвестерной головки или заблокирован. Этапы 204 и 206 происходят непрерывно на протяжении всех этапов способа.
В соответствии с этапом 208, в связи с процессом валки, харвестерной головкой управляют с помощью первого средства управления для выполнения процесса валки дерева и для поддержки дерева для подачи при перемещении дерева. Соответственно, рабочими операциями набора стрел управляют с помощью второго средства управления, чтобы подвести харвестерную головку к дереву, и чтобы харвестерная головка поддерживала дерево, чтобы переместить его в требуемое местоположение для дальнейшей обработки. В дополнение к этому, набор стрел можно быть использован для нагрузки на дерево с помощью харвестерной головки путем толкания, тяги и/или подъема дерева или устранения напряжения с дерева, если харвестерную головку перемещают с помощью подающих роликов вдоль ствола еще не поваленного дерева. Рабочие операции управления на этапе 208 предпочтительно выполняют вручную посредством действия оператора, т.е., оператор управляет рабочей операцией с помощью первого средства управления и второго средства управления.
Оператор может до процесса валки дерева, во время процесса валки дерева или после процесса валки дерева выбрать какую-либо предварительно записанную функцию набора стрел в соответствии с фазой 210, которую он желает выполнить автоматически. Выбор может быть осуществлен, например, с использованием второго средства управления. Сигнал управления второго средства управления в таком случае действует в качестве первых входных данных 36 для программного средства, когда выбрана предварительно записанная функция набора стрел из памяти в соответствии с этапом 211. Чтобы предварительно записанная функция набора стрел могла быть выполнена, требуются вторые входные данные 38 в дополнение к первому средству определения харвестерной головки, которые определяют рабочее состояние харвестерной головки в данный момент. Это определение происходит непрерывно, как указывалось ранее, когда в дополнение к рабочему состоянию требуется зависящий от условий критерий, содержащийся во вторых входных данных, который определяет допустимые рабочие состояния харвестерной головки или их подобласти. Соблюдение критерия непрерывно контролируют, когда первые входные данные достигают программного средства в соответствии с этапом 212. Если критерий не соблюден в соответствии с этапом 214, предварительно записанная функция набора стрел не может быть запущена, но вместо этого программное средство продолжает программный цикл 220 проверки критерия, который повторяет этапы 206, 212 и 214 до тех пор, пока критерий не будет соблюден. Другими словами, результат определения указанного первого средства определения непрерывно сравнивают с предельным значением или значениями критерия, и когда результат определения находится в разрешенной области, т.е., в области, соответствующей критерию, предварительно записанная функция набора стрел может быть разрешена, т.е., сигналы управления могут быть переданы в соответствии с этапом 216. Предварительно записанная функция набора стрел может затем быть выполнена в соответствии с этапом 218.
Далее следует описание использования различных вариантов осуществления способа согласно изобретению с помощью фиг.3-4b. Согласно первому варианту осуществления способ согласно изобретению можно использовать на этапе валки дерева до того, как дерево будет повалено, или при приближении к дереву и при захвате дерева. Предварительно записанная функция набора стрел - это, в таком случае, траектория перемещения по направлению к дереву набора стрел, происходящего с ограниченной скоростью, в то время как зачистные лезвия приближаются к дереву. Таким образом предотвращается слишком быстрое перемещение харвестерной головки к дереву, и снижается риск поломки зачистных лезвий.
Второй вариант осуществления выполняют до процесса валки дерева 16, когда дерево 16 захвачено харвестерной головкой 14', зачистные лезвия харвестерной головки 14' закрыты, а также подающие ролики закрыты на дереве в соответствии с Фиг.4а. Затем, при перемещении харвестерной головки к комлю дерева или при перемещении харвестерной головки с использованием подающих роликов вверх на стволе дерева, в качестве предварительно записанной функции набора стрел набором стрел управляют или набор стрел используют для контроля перемещения харвестерной головки, чтобы уменьшить напряжения в наборе стрел. Таким образом, уменьшается напряжение в наборе стрел, которое возникает, когда харвестерная головка перемещается по дереву с использованием подающих роликов, и положение конца набора стрел изменяется, в то время как шарниры набора стрел остаются неподвижными.
В соответствии с третьим вариантом осуществления, когда харвестерная головка захватывает дерево, харвестерную головку проталкивают в каком-либо направлении путем перемещения набора стрел для того, чтобы создать требуемое напряжение и предпочтительно также направление. Предварительное напряжение может быть в трех направлениях: вверх, вперед, сбоку или их комбинацией. Предварительно записанная функция набора стрел - это, в таком случае, перемещение набора стрел в требуемом направлении для того, чтобы подвергнуть напряжению ствол дерева и/или набор стрел.
В соответствии с четвертым вариантом осуществления толкание большого дерева разрешено перед валкой, так что дереву помогают падать в правильном направлении, и снижается риск падения дерева в неправильном направлении или в направлении лесозаготовительной машины.
В соответствии с пятым и особенно предпочтительным вариантом осуществления предварительно записанной функцией набора стрел в связи с процессом валки является блокировка вторых рабочих устройств. Тогда вторыми входными данными является скорость вращения режущей пилы, при которой, когда она больше 0, вторые рабочие устройства набора стрел заблокированы, и перемещение набора стрел не допускается.
Предварительно записанная функция набора стрел в шестом варианте осуществления является траекторией перемещения набора стрел, которая может быть реализована, при соблюдении критерия вторых входных данных. Здесь критерием является скорость вращения режущей пилы, при которой, когда она равна нулю, может быть реализована предварительно записанная траектория перемещения. Другими словами, перемещение набора стрел не допускается, когда режущая пила режет дерево. Указанная траектория перемещения набора стрел может быть частично поднимающей (первоначально) и частично тянущей по направлению к машине, или к местоположению обработки, или к местоположению резки-распила. Термин «место резки-распила» относится к месту, где поваленное дерево может быть очищено и нарезано в соответствии со способом сортиментной заготовки и вывозки древесины (CTL). На фиг.4b набор стрел 12 и харвестерная головка 14' были перемещены для процесса валки, т.е., к местоположению процесса валки. Точнее, предварительно записанная функция набора стрел, то есть траектория перемещения набора стрел в направлении лесозаготовительной машины, может быть сформирована таким образом, что задают требуемую форму траектории перемещения, т.е., быстро растущую и соответственно линейную. Нулевая точка траектории перемещения может быть привязана к местоположению валки, когда траектория перемещения между нулевой точкой и лесозаготовительной машиной или местоположением обработки может быть задана так, чтобы иметь выбранную форму, причем она, в частности, первоначально поднимается по направлению к местоположению передачи, после чего происходит линейное перемещение по горизонтали или подъем, или падение под выбранным углом. Оператор может определить профиль траектории перемещения, например, подъем на расстояние 1 метра и иное на той же высоте.
Седьмой вариант осуществления в остальном такой же, как и шестой, но при работе на склоне внимание также уделяется высоте местоположения лесозаготовительной машины относительно нулевой точки. Первое и второе средства определения должны в таком случае определять местоположения и перепады высот местоположений харвестерной головки и лесозаготовительной машины.
В соответствии с восьмым вариантом осуществления способ может быть использован для осуществления подачи дерева во время валки. Это означает, что, когда дерево было распилено и падает, ствол дерева в харвестерной головке подают по направлению к точке резания, когда потенциальная энергия дерева может быть использована и сэкономлено время. Так как дерево движется вниз, это экономит энергию и топливо, так как в горизонтальном положении (обычном состоянии) подача дерева с использованием подающих роликов потребляет больше энергии. Более конкретно, предварительно записанной функцией набора стрел является траектория перемещения, которая реализуется, когда инерциальный измерительный блок харвестерной головки или второе средство определения стрелы указывают, что дерево начало падать.
В соответствии со вторым основным вариантом осуществления деревообрабатывающее устройство действует в качестве рабочего блока, а набор стрел - в качестве блока управления. Когда в первом основном варианте осуществления изобретения, описанном в связи с фиг.1-4b, работой набора стрел управляют полуавтоматически на основе рабочего состояния деревообрабатывающего устройства, во втором основном варианте осуществления возможно соответственно управлять работой деревообрабатывающего устройства полуавтоматически на основе рабочего состояния набора стрел.
Далее описаны примеры второго основного варианта осуществления изобретения, в котором деревообрабатывающее устройство действует в качестве рабочего блока, а набор стрел - в качестве блока управления. Примером такой ситуации является ситуация, когда харвестерную головку, действующую в качестве деревообрабатывающего устройства, используют для захвата дерева на высоте около 2 метров в ситуации, в которой предполагается и необходимо переместить харвестерную головку к комлю (корням) дерева в стволе дерева. Это перемещение требует перемещения набора стрел, чтобы следовать изменяющейся точке крепления и вращению (т.е., подаче) подающих роликов харвестерной головки для перемещения харвестерной головки к комлю дерева.
На фиг.5 показана простая блок-схема реализации второго основного варианта осуществления согласно изобретению. Обычно в способе процесс валки дерева начинается в соответствии с этапом 302, и первоначально состояние или положение харвестерной головки определяют или оценивают в соответствии с этапом 304. Это может означать, например, определение положения зачистных захватных устройств, на основании которого определяют контакт с деревом. В то же время, функцию набора стрел также задают в соответствии с этапом 306, который может быть, например, просто набором стрел, движущимся или нет. Оператор управляет харвестерной головкой с использованием первого средства управления и набором стрел с использованием второго средства управления, например, в соответствии с этапом 308, например, чтобы привести харвестерную головку в контакт с деревом для валки путем перемещения набора стрел по направлению к дереву. Как только оператор направил харвестерную головку для контакта с деревом, и харвестерная головка обнаружила контакт с деревом, оператор вводит первые входные данные, т.е., начинает перемещать набор стрел в соответствии с этапом 310. На основе ранее определенного состояния или положения харвестерной головки, такого как, например, когда зачистные захватные устройства закрыты, оператор может затем выбрать предварительно записанную функцию харвестерной головки из памяти в соответствии с этапом 311. В этом случае функцией может быть, например, перемещение подающих роликов автоматически для следования за набором стрел. Прежде чем запустить предварительно выбранную функцию, автоматика проверяет соблюдение вторых входных данных в соответствии с этапом 312. Критерием вторых входных данных может быть, например, направление перемещения набора стрел, параллельно дереву, или положение зачистных лезвий, с помощью которых определяют диаметр дерева. Деревья с достаточно большим диаметром настолько велики, что устройства подачи харвестерной головки не обязательно могут быть способны перемещать дерево, вместо этого перемещение должно быть выполнено с помощью набора стрел. При соблюдении второго критерия система управления разрешает выполнение предварительно записанной функции в соответствии с этапом 316, а затем выполняет вращение подающих роликов и перемещает подающие ролики вдоль ствола дерева, автоматически контролируя перемещение набора стрел в соответствии с этапом 318. Предпочтительно система управления сопоставляет скорость подачи со скоростью перемещения конца набора стрел вниз, когда это может минимизировать или предотвратить возникновение напряжения в наборе стрел и харвестерной головке. Система управления предпочтительно способна перемещать набор стрел так, чтобы расположить их таким образом, чтобы конец набора стрел соответствовал направлению ствола дерева, так как конец набора стрел направлен, по существу, вниз в случае только одной части набора стрел (т.е., драйвер использует только один контроллер).
Вторым примером реализации второго основного варианта осуществления изобретения является ситуация, в которой дерево было повалено и расположено горизонтально. Особенно выгодно использовать изобретение в ситуации, в которой дерево особенно велико, а мощности набора стрел, лесозаготовительной машины или харвестерной головки недостаточно для обработки дерева обычным образом. Если необходимо проследовать за деревом с помощью крана, перемещение набора стрел и подача харвестерной головки должны быть синхронизированы и параллельны стволу дерева. Затем оператор направляет набор стрел, так что подача харвестерной головки проходит автоматически вдоль ствола дерева после перемещения набора стрел. Таким образом, подачу и функции харвестерной головки заставляют реагировать (например, останавливаться) быстрее, чем перемещение набора стрел. Если перемещение набора стрел внезапно останавливается, подача харвестерной головки также быстро останавливается.
Что выгодно при соединении вместе функций набора стрел и харвестерной головки согласно изобретению, так это то, что перемещение синхронизировано в соответствии с более медленной частью. Т.е., поскольку набор стрел часто перемещается медленнее, чем происходит подача харвестерной головки, тогда предпочтительно, заставить харвестерную головку следовать за функциями стрелы. В этом случае харвестерная головка является рабочим блоком, а набор стрел - блоком управления.
Варианты осуществления изобретения не зависят от присутствия оператора. Другими словами, они могут быть осуществлены на полностью автономной, автоматической или дистанционно управляемой машине. Реализация изобретения требует знания положения и состояния перемещения набора стрел, т.е., зондирования относительно положения и состояния перемещения (ускорения), а также рабочего состояния харвестерной головки.
Группа изобретений относится к управлению лесозаготовительной машиной. В процессе валки дерева управляют деревообрабатывающим устройством с использованием первого средства управления. Набором стрел управляют с использованием второго средства управления. Либо набор стрел, либо деревообрабатывающее устройство представляет собой рабочий блок, а другое соответственно представляет собой блок управления. Предварительно записанная функция рабочего блока задана в памяти и связана с первыми входным данными, созданными оператором для рабочего блока. Выполняют выбор предварительно записанной функции рабочего блока автоматически из памяти на основе первых входных данных, созданных оператором, формирование вторых входных данных на основе определенного текущего рабочего состояния блока управления, которое содержит зависящий от условий критерий для запуска выбранной предварительно записанной функции рабочего блока, запуск выбранной предварительно записанной функции рабочего блока автоматически при соблюдении критерия вторых входных данных, выполнение выбранной предварительно записанной функции рабочего блока, запущенной посредством вторых входных данных. Повышается эффективность работы лесозаготовительной машиной. 3 н. и 15 з.п. ф-лы, 5 ил.
1. Способ управления функциями набора стрел или прикрепленного к ним деревообрабатывающего устройства, включающий: определение и/или оценку положения или состояния в отношении по меньшей мере одной степени свободы набора стрел (12), определение текущего рабочего состояния деревообрабатывающего устройства (14), управление деревообрабатывающим устройством (14) с использованием первого средства управления, управление набором стрел (12) с использованием второго средства (24) управления, причем либо набор стрел (12), либо деревообрабатывающее устройство (14) представляет собой рабочий блок, а другое, соответственно, представляет собой блок управления, причем по меньшей мере одна предварительно записанная функция рабочего блока задана в памяти (32) и связана с первыми входным данными (36), созданными оператором для рабочего блока, и: выбор предварительно записанной функции рабочего блока автоматически из памяти (32) на основе первых входных данных (36), созданных оператором, формирование вторых входных данных (38) на основе определенного текущего рабочего состояния блока управления, которое содержит зависящий от условий критерий для запуска выбранной предварительно записанной функции рабочего блока, запуск выбранной предварительно записанной функции рабочего блока автоматически при соблюдении критерия вторых входных данных (38), выполнение выбранной предварительно записанной функции рабочего блока, запущенной посредством вторых входных данных (38), отличающийся тем, что указанный способ осуществляют в связи с процессом валки дерева, а указанную выбранную предварительно записанную функцию рабочего блока выполняют автоматически.
2. Способ по п.1, отличающийся тем, что по меньшей мере две предварительно записанные функции рабочего блока заданы в памяти.
3. Способ по п.1, отличающийся тем, что указанный критерий является изменением рабочего состояния блока управления.
4. Способ по п.1, отличающийся тем, что указанные первые входные данные (36) сформированы на основе одной или более переменных, причем этими переменными являются: сигнал управления первого средства (22) управления, сигнал управления второго средства (24) управления, определенное свойство дерева (16), определенное в данный момент рабочее состояние блока управления.
5. Способ по п.1, отличающийся тем, что деревообрабатывающее устройство (14) используют в качестве блока управления, а набор стрел (12) - в качестве рабочего блока.
6. Способ по п.5, отличающийся тем, что указанное рабочее состояние, которое должно быть определено на деревообрабатывающем устройстве (14), является одним или более из следующих: перемещение или положение зачистных лезвий (52, 56) деревообрабатывающего устройства (14), перемещение или положение подающих роликов (54, 58) деревообрабатывающего устройства (14), положение деревообрабатывающего устройства (14), вращение или рабочее состояние режущего устройства, предпочтительно режущей пилы (60) деревообрабатывающего устройства (14), положение режущего устройства (60) деревообрабатывающего устройства, высота месторасположения деревообрабатывающего устройства (14) относительно основания набора стрел, положение или рабочее состояние устройства (50) вращения деревообрабатывающего устройства (14).
7. Способ по п.5 , отличающийся тем, что указанной функцией набора стрел (12) является траектория перемещения, выполняемая набором стрел (12), и/или изменение положения набора стрел (12) в отношении по меньшей мере одной степени свободы, и/или увеличение или устранение напряжения с набора стрел (12) в отношении по меньшей мере одной степени свободы путем загрузки второго рабочего устройства (20), принадлежащего набору стрел (12), без перемещения набора стрел (12) или блокировки вторых рабочих устройств (20) набора стрел (12).
8. Способ по п.5, отличающийся тем, что указанные вторые входные данные (38) являются вращением режущей пилы (60) деревообрабатывающего (14) устройства, причем указанным критерием является прекращение валочного распила и указанная функция набора стрел (12) заключается в подъеме набора стрел (12) и сцеплении с основанием набора стрел (12).
9. Способ по п.1, отличающийся тем, что набор стрел (12) используют в качестве блока управления, а деревообрабатывающее устройство (14) - в качестве рабочего блока.
10. Способ по п.9, отличающийся тем, что указанной функцией деревообрабатывающего устройства (14) является перемещение подающих роликов (58), выполняемое деревообрабатывающим устройством (14), причем указанные первые входные данные (36) представляют собой перемещение набора стрел (12) параллельно дереву, а вторые входные данные (38) представляют собой изменение положения подающих роликов (54, 58).
11. Способ по п.1, отличающийся тем, что в способе предварительно записанную функцию рабочего блока задают в памяти (32) до того, как дерево (16) будет повалено.
12. Способ по п.1, отличающийся тем, что предварительно записанные первые входные данные (36) задают в памяти (32) для прерывания выбранной предварительно записанной функции рабочего блока в середине выполнения функции.
13. Способ по п.1, отличающийся тем, что предварительно выбранную функцию рабочего блока выполняют одновременно с функцией блока управления, выполняемой оператором.
14. Способ по п.1, отличающийся тем, что выбранную предварительно записанную функцию рабочего блока, запущенную посредством вторых входных данных (38), выполняют автоматически в отношении по меньшей мере одной степени свободы положения, определенного и/или оцененного рабочим блоком.
15. Устройство для управления лесозаготовительной машиной, причем лесозаготовительная машина (100) включает в себя по меньшей мере: по меньшей мере набор стрел (12) из двух частей, предпочтительно включающий главную стрелу (12.1) и поворотную стрелу (12.2), деревообрабатывающее устройство (14), прикрепленное к набору стрел (12) для валки деревьев (16), первые рабочие устройства (18), расположенные в деревообрабатывающем устройстве (14) для выполнения функций деревообрабатывающего устройства (14), вторые рабочие устройства (20), расположенные в связи с набором стрел (12) для выполнения функций набора стрел (12), первое средство (22) управления для управления первыми рабочими устройствами (18) и второе средство (24) управления для управления вторыми рабочими устройствами (20) для того, чтобы управлять деревообрабатывающим устройством (14) и набором стрел (12), первое средство (26) определения для измерения и/или оценки рабочего состояния деревообрабатывающего устройства (14), выполненное с возможностью получения первого результата определения, второе средство (28) определения для определения и/или оценки положения набора стрел (12) в отношении по меньшей мере одной степени свободы, выполненное с возможностью получения второго результата определения, систему (30) управления для использования сигналов управления, сформированных первым средством (22) управления и вторым средством (24) управления, для управления первыми рабочими устройствами (18) и вторыми рабочими устройствами (20), при этом устройство включает в себя память (32), соединенную с системой (30) управления, и программное средство (34), расположенное в памяти (32), для управления первыми рабочими устройствами (18) и вторыми рабочими устройствами (20), причем одно из набора стрел (12) и деревообрабатывающего устройства (14) является рабочим блоком и, соответственно, другое является блоком управления, а программное средство (34) выполнено с возможностью: определения в памяти (32) по меньшей мере одной предварительно записанной функции рабочего блока, которая связана с первыми входными данными (36) для рабочего блока, и выполнения следующих функций a-d: a) выбора предварительно записанной функции рабочего блока автоматически из памяти (32) на основе первых входных данных, созданных оператором, и b) формирования на основе текущего рабочего состояния блока управления вторых входных данных (38), которые содержат зависящий от условий критерий для запуска выбранной предварительно записанной функции рабочего блока, c) запуска выбранной предварительно записанной функции рабочего блока автоматически при соблюдении критерия вторых входных данных (38) и d) выполнения выбранной предварительно записанной функции рабочего блока, запущенной посредством вторых входных данных (38), отличающееся тем, что указанное программное средство (34) выполнено с возможностью выполнения указанных функций a)-d) в связи с процессом валки дерева и выполнения автоматически выбранной предварительно записанной функции рабочего блока.
16. Устройство по п.15, отличающееся тем, что деревообрабатывающее устройство (14) представляет собой харвестерную головку (14'), которая включает в себя инерциальный измерительный блок для определения состояния перемещения подлежащего валке дерева (16).
17. Устройство по п.15, отличающееся тем, что программное средство (34) выполнено с возможностью автоматического выполнения выбранной предварительно записанной функции рабочего блока, запущенной посредством вторых входных данных (38), на основе определенной и/или оцененной степени свободы рабочего блока.
18. Лесозаготовительная машина, отличающаяся тем, что лесозаготовительная машина (100) включает в себя устройство (10) по п.15.
| EP 2939529 A1, 04.11.2015 | |||
| EP 1988220 A2, 05.11.2008 | |||
| EP 2939530 A1, 04.11.2015 | |||
| СПОСОБ УПРАВЛЕНИЯ ИСТОЧНИКОМ МОЩНОСТИ МАШИНЫ, ИСПОЛЬЗУЕМОЙ В ЛЕСНОМ ХОЗЯЙСТВЕ | 2006 |
|
RU2429363C2 |
| СИСТЕМА И СПОСОБ ДЛЯ МАССОВОЙ ВАЛКИ ДЕРЕВЬЕВ | 2008 |
|
RU2463776C2 |

